Спосіб компенсації гіромоменту
Формула / Реферат
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.
2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово переміщують навколо спільної осі по круговій траєкторії.
3. Спосіб за п. 1, який відрізняється тим, що відстань розташування центра мас робочого тіла відносно спільної осі визначають наступним співвідношенням: В=(M/![]() M
M![]() ))0,5,
))0,5,
де: М - величина гіромоменту, що компенсують; ![]() - кутова швидкість обертання робочого тіла (4);
- кутова швидкість обертання робочого тіла (4); ![]() - безрозмірний коефіцієнт пропорційності; M - маса робочого тіла (4);
- безрозмірний коефіцієнт пропорційності; M - маса робочого тіла (4); ![]() - кутова швидкість робочого тіла відносно спільної осі.
- кутова швидкість робочого тіла відносно спільної осі.
4. Спосіб за п. 1, який відрізняється тим, що локальні осі робочих тіл розташовують на однаковій кутовій відстані одна від одної в площині, перпендикулярній до спільної осі робочих тіл.
5. Спосіб за п. 1, який відрізняється тим, що напрям обертання кожного робочого тіла навколо його локальної осі визначають правилом, за яким вектор кутової швидкості відносно спільної осі повертають і суміщують з кожною локальною віссю обертання відповідного робочого тіла, а напрям обертання робочого тіла навколо відповідної локальної осі узгоджують з напрямком обертання повернутого вектора кутової швидкості.
6. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово переміщують навколо спільної осі по еліптичній траєкторії.
7. Спосіб за п. 1, який відрізняється тим, що як робоче тіло використовують робочу рідину, котру переміщують навколо локальної осі.
8. Спосіб за п. 7, який відрізняється тим, що як робочу рідину використовують ртуть, котру переміщують навколо локальної осі.
9. Спосіб за п. 1, який відрізняється тим, що швидкість V переміщення робочого тіла навколо спільної осі узгоджують з швидкістю ![]() обертання робочого тіла навколо локальної осі.
обертання робочого тіла навколо локальної осі.
10. Спосіб за пп. 7 та 8, який відрізняється тим, що робочу рідину навколо локальної осі переміщують по круговій або еліптичній траєкторії.
Текст
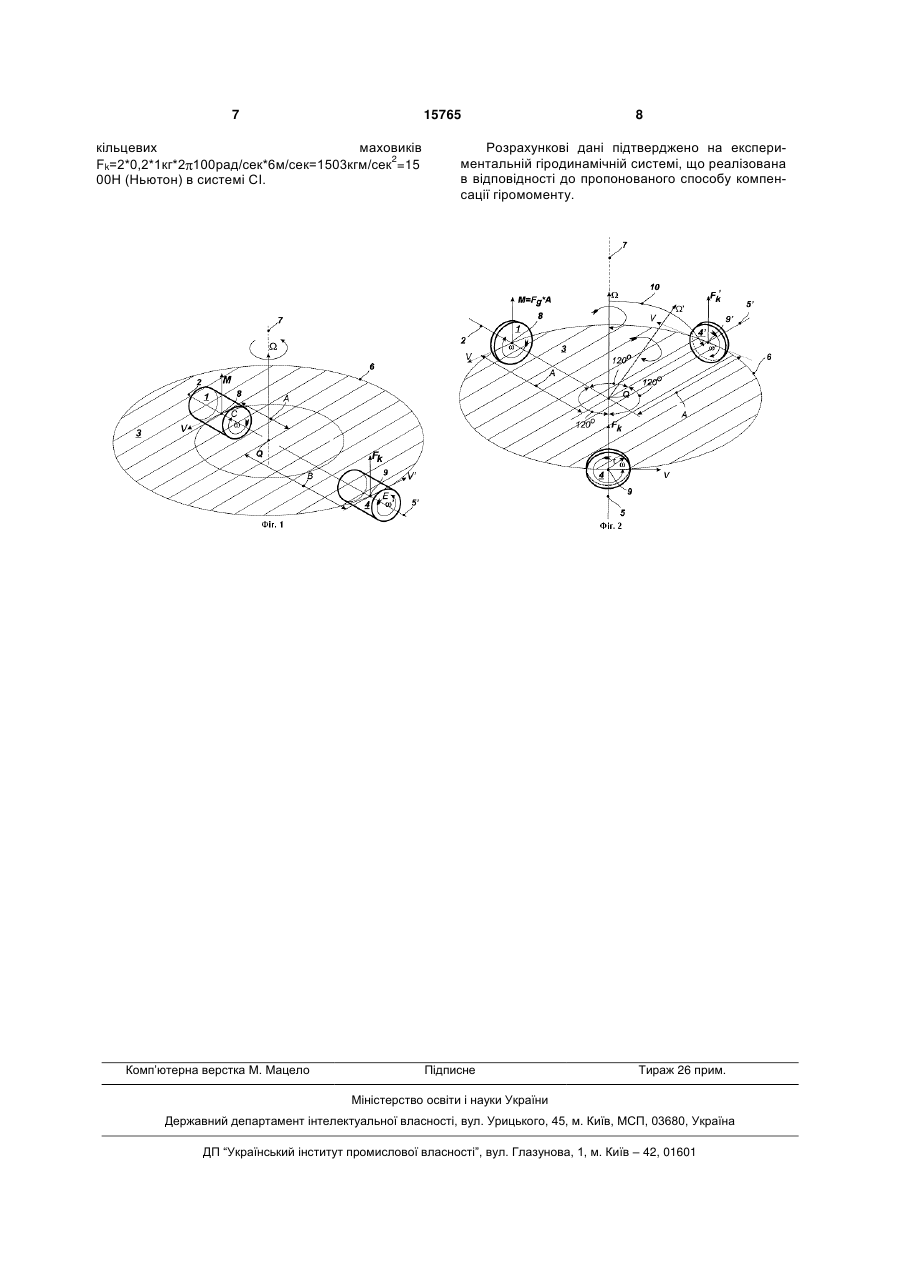
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл. 2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово переміщують навколо спільної осі по круговій траєкторії. 3. Спосіб за п. 1, який відрізняється тим, що відстань розташування центра мас робочого тіла відносно спільної осі визначають наступним співвідношенням: В=(M/ k M ))0,5, де: М - величина гіромоменту, що компенсують; - кутова швидкість обертання робочого тіла (4); k безрозмірний коефіцієнт пропорційності; M - маса робочого тіла (4); - кутова швидкість робочого тіла відносно спільної осі. 4. Спосіб за п. 1, який відрізняється тим, що локальні осі робочих тіл розташовують на однаковій U 2 15765 1 3 навколо локальної осі його одночасно повертають навколо другої осі, що є перпендикулярною до локальної осі та проходить через центр мас робочого тіла. Ефект появи гіромоменту використовують в гідродинамічних гіроскопах [див., наприклад, патент Російської Федерації №95120281 "Гидродинамический гироскоп", дата публікації - 1997.10.27, М. Кл. G01С19/00) та в гіродинах космічних апаратів (див. патент РФ №1839792 "Силовое гироскопическое устройство для управления ориентацией космических аппаратов", дата публікації 2005.05.10, М. Кл. B64G1/28, G01C19/00], де встановлюють маховики, що обертаються з великою кутовою швидкістю до 30000об./хв. При обертанні маховика силового гіроскопу навколо локальної осі і одночасному його повороті навколо другої осі, що є перпендикулярною до локальної осі маховика та проходить через його центр мас, виникає силовий момент, направлений ортогонально до обох осей, величина якого пропорційна величині кінетичного моменту маховика гіроскопу та величині кутової швидкості повороту гіроскопу навколо другої осі. Вказаний гіроскопічний момент діє на транспортний засіб (космічний апарат) і розвертає його, що в ряді випадків є небажаним явищем. Метою пропонованого технічного рішення є спосіб компенсації гіроскопічного моменту в силових гіроскопічних системах за рахунок використання пари однонаправлених сил Коріоліса, що діють на робочі тіла - маховики силових гіроскопів. З цією метою в способі компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, згідно пропозиції, обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл. Крім того, згідно пропозиції, робочі тіла примусово переміщують навколо спільної осі по круговій траєкторії. Крім того, згідно пропозиції, відстань В розташування центру мас робочого тіла відносно спільної осі визначають наступним співвідношенням: В=(M/( kЖ ))0,5, де - величина гіромоменту, що компенсують; -кутова швидкість обертання робочого тіла (маховика); k - безрозмірний коефіцієнт пропорційності, що враховує геометрію робочого тіла; Ж - маса робочого тіла; - кутова швидкість робочого тіла відносно спільної осі. Крім того, згідно пропозиції, локальні осі робочих тіл розташовують на одинаковій кутовій відстані одна від одної в площині, перпендикулярній до спільної осі робочих тіл. Крім того, згідно пропозиції, напрям обертання кожного робочого тіла навколо його локальної осі визначають правилом, за яким вектор кутової швидкості відносно спільної осі повертають і суміщують з кожною локальною віссю обертання відповідного робочого тіла, а напрям обертання робочого тіла навколо відповідної локальної осі узгоджують з напрямком обертання повернутого вектора кутової швидкості. 15765 4 Крім того, згідно пропозиції, робочі тіла примусово переміщують навколо спільної осі по еліптичній траєкторії. Крім того, згідно пропозиції, в якості робочого тіла використовують робочу рідину, яку примусово переміщують по замкнутій траєкторії навколо локальної осі. Крім того, згідно пропозиції, в якості робочої рідини використовують ртуть, яку примусово переміщують по замкнутій траєкторії навколо локальної осі. Крім того, згідно пропозиції, швидкість V переміщення робочого тіла навколо спільної осі синхронізують з швидкістю обертання робочого тіла навколо локальної осі. Крім того, згідно пропозиції, робочу рідину навколо локальної осі переміщують по круговій, або еліптичній траєкторії. Між досягнутою метою та технічною суттю існує безпосередній причинно-наслідковий зв'язок. При складному обертально-прецесійному рухові матеріальної точки з відповідною швидкістю виникає прискорення Коріоліса, орієнтація якого є перпендикулярною до векторів кутової швидкості обертання та лінійної швидкості прецесії. Згідно пропонованого технічного рішення переміщення матеріальної точки (робочого тіла силового гіроскопу), що обертається навколо локальної осі обертання, доповнено переміщенням додаткового робочого тіла з відповідною швидкістю V по замкнутій траєкторії навколо осі, яка розташована поза межами центрів мас робочих тіл на відповідній відстані. Оскільки швидкість примусової прецесії V, тобто руху робочого тіла по замкнутій траєкторії, наприклад, по колу, має лінійну складову, то в цьому випадку виникає прискорення Коріоліса, яке створює силовий момент, що діє на додаткове розкручене робоче тіло, та компенсує гіромомент, створений обертовим робочим тілом силового гіроскопу. На Фіг.1 показана схема, що пояснює суть пропонованого рішення. На Фіг.2 показана схема, що пояснює спосіб компенсації гіроскопічного моменту при збільшеному числі робочих тіл - маховиків. В найпростішому випадку спосіб компенсації гіроскопічного моменту М представлений на Фіг.1. Гіромомент М діє на перше робоче тіло (наприклад, маховик) 1 силового гіроскопу, який обертають в напрямку С навколо локальної осі 2, розташованій в площині 3 (що заштрихована на Фіг.1). Компенсацію гіромоменту М реалізують за допомогою обертання додаткового маховика 4 навколо локальної осі обертання 5, що співпадає з локальною віссю 2 обертання маховика 1. Обидва маховики 1 та 4 примусово переміщують по замкнутій траєкторії 6 навколо спільної осі 7, що розташована на відстанях А та В від центрів мас 8 та 9 відповідно маховиків 1 та 4. Спільну вісь 7 орієнтують перпендикулярною до локальної осі 2 (5). Згідно пропонованого рішення в найпростішому випадку замкнута траєкторія 6 примусової прецесії маховиків 1 та 4 являє собою коло. В ряді випадків є недоцільно (або неможливо) встановити додаткове робоче тіло 4 на спільній 5 локальній осі 2 першого робочого тіла 1, тому пропонується встановити декілька робочих тіл в одній площині 3. На Фіг.2 робоче тіло 1 обертається з кутовою швидкістю навколо локальної осі 2, розташованій в площині 3 (заштрихованій на Фіг.2). Запропонований спосіб на Фіг.2 реалізують за допомогою декількох додаткових робочих тіл 4, 4', розподілених навколо відповідних локальних осей 5, 5'. Кожне робоче тіло 1, 4, 4' встановлене на обертовій платформі в площині 3 з можливістю переміщення по колу 6 навколо спільної осі 7, що розташована поза центрами мас 8, 9, 9' всіх робочих тіл, причому робочі тіла 1, 4, 4' встановлені з можливістю обертання навколо відповідних локальних осей 2, 5, 5'. Спосіб компенсації гіромоменту М на Фіг.1 застосовують наступним чином. При обертанні робочого тіла 1 силового гіроскопу з кутовою швидкістю навколо локальної осі 2 виникає гіроскопічний момент М, направлений перпендикулярно до площини 3, і визначається як M=Fg*A, де Fg - сила Коріоліса, що діє на нього, А віддаль центру мас 8 робочого тіла 1 від спільної осі 7. Для компенсації гіромоменту М робочого тіла 1 силового гіроскопу на локальній осі 5, що співпадає з локальною віссю 2, встановлюють додаткове робоче тіло 4; розкручують його з кутовою швидкістю ', в напрямку, протилежному до напрямку обертання першого робочого тіла 1 та примусово переміщують його з швидкістю V' в площині 3 навколо спільної осі 7 по замкнутій траєкторії 6 синхронно з переміщенням першого робочого тіла 1. При цьому напрям сили Коріоліса Fk, що діє на додаткове робоче тіло 4, співпадає з напрямком гіромоменту М, що діє на робоче тіло 1 силового гіроскопу, і компенсує його частково або повністю. В цьому можна пересвідчитися, застосовуючи правило Жуковського для додаткового робочого тіла 4. Згідно цього правила вектор швидкості переміщення V' повертають в напрямку обертання вектора кутової швидкості ' додаткового робочого тіла 4, в результаті чого визначають напрям сили Коріоліса Fk, що діє на додаткове робоче тіло 4. При цьому згідно правила Жуковського сила Коріоліса Fk співпадає з напрямком повернутого таким чином вектора швидкості V'. Абсолютна величина сили Коріоліса Fk прямо пропорційна добутку кутової швидкості ' робочого тіла 4 на швидкість переміщення V та на масу Ж робочого тіла 4, а саме: Fk=kЖ 'V', де k - безрозмірний коефіцієнт пропорційності, що враховує геомеричну конфігурацію робочого тіла 4 та умови його обертання навколо осей 5 та 7. Робочі тіла 1 та 4 переміщують синхронно, завдяки чому є справедливим наступне співвідношення V/A=V'/B= , де - кутова швидкість переміщення (примусової прецесії) робочих тіл 1 та 4 навколо спільної осі 7, наприклад, по колу 6. Для компенсації гіромоменту М необхідно, щоб виконувалася умова M=FkB, тобто M=kЖ 'V'B=kЖ 'B2 , звідки визначають відстань В розташування додаткового робочого тіла 4 відносно спільної осі 7: В=(M/(km ' ))0,5. Спосіб компенсації гіромоменту на Фіг.2 застосовують аналогічно. При цьому локальні осі 2, 5 15765 6 (5') робочих тіл 1, 4 та 4' розташовують на одинаковій кутовій відстані (120°) одна від одної в площині 3, перпендикулярній до спільної осі 7 обертання робочих тіл 1, 4 (4'). В найпростішому випадку центри мас 8, 9 (9') усіх робочих тіл 1, 4 та 4' розташовують на одинаковій відстані А від спільної осі обертання 7. Кількість локальних осей 5 може бути якою завгодно і визначається розмірами площини 3 та робочих тіл 4. Напрям обертання робочого тіла 1, 4 (4') на Фіг.2 навколо його локальної осі 2, 5 (5') визначають запропонованим правилом, за яким вектор кутової швидкості обертання навколо спільної осі 7 повертають, наприклад, по траєкторії 10 і суміщують з локальною віссю 5 (5') обертання відповідного робочого тіла 4 (4') (проміжне положення вектора кутової швидкості ' при повороті показано на Фіг.2 пунктиром). При цьому напрям обертання робочого тіла 1, 4 (4') навколо відповідної локальної осі 5(5') повинен співпадати з напрямком обертання повернутого вектора кутової швидкості Q'. Застосування запропонованого правила гарантує, що для кожного робочого тіла 4 (4') забезпечується напрямок дії сили Коріоліса Fk (Fk'), яка співпадає з напрямком гіромоменту М=FgA, що діє на перше робоче тіло 1, і повністю його компенсує. При цьому сила Коріоліса Fk=kЖ V на Фіг.1 та Фіг.2 направлена в тому ж напрямку, що і сила Fg (Fg=M/A), в результаті чого виникає тягове зусилля, щонайменше пари однонаправлених сил Коріоліса (на Фіг.2 трьох однонаправлених сил Коріоліса), що дозволяє переміщати космічні апарати в просторі без застосування реактивної тяги, за рахунок розкручування робочих тіл 4 (маховиків) з відповідною синхронізацією. Значення безрозмірного коефіцієнту k визначається конфігурацією та умовами руху робочиго тіла 1 (4, 4'), що обертається з кутовою швидкістю навколо локальної осі 5 та з кутовою швидкістю навколо спільної осі 7. В якості робочого тіла 4 може бути використаний жорсткий кільцевий маховик, або згідно пропозиції - важка рідина, яка проходить всередині пустотілого кільця, що нерухомо закріплене симетрично осі 5. Замість обертання робочого тіла 4 навколо локальної осі 5 пропонується помпувати робочу рідину по кільцю з великою швидкістю. Очевидно, що чим більша питома вага такої рідини-маховика, тим більша сила Коріоліса створюється при тих же розмірах пустотілого кільця 4. Тому в якості робочої рідини пропонується використати ртуть, яку переміщують по кільцевому або еліптичному трубопроводу з великою швидкістю за допомогою електромагнітної помпи. Значення k в формулі Fk=kЖ V для визначення сили Коріоліса при умові використання кільцевого робочого тіла (маховика) може знаходитися в діапазоні від 0,1 до 1,85 в залежності від умов синхронізації обертання робочих тіл. Розрахунки свідчать, що при наявності двох кільцевих маховиків з масою Ж=1кг кожного; швидкості обертання маховиків =6000об/хв.=100об/сек.; швидкості V=6м/сек. примусової перцесії маховиків навколо спільної осі, та при k=0,2 можна отримати значення сили Коріоліса для такої гіродинамічної системи 7 15765 кільцевих маховиків Fk=2*0,2*1кг*2 100рад/сек*6м/сек=1503кгм/сек2=15 00Н (Ньютон) в системі СІ. Комп’ютерна верстка М. Мацело 8 Розрахункові дані підтверджено на експериментальній гіродинамічній системі, що реалізована в відповідності до пропонованого способу компенсації гіромоменту. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of compensation of gyro-moment
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСпособ компенсации гиромомента
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: B64G 1/28, G01C 19/00
Мітки: спосіб, гіромоменту, компенсації
Код посилання
<a href="https://ua.patents.su/4-15765-sposib-kompensaci-giromomentu.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації гіромоменту</a>
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Номер патенту: 49095
Опубліковано: 16.09.2002
Автори: Доценко Борис Іванович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович, Коростельов Олег Петрович, Семенов Леонід Антонович
МПК: F42B 15/01, G05B 11/01
Мітки: компенсації, викривлень, спосіб, ракети, системі, амплітудно-фазових, обертової, керування
Формула / Реферат:
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід...
Спосіб компенсації ефекту доплера

Номер патенту: 63262
Опубліковано: 15.01.2004
Автор: Загорулько Олександр Миколайович
МПК: H04B 7/26
Мітки: компенсації, ефекту, доплера, спосіб
Формула / Реферат:
Спосіб компенсації ефекту Доплера, який відрізняється тим, що за поточними даними про рух об'єкта в Гринвіцькій системі координат, які формуються апаратурою супутникової навігації рухомого об'єкта, та даними про місцезнаходження нерухомого пункту прийому пристрій керування обраховує радіальну швидкість, знак та величину зміни несучої та модуляційної частот та здійснює керування переналагоджувальним синтезатором частот, при цьому передавальним...
Спосіб компенсації реактивної потужності тиристорного асинхронного електропривода вентиляторів в тваринницьких приміщеннях
Номер патенту: 65788
Опубліковано: 15.04.2004
Автори: Зайцев Борис Васильович, Бородін Євген Володимирович, Катюха Анатолій Андрійович
МПК: H02J 3/18
Мітки: спосіб, компенсації, асинхронного, тваринницьких, реактивної, вентиляторів, електропривода, приміщеннях, потужності, тиристорного
Формула / Реферат:
Спосіб компенсації реактивної потужності тиристорного асинхронного електропривода вентиляторів в тваринницьких приміщеннях, що полягає в додатковій генерації її в залежності від температури в приміщенні, зміні напруги живлення асинхронних електродвигунів витяжних вентиляторів, їх обертання і вихідної напруги тахогенератора, яка надходить на вузол порівняння, де сигнал порівнюють із сигналом задатчика, а результуючий сигнал подається на...
Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини і пристрій для його здійснення
Номер патенту: 49958
Опубліковано: 15.10.2002
Автори: Гордієнко Валентин Іванович, Хомченко Олексій Якович, Фролов Леонід Андрійович, Ревякин Леонід Дмитрович, Глущенко Анатолій Романович
МПК: F41G 3/02
Мітки: компенсації, автоматичної, відхілення, спосіб, візування, гармати, бронемашини, прицілу, лінії, здійснення, пристрій
Формула / Реферат:
1. Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини, який полягає в тому, що в канали наведення прицілу за висотою та напрямком вводять компенсаційні сигнали, пропорційні відхиленню лінії візування за висотою та напрямком, в протифазі по відношенню до напрямку руху відхилення, який відрізняється тим, що гармату приводять на певний кут і фіксують її положення на жорсткій опорі, вимикають приводи гармати та...
Спосіб компенсації спотворень підсилювача
Номер патенту: 72936
Опубліковано: 16.05.2005
Автор: Борисов Олександр Олексійович
МПК: H03F 1/02, H03F 3/68, H03F 1/32
Мітки: спосіб, спотворень, компенсації, підсилювача
Формула / Реферат:
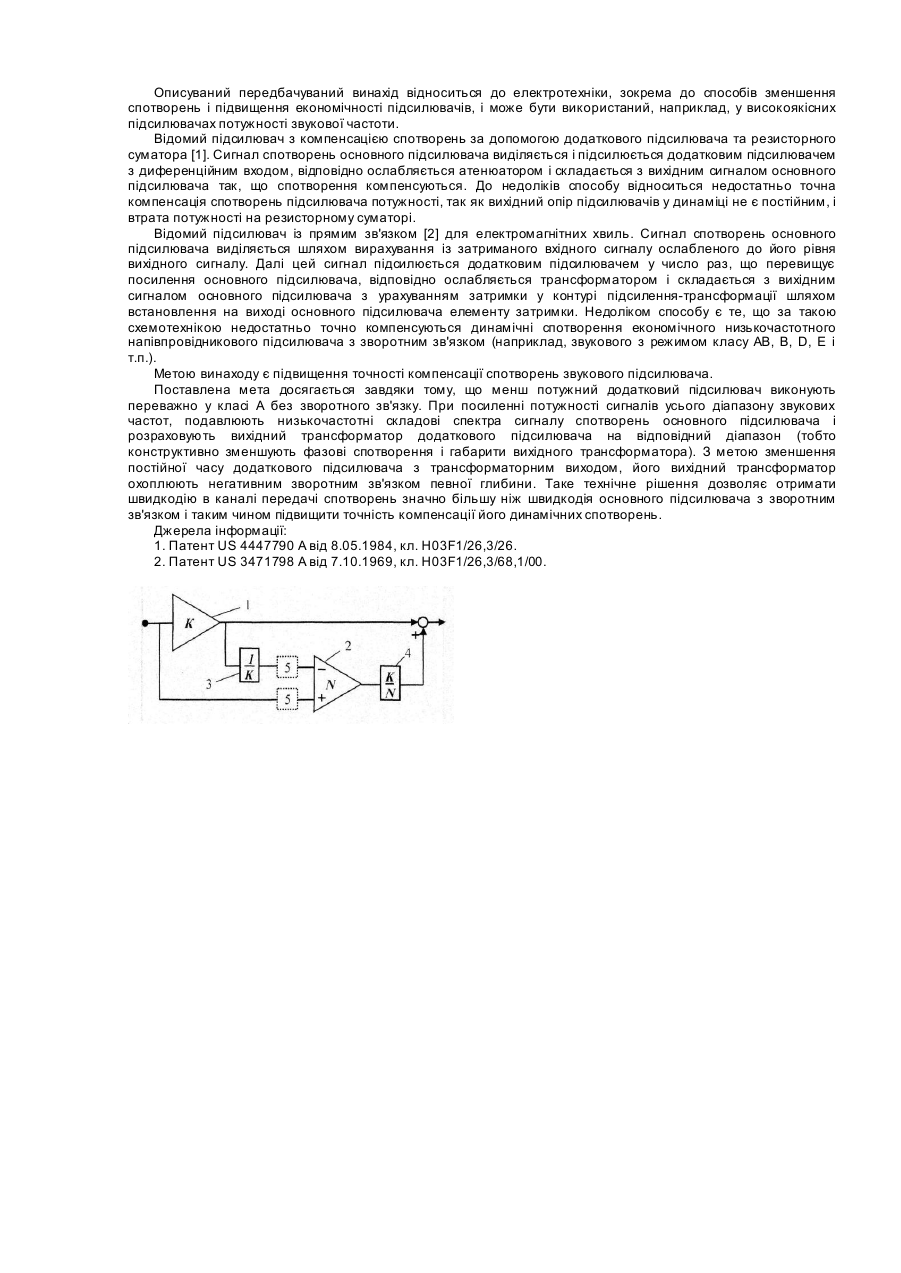
1. Спосіб компенсації спотворень підсилювача, що включає виділення сигналу спотворень основного підсилювача, посилення цього сигналу спотворень додатковим підсилювачем у число раз, що перевищує посилення основного підсилювача, ослаблення вихідним трансформатором або атенюатором у число раз, рівне відношенню коефіцієнта підсилення додаткового підсилювача до коефіцієнта підсилення основного підсилювача, складання з вихідним сигналом основного...
Попередній патент: Роз`єднувальний пристрій для спуску труби-репера
Наступний патент: Гіротурбіна лиховида
Випадковий патент: Комплексний спосіб вторинної фізіопрофілактики загострень бронхітів та захворювань верхніх дихальних шляхів у дітей та підлітків