Фрикційно-механічний інтегратор двох незалежних параметрів
Номер патенту: 85307
Опубліковано: 11.11.2013
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович

Формула / Реферат
Фрикційно-механічний інтегратор двох незалежних перемінних, що містить корпус з установленим в ньому з можливістю обертатися підпружиненим диском, плоский циліндричний ролик з механізмом переміщення, фрикційно взаємодіючий з диском, і перший інтегратор з лічильником, який відрізняється тим, що в ньому додатково установлений другий інтегратор з лічильником і другий ролик з механізмом переміщення, взаємодіючий з диском, причому ролики виконані сферичними зрізаними з двох боків конусними, протилежно розміщеними заглибленнями і установлені на сферичні осі, а механізми переміщення роликів виконані у вигляді тяг, одними кінцями зв'язаних із сферичними осями, і додатково установлені перший і другий шліцьові вали із зубчастими передачами, причому одні із коліс яких з'єднані з першим і другим лічильниками інтеграторів, а другі колеса посаджені на перший і другий шліцьові вали, з обмеженим вздовж осі ходом, і обладнані шліцьовими втулками, з можливістю обертатися і переміщатися вздовж осей валів і фрикційно взаємодіяти із сферичними роликами, причому тяги механізмів переміщення розміщені в корпусі над підпружиненим диском, а їх другі кінці зв'язані через додатково установлені двоплечі важелі з тягами механізмів введення в інтегратори сигналів залежних перемінних.
Текст
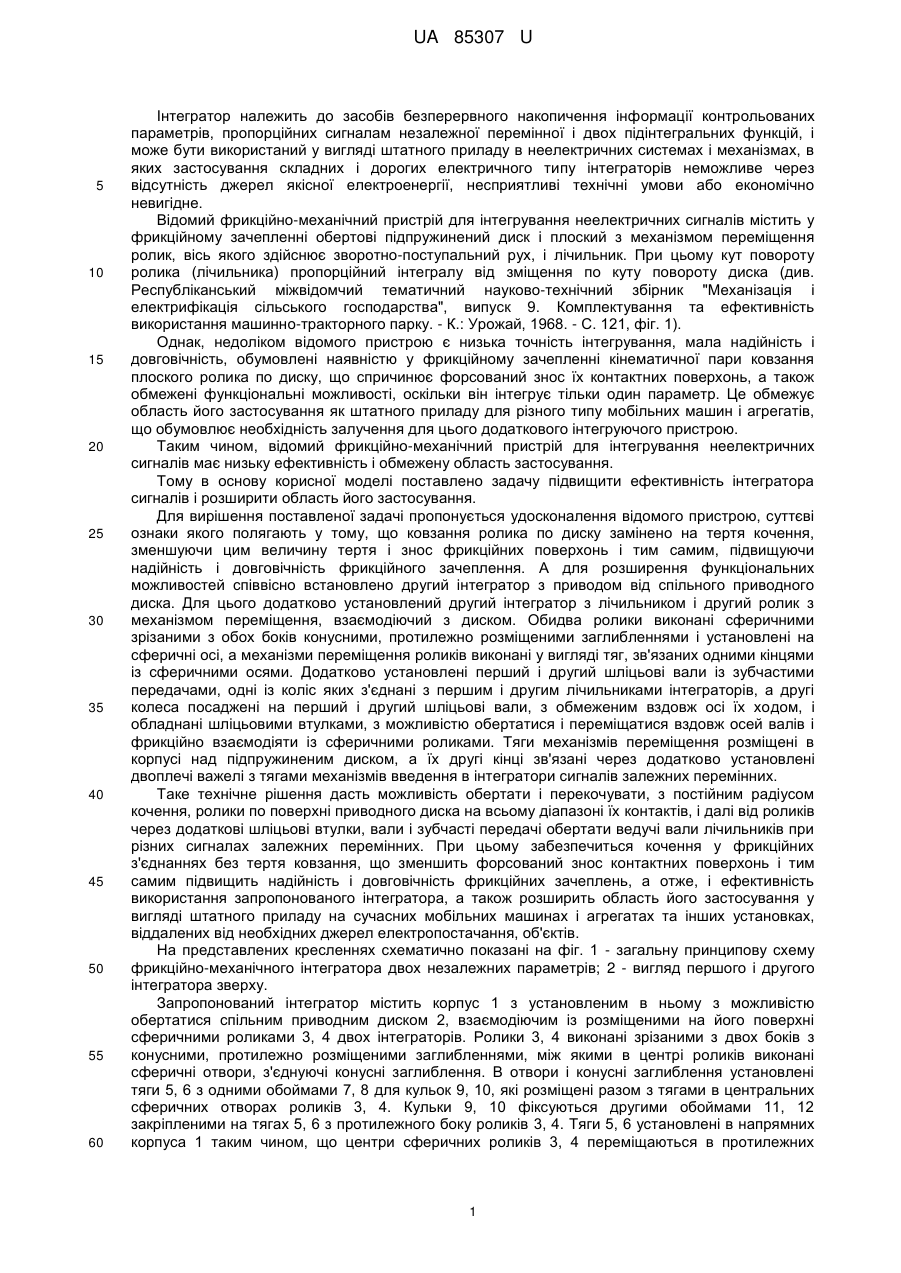
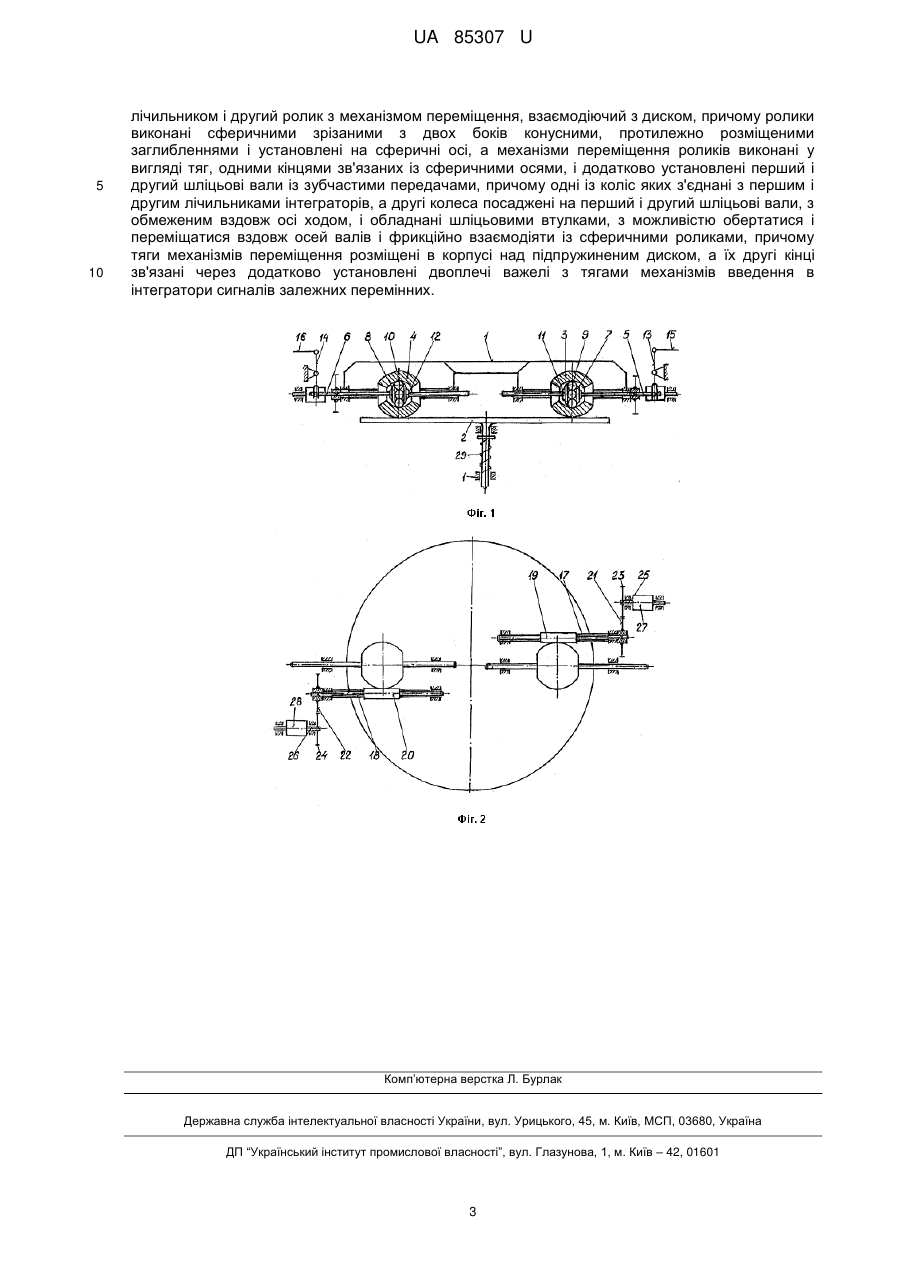
Реферат: Фрикційно-механічний інтегратор двох незалежних перемінних містить корпус з установленим в ньому з можливістю обертатися підпружиненим диском, плоский циліндричний ролик з механізмом переміщення, фрикційно взаємодіючий з диском і перший інтегратор з лічильником. Крім цього, в ньому додатково установлений другий інтегратор з лічильником і другий ролик з механізмом переміщення, взаємодіючий з диском, причому ролики виконані сферичними зрізаними з двох боків конусними, протилежно розміщеними заглибленнями і установлені на сферичні осі, а механізми переміщення роликів виконані у вигляді тяг, одними кінцями зв'язаних із сферичними осями, і додатково установлені перший і другий шліцьові вали із зубчастими передачами, причому одні із коліс яких з'єднані з першим і другим лічильниками інтеграторів, а другі колеса посаджені на перший і другий шліцьові вали, з обмеженим вздовж осі ходом, і обладнані шліцьовими втулками, з можливістю обертатися і переміщатися вздовж осей валів і фрикційно взаємодіяти із сферичними роликами, причому тяги механізмів переміщення розміщені в корпусі над підпружиненим диском. UA 85307 U (54) ФРИКЦІЙНО-МЕХАНІЧНИЙ ІНТЕГРАТОР ДВОХ НЕЗАЛЕЖНИХ ПАРАМЕТРІВ UA 85307 U UA 85307 U 5 10 15 20 25 30 35 40 45 50 55 60 Інтегратор належить до засобів безперервного накопичення інформації контрольованих параметрів, пропорційних сигналам незалежної перемінної і двох підінтегральних функцій, і може бути використаний у вигляді штатного приладу в неелектричних системах і механізмах, в яких застосування складних і дорогих електричного типу інтеграторів неможливе через відсутність джерел якісної електроенергії, несприятливі технічні умови або економічно невигідне. Відомий фрикційно-механічний пристрій для інтегрування неелектричних сигналів містить у фрикційному зачепленні обертові підпружинений диск і плоский з механізмом переміщення ролик, вісь якого здійснює зворотно-поступальний рух, і лічильник. При цьому кут повороту ролика (лічильника) пропорційний інтегралу від зміщення по куту повороту диска (див. Республіканський міжвідомчий тематичний науково-технічний збірник "Механізація і електрифікація сільського господарства", випуск 9. Комплектування та ефективність використання машинно-тракторного парку. - К.: Урожай, 1968. - С. 121, фіг. 1). Однак, недоліком відомого пристрою є низька точність інтегрування, мала надійність і довговічність, обумовлені наявністю у фрикційному зачепленні кінематичної пари ковзання плоского ролика по диску, що спричинює форсований знос їх контактних поверхонь, а також обмежені функціональні можливості, оскільки він інтегрує тільки один параметр. Це обмежує область його застосування як штатного приладу для різного типу мобільних машин і агрегатів, що обумовлює необхідність залучення для цього додаткового інтегруючого пристрою. Таким чином, відомий фрикційно-механічний пристрій для інтегрування неелектричних сигналів має низьку ефективність і обмежену область застосування. Тому в основу корисної моделі поставлено задачу підвищити ефективність інтегратора сигналів і розширити область його застосування. Для вирішення поставленої задачі пропонується удосконалення відомого пристрою, суттєві ознаки якого полягають у тому, що ковзання ролика по диску замінено на тертя кочення, зменшуючи цим величину тертя і знос фрикційних поверхонь і тим самим, підвищуючи надійність і довговічність фрикційного зачеплення. А для розширення функціональних можливостей співвісно встановлено другий інтегратор з приводом від спільного приводного диска. Для цього додатково установлений другий інтегратор з лічильником і другий ролик з механізмом переміщення, взаємодіючий з диском. Обидва ролики виконані сферичними зрізаними з обох боків конусними, протилежно розміщеними заглибленнями і установлені на сферичні осі, а механізми переміщення роликів виконані у вигляді тяг, зв'язаних одними кінцями із сферичними осями. Додатково установлені перший і другий шліцьові вали із зубчастими передачами, одні із коліс яких з'єднані з першим і другим лічильниками інтеграторів, а другі колеса посаджені на перший і другий шліцьові вали, з обмеженим вздовж осі їх ходом, і обладнані шліцьовими втулками, з можливістю обертатися і переміщатися вздовж осей валів і фрикційно взаємодіяти із сферичними роликами. Тяги механізмів переміщення розміщені в корпусі над підпружиненим диском, а їх другі кінці зв'язані через додатково установлені двоплечі важелі з тягами механізмів введення в інтегратори сигналів залежних перемінних. Таке технічне рішення дасть можливість обертати і перекочувати, з постійним радіусом кочення, ролики по поверхні приводного диска на всьому діапазоні їх контактів, і далі від роликів через додаткові шліцьові втулки, вали і зубчасті передачі обертати ведучі вали лічильників при різних сигналах залежних перемінних. При цьому забезпечиться кочення у фрикційних з'єднаннях без тертя ковзання, що зменшить форсований знос контактних поверхонь і тим самим підвищить надійність і довговічність фрикційних зачеплень, а отже, і ефективність використання запропонованого інтегратора, а також розширить область його застосування у вигляді штатного приладу на сучасних мобільних машинах і агрегатах та інших установках, віддалених від необхідних джерел електропостачання, об'єктів. На представлених кресленнях схематично показані на фіг. 1 - загальну принципову схему фрикційно-механічного інтегратора двох незалежних параметрів; 2 - вигляд першого і другого інтегратора зверху. Запропонований інтегратор містить корпус 1 з установленим в ньому з можливістю обертатися спільним приводним диском 2, взаємодіючим із розміщеними на його поверхні сферичними роликами 3, 4 двох інтеграторів. Ролики 3, 4 виконані зрізаними з двох боків з конусними, протилежно розміщеними заглибленнями, між якими в центрі роликів виконані сферичні отвори, з'єднуючі конусні заглиблення. В отвори і конусні заглиблення установлені тяги 5, 6 з одними обоймами 7, 8 для кульок 9, 10, які розміщені разом з тягами в центральних сферичних отворах роликів 3, 4. Кульки 9, 10 фіксуються другими обоймами 11, 12 закріпленими на тягах 5, 6 з протилежного боку роликів 3, 4. Тяги 5, 6 установлені в напрямних корпуса 1 таким чином, що центри сферичних роликів 3, 4 переміщаються в протилежних 1 UA 85307 U 5 10 15 20 25 30 35 40 45 50 55 60 напрямках паралельно площині обертання диска 2. До тяг 5, 6 одними кінцями приєднані двоплечі важелі 13, 14, шарнірно закріплені на корпусі 1, протилежні кінці яких з'єднані з тягами 15, 16 механізмів введення в інтегратори сигналів залежних перемінних. Паралельно тягам 5, 6 на упорах розміщені шліцьові вали 17, 18 з обмеженим вздовж осей ходом. На валах 17, 18 вільно, з можливістю обертатися і переміщатися вздовж осей, посаджені на шліцьові втулки 19, 20, що знаходяться в постійному фрикційному зачепленні з роликами 3, 4, а також жорстко установлені зубчасті колеса 21, 22 з обмеженим вздовж осі ходом, які в постійному зачепленні із зубчастими колесами 23, 24, жорстко закріплені на валах 25, 26 лічильників 27, 28. Для запобігання ковзання роликів 3, 4 відносно диска 2 використана пружина 29, яка постійно притискає диск до роликів. Фрикційно-механічний інтегратор працює наступним чином. При постійній частоті обертання диска 2 від первинного джерела механічної енергії мобільної машини чи агрегату забезпечується введення в інтегратори сигналів незалежних перемінних. В результаті фрикційного зачеплення обертається сферичний ролик 3, який завдяки також фрикційному зачепленню обертає шліцьову втулку 19, а через неї, шліцьовий вал 17, зубчасті колеса 21, 23 і вал 25 лічильника 27 першого інтегратора. Сигнал залежної перемінної в перший інтегратор вводиться зміщенням тяги 5, яка завдяки сферичному зв'язку викликає переміщення ролика 3, який, перекочуючись по диску 2, змінює на ньому радіус бігової доріжки фрикційного зачеплення. При цьому радіус ролика 3, на всьому діапазоні змінювання радіуса диска 2, буде постійним. Останнє забезпечується паралельним площині диска 2 переміщенням тяги 5, а отже, осі обертання ролика 3. Від ролика 3 обертання до лічильника 27 передається через шліцьову втулку 19, яка при його перекочуванні переміщається і разом з ним обертається в постійному з'єднанні зі шліцьовим валом 17 при будь-якому положенні ролика 3 і обертає зубчасте колесо 21, а від нього через зубчасте колесо 23 - вал 25 лічильника. У випадку привода другого інтегратора 28 диск 2 обертається від джерела енергії з тією ж частотою обертання. Завдяки фрикційному зачепленню з диском 2 обертається сферичний ролик 4, який завдяки також фрикційному зачепленню обертає шліцьову втулку 20, а через неї, шліцьовий вал 18, зубчасті колеса 22, 24 і вал 26 - лічильник 28 другого інтегратора. Як і в приводі першого інтегратора, сигнал залежної перемінної вводиться іншим за величиною зміщенням вже тяги 6, яка завдяки сферичному зв'язку викликає переміщення ролика 4, який, переміщуючись по диску 2, змінює на ньому радіус бігової доріжки фрикційного зачеплення. І в цьому випадку радіус ролика 4, на всьому діапазоні змінювання радіуса бігової доріжки диска 2, буде постійним, завдяки паралельному площині диска переміщенню тяги 6, а отже, осі обертання ролика. Лічильник 28 одержить обертання від ролика 4 через шліцьову втулку 20, яка при його перекочуванні переміщується і разом з ним обертається в постійному з'єднанні зі шліцьовим валом 18 при будь-якому положенні ролика і далі через зубчасті колеса 22, 24 обертає його ведучий вал 26 з іншою від лічильника 27 частотою. Таким чином, подача на вхід інтеграторів спільного сигналу незалежної перемінної, у вигляді кута повороту диска 2, обертаючого ролики 3, 4, і сигналів, першої і другої залежних перемінних, у вигляді зміщення тяг 5, 6, викликаючих перекочування обертових роликів по диску, забезпечує на виході першого інтегратора кут повороту вала 25 лічильника 27, а на виході другого інтегратора - кут повороту вала 26 лічильника 28, які пропорційні інтегралам від зміщення по куту повороту привідного диска 2. Застосування запропонованого фрикційно-механічного інтегратора, у порівнянні з відомим, дасть можливість, шляхом заміни у фрикційному зачепленні кінематичної пари ковзання на кочення, усунути форсований знос контактних поверхонь роликів і дисків і тим самим підвищить точність функціонування інтеграторів, а також їх надійність і довговічність. При цьому розширяться функціональні можливості незалежного інтегрування одночасно двох сигналів при спрощеній конструкції, що розширить його область застосування як штатного приладу на сучасних мобільних машинах і агрегатах, а також установках, віддалених від джерел якісного електропостачання, об'єктів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Фрикційно-механічний інтегратор двох незалежних перемінних, що містить корпус з установленим в ньому з можливістю обертатися підпружиненим диском, плоский циліндричний ролик з механізмом переміщення, фрикційно взаємодіючий з диском, і перший інтегратор з лічильником, який відрізняється тим, що в ньому додатково установлений другий інтегратор з 2 UA 85307 U 5 10 лічильником і другий ролик з механізмом переміщення, взаємодіючий з диском, причому ролики виконані сферичними зрізаними з двох боків конусними, протилежно розміщеними заглибленнями і установлені на сферичні осі, а механізми переміщення роликів виконані у вигляді тяг, одними кінцями зв'язаних із сферичними осями, і додатково установлені перший і другий шліцьові вали із зубчастими передачами, причому одні із коліс яких з'єднані з першим і другим лічильниками інтеграторів, а другі колеса посаджені на перший і другий шліцьові вали, з обмеженим вздовж осі ходом, і обладнані шліцьовими втулками, з можливістю обертатися і переміщатися вздовж осей валів і фрикційно взаємодіяти із сферичними роликами, причому тяги механізмів переміщення розміщені в корпусі над підпружиненим диском, а їх другі кінці зв'язані через додатково установлені двоплечі важелі з тягами механізмів введення в інтегратори сигналів залежних перемінних. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюPonedilok Vadym Vitaliiovych
Автори російськоюПонедилок Вадим Витальевич
МПК / Мітки
МПК: G06G 3/00
Мітки: незалежних, інтегратор, фрикційно-механічний, двох, параметрів
Код посилання
<a href="https://ua.patents.su/5-85307-frikcijjno-mekhanichnijj-integrator-dvokh-nezalezhnikh-parametriv.html" target="_blank" rel="follow" title="База патентів України">Фрикційно-механічний інтегратор двох незалежних параметрів</a>
Комбінований фрикційно-механічний інтегратор неелектричних сигналів
Номер патенту: 80122
Опубліковано: 13.05.2013
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: G06G 3/00
Мітки: комбінований, інтегратор, сигналів, неелектричних, фрикційно-механічний
Формула / Реферат:
Комбінований фрикційно-механічний інтегратор неелектричних сигналів, що містить корпус з установленим в ньому з можливістю обертатися підпружиненим диском, плоский циліндричний ролик з механізмом переміщення, фрикційно взаємодіючий з диском, і перший інтегратор з лічильником, який відрізняється тим, що в ньому додатково встановлено другий інтегратор з лічильником, підпружиненим диском, кінематично зв'язаним через зубчасті передачі з диском...
Фрикційно-механічний накопичувач інформації контрольованих параметрів
Номер патенту: 76233
Опубліковано: 25.12.2012
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: G06G 3/00
Мітки: фрикційно-механічний, контрольованих, параметрів, інформації, накопичувач
Формула / Реферат:
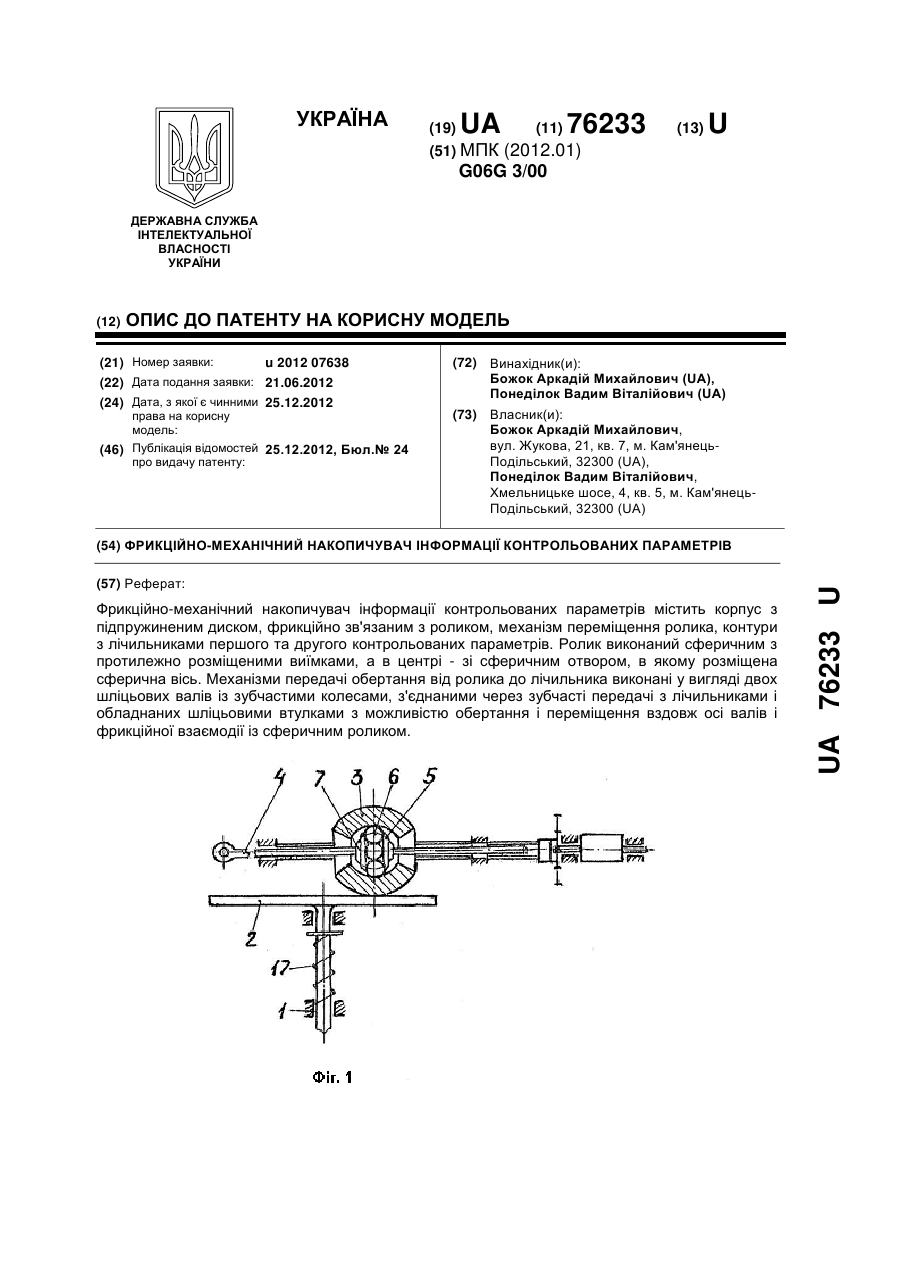
Фрикційно-механічний накопичувач інформації контрольованих параметрів, що містить корпус з установленим у ньому з можливістю обертання підпружиненим диском, фрикційно зв'язаним з плоским роликом, механізм переміщення ролика, з'єднаний з роликом, і контур з лічильником першого контрольованого параметра, який відрізняється тим, що в ньому ролик виконаний сферичним з протилежно розміщеними виїмками, а в центрі - зі сферичним отвором, який...
Інтегратор сигналів
Номер патенту: 63524
Опубліковано: 10.10.2011
Автор: Божок Аркадій Михайлович
МПК: G06G 3/00
Мітки: сигналів, інтегратор
Формула / Реферат:
Інтегратор сигналів, що містить корпус з установленим в ньому, з можливістю обертання, підпружиненим диском, фрикційно зв'язаним з плоским роликом, з'єднаний з роликом механізм переміщення ролика і лічильник, який відрізняється тим, що ролик виконаний сферичним з протилежно розміщеними конусними виїмками, а в центрі - із сферичним отвором, з'єднуючим конусоподібні виїмки, в якому розміщена сферична вісь, зв'язана з двома півосями механізму...
Фрикційний інтегратор сигналів
Номер патенту: 72305
Опубліковано: 10.08.2012
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: G06G 3/00
Мітки: сигналів, інтегратор, фрикційний
Формула / Реферат:
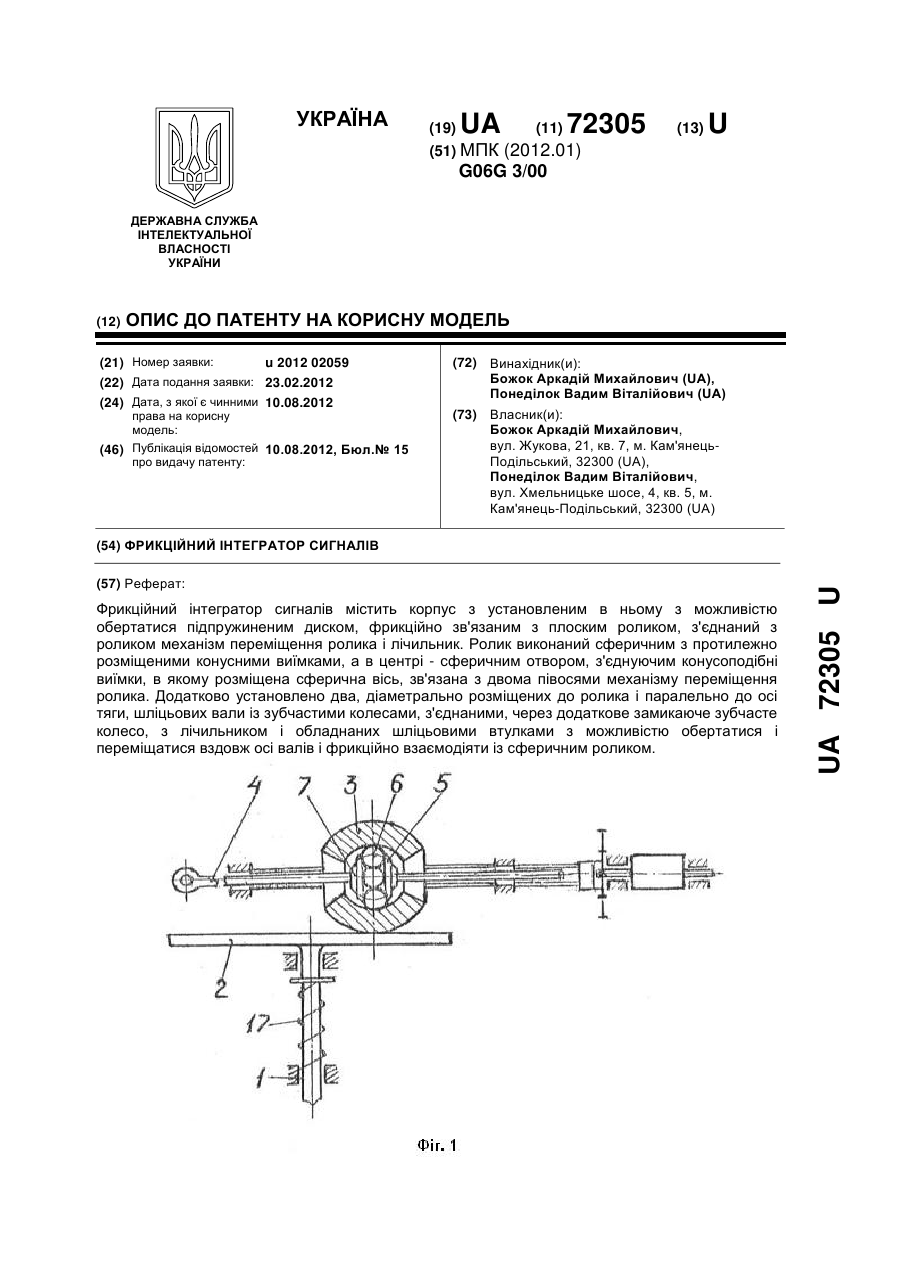
Фрикційний інтегратор сигналів, що містить корпус з установленим в ньому з можливістю обертатися підпружиненим диском, фрикційно зв'язаним з плоским роликом, з'єднаний з роликом механізм переміщення ролика і лічильник, який відрізняється тим, що в ньому ролик виконаний сферичним з протилежно розміщеними конусними виїмками, а в центрі - сферичним отвором, з'єднуючим конусоподібні виїмки, в якому розміщена сферична вісь, зв'язана з двома...
Комбінований фрикційний варіатор
Номер патенту: 75273
Опубліковано: 26.11.2012
Автори: Мельник Василь Андрійович, Божок Аркадій Михайлович
МПК: F16D 3/00
Мітки: фрикційний, комбінований, варіатор
Формула / Реферат:
1. Комбінований фрикційний варіатор, що містить корпус з установленими в ньому з можливістю обертання першим підпружненим диском, циліндричним роликом з механізмом переміщення, взаємодіючим з диском, і перший приводний агрегат, який відрізняється тим, що додатково має другий приводний агрегат, другий підпружинений диск, кінематично через зубчасті передачі зв'язаний з першим диском, і другий ролик з механізмом переміщення, причому ролики...
Попередній патент: Гепатопротекторний засіб на основі природних фосфоліпідів
Наступний патент: Трикратний диференціатор теплових сигналів
Випадковий патент: Установка для сушіння сипких харчових продуктів рослинного походження