Спосіб стиснення і відновлення даних відеозображення

Формула / Реферат
1. Спосіб стиснення і відновлення даних відеозображення в послідовностях відеозображень або подібних, які представлені у вигляді послідовності пікселів з двовимірною адресацією асоційованих піксельних даних, причому піксельні дані вибраних кількостей пікселів аналізуються з використанням математичних функцій і стискуються із зменшенням до параметрів їх функцій і після збереження і/або передачі відновлюються з використанням відповідної математичної функції для їх подальшого перетворення, який відрізняється тим, що в первинному аналізі відеоданих відеозображення
визначаються контури структур зображення на основі непослідовних змін в значенні кольору і/або яскравості для суміжних один з одним пікселів,
виконується згладжування і замикання контурів за допомогою інтерполяції,
виявлені таким чином контури описуються в сегментах і за допомогою параметризованої математичної функції і визначаються як об'єкти, причому всі об'єкти, що містять кількість пікселів, меншу від заздалегідь визначеної межі, призначаються фоном,
для індивідуальних об'єктів і для фону векторно визначається колірна перевага і колірна прогресія,
векторно визначаються позиція і протяжність індивідуальних об'єктів,
для індивідуальних об'єктів і для фону визначається структурна функція відповідно до напряму і розміру,
і при подальшому аналізі відеозображень визначаються диференціальні зміни в яскравості, розмірі, позиції і орієнтації об'єктів з урахуванням загальних контурів об'єктів, що примикають один до одного,
визначені таким чином об'єкти і фон спільно з їх оптичними, позиційними і структурними даними, які так отримані, організовуються і забезпечуються в структурованому первинному кадрі або подальшому кадрі,
забезпечені дані первинного кадру і дані подальшого кадру, відповідно, перетворюються на дані пікселя для відновлення і повторної обробки зображення,
з даних первинного кадру з об'єктів визначаються відповідні їм дані позиції контуру в точково-растровому зображенні,
для фону зображення і об'єктів з межами, визначеними, відповідно, на основі даних позиції контуру, точково-растрове представлення заповнюється даними пікселя, відповідними заданій асоційованій структурній функції,
які відтворюються у відповідності до значень колірної переваги і вектора колірної прогресії, а також значення яскравості, і
дані подальшого кадру застосовуються до попереднього точково-растрового представлення для переміщення і/або зміни об'єктів.
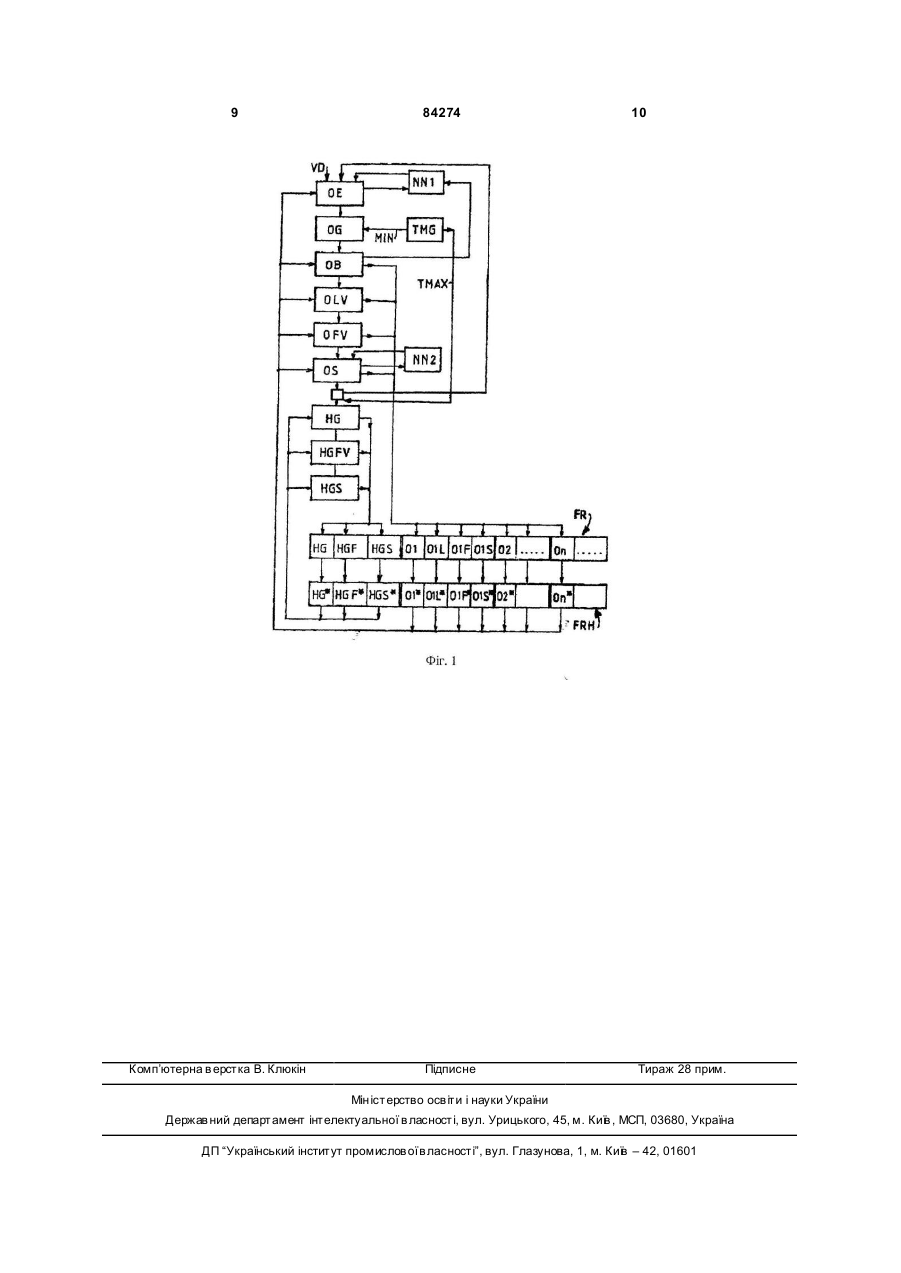
2. Спосіб за п. 1, який відрізняється тим, що описані об'єкти зберігаються з їх математичними функціями в нейронній мережі (NN1), яка служить для подальшого розпізнавання (ОЕ) об'єктів в даних синтезованого зображення (VD).
3. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що структурні функції (OS), які були визначені, зберігаються зі своїми параметрами об'єктів і фону в нейронній мережі (NN2), яка служить як початкова база при подальшому визначенні структурних функцій (OS) з їх параметрами.
4. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що структурна функція (OS) представлена як математична функція, а параметри є цілочисельними величинами, і функція забезпечує необмежену кількість позицій після десятеричної точки.
5. Спосіб за п. 4, який відрізняється тим, що структурною функцією (OS) є дріб, n-ий корінь або трансцендентна функція.
6. Спосіб за п. 4 або 5, який відрізняється тим, що цілочисельні величини є представленими, кодованими як степені простих чисел, а також їх суми або різниці.
7. Спосіб за будь-яким з пп. 4-6, який відрізняється тим, що параметри представлені як числа по модулю 2 в степені 8, і функція виконується з величинами, які представлені як числа по модулю 2 в степені 8, і забезпечує такі величини як позиції після десятеричної точки.
8. Спосіб за будь-яким з пп. 4-7, який відрізняється тим, що індивідуальні структурні функції (OS) визначаються приблизно відповідними послідовності даних пікселів сегмента рядка зображення заздалегідь визначеної довжини або прямокутного сегмента точково-растрового зображення.
9. Спосіб за п. 8, який відрізняється тим, що сегмент рядка має довжину в 64, 128 або 256 байтів, або сегмент точково-растрового зображення має розмір 8 по 8 або 16 по 16 байтів.
10. Спосіб за будь-яким з пп. 8 або 9, який відрізняється тим, що структурна функція (OS) настроюється за допомогою послідовного наближення до послідовності даних пікселя, яка повинна бути приблизно представлена так довго або з такою точністю, як визначається конкретизацією часу (ТМАх) або конкретизацією точності.
11. Спосіб за п. 10, який відрізняється тим, що конкретизація часу або конкретизація точності визначається в залежності від позиції або заданої швидкості зміни позиції заданого об'єкта, причому для об'єктів, що лежать і/або залишаються в центральній частині зображення, призначається більш тривалий час і/або більш висока точність, ніж для об'єктів з краю і/або об'єктів, що відносно швидко переміщуються, і/або для фону.
12. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що ідентифікації і характеризації піддаються тільки такі об'єкти, які мають мінімальну кількість пікселів, і менші об'єкти призначаються фоном.
13. Спосіб за п. 12, який відрізняється тим, що об'єкти обробляються послідовно із зменшенням кількості пікселів доти, поки дозволяє доступний час обчислення, внаслідок чого при кодуванні вмісту зображення визначається мінімальна кількість пікселів об'єктів відповідно до доступного часу обчислення.
Текст
1. Спосіб стиснення і відновлення даних відеозображення в послідовностях відеозображень або подібних, які представлені у вигляді послідовності пікселів з двовимірною адресацією асоційованих піксельних даних, причому піксельні дані вибраних кількостей пікселів аналізуються з використанням математичних функцій і стискуються із зменшенням до параметрів їх функцій і після збереження і/або передачі відновлюються з використанням відповідної математичної функції для їх подальшого перетворення, який відрізняє ться тим, що в первинному аналізі визначаються контури структур зображення на відеоданих відеозображення основі непослідовних змін в значенні кольору і/або яскравості для суміжних один з одним пікселів, виконується згладжування і замикання контурів за допомогою інтерполяції, виявлені таким чином контури описуються в сегментах і за допомогою параметризованої математичної функції і визначаються як об'єкти, причому всі об'єкти, що містять кількість пікселів, меншу від заздалегідь визначеної межі, призначаються фоном, для індивідуальних об'єктів і для фон у векторно визначається колірна перевага і колірна прогресія, векторно визначаються позиція і протяжність індивідуальних об'єктів, для індивідуальних об'єктів і для фону визначається структурна функція відповідно до напряму і розміру, 2 (19) 1 3 84274 4 5. Спосіб за п. 4, який відрізняється тим, що структурною функцією (OS) є дріб, n-ий корінь або трансцендентна функція. 6. Спосіб за п. 4 або 5, який відрізняється тим, що цілочисельні величини є представленими, кодованими як степені простих чисел, а також їх суми або різниці. 7. Спосіб за будь-яким з пп. 4-6, який відрізняється тим, що параметри представлені як числа по модулю 2 в степені 8, і функція виконується з величинами, які представлені як числа по модулю 2 в степені 8, і забезпечує такі величини як позиції після десятеричної точки. 8. Спосіб за будь-яким з пп. 4-7, який відрізняється тим, що індивідуальні структурні функції (OS) визначаються приблизно відповідними послідовності даних пікселів сегмента рядка зображення заздалегідь визначеної довжини або прямокутного сегмента точково-растрового зображення. 9. Спосіб за п. 8, який відрізняється тим, що сегмент рядка має довжину в 64, 128 або 256 байтів, або сегмент точково-растрового зображення має розмір 8 по 8 або 16 по 16 байтів. 10. Спосіб за будь-яким з пп. 8 або 9, який відрізняється тим, що стр уктурна функція (OS) настроюється за допомогою послідовного наближення до послідовності даних пікселя, яка повинна бути приблизно представлена так довго або з такою точністю, як визначається конкретизацією часу (ТМАх) або конкретизацією точності. 11. Спосіб за п. 10, який відрізняється тим, що конкретизація часу або конкретизація точності визначається в залежності від позиції або заданої швидкості зміни позиції заданого об'єкта, причому для об'єктів, що лежать і/або залишаються в центральній частині зображення, призначається більш тривалий час і/або більш висока точність, ніж для об'єктів з краю і/або об'єктів, що відносно швидко переміщуються, і/або для фону. 12. Спосіб за будь-яким з попередніх пп., який відрізняє ться тим, що ідентифікації і характеризації піддаються тільки такі об'єкти, які мають мінімальну кількість пікселів, і менші об'єкти призначаються фоном. 13. Спосіб за п. 12, який відрізняється тим, що об'єкти обробляються послідовно із зменшенням кількості пікселів доти, поки дозволяє доступний час обчислення, внаслідок чого при кодуванні вмісту зображення визначається мінімальна кількість пікселів об'єктів відповідно до доступного часу обчислення. Винахід відноситься до способу стиснення і відновлення даних відеозображення в послідовностях відеозображень або подібних ним, які представлені у вигляді послідовності у кожному випадку пікселів з двовимірною адресацією асоційованих піксельний даних, причому в кожному випадку піксельні дані вибраних кількостей пікселів аналізуються з використанням математичних функцій і стискуються із зменшенням до параметрів їх функцій і після збереження і/або передачі відновлюються з використанням відповідної математичної функції для їх подальшого перетворення. Такі способи стали відомі з стандартів ISO MPEG з MPEGl до MPEG4, JPEG і т.д. В цьому випадку за допомогою диференціального аналізу, аналізу зразків, аналізу Фур'є або подібного аналізу даних кількості пікселів сегментів зображення, так званих елементів мозаїчного зображення, і, зокрема таких даних елемента мозаїчного зображення відносно даних елемента мозаїчного зображення, елемента мозаїчного зображення з ідентичними координатами рядка зображення і координатами стовпця зображення попереднього відеозображення, визначаються параметри функції і, з урахуванням змін в цих послідовностях відеозображень, представляються згідно із затвердженими стандартними форматами кадру. Формати кадру в кожному випадку містять вказівку відповідної функції стиснення, яка в кожному випадку вибирається для більш сильного стиснення вмісту послідовних зображень або елементів мозаїчного зображення в ідентичній позиції в таких зображеннях і параметрів, отриманих при застосуванні функції в кожному випадку. Для відновлення в кожному випадку з кожного кадру береться інформація відносно заданої функції стиснення і відповідно до неї за допомогою відповідної функції і забезпечених параметрів, а також, можливо, даних елемента(ів) мозаїчного зображення щонайменше одного попереднього зображення зберігається початкова кількість пікселів всередині межі допуску. Задачею винаходу є забезпечення істотно більшого стиснення даних-при проходженні даних послідовностей сегментованих зображень в реальному масштабі часу з якістю майже ідентичною якості відомих способів. Рішення задачі полягає в тому, що в первинному аналізі даних зображення відео зображення: - визначаються контури структур зображення на основі непослідовних змін в значенні кольору і/або яскравості у випадку суміжних один з одним пікселів, - виконується згладжування і замикання контурів за допомогою інтерполяції, - виявлені таким чином контури описуються в сегментах і в кожному випадку за допомогою параметризованої математичної функції і визначаються як об'єкти, причому всі об'єкти, що містять кількість пікселів, меншу заздалегідь визначеного порога, призначаються фоном, - для індивідуальних об'єктів і для фону в кожному випадку векторно визначається колірне переважання і колірний розвиток відповідно до напряму і розміру, - в кожному випадку векторно визначаються позиція і протяжність індивідуальних об'єктів, 5 84274 - для індивідуальних об'єктів і для фону в кожному випадку визначається структурна функція, - і у разі подальшого аналізу відеозображень в кожному випадку визначаються диференціальні зміни в яскравості, розмірі, позиції і орієнтації об'єктів з ура хуванням загальних контурів об'єктів, що примикають один до одного, - визначені таким чином об'єкти і фон спільно з їх оптичними, позиційними і структурними даними, які отримані таким чином, організовуються і забезпечуються в структурованому первинному кадрі або подальшому кадрі, - забезпечені дані первинного кадру і дані подальшого кадру, відповідно, перетворюються в дані пікселя для відновлення і повторної обробки зображення, - з даних первинного кадру з об'єктів визначаються відповідні ним дані позиції контура в точково-растровому зображенні, для фону зображення і об'єктів з межами, визначеними, відповідно, на основі даних позиції контура, точково-растрове представлення заповнюється даними пікселя, відповідними заданій асоційованій структурній функції, - які відтворюються у відповідності до значення колірного переважання і вектору колірного розвитку, а також значення яскравості, і - дані подальшого кадру застосовуються в кожному випадку до попереднього точковорастрового представлення для переміщення і/або зміни об'єктів. Переважні варіанти здійснення визначені в залежних пунктах формули винаходу. Визначення і опис об'єктів на основі їх контурів і структур приводить до надзвичайно сильного стиснення даних в порівнянні з стандартними способами, в яких в кожному випадку обробляються окремі прямокутні сегменти без виявлення і використання графічних з'єднань більшого розміру. Для прискорення процесу на окремих етапах процесу додатково застосовуються переважні нові способи, які також можуть розглядатися як незалежні винаходи. Основуючись на інформації про те, що багато які об'єкти подібні до інших в термінах їх основної структури, і їх спорідненості з іншими, наприклад, відносно людини, наявності голови, рук, верхньої частини тулуба, нижньої частини тулуба, ніг і т.д. об'єкти, які одного разу були розпізнані і охарактеризовані в термінах функції, зберігаються на основі їх даних в нейронній мережі, призначеній для даних контура відповідних об'єктів і інших, так що в кожному випадку для виявленого об'єкта об'єкти, які звичайно примикають до нього, пізніше можуть бути розташовані безпосередньо і використані для полегшення визначення контура.Також можна взяти компіляцію описів математичних функцій різних об'єктів з нейронної мережі, яка повинна бути позначена тільки відповідними поточними параметрами, такими як радіус, вектор в середній точці, координати початку і кінця і т.д. Також структурна функція об'єкта часто ідентична або близька до структурної функції аналогічних об'єктів, так що вона може служити як перше 6 наближення при її зберіганні в нейронній мережі і витяганні звідти. Переважно дуже сильне стиснення досягається при використанні інформації про те, що піксельні дані рядки пікселів в кожному випадку є рядом чисел, який може бути представлений елементарними арифметичними операціями, що виконуються над натуральними числами. Зокрема ділення і витягання кореня n-ного ступеня є простими операціями, які дають більш або менш добре наближення для піксельних даних рядка. Потім представлення рядка стискується в кодоване указания функції і числові дані, які переважно представлені у вигляді суми або різниць степенів простого числа. Кожний такий опис структури, який вже був розміщений для послідовності піксельний даних, переважно зберігається в нейронній мережі, так що він може використовуватися безпосередньо там або викликатися як перше наближення, коли пізніше має місце аналогічна послідовність піксельних даних. Оскільки функції, які будуть використовуватися, є елементарними і можуть виконуватися стандартними комп'ютерами з високою швидкістю як операції з фіксованою точкою, дані пікселя можуть генеруватися з даних стр уктури під час виконання відтворення зображення, відновлення стиснених даних не є проблематичним. Переважно в термінах точності для сумісності відхилень стиснення даних зображення під час виконання настроюється на окремих його етапах. При визначенні даних контура, згладжування і т.д. більша увага приділяється високій розрізнювальній здатності об'єктів переднього плану, що переміщаються, ніж задньому плану і пасивним об'єктам, оскільки в кожному випадку обробці об'єктів відповідають різні максимальні часи обчислення. Додатково для вільного часу обчислення, що залишається, в кожному випадку настроюється мінімальна кількість пікселів, для яких визначається об'єкт. Спочатку обробляються найбільші об'єкти, і де ще залишається час обчислення для часу зображення, з фону виділяються менші об'єкти, детально описуються геометрично і структурно і розміщуються в кадрі. Для визначення структурної функції об'єкта в кожному випадку переважно конкретизується максимальний час, причому використовується інформація про те, що відхилення окремих даних елемента інформації, якщо вони не виникають в сусідніх одна одній групах, не приводять до якогонебудь помітного погіршення якості зображення, оскільки структура залежить тільки від загального вигляду поверхні об'єкта, але не від яких-небудь деталей зображення. Для ілюстрації як можливий варіант структурної "функції розглядається наступне: х-ий корінь зав степені m +/- b в степені п, ділене на с в степені р +/- d в степені q; х=ціле число 1-3; a, b, с, d=прості числа до 17; m, n, p, q=цілі числа 1-9. Як кількість пікселів, яку потрібно проаналізувати, береться, наприклад, 256 пікселів у кожному 7 84274 випадку сегмента рядка зображення або сегмент 8x8 або 16 х 16 точково-растрового зображення. Дані пікселя звичайно кодуються у 8-біт. Відповідно, виконуються операції не десятеричні або шістнадцятеричні, а по модулю 256, так що початкові дані, як дані кодування і відновлені цільові дані завжди представлені безпосередньо у вигляді 8бітових даних пікселя. Якщо аналізуються декілька рядкових сегментів рядка зображення або послідовні рядки зображення, відповідне рішення часто виникає дуже просто і економічно за часом з продовження і/або переміщення на декілька позицій структурної функції, що застосовується раніше. Замість нової структурної функції вказується зміна в асоційованому кадрі. Фіг.1 зображає блок-схему кодування зображення. Дані зображення (VD) поступово піддаються різним етапам процесу. Спочатку здійснюється розпізнавання об'єктів OE, причому як допоміжна інформація використовуються об'єкти 01*, 02*, які були розпізнані в зображенні раніше, а також об'єкти, які зберігаються в першій нейронній мережі NNl. Розпізнані об'єкти піддаються згладжуванню об'єктів OG з певною межею розрізнювальної здатності MIN. Згладжені об'єкти піддаються опису об'єктів з урахуванням відносин меж сусідів, так що об'єкти 01, 02 і т.д. зберігаються функціонально в кадрі FR. Для індивідуальних об'єктів здійснюється встановлення OLV векторів положення і напряму OL1, OL2 і т.д., а також опис кольору OFV за допомогою векторів кольору і векторів колірного розвитку OF1, ОF2 і т.д. Додатково для об'єктів 01, 02 і т.д. визначаються структурні функції і їх параметри OS1, ОS2 і т.д. переважно з використанням другої нейронної мережі NN2 і розміщуються в кадрі FR також, як позиційні вектори і вектори кольору. Якщо всі об'єкти записані в кадрі, визначаються вектори кольору HGF і структури фону HGS з фону HG і розміщуються в кадрі FR. Потім повний 8 кадр FR зображення забезпечується як статистичний кадр FRH, вміст якого, помічений в кожному випадку посилальними позиціями із зірочкою, стає доступним у вигляді вихідного матеріалу для кодування наступного зображення. Якщо виявлені тільки незначні зміни кольору, позиції, структури або орієнтацій об'єкта, то в наступному кадрі вказуються тільки зміни, що приводить до істотної економії часу обробки, місткості пам'яті і об'єму передачі. Задані описи об'єктів, їх відносини сусідства, а також структурні функції постачаються в базові компоненти нейронних мереж NN1, NN2, щоб аналогічні об'єкти і структури були розміщені і використовувалися при кодуванні нових зображень. У кожному випадку через пристрій управління часом TMG здійснюється моніторинг часу кодування, який утримується в межах за допомогою відповідних конкретизації мінімальної розрізнювальної здатності MIN і максимального часу TMAx структурного аналізу. Альтернативно, обчислення структурної функції, як описано вище, може бути виконане також переважно шістнадцятеричними операціями, для яких звичайна 8-бітова інформація пікселя розділяється на два 4-бітових символи, і, відповідно, обчислюється і перевіряється подвійне число позицій для можливо більшої адекватності. Відповідно, функції і параметри, зокрема в зв'язку з цим, також кодуються як шістнадцятеричні числа і упаковуються в кадр попарно в 8-бітових байтах. У залежності від вказаної функції потрібно указати більшу або меншу кількість параметрів. Дуже висока щільність упаковки в кадрі може бути досягнута, якщо в байті в кожному випадку зберігається три біти для восьми функцій, три біти для восьми перших простих чисел і два біти для їх експонента з 1-4. Наприклад, у вигляді елементів функції можуть кодуватися чотири фундаментальних операції, функція витягання кореня і степенева функція, а також круглі дужки формули. Для функцій, взятих в дужки, в інших 5 бітах байта можуть бути вказані додаткові спеціальні функції, такі як ознака кінця формули або комплексні функції. 9 Комп’ютерна в ерстка В. Клюкін 84274 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for compressing and decompressing video images data
Автори англійськоюProkhnov Uve
Назва патенту російськоюСпособ сжатия и восстановления данных видеоизображения
Автори російськоюПрохнов Уве
МПК / Мітки
МПК: H04N 7/26, H04N 11/04, H04N 7/36
Мітки: відновлення, стиснення, даних, відеозображення, спосіб
Код посилання
<a href="https://ua.patents.su/5-84274-sposib-stisnennya-i-vidnovlennya-danikh-videozobrazhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб стиснення і відновлення даних відеозображення</a>
Спосіб стиснення даних
Номер патенту: 57784
Опубліковано: 15.07.2003
Автор: Хейл Іра Д.
МПК: H04N 7/30, G06T 9/00, H04N 1/41, H03M 7/40, H03M 7/30
Мітки: стиснення, спосіб, даних
Формула / Реферат:
1. Спосіб стиснення одновимірного масиву х з N вибірок сейсмічних сигналів, який відрізняється тим, що включає стадії:а) розділення зазначеного масиву х на блоки з М вибірок, де М < N,б) згортання вибірок по кожній межі блока I згідно зв) трансформації згорнених...
Спосіб стиснення даних під час передачі та/або накопичення цифрових звукових сигналів, що надходять з кількох залежних один від одного каналів
Номер патенту: 34457
Опубліковано: 15.03.2001
Автори: Еберлайн Ернст, Бранденбург Карл-Хайнц, Зайтцер Дітер, Херрє Юргєн
МПК: G10L 19/00, H03M 7/30, H04H 5/00
Мітки: даних, накопичення, передачі, цифрових, одного, залежних, стиснення, кількох, каналів, надходять, сигналів, звукових, спосіб
Текст:
...в канапе сигнала Поэтому, например, громкий сигнал саксофона, который присутствует практически только в правом канале, создает в левом канале помехи, которые не маскируются и поэтому четко воспринимаются. При использовании интенсивного метода стереокодирования нарушае тся пространственный эффект звучания, если сигналы левого и правого канала имеют сильно отличающийся спектральный состав Известные способы применяются, таким образом, только...
Спосіб придбання електронних даних із застосуванням носія даних і відповідний носій даних
Номер патенту: 55556
Опубліковано: 15.04.2003
Автор: Борн Крістіне
МПК: G07F 7/08, G07F 19/00, G07F 17/00
Мітки: спосіб, носій, відповідний, даних, електронних, придбання, носія, застосуванням
Формула / Реферат:
1. Спосіб придбання електронних даних (D2) із застосуванням носія (1) даних, що містить процесор (2) і запам'ятовуючий пристрій (М1), згідно з яким:- встановлюють зв'язок між носієм (1) даних і розрахунковим пристроєм (3),- передають між процесором (2) носія (1) даних і розрахунковим пристроєм (3) інформацію (D1) стосовно операції оплати, яка має бути здійснена у зв'язку з придбанням даних (D2), внаслідок чого перераховується...
Спосіб керування доступом станції даних до мобільних носіїв даних, мобільний носій даних, станція даних і система для здійснення способу
Номер патенту: 46781
Опубліковано: 17.06.2002
Автор: Райнер Роберт
МПК: G06K 19/07, G06K 17/00, H04L 12/407, G06K 7/00
Мітки: носій, спосіб, доступом, мобільній, носіїв, керування, здійснення, даних, способу, станція, мобільних, система, станції
Формула / Реферат:
1. Спосіб керування доступом станції даних (61) до щонайменше двох мобільних носіїв даних (51), при якому ці носії даних на вимогу станції даних синхронно передають свої ідентифікаційні номери, і станція даних визначає, чи приймаються щонайменше в одному двійковому розряді прийнятих ідентифікаційних номерів два різних значення біта, і потім, якщо принаймні в одному двійковому розряді прийнятих ідентифікаційних номерів будуть визначені як...
Записний носій даних із областю захищених даних, спосіб записування на нього та пристрої для записування/відтворення даних
Номер патенту: 76094
Опубліковано: 17.07.2006
Автори: Тальстра Йохан К., Калкер Антоніус А.С.М., Ліннарц Йохан П.М.Г.
МПК: G11B 20/00
Мітки: пристрої, носій, записний, нього, областю, даних, спосіб, захищених, записування
Формула / Реферат:
1. Спосіб записування даних на перезаписний носій даних, що має доступну тільки для читання область незмінних даних і записну область даних, в якому в згадану записну область даних записують системні дані, і який відрізняється тим, що генерують криптографічну контрольну суму згаданих системних даних і записують її в згадану область незмінних даних, де згадана криптографічна контрольна сума використовується для перевірки згаданих системних...
Попередній патент: Авіаційна бомба для розпилення та активації речовини
Наступний патент: 8-[3-амінопіперидин-1-іл]ксантини, спосіб їх одержання та їх застосування як лікарських засобів
Випадковий патент: Спосіб прогнозування ефективності лікування неплідності у жінок