Спосіб узгодження сил коріоліса
Формула / Реферат
1. Спосіб узгодження сил Коріоліса, що включає обертання робочих тіл (1а, 16), розподілених навколо відповідних локальних осей (2а, 2б), переміщення усіх робочих тіл по замкнутій траєкторії (5, 7) навколо спільної осі (3) та узгодження швидкості V переміщення кожного робочого тіла (1а, 16) навколо спільної осі (3) зі швидкістю ω обертання кожного робочого тіла (1а, 16) навколо відповідної локальної осі (2а, 2б), який відрізняється тим, що використовують парне число робочих тіл, усі робочі тіла (1а, 16) розподіляють на рівні групи, першу групу робочих тіл (1а) обертають навколо спільної осі (3) в напрямку проти годинникової стрілки, а другу групу робочих тіл (16) обертають навколо спільної осі (3) в протилежному напрямку.
2. Спосіб за п. 1, який відрізняється тим, що швидкість обертання Ω робочих тіл (1а, 16) навколо спільної осі (3) синхронізують зі швидкістю ω обертання кожного робочого тіла навколо локальної осі (2а, 2б) так, що підтримують співвідношення N=ω/Ω, де N>1 - ціле число, що дорівнює числу робочих тіл у групі.
3. Спосіб за п. 1, який відрізняється тим, що відстань розташування робочих тіл (1а, 16) відносно спільної осі (3) узгоджують зі швидкістю обертання ω робочих тіл (1а, 16) навколо відповідних локальних осей (2а, 2б).
4. Спосіб за п. 1, який відрізняється тим, що як робоче тіло (1а,1б) використовують потік заряджених часток, які переміщують навколо локальної осі (2а, 2б) по круговій або еліптичній траєкторії.
Текст
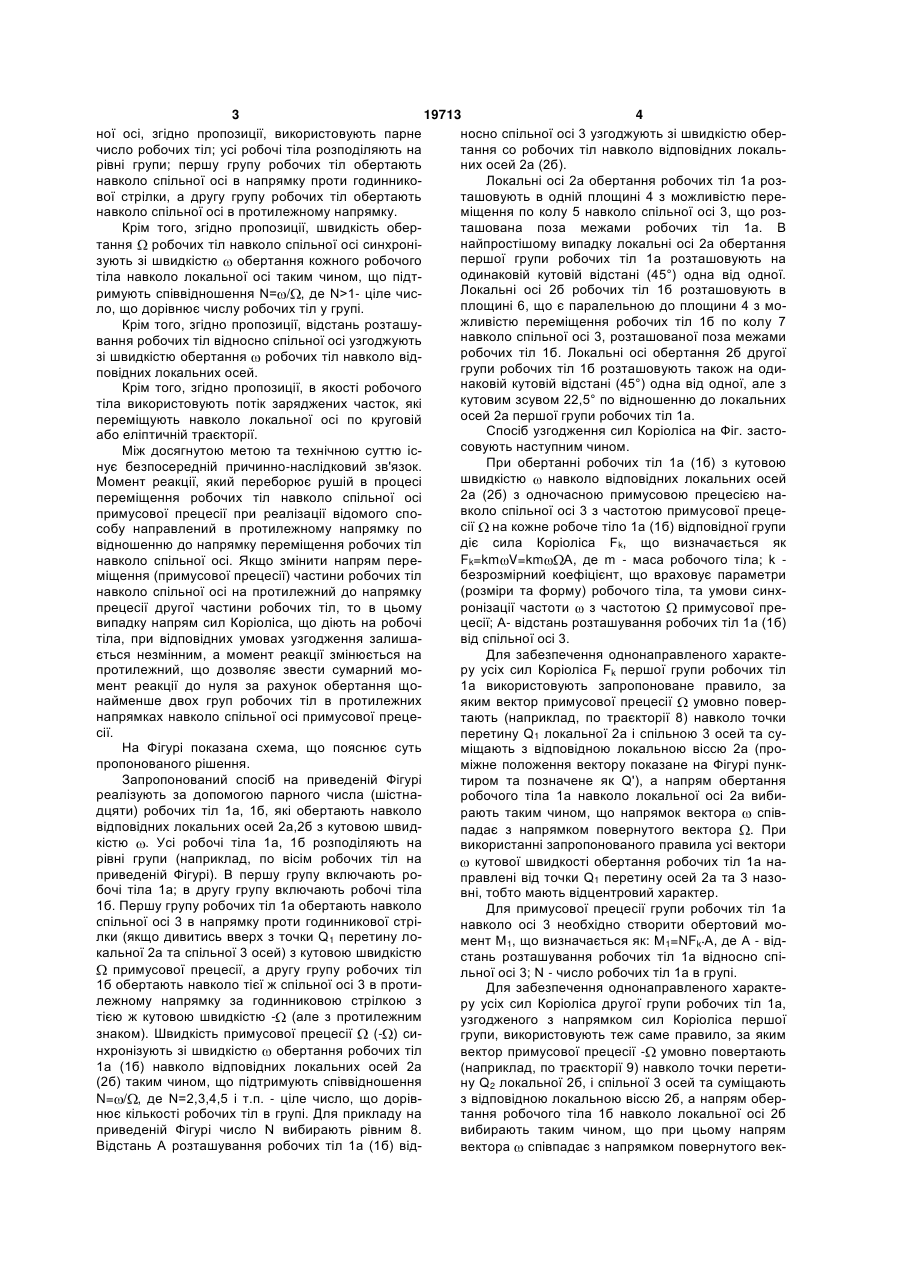
1. Спосіб узгодження сил Коріоліса, що включає обертання робочих тіл (1а, 16), розподілених навколо відповідних локальних осей (2а, 2б), переміщення усіх робочих тіл по замкнутій траєкторії (5, 7) навколо спільної осі (3) та узгодження швидкості V переміщення кожного робочого тіла (1а, 16) навколо спільної осі (3) зі швидкістю ω обертання кожного робочого тіла (1а, 16) навколо відповідної локальної осі (2а, 2б), який відрізняється тим, що використовують парне число робочих тіл, усі робочі тіла (1а, 16) розподіляють на рівні групи, першу групу робочих тіл (1а) обертають навколо спільної осі (3) в напрямку проти годинникової 3 19713 4 ної осі, згідно пропозиції, використовують парне носно спільної осі 3 узгоджують зі швидкістю оберчисло робочих тіл; усі робочі тіла розподіляють на тання со робочих тіл навколо відповідних локальрівні групи; першу групу робочих тіл обертають них осей 2а (2б). навколо спільної осі в напрямку проти годинникоЛокальні осі 2а обертання робочих тіл 1а розвої стрілки, а другу групу робочих тіл обертають ташовують в одній площині 4 з можливістю перенавколо спільної осі в протилежному напрямку. міщення по колу 5 навколо спільної осі 3, що розКрім того, згідно пропозиції, швидкість оберташована поза межами робочих тіл 1а. В найпростішому випадку локальні осі 2а обертання тання робочих тіл навколо спільної осі синхроніпершої групи робочих тіл 1а розташовують на зують зі швидкістю обертання кожного робочого одинаковій кутовій відстані (45°) одна від одної. тіла навколо локальної осі таким чином, що підтЛокальні осі 2б робочих тіл 1б розташовують в римують співвідношення N= / , де N>1- ціле чисплощині 6, що є паралельною до площини 4 з моло, що дорівнює числу робочих тіл у групі. жливістю переміщення робочих тіл 1б по колу 7 Крім того, згідно пропозиції, відстань розташунавколо спільної осі 3, розташованої поза межами вання робочих тіл відносно спільної осі узгоджують робочих тіл 1б. Локальні осі обертання 2б другої зі швидкістю обертання робочих тіл навколо відгрупи робочих тіл 1б розташовують також на одиповідних локальних осей. наковій кутовій відстані (45°) одна від одної, але з Крім того, згідно пропозиції, в якості робочого кутовим зсувом 22,5° по відношенню до локальних тіла використовують потік заряджених часток, які осей 2а першої групи робочих тіл 1а. переміщують навколо локальної осі по круговій Спосіб узгодження сил Коріоліса на Фіг. застоабо еліптичній траєкторії. совують наступним чином. Між досягнутою метою та технічною суттю ісПри обертанні робочих тіл 1а (1б) з кутовою нує безпосередній причинно-наслідковий зв'язок. швидкістю навколо відповідних локальних осей Момент реакції, який переборює рушій в процесі 2а (2б) з одночасною примусовою прецесією напереміщення робочих тіл навколо спільної осі вколо спільної осі 3 з частотою примусової прецепримусової прецесії при реалізації відомого спосії на кожне робоче тіло 1а (1б) відповідної групи собу направлений в протилежному напрямку по діє сила Коріоліса Fk, що визначається як відношенню до напрямку переміщення робочих тіл Fk=km V=km A, де m - маса робочого тіла; k навколо спільної осі. Якщо змінити напрям перебезрозмірний коефіцієнт, що враховує параметри міщення (примусової прецесії) частини робочих тіл (розміри та форму) робочого тіла, та умови синхнавколо спільної осі на протилежний до напрямку прецесії другої частини робочих тіл, то в цьому ронізації частоти з частотою примусової превипадку напрям сил Коріоліса, що діють на робочі цесії; А- відстань розташування робочих тіл 1а (1б) тіла, при відповідних умовах узгодження залишавід спільної осі 3. ється незмінним, а момент реакції змінюється на Для забезпечення однонаправленого характепротилежний, що дозволяє звести сумарний мору усіх сил Коріоліса Fk першої групи робочих тіл мент реакції до нуля за рахунок обертання що1а використовують запропоноване правило, за найменше двох груп робочих тіл в протилежних яким вектор примусової прецесії умовно повернапрямках навколо спільної осі примусової прецетають (наприклад, по траєкторії 8) навколо точки сії. перетину Q1 локальної 2а і спільною 3 осей та суНа Фігурі показана схема, що пояснює суть міщають з відповідною локальною віссю 2а (пропропонованого рішення. міжне положення вектору показане на Фігурі пункЗапропонований спосіб на приведеній Фігурі тиром та позначене як Q'), а напрям обертання реалізують за допомогою парного числа (шістнаробочого тіла 1а навколо локальної осі 2а вибидцяти) робочих тіл 1а, 1б, які обертають навколо рають таким чином, що напрямок вектора співвідповідних локальних осей 2а,2б з кутовою швидпадає з напрямком повернутого вектора . При кістю . Усі робочі тіла 1а, 1б розподіляють на використанні запропонованого правила усі вектори рівні групи (наприклад, по вісім робочих тіл на кутової швидкості обертання робочих тіл 1а наприведеній Фігурі). В першу групу включають роправлені від точки Q1 перетину осей 2а та 3 назобочі тіла 1а; в другу групу включають робочі тіла вні, тобто мають відцентровий характер. 1б. Першу групу робочих тіл 1а обертають навколо Для примусової прецесії групи робочих тіл 1а спільної осі 3 в напрямку проти годинникової стрінавколо осі 3 необхідно створити обертовий молки (якщо дивитись вверх з точки Q1 перетину ломент М1, що визначається як: М1=NFk A, де А - відкальної 2а та спільної 3 осей) з кутовою швидкістю стань розташування робочих тіл 1а відносно спіпримусової прецесії, а другу групу робочих тіл льної осі 3; N - число робочих тіл 1а в групі. 1б обертають навколо тієї ж спільної осі 3 в протиДля забезпечення однонаправленого характележному напрямку за годинниковою стрілкою з ру усіх сил Коріоліса другої групи робочих тіл 1а, тією ж кутовою швидкістю - (але з протилежним узгодженого з напрямком сил Коріоліса першої знаком). Швидкість примусової прецесії (- ) сигрупи, використовують теж саме правило, за яким нхронізують зі швидкістю обертання робочих тіл вектор примусової прецесії - умовно повертають 1а (1б) навколо відповідних локальних осей 2а (наприклад, по траєкторії 9) навколо точки перети(2б) таким чином, що підтримують співвідношення ну Q2 локальної 2б, і спільної 3 осей та суміщають N= / , де N=2,3,4,5 і т.п. - ціле число, що дорівз відповідною локальною віссю 2б, а напрям обернює кількості робочих тіл в групі. Для прикладу на тання робочого тіла 1б навколо локальної осі 2б приведеній Фігурі число N вибирають рівним 8. вибирають таким чином, що при цьому напрям Відстань А розташування робочих тіл 1а (1б) відвектора співпадає з напрямком повернутого век 5 19713 6 При цьому М2=-М1, завдяки чому сумарний момент тора - . При використанні запропонованого прареакції такої гіродинамічної системи робочих тіл вила усі вектори кутової швидкості обертання 1а, 1б зводиться до нуля. робочих тіл 2б направлені в точку Q2 перетину В якості робочого тіла 1а, (1б) може бути виосей 2б та 3 іззовні, тобто мають доцентровий користаний жорсткий кільцевий маховик, або згідхарактер. но пропозиції - потік заряджених часток (плазми, Застосування запропонованого правила гарапотоку електронів), які переміщують всередині нтує, що для кожного робочого тіла 1а (1б) забезпустотілого кільця, що нерухомо закріплене симепечується однонаправлений характер дії сил Корітрично осі 2а (2б). Замість обертання робочого оліса Fk (Fk'), які направлені на приведеній Фігурі тіла 1а (1б) навколо локальної осі 2а (2б) пропонувздовж спільної осі 3. В цьому можна пересвідчиється переміщувати з великою швидкістю робочу тися, застосовуючи правило М.Е.Жуковського плазму, або потік електронів у провіднику. [Н.Е. Жуковский "Кинематика, Статика, Динамика Розрахунки свідчать, що при наявності кільцеточки" Москва, ОборонГиз, 1939р. -с.67,68] для вих робочих тіл з сумарною масою плазми довільного робочого тіла 1а (1б). Згідно цього праm=0.1кг; швидкості переміщення плазми вила вектор швидкості переміщення V повертають на 90° в напрямку обертання вектора кутової шви=60000об/хв=1000об/сек; швидкості V=100м/сек примусової перцесії робочої плазми навколо спідкості відповідного робочого тіла 1а (1б), в рельної осі 3 можна отримати значення сили тяги зультаті чого визначають напрямок сили Коріоліса Коріоліса для такої гіродинамічної системи з робоFk, що діє на відповідне робоче тіло. При цьому, чою плазмою в якості робочих тіл згідно правила Жуковського, сила Коріоліса Fk співпадає з напрямком повернутого таким чином Fk=0.1кг 2 1000рад/сек 100м/сек=62800кгм/сек2 вектора швидкості V, в результаті чого виникає =62,0КН (КілоНьютон) в системі СІ. тягове зусилля, щонайменше 16-и однонаправлеРозрахункові дані підтверджено на експериних сил Коріоліса, що дозволяє переміщати літаментальній гіродинамічній системі, що реалізована льні апарати в просторі без застосування реактивв відповідності до пропонованого способу узгоної тяги за рахунок розкручування робочих тіл 1а, дження сил Коріоліса з використанням потоку еле1б (маховиків) з відповідною синхронізацією. ктронів, що рухаються по електричному провіднику Для примусової прецесії групи робочих тіл 1б (по обмотці з відповідною конфігурацією витків). навколо осі 3 необхідно створити обертовий момент М2, що визначається як: М2=NFk A, де А - відстань розташування робочих тіл 1б відносно спільної осі 3; N - число робочих тіл 1б в другій групі. Комп’ютерна верстка Л.Литвиненко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of matching of coriolis forces
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСпособ согласования сил кориолиса
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: G01C 19/00, B64G 1/28
Мітки: сіль, спосіб, коріоліса, узгодження
Код посилання
<a href="https://ua.patents.su/3-19713-sposib-uzgodzhennya-sil-koriolisa.html" target="_blank" rel="follow" title="База патентів України">Спосіб узгодження сил коріоліса</a>
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: гіромоменту, спосіб, компенсації
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Спосіб визначення коефіцієнту спектрального узгодження для моно- або поліхроматичного джерела світового випромінювання
Номер патенту: 16997
Опубліковано: 29.08.1997
Автори: Оснач Роман Ромеович, Померанцев Віктор Вадимович, Мицай Лариса Йосипівна, Мешман Олександр Петрович
МПК: G01J 1/00, G01J 3/00, G01J 1/10
Мітки: коефіцієнту, визначення, випромінювання, моно, узгодження, спектрального, джерела, світового, спосіб, поліхроматичного
Формула / Реферат:
Способ определения коэффициента спектрального согласования для моно- или полихроматического источника светового излучения, включающий определение спектрального состава источника светового излучения и градуировку эталонного фотоприемника с последующим определением коэффициента их спектрального согласования, отличающийся тем, что исследуемый и эталонный фотоприемник облучают интегральным потоком от исследуемого источника светового...
Спосіб узгодження режимів роботи електроприводів реверсивного прокатного стану з вертикальними та горизонтальними валками при одночасній прокатці металу у вертикальних та горизонтальних валках
Номер патенту: 23186
Опубліковано: 19.05.1998
Автори: Мовшович Вілорд Соломонович, Світличний Олексій Васильович, Тилик Василь Трохимович, Феофілактов Андрій Вікторович, Штехно Олег Миколайович, Калабухов Віктор Іванович, Кузьмін Олександр Вікторович, Будаква Сергій Анатолійович, Дишлевич Ігор Йосипович, Ситий Володимир Іванович
МПК: B21B 37/00
Мітки: спосіб, роботи, одночасній, режимів, валках, металу, стану, вертикальними, горизонтальних, горизонтальними, реверсивного, прокатці, електроприводів, валками, прокатного, узгодження, вертикальних
Формула / Реферат:
Способ согласования режимов работы электроприводов реверсивного прокатного стана с вертикальными и горизонтальными валками при одновременной прокатке металла в вертикальных и горизонтальных валках, включающий определение среднего значения статического тока электропривода вертикальных валков при движении металла от вертикальных валков к горизонтальным до захвата металла валками последующей горизонтальной клети, поддержание статического тока...
Пристрій для узгодження системних магістралей
Номер патенту: 323
Опубліковано: 30.04.1993
Автори: Коваль Микола Олексійович, Сердюк Юрій Авксентійович
МПК: G06F 13/36
Мітки: узгодження, системних, пристрій, магістралей
Формула / Реферат:
Формула изобретенияУстройство для согласования системных магистралей, содержащее генератор импульсов, регистровый приемник адреса первой магистрали, регистровые приемник и передатчик данных первой магистрали, приемник и передатчик данных второй магистрали, блок управления режимом исполнителя, блок отработки прерывания, причем информационные входы регистрового приемника адреса, информационные входы регистрового приемника данных и выходы...
Механізм узгодження приймача із захисним модулем
Номер патенту: 60366
Опубліковано: 15.10.2003
Автори: Кудельскі Андре, Сасселлі Марко
МПК: H04N 7/16
Мітки: захисним, приймача, модулем, узгодження, механізм
Формула / Реферат:
1. Система прийому платного телебачення, яка містить приймач (А), з'єднаний із захисними засобами (С, D, F), який для усунення завад отримує інформацію від частини захисних засобів (С, D, F), яка відрізняється тим, що щонайменше частина інформації (4, 6) передається зашифрованою однозначним шифрувальним ключем захисними засобами (С, D, F) до приймача (А).2. Система за п. 1, яка відрізняється тим, що однозначний шифрувальний ключ є...
Попередній патент: Спосіб підвищення молочної продуктивності корів
Наступний патент: Комплекс тонкодисперсного дрібнення матеріалів
Випадковий патент: Спосіб укріплення слабких водонасичених лесових ґрунтів