Пристрій для зрушення металевого виробу
Формула / Реферат
1. Пристрій (1) для зрушення металевого виробу (2) з пристрою (3) для транспортування або на нього в напрямку (S), перпендикулярному напрямку (F) транспортування, при цьому пристрій (1) має рухомий відносно нерухомої стійки (4) автооператор (5), в одній кінцевій зоні (6) якого розташований щонайменше один захоплювальний елемент (7, 8) для захоплення металевого виробу (2), який відрізняється тим, що автооператор (5) має щонайменше дві консольні частини (5', 5"), при цьому щонайменше дві консольні частини (5', 5") виконані з можливістю телескопічного всування одна в одну.
2. Пристрій за п. 1, який відрізняється тим, що автооператор (5) має дві консольні частини (5', 5"), виконані з можливістю телескопічного всування одна в одну.
3. Пристрій за п. 1 або 2, який відрізняється тим, що консольні частини (5', 5") мають прямокутний в поперечному перерізі основний контур.
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що щонайменше один захоплювальний елемент (8) встановлений з можливістю повороту навколо осі (9).
5. Пристрій за п. 4, який відрізняється тим, що вісь (9) орієнтована горизонтально в напрямку (F) транспортування виробу.
6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що передбачені два захоплювальних елементи (7, 8), з яких один розташований на найбільш внутрішній консольній частині (5"), що телескопічно всувається, і один розташований на консольній частині (5'), в якій безпосередньо розміщується найбільш внутрішня консольна частина (5"), що телескопічно всувається.
7. Пристрій за п. 6, який відрізняється тим, що розташований на найбільш внутрішній консольній частині (5"), що телескопічно всувається, захоплювальний елемент (7) встановлений з можливістю повороту навколо осі (9), і що захоплювальний елемент (8), розташований на консольній частині (5'), в якій безпосередньо розміщується найбільш внутрішня консольна частина (5"), що телескопічно всувається, жорстко закріплений на цій консольній частині (5').
8. Пристрій за п. 6 або 7, який відрізняється тим, що захоплювальний елемент (8), розташований на найбільш внутрішній консольній частині (5"), що телескопічно всувається, розташований з можливістю повороту так, що найбільш внутрішня консольна частина (5"), що телескопічно всувається, разом із захоплювальним елементом (8) може максимально, переважно повністю, всовуватися в консольну частину (5'), в якій безпосередньо розміщується найбільш внутрішня консольна частина (5"), що телескопічно всувається.
9. Пристрій за будь-яким з пп. 6-8, який відрізняється тим, що передбачена гідравлічна циліндропоршнева система (10) для переміщення найбільш внутрішньої консольної частини (5"), що телескопічно всувається, відносно консольної частини (5'), в якій безпосередньо розміщується найбільш внутрішня консольна частина (5"), що телескопічно всувається.
10. Пристрій за будь-яким з пп. 1-9, який відрізняється тим, що вздовж пристрою (3) транспортування розташовані щонайменше два таких пристрої (1), при цьому приведення в дію щонайменше частини консольних частин (5', 5") здійснюється за допомогою спільного привідного пристрою (11).
Текст
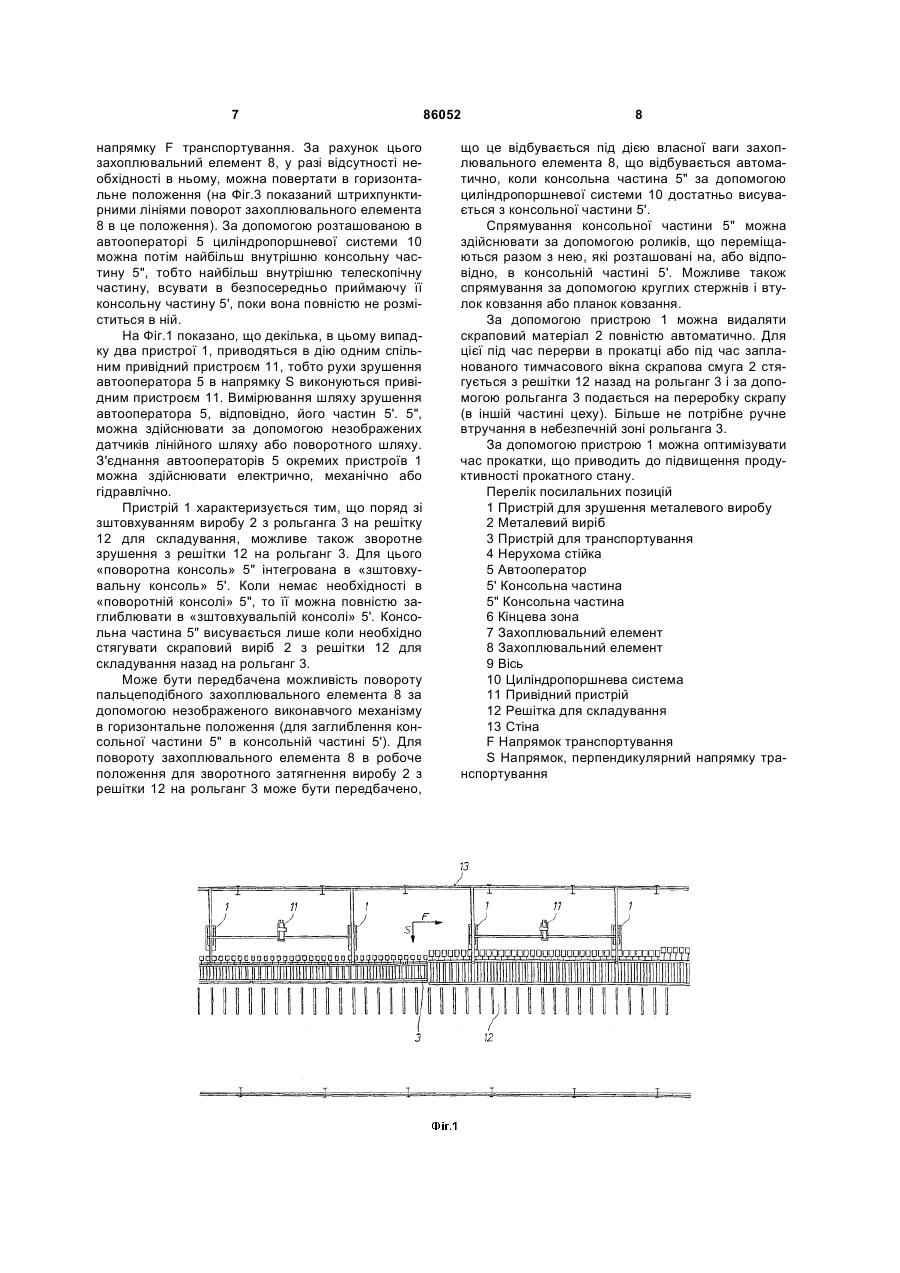
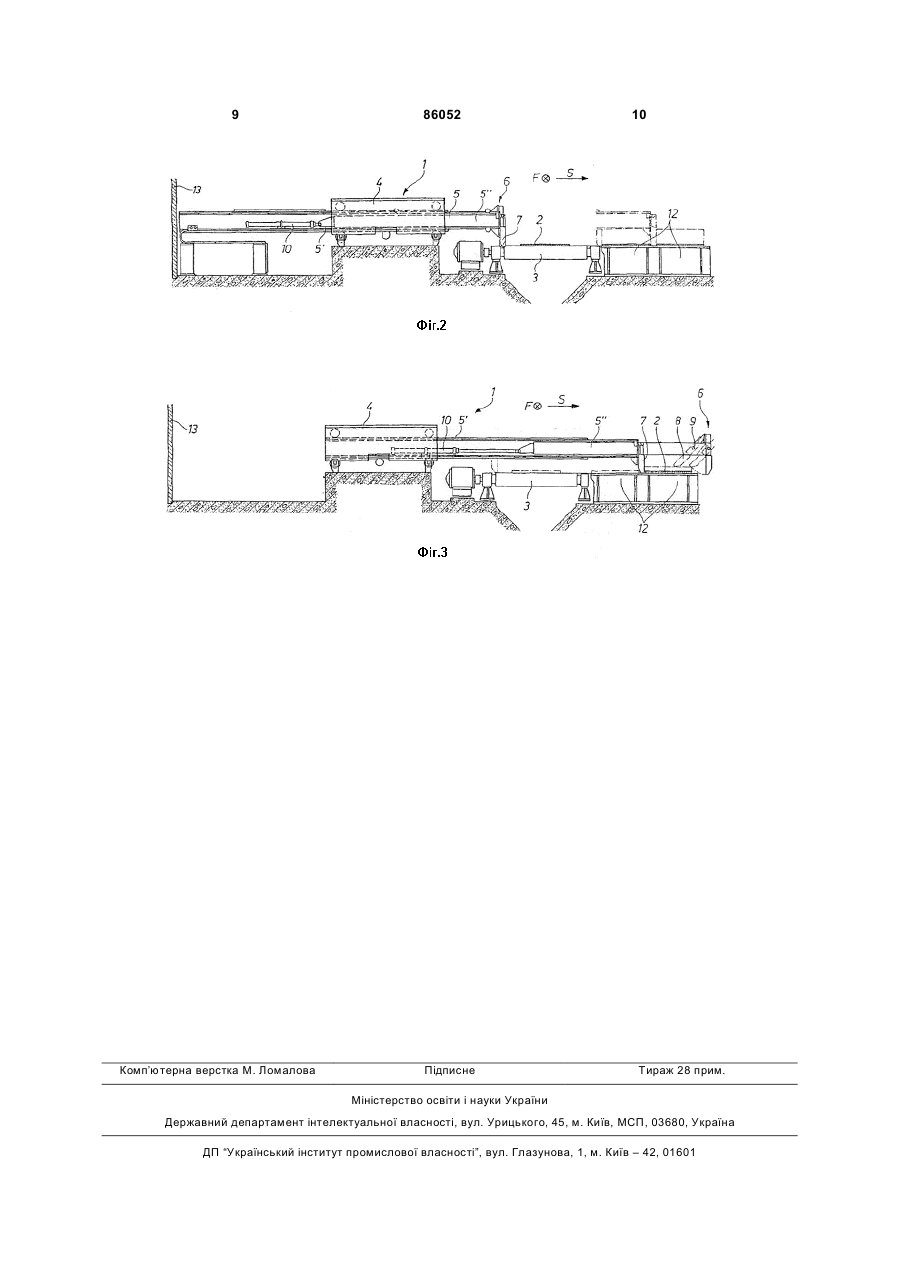
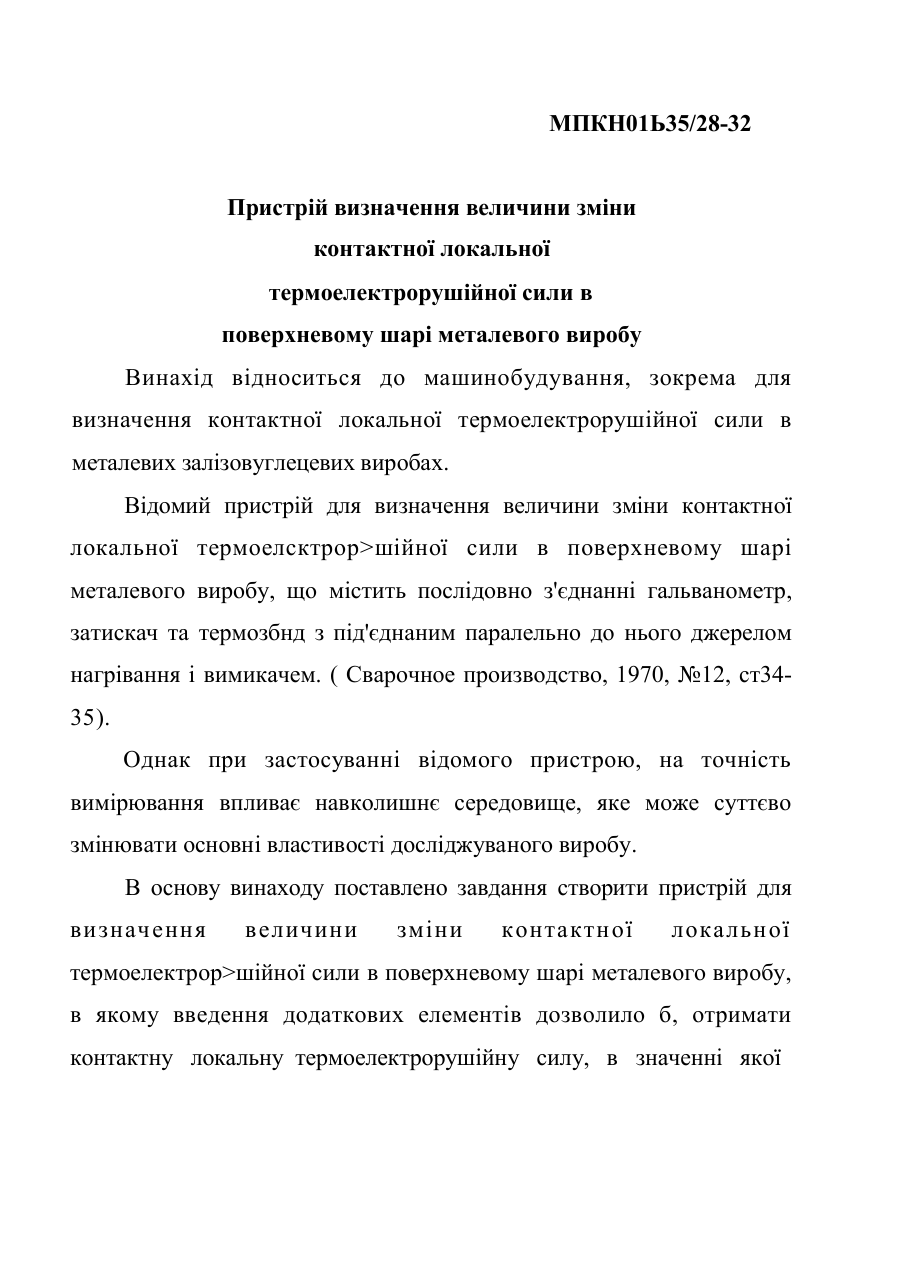
1. Пристрій (1) для зрушення металевого виробу (2) з пристрою (3) для транспортування або на нього в напрямку (S), перпендикулярному напрямку (F) транспортування, при цьому пристрій (1) має рухомий відносно нерухомої стійки (4) автооператор (5), в одній кінцевій зоні (6) якого розташований щонайменше один захоплювальний елемент (7, 8) для захоплення металевого виробу (2), який відрізняється тим, що автооператор (5) має щонайменше дві консольні частини (5', 5"), при цьому щонайменше дві консольні частини (5', 5") виконані з можливістю телескопічного всування одна в одну. 2. Пристрій за п. 1, який відрізняється тим, що автооператор (5) має дві консольні частини (5', 5"), виконані з можливістю телескопічного всування одна в одну. 3. Пристрій за п. 1 або 2, який відрізняється тим, що консольні частини (5', 5") мають прямокутний в поперечному перерізі основний контур. 4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що щонайменше один захоплювальний елемент (8) встановлений з можливістю повороту навколо осі (9). 5. Пристрій за п. 4, який відрізняється тим, що вісь (9) орієнтована горизонтально в напрямку (F) транспортування виробу. 2 (19) 1 3 Винахід стосується пристрою для зрушення металевого виробу з пристрою транспортування або на нього в напрямку, перпендикулярному напрямку транспортування, при цьому пристрій має рухомий відносно нерухомої стійки автооператор, в одній кінцевій зоні якого розташований щонайменше один захоплювальний елемент для захоплення металевого виробу. При виникненні несправностей в прокатному стані, передусім в прокатному стані високої продуктивності, може виникати випадок, коли гарячий, нагрітий для процесу прокатки металевий виріб (зокрема, плоскі злитки або чорнові смуги), які підлягають прокатці, необхідно затримувати на рольгангу (тобто пристрої транспортування), поки не буде усунена несправність. Якщо потім виріб дуже сильно охолодився, то його не можна більше використовувати і прокатувати. Він підлягає видаленню як скрап. Для того щоб відновити виробництво після усунення несправності, необхідно видалити смугу з рольганга, що йде в скрап. Для цього використовуються вказані спочатку пристрої, які можуть зрушувати скрап в горизонтальному напрямку упоперек напрямку транспортування рольганга на решітку для складування. Таким чином, мова йде, наприклад, про зштовхувач чорнових смуг, за допомогою якого можна видаляти скрап з лінії прокатки за допомогою зрушення. За допомогою таких пристроїв можна зменшити тривалість простою виробництва і тим самим підвищити економічність процесу прокатки. У [SU 1766548 Al] розкритий зсувний пристрій, за допомогою якого металевий виріб можна зрушувати упоперек напрямку транспортування рольганга. При цьому виріб зсувається автооператором, який встановлений в станині з можливістю переміщення; на автооператорі розташовані пальцеподібні захоплювальпі елементи, які можуть приходити в контакт з виробом. При цьому пристрій є відносно великим в напрямку, поперечному напрямку транспортування, оскільки автооператор необхідно зрушувати на більшу ширину. Аналогічні рішення виходять з [SU 1060265 A. SU 1036422 А і SU 582018 А]. У всіх випадках передбачений відносно далеко виступаючий автооператор, який встановлений в корпусі з можливістю зсуву упоперек напрямку транспортування рольганга. У [JP 10263624 А] пропонується аналогічний пристрій, в якому пальцеподібні захоплювальні елементи можуть при необхідності переміщатися в положення вертикально вниз. У цьому випадку автооператор також виступає відносно далеко в напрямку упоперек напрямку транспортування рольганга. У [DE-OS 2600784] також описується проблема швидкого видалення частин чорнової смуги з рольганга, однак при цьому не приводяться дані відносно конструктивних деталей зштовхувача чорнових смуг. Хоч за допомогою відомих пристроїв для зрушення металевого виробу з рольганга, і відповідно, на нього забезпечується можливість маніпулювання скраповою смугою, у відомих рішеннях виникають проблеми, коли такими зштовхувачами чорнової смуги необхідно обладнати існуючі стани. Як правило, існуючі стани не мають простору для 86052 4 подальшої інтеграції зштовхувача чорнової смуги відомого виду, оскільки він вимагає значного простору для розміщення. Але і в нових станах відомі пристрої мають той недолік, що вони вимагають відносно багато місця, що пов'язано з відповідними витратами. Крім того, недоліком є те, що не всі відомі пристрої забезпечують при необхідності можливість зрушення зрушеного з рольганга скрапового виробу знов на рольганг. А саме, в деяких випадках можна скрапові смуги зрушувати з рольганга в бічному напрямку. Однак в цьому випадку не придатні більше для прокатки плоскі заготівки або чорнові смуги необхідно в зрушеному на решітку для складання положенні подрібнити вручну за допомогою газових пальників і транспортувати геть. Це пов'язано зі значними витратами і тому обходиться дорого. Тому бажане створення пристрою, який придатний як для зштовхування скрапового виробу з рольганга, так і для штовхання скрапового виробу знов па рольганг. А саме, в цьому випадку скрап можна в більш пізній момент часу транспортувати геть по рольгангу, що має значні економічні переваги. Тому в основу винаходу встановлена задача такого удосконалення пристрою вказаного спочатку виду, щоб виключити вказані недоліки. Таким чином. зштовхувальні пристрої повинні мати значно меншу потребу в просторі без негативного впливу на функції пристрою. Зокрема, повинно забезпечуватися як зштовхування скрапового виробу з рольганга, так і при необхідності штовхання виробу на рольганг. Вирішення цієї задачі за допомогою винаходу характеризується тим, що автооператор пристрою має щонайменше дві консольні частини, при цьому щонайменше дві консольні частини виконані з можливістю телескопічного всування одна в одну. Автооператор переважно має три консольні частини, виконані з можливістю телескопічного всування одна в одну. У одній модифікації передбачено, що консольні частини в поперечному перерізі мають прямокутний основний контур. За рахунок цього досягається висока стійкість, зокрема, проти скручування навколо подовжньої осі консолі. Щонайменше один із захоплювальних елементів може бути встановлений з можливістю повороту навколо осі. При цьому вісь переважно направлена горизонтально в напрямку транспортування виробу. Для забезпечення як зштовхування скрапового матеріалу з рольганга, так і зворотного штовхання матеріалу з решітки для складування на рольганг простим чином, в пристрої можуть бути передбачені два захоплювальних елементи, з яких один розташований на найбільш внутрішній консольній частині, що телескопічно всувається, і один розташований на консольній частині, в якій безпосередньо розміщується найбільш внутрішня консольна частина, що телескопічно всувається. При цьому переважно передбачено, що розташований на найбільш внутрішній консольній частині, що телескопічно всувається, захоплювальний еле 5 мент встановлений з можливістю повороту навколо вказаної осі: крім того, згідно з цим варіантом виконання, захоплювальний елемент, розташований на консольній частині, в якій безпосередньо розміщується найбільш внутрішня консольна частина, що телескопічно всувається, жорстко закріплений на цій консольній частині. Крім того, в цьому рішенні може бути передбачено, що захоплювальний елемент, розташований на найбільш внутрішній консольній частині, що телескопічно всувається, розташований з можливістю повороту так, що найбільш внутрішню консольну частину, що телескопічно всувається, разом із захоплювальним елементом можна максимально, переважно повністю, всувати в консольну частину, в якій безпосередньо розміщується найбільш внутрішня консольна частина, що телескопічно всувається. За рахунок цього особливо переважним чином досягається те, що частина пристрою, яка передбачена для зворотного штовхання скрапового матеріалу з решітки для складування на рольганг, у разі відсутності необхідності в ній, повністю всовується в консоль і тим самим не створює ніяких перешкод. Крім того, переважно передбачена гідравлічна циліндропоршнева система для зрушення найбільш внутрішньої консольної частини, що телескопічно всувається, відносно консольної частини, в якій безпосередньо розміщується найбільш внутрішня консольна частина, що телескопічно всувається. Добре зарекомендувало себе розташування декількох пристроїв вказаного виду вздовж рольганга для забезпечення зрушення також довгих скрапових смуг. У цьому випадку може бути передбачено, що при розташуванні щонайменше двох пристроїв вздовж пристрою транспортування, приведення в дію щонайменше частини консольних частин здійснюється за допомогою спільного привідного пристрою. За допомогою запропонованого пристрою, згідно з винаходом, можна особливо компактним чином реалізувати зштовхувач смуг, який дуже добре підходить для дообладнання існуючих прокатних станів. За рахунок невеликого місця, що займається пристроєм, забезпечуються також поліпшені і економічні рішення також для нових станів. Нижче приводиться докладний опис винаходу з посиланнями на прикладені креслення, на яких зображений приклад виконання винаходу, а саме: Фіг.1 - пристрій для транспортування для плоских заготівок разом з периферійними частинами, вигляд зверху; Фіг.2 - пристрій для зрушення металевого виробу при зштовхуванні виробу з пристрою для транспортування, вигляд збоку; і Фіг.3 - пристрій при штовханні виробу назад на пристрій транспортування, вигляд збоку. Як показано на Фіг.1 вздовж пристрою 3 для транспортування у вигляді рольганга можна транспортувати металевий виріб (не зображено) в напрямку F транспортування. Якщо в прокатному стані виникає несправність, і попередній нагрітий виріб прокатки, який транспортується по пристрою 3 для транспортування до незображеного прокат 86052 6 ного блока, остигає дуже сильно внаслідок несправності, то його необхідно видалити як скрап. Для видалення скрапового матеріалу, щоб знов запустити виробничий процес після усунення несправності, збоку у пристрої 3 для транспортування розташовані грати 12 для складування. Вздовж пристрою 3 транспортування в показаному прикладі розташовані чотири пристрої 1 для зрушення металевого виробу. За допомогою пристроїв 1 можна виріб, який знаходиться на пристрої 3 для транспортування, зрушувати в горизонтальному напрямку S перпендикулярно напрямку F транспортування, а саме як з рольганга 3 на решітку 12, так і в зворотному напрямку, тобто з решітки 12 на рольганг 3. Останнє забезпечує можливість транспортування скрапового матеріалу за допомогою рольганга 3, коли він не потрібний для виробництва. Деталі конструкції пристрою 1 показані на Фіг.2 і 3. Пристрій 1 має нерухому стійку 4, яка розташована збоку у рольганга 3. В стійці 4 встановлений з можливістю зрушення в напрямку S автооператор 5. В кінцевій зоні 6 автооператора 5 розташований захоплювальний елемент 7 у вигляді пальцеподібного штовхача. Як показано на Фіг.2, можна за допомогою захоплювального елемента 7 зіштовхувати металевий виріб 2 з рольганга 3 на решітку 12 для складування. Для цього автооператор 5 зсувається праворуч відносно стійки 4 за допомогою незображених привідний елементів. Після зрушення автооператор 5 займає положення, частково показане на Фіг.2 пунктирною лінією. Для збереження необхідного пристроєм 1 простору по можливості меншим, а також для забезпечення можливості дообладнання існуючих прокатних станів пристроєм 1, автооператор 5 виконаний з декількох частин. У даному прикладі виконання він має дві консольні частини 5', 5", які можна телескопічно всувати одна в одну. На Фіг.2 показані суцільними лініями (за винятком невидимих частин, які зображені пунктирними лініями) дві консольні частини 5', 5" у всуненому одна в одну стані. Можна бачити, що потрібно відносно невелике місце, яке в цьому випадку сильно обмежене стіною 13. Незважаючи на це, можна реалізувати великий шлях зрушення виробу 2 в напрямку S, як випливає із зображеного пунктиром максимального кінцевого положення автооператора 5 (праворуч на Фіг.2). Для забезпечення зрушення виробу 2 як в напрямку S з рольганга 3 на решітку 12 для складування, так і при необхідності назад з решітки 12 на рольганг 3, в прикладі виконання передбачено, що консольна частина 5' забезпечена захоплювальним елементом 7, за допомогою якого виріб 2 можна зіштовхувати з рольганга 3 на решітку 12 для складування. Для зворотного штовхання виробу 2 з решітки 12 на рольганг 3 передбачений інший захоплювальний елемент 8, який розташований на кінці найбільш внутрішньої консольної частини 5". На Фіг.3 автооператор 5 показаний в максимально висуненому положенні. Можна бачити, що захоплювальний елемент 8 встановлений з можливістю повороту навколо осі 9, при цьому вісь 9 розташована горизонтально в 7 напрямку F транспортування. За рахунок цього захоплювальний елемент 8, у разі відсутності необхідності в ньому, можна повертати в горизонтальне положення (на Фіг.3 показаний штрихпунктирними лініями поворот захоплювального елемента 8 в це положення). За допомогою розташованою в автооператорі 5 циліндропоршневої системи 10 можна потім найбільш внутрішню консольну частину 5", тобто найбільш внутрішню телескопічну частину, всувати в безпосередньо приймаючу її консольну частину 5', поки вона повністю не розміститься в ній. На Фіг.1 показано, що декілька, в цьому випадку два пристрої 1, приводяться в дію одним спільним привідний пристроєм 11, тобто рухи зрушення автооператора 5 в напрямку S виконуються привідним пристроєм 11. Вимірювання шляху зрушення автооператора 5, відповідно, його частин 5'. 5", можна здійснювати за допомогою незображених датчиків лінійного шляху або поворотного шляху. З'єднання автооператорів 5 окремих пристроїв 1 можна здійснювати електрично, механічно або гідравлічно. Пристрій 1 характеризується тим, що поряд зі зштовхуванням виробу 2 з рольганга 3 на решітку 12 для складування, можливе також зворотне зрушення з решітки 12 на рольганг 3. Для цього «поворотна консоль» 5" інтегрована в «зштовхувальну консоль» 5'. Коли немає необхідності в «поворотній консолі» 5", то її можна повністю заглиблювати в «зштовхувальпій консолі» 5'. Консольна частина 5" висувається лише коли необхідно стягувати скраповий виріб 2 з решітки 12 для складування назад на рольганг 3. Може бути передбачена можливість повороту пальцеподібного захоплювального елемента 8 за допомогою незображеного виконавчого механізму в горизонтальне положення (для заглиблення консольної частини 5" в консольній частині 5'). Для повороту захоплювального елемента 8 в робоче положення для зворотного затягнення виробу 2 з решітки 12 на рольганг 3 може бути передбачено, 86052 8 що це відбувається під дією власної ваги захоплювального елемента 8, що відбувається автоматично, коли консольна частина 5" за допомогою циліндропоршневої системи 10 достатньо висувається з консольної частини 5'. Спрямування консольної частини 5" можна здійснювати за допомогою роликів, що переміщаються разом з нею, які розташовані на, або відповідно, в консольній частині 5'. Можливе також спрямування за допомогою круглих стержнів і втулок ковзання або планок ковзання. За допомогою пристрою 1 можна видаляти скраповий матеріал 2 повністю автоматично. Для цієї під час перерви в прокатці або під час запланованого тимчасового вікна скрапова смуга 2 стягується з решітки 12 назад на рольганг 3 і за допомогою рольганга 3 подається на переробку скрапу (в іншій частині цеху). Більше не потрібне ручне втручання в небезпечній зоні рольганга 3. За допомогою пристрою 1 можна оптимізувати час прокатки, що приводить до підвищення продуктивності прокатного стану. Перелік посилальних позицій 1 Пристрій для зрушення металевого виробу 2 Металевий виріб 3 Пристрій для транспортування 4 Нерухома стійка 5 Автооператор 5' Консольна частина 5" Консольна частина 6 Кінцева зона 7 Захоплювальний елемент 8 Захоплювальний елемент 9 Вісь 10 Циліндропоршнева система 11 Привідний пристрій 12 Решітка для складування 13 Стіна F Напрямок транспортування S Напрямок, перпендикулярний напрямку транспортування 9 Комп’ютерна верстка М. Ломалова 86052 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for displacement of metallic goods
Автори англійськоюThus Gunter, Werner Frank, Hanenberg Lothar
Назва патенту російськоюУстройство для сдвигания металлического изделия
Автори російськоюТюс Гюнтер, Вернер Франк, Ханенберг Лотар
МПК / Мітки
МПК: B21B 39/00
Мітки: виробу, пристрій, зрушення, металевого
Код посилання
<a href="https://ua.patents.su/5-86052-pristrijj-dlya-zrushennya-metalevogo-virobu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зрушення металевого виробу</a>
Пристрій визначення величини зміни контактної локальної термоелектрорушійної сили в поверхневому шарі металевого виробу
Номер патенту: 31476
Опубліковано: 15.12.2000
Автори: Юськів Василь Миколайович, Дзюбик Андрій Романович, Палаш Володимир Миколайович
МПК: H01L 35/00
Мітки: поверхневому, металевого, контактної, сили, локальної, зміни, шарі, виробу, термоелектрорушійної, пристрій, визначення, величини
Текст:
...силою в місці контакту першого термозонду з поверхнею досліджуваного зиробу, і контактною локальною термоелектрорушійною силою в місці контакту другого термозонду з поверхнею еталонного зразка. Така різниця компенсує вплив навколишнього середояища, а о*ґже, зміну основних властивостей досліджуваного виробу, як наслідок, підвищується точність вимірювань контактної локальної термоелектрорушійної сили. Амперметр забезпечує...
Спосіб визначення напружень в поверхневому шарі металевого виробу і пристрій для його реалізації
Номер патенту: 68991
Опубліковано: 16.08.2004
Автори: Кузьо Ігор Володимирович, Дзюбик Андрій Романович, Палаш Роман Володимирович
МПК: H01L 35/28, G01L 1/20, H01L 35/32
Мітки: напружень, спосіб, визначення, металевого, виробу, пристрій, шарі, реалізації, поверхневому
Формула / Реферат:
1. Спосіб визначення напружень в поверхневому шарі металевого виробу, згідно з яким у вільному від напружень еталонному зразку з того ж матеріалу, що і металевий виріб, визначають термоелектрорушійну силу (ТЕРС), яка виникає при контакті нагрітого термозонда з поверхнею зразка, створюють напружений стан, і ступенево змінюючи його, кожен раз вимірюють значення ТЕРС, за якими будують градуйовану залежність величини ТЕРС від величини напружень в...
Спосіб визначення напружень в поверхневому шарі металевого виробу і пристрій для його реалізації
Номер патенту: 30516
Опубліковано: 15.11.2000
Автори: Юськів Василь Миколайович, Палаш Володимир Миколайович, Дзюбик Андрій Романович
МПК: G01L 1/20, H01L 35/28, H01L 35/32
Мітки: реалізації, шарі, напружень, виробу, визначення, пристрій, металевого, поверхневому, спосіб
Формула / Реферат:
1. Спосіб визначення напружень в поверхневому шарі металевого виробу, згідно якого вимірюють значення контактної термоелектрорушійної сили, в залежності від величини якої визначають напруження, відрізняється тим, що в еталонному зразку вільному від напружень, з того ж матеріалу, що і металевий виріб, визначають термоелектрорушійну силу, яка виникає при контакті нагрітого термозонду з поверхнею зразка, створюють напружений стан і змінюючи...
Спосіб вимірювання довжини протяжного металевого виробу та пристрій для його здійснення
Номер патенту: 24986
Опубліковано: 25.12.1998
Автори: Совлуков Алєксандр Сєргєєвіч, Бушель Альберт Рафаілович, Драпкін Ілля Аронович
МПК: G01B 15/00
Мітки: пристрій, металевого, здійснення, виробу, довжини, вимірювання, протяжного, спосіб
Формула / Реферат:
1. Способ измерения длины протяженного металлического изделия, в частности трубы, при котором изделие располагают изолированно вблизи металлического экрана параллельно ему, возбуждают электромагнитные сигналы в совокупности данных проводников как в длинной линии и измеряют характеристики распространения этих сигналов, по которым судят о длине изделия, отличающийся тем, что в качестве возбуждаемых электромагнитных сигналов используют...
Спосіб футерування порожнистого металевого виробу
Номер патенту: 70083
Опубліковано: 15.03.2007
Автори: Тімофєєв Олександр Юрійович, Куцін Володимир Семенович, Яловий Олексій Іванович, Синяговський Володимир Іванович, Кузьменко Василь Іванович, Неведомський Володимир Олексійович
МПК: F16L 57/00, B22D 41/02, F16L 58/02, B28B 21/00
Мітки: порожнистого, футерування, металевого, спосіб, виробу
Формула / Реферат:
1. Спосіб футерування порожнистого металевого виробу, що включає нагрівання виробу до температури 500-700 °С, заповнення його внутрішньої порожнини розплавом силікатного матеріалу, витримування розплаву до утворення футерувального шару, наступний злив залишків розплаву силікатного матеріалу й охолодження виробу до температури навколишнього середовища, який відрізняється тим, що перед нагріванням виробу на його внутрішню поверхню наносять...
Попередній патент: Заміщені хіноліни
Наступний патент: Сполуки як модулятори опіоїдних рецепторів