Гравіметр для вимірів абсолютного значення прискорення сили тяжіння
Формула / Реферат
Гравіметр для вимірів абсолютного значення прискорення сили тяжіння симетричним способом на морі, який містить: електронний блок регулювання, прилад з відеоекраном, що сполучений з електронним блоком регулювання, соленоїд, сполучений з електронним блоком регулювання; несучий елемент, розташований всередині соленоїда, який має систему електромагнітного центрування, сполучену з електронним блоком регулювання; причому на несучому елементі закріплена електронна схема, яка містить три датчики кутової швидкості, розташовані в горизонтальній площині під різними кутами один до одного, сполучені із електронною блок-схемою алгоритму роботи гравіметра, розташованою у електронному блоці регулювання, та референтний відбивач; також містить джерело монохроматичного променя, вимірювальний інтерферометр, до складу якого входить ділильний елемент монохроматичного променя, рухомий відбивач, розміщений у вакуумній камері, систему поворотних дзеркал із напівпрозорим дзеркалом на виході, оптично сполученим з електронною схемою відліку шляху та часу, сполученою із електронним блоком регулювання; вакуумна камера має магнітні уловлювачі і катапульту; катапульта має додатковий соленоїд, сполучений із електронним блоком регулювання.
Текст
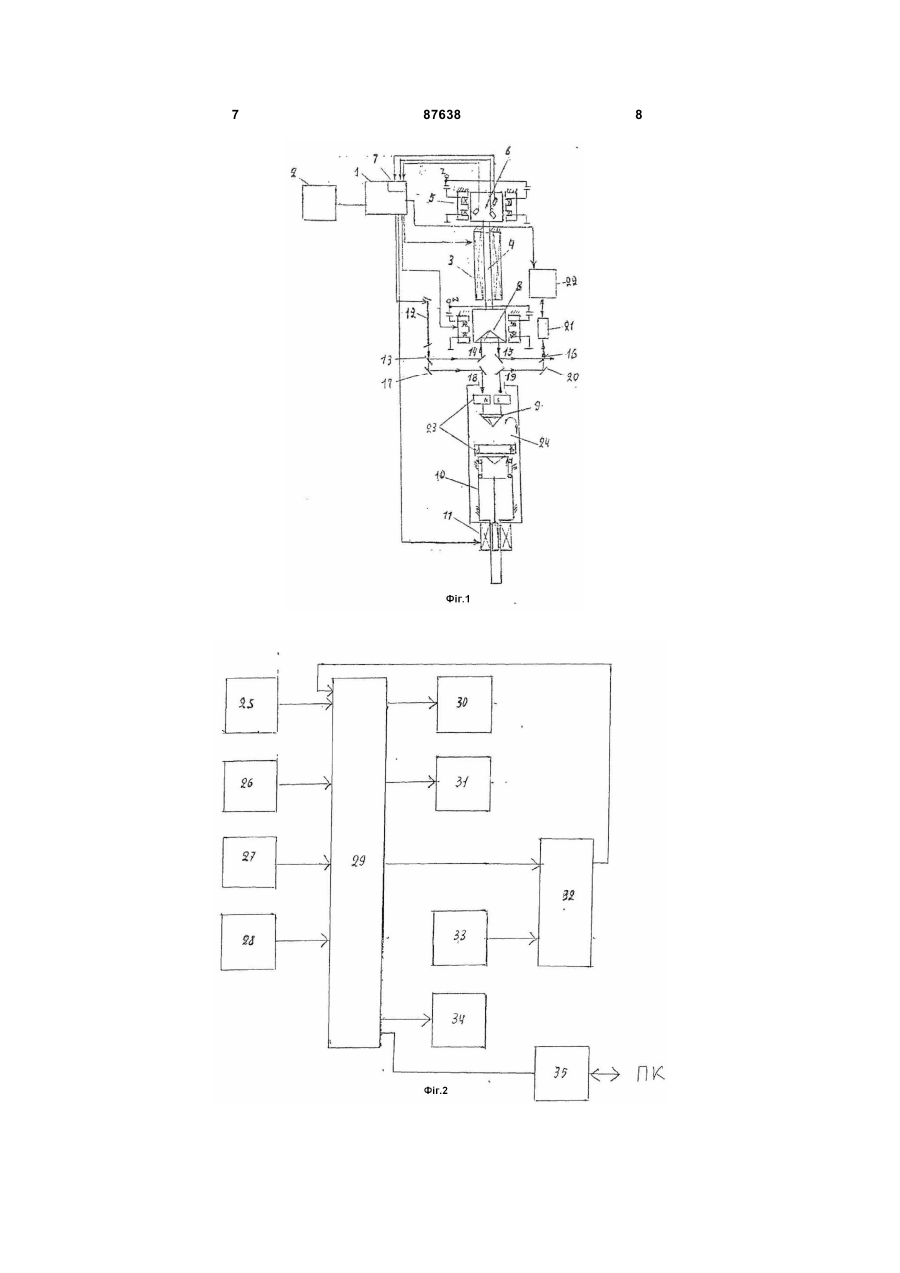
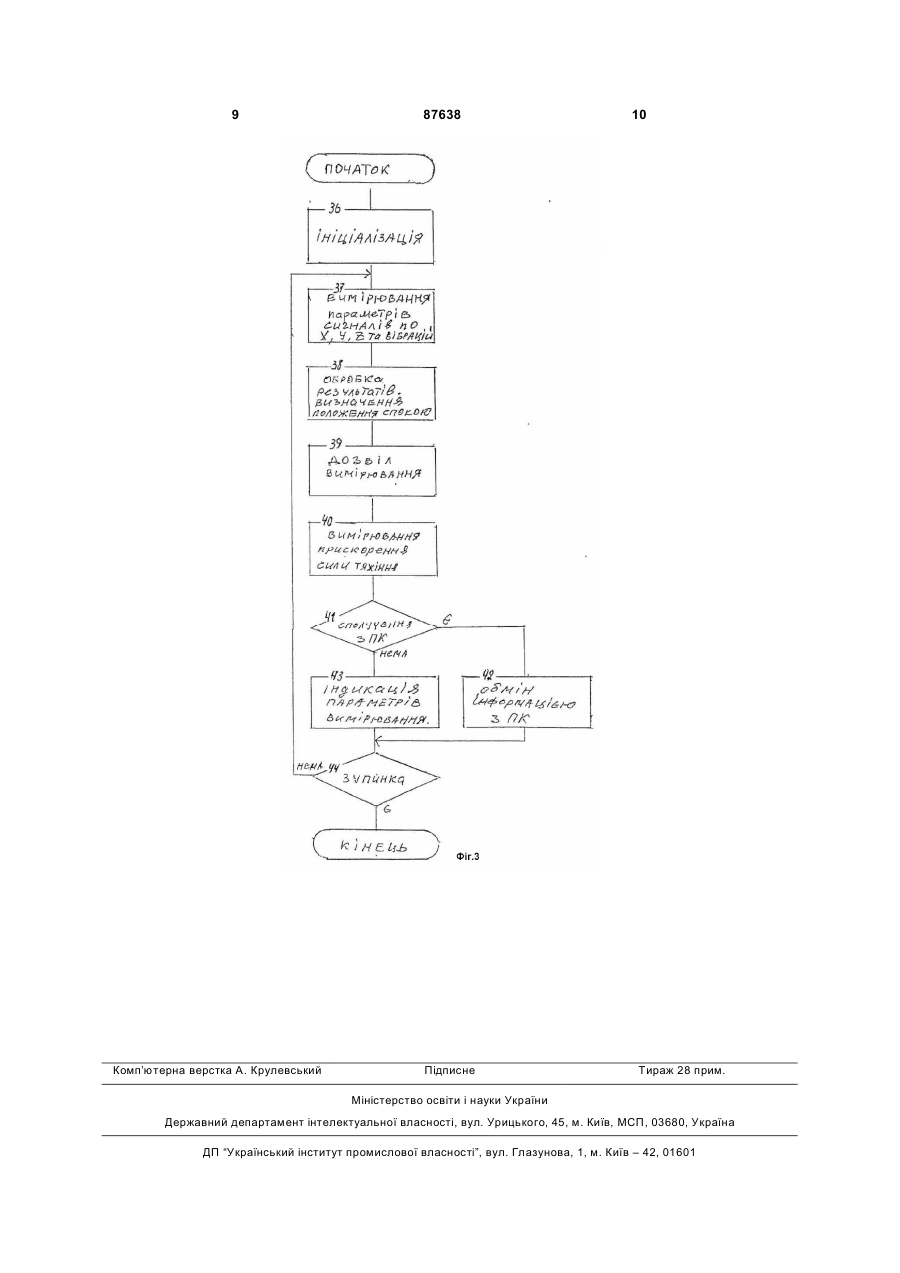
Гравіметр для вимірів абсолютного значення прискорення сили тяжіння симетричним способом на морі, який містить: електронний блок регулювання, прилад з відеоекраном, що сполучений з C2 2 (19) 1 3 Відомий пристрій для визначення абсолютного значення прискорення сили тяжіння несиметричним засобом, що містить соленоїд, струнний датчик лінійних прискорень, електронний блок регулювання й несучий елемент, розташований у середині соленоїда. На несучому елементі закріплені референтний відбивач, сполучений з оптичною схемою інтерферометра й струнний датчик лінійних прискорень, сполучений з електронним блоком регулювання, вихід якого сполучений із соленоїдом. У цьому пристрої точність виміру прискорення сили тяжіння в умовах збурюючих прискорень повинна забезпечуватися за рахунок ефективної обробки струнним датчиком лінійних прискорень змінних частот збурюючих прискорень, які електронним блоком регулювання перетворяться в електричні сигнали різної потужності й надходячи в соленоїд змінюють тягове зусилля його магнітного поля, утримуючи розташоване у середині соленоїда несучий елемент, із прикріпленим до нього референтним відбивачем і струнним датчиком лінійних прискорень у стані руху, який дорівнює руху судна під дію морської хвилі в момент вимірів, утримуючи нерухомим референтний відбивач відносно інтерферометра. Недоліком цього пристрою є те, що на чутливий елемент струнного датчика лінійних прискорень будуть впливати одночасно змінні по частоті й амплітуді збурюючи прискорення, обумовлені хвилюванням моря й знакозмінні з непостійною частотою й амплітудою прискорення вібрацій, що обумовлені роботою механізмів судна. Впливи на керуючий компенсаційним процесом елемент інформацій з різними амплітудно-частковими характеристиками й незбіжними фазами, можуть привести до виникнення резонансних явищ у системі, що втримує референтний відбивач у діючому стані при вимірах, що буде вносити неоднозначні погрішності у визначення абсолютного значення прискорення сили тяжіння. Застосування пристрою для визначення абсолютного значення прискорення сили тяжіння на морі з таким недоліком не може підвищити точність вимірів. Відомий гравіметр для вимірів абсолютного значення прискорення сили тяжіння симетричним засобом, що містить рухомий відбивач, виконаний у вигляді кутового світловідбивача й поміщеного у вакуумну камеру, інтерферометр, систему виміру шляху й часу вільного руху рухомого відбивача, електронний блок регулювання вимірами й катапульту для підкидання рухомого відбивача на задану висоту, що складається з котушки соленоїда й сердечника, сполученого з кареткою, при чому підвищення точності вимірів забезпечується тим, що довженна соленоїда й сердечника катапульти ставляться до заданої висоти підкидання рухомого відбивача неменше як 1/1, каретка сполучена із сердечником пружинним елементом, а із соленоїдом - кінематичне. При такому відношенні механізму катапультування до заданої висоти підкидання рухомого відбивача прискорення розгону рухомого відбивача дорівняє або менше сили тяжіння (а < g), що скорочує час дії сил пружинних деформацій 87638 4 на рухомий відбивач, що дозволяє почати виміри прискорення сили тяжіння через кілька сотих часток секунди після початку його вільного руху у вакуумній камері. Ці особливості дозволяють створювати малогабаритну, із малою висотою підкидання рухомого відбивача, швидкодіючу катапульту. що найбільше відповідає вимогам вимірів на морі. Недоліком цього гравіметра є те, що на вільний рух рухомого відбивача у вакуумній камері у момент вимірів, можуть впливати навколишні магнітні поля, вносячи невизначені перекручування у результатах вимірів. Метою цього винаходу є усунення зазначених недоліків, підвищення точності вимірів і їхній збіжності. На кресленні зображена схема гравіметра для абсолютних вимірів прискорення сили тяжіння симетричним засобом на морі: Фіг.1 Гравіметр містить: електронний блок регулювання 1, дисплей 2, що сполучений з електронним блоком регулювання; соленоїд 3, сполучений з електронним блоком регулювання; несучий елемент 4, розташований всередині соленоїда, який має систему електромагнітного центрування 5, сполученого із електронним блоком регулювання, причому, на несучому елементі закріплена електронна схема, яка містить три датчика кутової швидкості, розташованих в горизонтальній площині під різними кутами один до одного 6 (на кресленні умовно показані вертикально), сполучених із електронною блок-схемою алгоритму роботи гравіметра 7, розташованою у електроном блоці регулювання; та референтний відбивач 8, містить джерело монохроматичного проміння 12; вимірювальний інтерферометр, до складу якого входить ділильний елемент монохроматичного променя 13; рухомий відбивач 9, розміщений у вакуумній камері 24; система поворотних дзеркал 14, 15, 17, 18, 19, 20 і напівпрозоре дзеркало 16, оптично сполученого з фотоелектронним перетворювачем 21 і сполучену з ним електронну схему відліку слуху і часу 22, сполученої з електронним блоком регулювання; вакуумна камера має магнітні уловлювачі 23, і катапульту 10; катапульта має додатковий соленоїд 11, сполучений із електронним блоком регулювання. На Фіг.2 представлен варіант структурної схеми електронного блока регулювання. Він складається з датчиків кутової швидкості 25, 26, 27. контролю нерухомості референтного відбивача; датчиків вібрацій 28; мікро-контролера 29; пристрою керування соленоїдом (3)30; пристрою керування катапультою 31; пристрою сполучення із фотоелектронним помножувачем 32; схеми визначення початку і кінця вимірів 33; пристрою сполучення із дисплеєм (2) 34; пристрою сполучення з ПК 35. На Фіг.3 представлена електронна блок-схема алгоритму роботи гравіметра, яка містить: електронну схему ініціалізації 36; електронну схему вимірювання параметрів сигналів по XYZ та вібрацій 37; електрону схему обробки результатів визначення положення спокою 38; електронну схему дозволу вимірювання 39; електронну схему вимі 5 рювання прискорення сили тяжіння 40; електронну схему сполучення з ПК 41; електронну схему обміну інформацією з ПК 42; електронну схему індикації параметрів вимірювання 43; електронну схему зупинки вимірів 44. Установлений на силову гіроплатформу гравіметр робить у такий засіб: З електронного блока регулювання 1 на прилад з відео екраном 2; на систему електромагнітного центрування 5; на схему датчиків кутової швидкості 6 подається стабілізована напруга. На соленоїд 3 подається регулюєма напруга. У періоди відсутності вертикальних переміщень судна, які виникають у основі морської хвилі, та на її вершині й обумовлені інертністю маси судна, оператор, змінюючи напругу, що подається на соленоїд 3 й керуючись зображенням сигналу на екрані приладу 2, виводить несучий елемент 4 із закріпленими на ньому датчиками кутової швидкості 6 і референтним відбивачем 8 таким чином, щоб зображення сигналу на екрані приладу 2 було стабільне. Стабілізована напруга подається на джерело монохроматичного променя 12. Монохроматичний промінь ділильним елементом 13 розділяється на два променя, де перший промінь ділильним елементом 13 направляється на поворотне дзеркало 14 і на референтний відбивач 8, де тричі відбившись поворотним дзеркалом 15 й напівпрозорим дзеркалом 16 направляється на фотоелектронний перетворювач 21. Другий монохроматичний промінь поворотними дзеркалами 17 і 18 направляється на рухомий відбивач 9, де тричі відбившись поворотними дзеркалами 19, 20 направляється на напівпрозоре дзеркало 16 і об'єднавшись із першим монохроматичним променем, направляється на фотоелектронний перетворювач 21. Після включення стабілізованої напруги на блок-схему алгоритму роботи гравіметра відбувається ініціалізація мікро контролера (МК) 36; МК робить виміри параметрів лінійних переміщень по осям X,Y,Z 37; у блок-схемі відбувається цифрова обробка сигналів датчиків кутової швидкості з метою визначення становища нерухомості референтного відбивача 38: Після визначення площини спокою МК 39 видає дозвіл на вимірювання сили тяжіння 40, враховуючи корекції в залежності від вібрацій і знищення фази вимірів 41, 42, 43, 44. Одержав із блок-схеми алгоритму роботи гравіметра дозвіл на проведення вимірів прискорення сили тяжіння електронний блок регулювання подає стабілізовану напругу на фотоелектронний перетворювач 21 і сполучену з ним схему відліку шляху і часу 22. Електронний блок регулювання 1 подає імпульс стабілізованої напруги на додатковий соленоїд 11 катапульти 10. Рухомий відбивач 9 підкидається на задану висоту. Зміна вертикального положення рухомого відбивача 9 на величину, рівну половині довжині хвилі джерела монохроматичного проме 87638 6 ня 12, відносно референтного відбивача 8, викликає зміну однієї інтерференційної смуги. Інтерференційне зображення трансформується фотоелектронним перетворювачем 21 у електричні сигнали, які обробляються електронною схемою відліку шляху і часу 22 і по заданим величинам вираховується абсолютне значення прискорення сили тяжіння. Електронний блок регулювання може робить як уавтономному режимі так і разом з ПК. В автономному режимі результати вимірів виводять на цифровий дисплей. При роботі з ПК є можливість змінювати параметри роботи електронного блока регулювання, а також одержувати на екрані ПК різну інформацію. Застосування датчиків кутової швидкості з їх гіроскопічними здатностями і великою чутливістю визначення становища нерухомості референтного відбивача, узгодженні із блок-схемою алгоритму роботи гравіметра, підвищують точність вимірів симетричним засобом абсолютного значення прискорення сили тяжіння в умовах морського хвилювання. Система електромагнітного центрування, що складається з електромагнітів рівномірно розташованих, щодо несучого елемента, з послідовно виключеними ємностями, що утворять резонансні контури, виключає можливість механічного контакту між несучим елементом 4 і соленоїдом 3 у час вимірів при вібраціях, обумовлених роботою механізмів судна. Виготовлені у вигляді кільцеподібних деталей з магнітоємкого матеріалу, наприклад АРМКО, із вузьким розрізом по радіусу магнітні уловлювачі 23, що розташовані у вакуумній камері 24, притягують на себе навколишні магнітні поля, які, здобувши полярність, стікаються к торцям вузьких розрізів і взаємознищуються, що підвищує сходимість вимірів. Швидкодіюча катапульта 10 з малою висотою підкидання рухомого відбивача 9, із часом повного власного робочого циклу ~1с. знижує сумарний час вимірів будь-якого об'єму з підвищенням точності вимірів. Датчики кутової швидкості можуть бути застосовані, наприклад, фірми "Мурата" (каталог, октябрь 2002р. ЗАО "Симметрон ЭК") Джерела інформації. 1. А.П. Юзефович, Л.В. Огородова, «Гравіметрія» М. «Надра» 1980. с 36-61. 2. А.с. СССР. №772388 м кл2. ПРО 01. V 7/14 20.06.1980. 3. Патент Ц.А. 6921 сі ПРО 01. В 7/14. 31.03.1995. Бюл. №1 А.П. 4. Л.С. Жданов, В.А. Маранджян «Курс физики» ч.11 «Наука», М. 1970. с 168-169. 5. Заявка а200600850. 6. Фирма «murata» каталог. Октябрь 2002, ЗАО «Симметрон». 7 87638 8 9 Комп’ютерна верстка А. Крулевський 87638 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGravimeter for measurement of absolute value of acceleration of gravity
Автори англійськоюFedorovskyi Borys Mykolaiovych
Назва патенту російськоюГравиметр для измерения абсолютного значения ускорения силы тяжести
Автори російськоюФедоровский Борис Николаевич
МПК / Мітки
Мітки: гравіметр, тяжіння, сили, абсолютного, прискорення, вимірів, значення
Код посилання
<a href="https://ua.patents.su/5-87638-gravimetr-dlya-vimiriv-absolyutnogo-znachennya-priskorennya-sili-tyazhinnya.html" target="_blank" rel="follow" title="База патентів України">Гравіметр для вимірів абсолютного значення прискорення сили тяжіння</a>
Гравіметр для вимірювання абсолютного значення прискорення сили ваги
Номер патенту: 6921
Опубліковано: 31.03.1995
Автор: Федоровський Борис Миколайович
МПК: G01V 7/00
Мітки: вимірювання, гравіметр, сили, ваги, абсолютного, прискорення, значення
Формула / Реферат:
(57) . Гравиметр для измерения абсолютного значения ускорения силы тяжести, содержащий пробное тело, выполненное в виде уголкового светоотражателя и помещенное в вакуумную камеру, интерферометр, систему измерения пути и времени свободного движения пробного тела, блок управления измерениями и катапульту для подбрасывания пробного тела вертикально вверх на заданную высоту, состоящую из катушки соленоида и сердечника, связанного с...
Спосіб оптичного вимірювання величини прискорення сили тяжіння
Номер патенту: 33397
Опубліковано: 15.02.2001
Автори: Гніденко Микола Володимирович, Бурачек Всеволод Германович
МПК: G01N 13/00, G01N 13/10
Мітки: сили, оптичного, величини, прискорення, спосіб, вимірювання, тяжіння
Текст:
...ge = 1/12G * ке, звідки ке = & * і2е; (7) Де ge - прискорення сили тяжіння на пункті з відомим значенням величини прискорення сили тяжіння; і 1е - відстань між елементами смуги поглинання на пункті з відомим значенням величини прискорення сили тяжіння. На робочому пункті визначають величину прискорення сили тяжіння за формулою: gp=l/l P 2 * k c , Де gp - прискорення сили тяжіння на робочому пункті ; 1 Р - відстань між елементами...
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 82763
Опубліковано: 12.05.2008
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: інформації, аномалії, гравіметричної, прискорення, вимірювальної, спосіб, стиснення, сили, тяжіння
Формула / Реферат:
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає стиснення двовимірного масиву цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, який відрізняється тим, що формування масиву здійснюють шляхом занесення в нього цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння з урахуванням прив'язки до...
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: система, сили, тяжіння, вимірювань, прискорення, гравіметрична, аномалій, авіаційна
Формула / Реферат:
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас...
Спосіб вимірювання компонент градієнта сили тяжіння і градієнтометр
Номер патенту: 56092
Опубліковано: 15.04.2003
Автор: Куделя Леонід Аврамович
МПК: G01V 7/00
Мітки: спосіб, компонент, сили, градієнта, тяжіння, градієнтометр, вимірювання
Формула / Реферат:
1. Спосіб вимірювання компонент градієнта сили тяжіння по різниці їх дії на два пробних тіла, встановлених на незмінній відстані, наприклад, у гравітаційному градієнтометрі, який відрізняється тим, що як пробні тіла використовують принаймні два квантові стандарти частоти 2, 4, визначають дію компонент градієнта сили тяжіння за величиною зміни відносної різниці частоти сигналу, яку вимірюють щонайменше одним компаратором частотним з...
Попередній патент: Спосіб одержання 2′,2′-дифторнуклеозиду та його проміжних сполук, а також сполуки, одержані цим способом
Наступний патент: Спосіб отримання молоді (спату) мідій mytillus galloprovincialis для вирощування в чорному морі
Випадковий патент: Спосіб захисту трансформатора напруги від пошкоджень ферорезонансними процесами в електричних мережах з заземленою нейтраллю