Спосіб компенсації сил гіроскопічного моменту


Формула / Реферат
1. Спосіб компенсації сил гіроскопічного моменту з обертанням робочого тіла (1) навколо локальної осі (5), з одночасним переміщенням робочого тіла (1) по замкнутій траєкторії (6) навколо осі примусової прецесії (4) та з узгодженням кутової швидкості Ω прецесії робочого тіла (1) з кутовою швидкістю ω обертання робочого тіла (1) навколо локальної осі (5), який відрізняється тим, що локальну вісь (5) обертання робочого тіла (1) встановлюють відносно осі (4) примусової прецесії під кутом ψ (10), не рівним π/2, а розміри L, r (26) робочого тіла (1) вибирають у відповідності до відстані А (10) від центру мас (7) робочого тіла (1) до осі примусової прецесії (4).
2. Спосіб за п. 1, який відрізняється тим, що кут ψ (10) узгоджують з величиною j=Ω/ω відношення кутової швидкості Ω примусової прецесії до кутової швидкості обертання ω робочого тіла (1), а значення j вибирають кратним цілому числу з діапазону 1≤j≤7.
3. Спосіб за п. 1, який відрізняється тим, що кут нахилу ψ (10) локальної осі (5) робочого тіла (1) до осі примусової прецесії (4) визначають як ψ=arccos(I║/I┴ω/Ω), де I║ - момент інерції робочого тіла (1) відносно локальної осі (5); I┴ - момент інерції робочого тіла (1) відносно осі примусової прецесії (4).
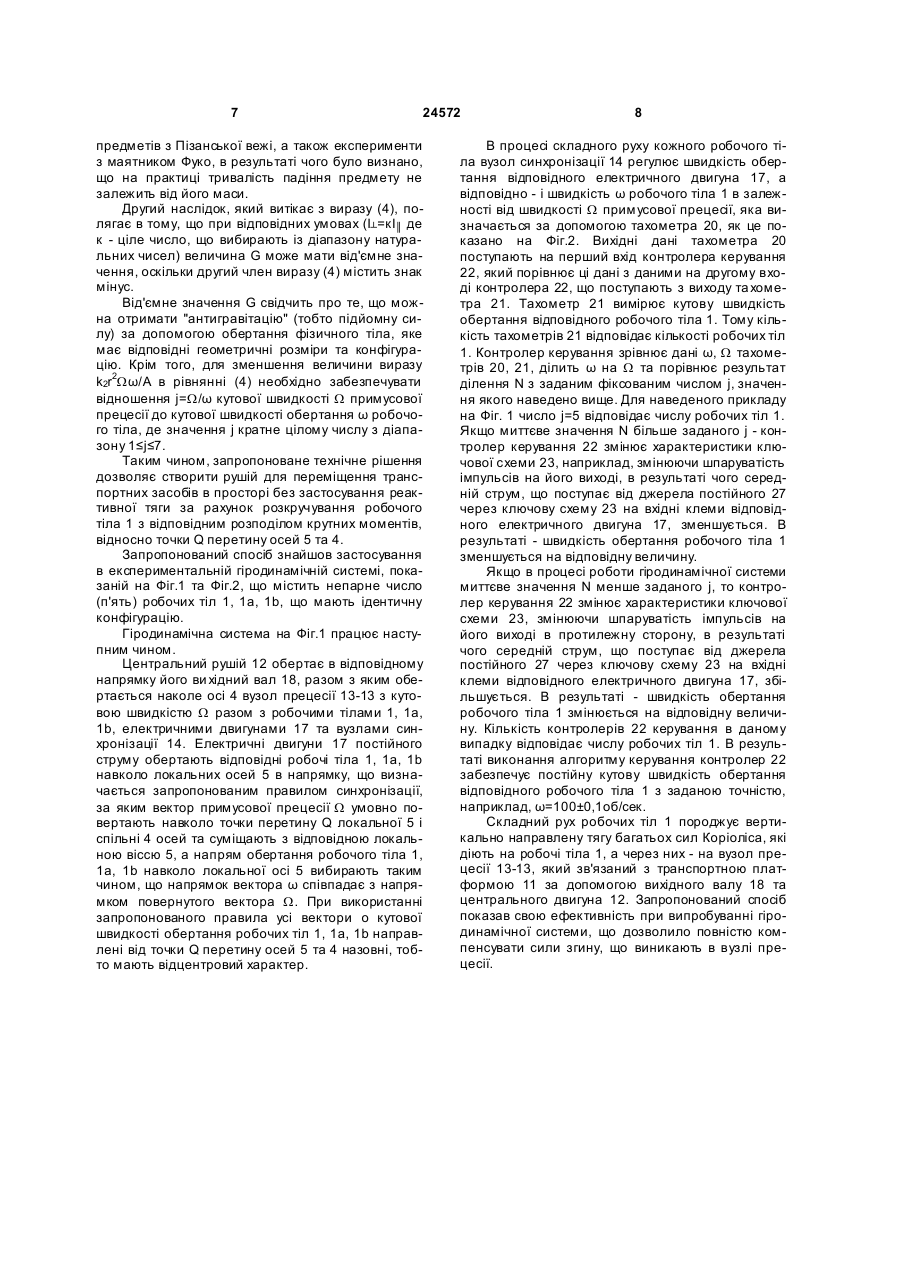
4. Спосіб за п. 1, який відрізняється тим, що використовують електронний вузол (14) синхронізації кутової швидкості ω обертання робочих тіл (1, 1а, 1b) з кутовою швидкістю Ω примусової прецесії навколо спільної осі (4) прецесії; примусову прецесію виконують за допомогою вузла прецесії (13-13) у формі зіркоподібної структури (15, 16) з непарним числом променів (16), які утворюють конус (9) для забезпечення орієнтації локальних осей (5) під кутом ψ (10) до спільної осі прецесії (4), а робочі тіла (1, 1а, 1b) розташовують на відповідних вершинах променів (16) зіркоподібної структури разом з відповідними електричними двигунами (17), що обертають відповідне робоче тіло (1, 1а, 1b).
5. Спосіб за п. 1, який відрізняється тим, що момент інерції I┴ робочого тіла (1, 1а, 1b) відносно осі (4) примусової прецесії узгоджують з моментом інерції I║ робочого тіла (1, 1а, 1b) відносно локальної осі (5) таким чином, що виконується співвідношення I┴=кI║, де к - ціле число.
Текст
1. Спосіб компенсації сил гіроскопічного моменту з обертанням робочого тіла (1) навколо локальної осі (5), з одночасним переміщенням робочого тіла (1) по замкнутій траєкторії (6) навколо осі примусової прецесії (4) та з узгодженням кутової швидкості Ω прецесії робочого тіла (1) з кутовою швидкістю ω обертання робочого тіла (1) навколо локальної осі (5), який відрізняється тим, що локальну вісь (5) обертання робочого тіла (1) встановлюють відносно осі (4) примусової прецесії під кутом ψ (10), не рівним π/2, а розміри L, r (26) робочого тіла (1) вибирають у відповідності до відстані А (10) від центру мас (7) робочого тіла (1) до осі примусової прецесії (4). 2. Спосіб за п. 1, який відрізняється тим, що кут ψ (10) узгоджують з величиною j=Ω/ω відношення кутової швидкості Ω примусової прецесії до кутової швидкості обертання ω робочого тіла (1), а значення j вибирають кратним цілому числу з діапазону 1≤j≤7. 3. Спосіб за п. 1, який відрізняється тим, що кут нахилу ψ (10) локальної осі (5) робочого тіла (1) до U 2 24572 1 3 24572 равлених сил Коріоліса, що дозволяє створити безопорний гірорушій - гіротурбіну для переміщення космічних та літальних апаратів без використання реактивної тяги чи пропелерів. Недоліком відомого способу є наявність гіроскопічного моменту, що діє на кожне окреме робоче тіло відносно точки перетину локальної та спільної осей, в результаті чого виникають значні механічні навантаження згину на конструктивні елементи гіродинамічної системи, яка реалізує відомий спосіб компенсації гіромоменту. Метою пропонованого технічного рішення є узгодження центробіжних сил, які діють на окреме робоче тіло, з силами гіроскопічного моменту, що провертають теж саме робоче тіло відносно точки перетину локальної та спільної осей, для усунення механічних навантажень згину в гіродинамічних системах. З цією метою в способі компенсації гіроскопічного моменту з обертанням робочого тіла навколо локальної осі, з одночасним переміщенням робочого тіла по замкнутій траєкторії навколо осі примусової прецесії та з узгодженням кутової швидкості W прецесії робочого тіла з кутовою швидкістю ω обертання робочого тіла навколо локальної осі, згідно пропозиції, локальну вісь обертання робочого тіла встановлюють відносно осі примусової прецесії під кутом ψ, що не рівний p/2, а розміри робочого тіла вибирають у відповідності до віддалі А від центру мас робочого тіла до осі примусової прецесії. Крім того, згідно пропозиції, кут ψ узгоджують з величиною j=W/ω відношення кутової швидкості W примусової прецесії до кутової швидкості обертання ω робочого тіла, а значення j вибирають кратним числу з діапазону 0,1≤j≤7. Крім того, згідно пропозиції, кут нахилу ψ локальної осі робочого тіла відносно осі примусової прецесії визначають як: ψ=arccos(I║/I┴ω/W), де І║ момент інерції робочого тіла відносно локальної осі; І┴ - момент інерції робочого тіла відносно осі примусової прецесії. Крім того, згідно пропозиції, використовують електронний вузол синхронізації кутової швидкості w обертання робочого тіл з кутовою швидкістью W примусової прецесії навколо спільної осі прецесії, а примусову прецесію виконують за допомогою вузла прецесії в формі зіркоподібної структури з непарним числом променів, які утворюють конус для забезпечення орієнтації локальних осей під кутом y до спільної осі прецесії, а робочі тіла розташовують на відповідних вершинах променів зіркоподібної структури разом з відповідними електричними двигунами, що обертають відповідне робоче тіло. Крім того, згідно пропозиції, момент інерції робочого тіла І┴ відносно осі прецесії узгоджують з моментом інерції І║ робочого тіла відносно відповідної локальної осі так, що виконують співвідношення І┴=кІ║ де к - ціле число. Між досягнутою метою та технічною суттю існує безпосередній причинно-наслідковий зв'язок. Робоче тіло може розглядатися як таке, що складається з багатьох окремих частин. На кожну окрему частину робочого тіла, що обертається та 4 одночасно переміщується навколо осі прецесії, діють одночасно відцентрові сили, сили гіроскопічного моменту, та сили Коріоліса, що створюють безопорну тягу. Завдяки відповідній орієнтації локальної осі робочого тіла відносно осі примусової прецесії під кутом ці забезпечується протидія відцентрових сил силам гіроскопічного моменту, які в даному випадку відіграють шкідливу роль, так як скручують робоче тіло відносно точки перетину локальної осі та осі примусової прецесії. На Фіг.1 показана схема, що пояснює суть пропонованого рішення. На Фіг.2 приведена структурна схема вузла синхронізації. Запропонований спосіб на Фіг.1 реалізують за допомогою робочого тіла 1, що є частиною зрізаного конуса 2, вершина 3 якого направлена в сторону спільної осі 4 прецесії. Робоче тіло 1 обертають навколо локальної осі 5 з кутовою швидкістю w в напрямку С і одночасно переміщують по замкнутій траєкторії 6 навколо осі примусової прецесії 4 з кутовою швидкістю W в напрямку стрілки V. Центр мас 7 робочого тіла 1 розташований на відстані А - 8 від осі примусової прецесії 4, а робоче тіло 1 має відповідну масу М, що визначається розмірами робочого тіла 1 та його питомою вагою. Траєкторія 6 розташована на конусній поверхні 9, що радіально заштрихована на Фіг.1, і являє собою в більшості випадків коло. Локальна вісь обертання 5 робочого тіла 1 розташована під кутом y - 10 відносно осі 4 примусової прецесії, в результаті чого під час складного руху робочого тіла 1 локальна вісь 5 рухається по конусній поверхні 9. Кут ψ вибирають не рівним p/2 та узгоджують з величиною j=W/ω відношення кутової швидкості прецесії W робочого тіла 1 до кутової швидкості ω обертання робочого тіла 1. Значення j вибирають кратним цілому числу в довільних межах, наприклад, j=100, але на практиці значення j вибирають переважно із діапазону 1≤j≤7. Кут нахилу ψ локальної осі 5 робочого тіла 1 відносно осі примусової прецесії 4 визначають як: ψ=arccos(I║/I┴ω/W), де I║ - момент інерції робочого тіла 1 відносно локальної осі 5; I┴ - момент інерції робочого тіла 1 відносно осі 4 примусової прецесії. Спосіб може застосовуватися в гіродинамічний системі, що додатково містить робочі тіла 1a, 1б, транспортну платформу 11, центральний рушій 12, встановлений на транспортній платформі 11, вузол прецесії 13-13 робочих тіл, вузол 14 синхронізації кутової швидкості ω обертання робочих тіл 1, 1a, 1б з кутовою швидкістю W примусової прецесії навколо спільної осі прецесії 4. При цьому вузол прецесії 13-13 виконаний в формі зіркоподібної структури з центральною частиною 15 та непарним числом променів 16. Робочі тіла 1, 1a, 1б розташовані на вершинах променів 16 зіркоподібної структури 15 разом з відповідними електричними двигунами 17. Кожне робоче тіло 1 (1а, 1б) обертається відповідним електричним двигуном 17 навколо відповідної локальної осі 5 з кутовою швидкістю ω обертання. Промені 16 зіркоподібної структури 15-16 утворюють конус 9 для забезпечення орієнтації локальних осей 2 під кутом ψ до спільної осі 4 прецесії, а вихідний вал 18 центра 5 24572 льного рушія 12 прикріплений до центральної частини 15 зіркоподібної структури для забезпечення її обертання навколо спільної осі 4 прецесії разом з вихідним валом 18 з кутовою швидкістю W. Примусову прецесію робочого тіла 1 (1a, 1б) виконують в розрідженому газовому середовищі 19 або в вакуумі для зменшення втрат, що зв'язані з опором повітря, чи іншого газового середовища під час руху робочого тіла 1 по траєкторії 6 примусової прецесії. Крім того, момент інерції I┴ робочого тіла 1 відносно осі 4 примусової прецесії 4 узгоджують з моментом інерції I║ робочого тіла 1 відносно локальної осі 5 таким чином, що виконується співвідношення I┴= кI║ де к - ціле число, що вибирають із діапазону натуральних чисел. Вузол синхронізації 14 кутової швидкості ω обертання робочих тіл з кутовою швидкістю W примусової прецесії містить перший тахометр 20 для вимірювання кутової швидкості W прецесії, другий та хометр 21 для вимірювання кутової швидкості ω обертання робочого тіла 1 (1a, 1б), контролер 22 керування та ключову схему 23 для регулювання швидкості обертання відповідного електричного двигуна 17. Запропонований спосіб на Фіг.1 застосовують наступним чином. Робоче тіло 1 на Фіг.1, що характеризується масою М, обертають за допомогою електричного двигуна 17 з кутовою швидкістю ω навколо локальної осі 5 з одночасною примусовою прецесією за допомогою обертання вертикального валу 18 від центрального рушія 12 по колу 6 навколо осі 4 з кутовою швидкістю примусової прецесії W. Рух робочого тіла 1 по колу характеризується лінійною швидкістю V примусової прецесії, що визначається як V=WA. При складному прецесійно-обертовому рухові частини робочого тіла 1 з кутовою швидкістю W відносно осі примусової прецесії 4 робоче тіло 1 в відповідний момент часу може знаходитися в положенні 1b, що показане на Фіг.1 зліва. Під час руху виникає гіроскопічний момент Tg , який скручує за годинниковою стрілкою частину 25 робочого тіла 1b відносно точки Q перетину локальної осі 5 та осі 4 примусової прецесії. Величина гіроскопічного моменту Tg визначається співвідношенням, що відоме з теорії гіроскопів як: Tg =I║ωW , [Д.В. Сивухин, "Общий курс физики. Т1. Ме ханика." М. Матгиз 1979г., Стор.339, 348 п.8], де I║ момент інерції робочого тіла 1 відносно локальної осі 5. Напрямок дії гіроскопічного моменту Tg визначається відомим правилом М.Є. Жуковського [Н.Е. Жуковский "Кинематика, Статика, Динамика точки" Москва, ОборонГиз, 1939р. - с.67, 68] оскільки гіроскопічний момент Tg є наслідком дії сил Коріоліса. Згідно цього правила вектор швидкості V примусової прецесії повертають на 90° в напрямку С обертання робочого тіла 1b, в результаті чого визначають напрямок дії прискорення Коріоліса, що породжує відповідний гіроскопічний момент Tg , який діє на робоче тіло 1b. Згідно правила Жуковського напрямок дії гіроскопічного моменту Tg 6 співпадає з напрямком повернутого таким чином вектора швидкості V. З іншої сторони, на ту ж саму частину 25 робочого тіла 1b діє відцентрова сила Fv, направлена від осі примусової прецесії 4 назовні, як це показано на Фіг. 1. Відцентрова сила Fv створює обертовий момент, що може діяти проти гіроскопічного моменту Tg в залежності від значення кута нахилу ψ локальної осі. Взаємодія вказаних відцентрових сил та моментів визначається відомим рівнянням, що точно описує поведінку симетричного гіроскопу. Точне рішення задачі симетричного гіроскопу базується на векторній алгебрі і тут не приводиться [Д.В. Сивухин, "Обший курс физики. Т1. Ме ханика." М. Матгиз 1979г., Стор.288, 300 п.8]. Кінцевий вигляд рівняння, що зв'язує частоту ω обертання робочого тіла 1b (1, 1а) і кутову швидкість W прецесії, приведений нижче (1) I┴W 2cosψ-I║Wω+АР=0 де I┴ - момент інерції робочого тіла 1b відносно вертикальної осі 4; I║ - момент інерції робочого тіла 1b відносно його локальної осі 5; Р - вага робочого тіла 1b; А - відстань від центру мас 7 робочого тіла 1b до вертикальної осі 4 прецесії. В процесі складного руху робочого тіла 1 моменти інерції створюють силові навантаження, які є набагато більшими ніж момент АР, що створюється вагою робочого тіла 1, що діє на плече довжиною А. Тому значенням АР можна знехтувати, а кут ψ з рівняння (1) визначається як: ψ=arccos(I|| Wω/(I┴W 2))=arccos(I║/I┴ω/W). Рівняння (1), що описує складний рух робочого тіла 1b, може бути спрощеним завдяки заміні моментів інерції I║ і I┴ на залежності їх від маси М та від розмірів робочого тіла 1 (1a, 1b). В цьому випадку рівняння (1) буде мати наступний вигляд: (2) k1MA2W 2cosψ-k2Mr2Wω+AP=0 де k1≠k2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for compensation of forces of gyroscopic moment
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСпособ компенсации сил гироскопического момента
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: G01C 19/00, B64G 1/28
Мітки: сіль, гіроскопічного, компенсації, спосіб, моменту
Код посилання
<a href="https://ua.patents.su/5-24572-sposib-kompensaci-sil-giroskopichnogo-momentu.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації сил гіроскопічного моменту</a>
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: обертового, аеростатичної, пристрій, вала, компенсації, опори, гіроскопічного, шпиндельної, наприклад, елемента, моменту
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: компенсації, гіромоменту, спосіб
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Спосіб узгодження сил коріоліса
Номер патенту: 19713
Опубліковано: 15.12.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: спосіб, узгодження, коріоліса, сіль
Формула / Реферат:
1. Спосіб узгодження сил Коріоліса, що включає обертання робочих тіл (1а, 16), розподілених навколо відповідних локальних осей (2а, 2б), переміщення усіх робочих тіл по замкнутій траєкторії (5, 7) навколо спільної осі (3) та узгодження швидкості V переміщення кожного робочого тіла (1а, 16) навколо спільної осі (3) зі швидкістю ω обертання кожного робочого тіла (1а, 16) навколо відповідної локальної осі (2а, 2б), який відрізняється тим,...
Система розвантаження силового гіроскопічного комплексу космічного апаратa
Номер патенту: 64339
Опубліковано: 16.02.2004
Автори: Успенський Валерій Борисович, Бандура Іван Миколайович, Голоскоков Євген Григорович, Кузнєцов Юрій Олексійович
МПК: B64G 1/24
Мітки: космічного, система, силового, апарата, розвантаження, гіроскопічного, комплексу
Формула / Реферат:
Система розвантаження силового гіроскопічного комплексу космічного апарата, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок визначення сумарного кінетичного моменту космічного апарата з'єднані з входом блока фіксування допустимого сумарного кінетичного моменту космічного апарата і першим входом блока управління виконавчими органами орієнтації, перший...
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Кулаков Павел Ігоревич, Поджаренко Андрій Володимирович, Кухарчук Василь Васильович, Кучерук Володимир Юрійович
МПК: G01M 1/10
Мітки: визначення, інерції, моменту, механізму, спосіб, приведеного
Формула / Реферат:
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Попередній патент: Спосіб лікування патологічного стирання зубів
Наступний патент: Спосіб виконання реконструкції поверхневої стегнової артерії
Випадковий патент: Інгібітори фосфоінозитид-3-кінази і їх застосування