Програмно-апаратний контролер інтерфейсу
Номер патенту: 90766
Опубліковано: 25.05.2010
Автори: Майків Ігор Мирославович, Кочан Володимир Володимирович, Кочан Роман Володимирович
Формула / Реферат
Програмно-апаратний контролер інтерфейсу, що містить послідовно з'єднані мікроконтролер, програмовану логічну матрицю і драйвер лінії зв'язку, який відрізняється тим, що в програмованій логічній матриці реалізовано схему, в яку входять три тригери, детектор початку повідомлення і послідовно з'єднані два подільники частоти генератора тактових імпульсів мікроконтролера, лічильник квантів часу і регістр зсуву, паралельний вихід якого підключено до шини даних мікроконтролера, а послідовний вхід - до виходу драйвера, до якого підключено також вхід детектора початку повідомлення, вихід якого підключено до першого входу встановлення першого тригера, вихід якого підключено до першого входу переривання мікроконтролера і входів скидання другого подільника і лічильника квантів часу, вихід якого підключено також до входу запису другого тригера і другого входу переривання мікроконтролера, причому виходи мікроконтролера підключені до блокуючого входу детектора початку повідомлення, другого входу встановлення і входу скидання першого тригера, інформаційного входу і входу запису третього тригера, вихід якого підключено до інформаційного входу другого тригера, вихід якого підключено до входу драйвера.
Текст
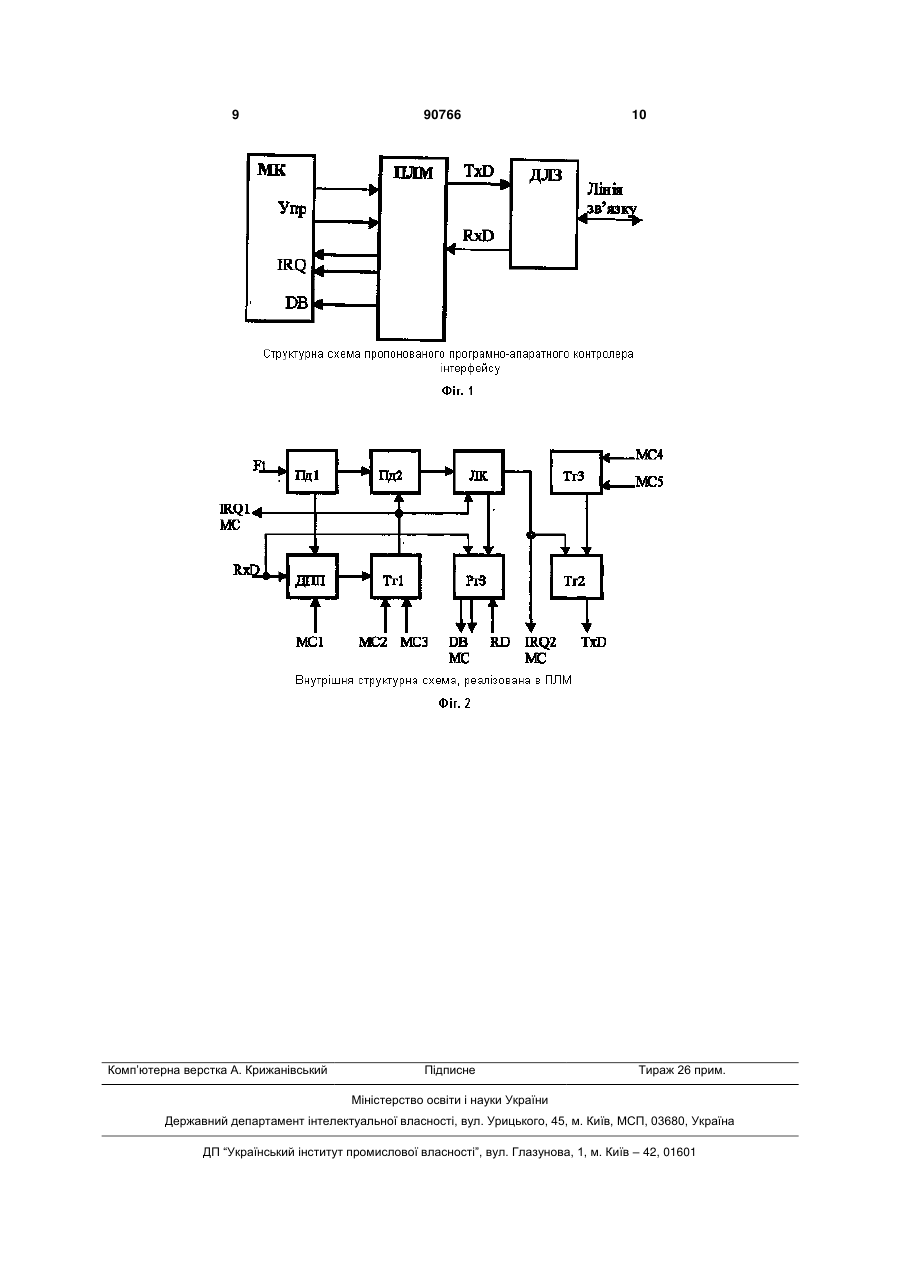
Програмно-апаратний контролер інтерфейсу, що містить послідовно з'єднані мікроконтролер, C2 2 (19) 1 3 рівень, і реалізує наступні функції: 1) формування повідомлень для передачі; 2) виявлення і корекція помилок в прийнятих повідомленнях; 3) управління потоком даних; 4) адресація вузлів; 5) реалізація механізмів арбітражу (доступу) до середовища передачі даних (лінії зв'язку) [2]. Фізичний рівень забезпечує обмін даними між вузлами мережі [2]. Його головною функцією є побітове перетворення цифрових даних (логічного значення) в електричні сигнали, а також їх передача/прийом через фізичне середовище передачі даних. Модель ISO/OSI розділяє фізичний рівень на три підрівні: 1) інтерфейс залежний від середовища (Medium Dependent Interface - MDI); 2) пристрою фізичного середовища (Physical Medium Attachment - РМА); 3) фізичної передачі даних (Physical Signaling - PLS). Перший підрівень (MDI) визначає механічні та електричні характеристики рознять та лінії зв'язку. Другий підрівень (РМА) визначає характеристики електричних сигналів, що передаються в мережу (вимоги до драйвера фізичної лінії). Третій підрівень (PLS) визначає процеси передачі/прийому бітів, що передбачає реалізацію трьох наступних функцій: 1) кодування/декодування біта (Bit Encoding/Decoding); 2) тактової синхронізації біта (Bit Timing); 3) синхронізація потоку даних (Synchronization). Ефективна реалізація вказаних функцій гарантує високу достовірність прийому даних на рівні біта. На даний час існує більше десятка інтерфейсів, що знайшли широке застосування в системах з розподіленими обчислювальними ресурсами. Їх поява зумовлена широким різноманіттям умов експлуатації, потужності потоку даних і допустимих затрат на реалізацію. Тому системи в загальному не можуть задовольнитись одним універсальним, економічно ефективним рішенням. Більшість інтерфейсів стандартизовані. Це вимагає від виробників обладнання забезпечити підтримку цілого набору поширених інтерфейсів. Традиційно набір інтерфейсів реалізують апаратно або програмне. Відомі рішення, де набір інтерфейсів реалізують апаратно - використовуючи набір спеціалізованих мікросхем контролерів інтерфейсу та драйверів фізичної лінії [6]. Цей підхід до реалізації набору інтерфейсів має ряд переваг: 1) висока швидкість обміну даними; 2) висока достовірність прийому даних; 3) мінімальне завантаження процесора вузла мережі процесами, пов'язаними із обміном повідомленнями. Однак: 1) значно зростають апаратні затрати і площа друкованої плати, які є затратами постійними (входять в кожен обчислювальний вузол окремо); 2) зростає енергоспоживання та габарити вузла, що теж можна віднести до постійних затрат. В результаті таке рішення є найдорожчим. Забезпечити підтримку набору вживаних інтерфейсів можна шляхом використання мікроконтролера із необхідним набором вбудованих інтерфейсів [7]. Однак зазвичай мікроконтролери не мають широкого набору інтерфейсів, а ті, що мають їх багато -дорогі. Тому таке рішення дешевше за попереднє, однак ціна таких мікроконтролерів 90766 4 висока і досить суттєво впливає на ціну обчислювального вузла. Іншим рішенням є програмна реалізація набору інтерфейсів - набір функцій канального рівня та підрівня фізичної передачі даних кожного інтерфейсу програмне виконує процесор вузла мережі. Він виконує набір підпрограм, кожна із яких реалізує одну із функцій контролера інтерфейсу. Перевагою такого підходу є мінімальні апаратні затрати, оскільки необхідно використати лише набір мікросхем-драйверів фізичної лінії [8, 9]. Зміна інтерфейсу вимагає лише переходу на інший набір підпрограм, що може бути розміщений в постійній пам'яті мікроконтролера або завантажених із сервера мережі. При цьому різко зростає складність програмного забезпечення - підпрограми інтерфейсу мусять виконуватися в реальному часі. Проте затрати на нього - разові (під час розробки вузла), тому таке рішення найдешевше. Однак воно дозволяє реалізувати з допомогою широко розповсюджених дешевих мікроконтролерів тільки низькі швидкості обміну даними. Підвищення продуктивності інтерфейсів (якщо і можливе) вимагає використання швидкісних мікроконтролерів, що суттєво збільшує постійні затрати. Прототипом запропонованого пристрою є програмовані модулі вводу-виводу UNIO фірми Fastwel [10]. Ці модулі реалізовано на базі програмованих логічних матриць (ПЛМ), які користувач може запрограмувати під один із необхідних інтерфейсів, використовуючи бібліотеку готових підпрограм (розміщених в постійній пам'яті мікроконтролера або завантажених із сервера мережі). При необхідності, користувач може розробити свою програму, що реалізує необхідний інтерфейс. Таке рішення поєднує переваги програмного і апаратного, оскільки у вузлі є апаратно реалізований контролер інтерфейсу, але його можна легко переналагодити на потрібний інтерфейс, як і при програмній реалізації. Однак в прототипі контролер інтерфейсу виконує і функції канального рівня, і підрівня фізичної передачі даних (PLS), що вимагає реалізації набору незалежних цифрових автоматів, кожен із яких реалізує один із вказаних процесів. Це веде до зростання апаратної складності контролера інтерфейсу, що вимагає ПЛМ значного об'єму і ціни. Метою винаходу є мінімізація затрат при реалізації універсального контролера послідовного інтерфейсу на програмованій логічній матриці за рахунок оптимального розподілу функцій канального рівня і підрівня фізичної передачі даних між мікроконтролером і програмованою логічною матрицею, що дало можливість мінімізації сумарних апаратних затрат на реалізацію обчислювального вузла. Суть пропонованого пристрою полягає в тому, що в програмованій логічній матриці програмноапаратного контролера інтерфейсу (який складається з послідовно з'єднаних мікроконтролера, програмованої логічної матриці та драйвера лінії зв'язку) реалізовано схему, куди входять три тригери, детектор початку повідомлення і послідовно з'єднані два подільники частоти генератора тактових імпульсів мікроконтролера, лічильник квантів 5 часу і регістр зсуву. Паралельний вихід регістра зсуву підключено до шини даних мікроконтролера, а вхід послідовних даних - до виходу драйвера лінії зв'язку, до якого підключено також вхід детектора початку повідомлення. Вихід останнього підключено до першого входу встановлення першого тригера, вихід якого підключено до першого входу переривання мікроконтролера і входів скидання другого подільника і лічильника квантів часу. Вихід лічильника квантів часу підключено також до входу запису другого тригера і другого входу переривання мікроконтролера. При цьому відповідні виходи мікроконтролера підключені до блокуючого входу детектора початку повідомлення, другого входу встановлення і входу скидання першого тригера, інформаційного входу і входу запису третього тригера. Вихід третього тригера підключено до інформаційного входу другого тригера, вихід якого підключено до входу драйвера лінії зв'язку. В пропонованому програмно-апаратному контролері інтерфейсу мікроконтролер реалізує функції канального рівня, а також підрівня фізичної передачі даних (PLS), що дозволяє розглядати процеси прийому і передачі повідомлень як набір окремих і незалежних процесів, які взаємодіють між собою. Два із них реалізують обробку і формування повідомлень в цілому (канальний рівень), а два інші обробку і формування біта (підрівень фізичної передачі даних). Тривалість вказаних процесів є детермінованою в часі і визначається типом інтерфейсу та заданою швидкістю обміну даними. Фізичний рівень визначає спосіб фізичного з'єднання вузлів. На фізичному рівні виконуються процеси передачі та/або прийому послідовного потоку бітів, що передбачає реалізацію трьох наступних функцій: 1) кодування/декодування біта (Bit Encoding/ Decoding); 2) тактової синхронізації біта (Bit Timing); 3) синхронізація потоку даних (Synchronization). Ефективна реалізація вказаних функцій у пропонованому контролері інтерфейсу гарантує високу достовірність прийому даних на рівні біта. Таким чином, мета винаходу в пропонованій схемі досягнута за рахунок роздільного виконання функцій канального рівня і підрівня фізичної передачі даних, тобто спеціалізації функцій компонентів відповідно до їх особливостей. Оскільки функції канального рівня пов'язанні із логічною обробкою послідовності бітів, то їх виконують програмне (їх реалізація покладена на процесор мікроконтролера). В той же час функції підрівня фізичної передачі даних пов'язані із процесами передачі/прийому в реальному часі кожного окремого біта - їх реалізовано апаратно на ПЛМ. Таке рішення одночасно: 1. спрощує схему, яку потрібно реалізувати в ПЛМ, через те, що ПЛМ виконує функції в реальному часі, які власне легко реалізуються апаратно, і не виконує логічної обробки, яка їй невластива; 2. різко знижує вимоги до часу реакції мікроконтролера на поступлення повідомлення (тобто до його швидкодії) і, тим самим, також спрощує програмне забезпечення, оскільки мікроконтролер 90766 6 отримує до оцінки ряд відліків після прийому біта, а не створює ці відліки; 3. дозволяє реалізувати різні типи послідовних інтерфейсів, оскільки апаратна частина, яка важко реконфігурується, займається прийомом і передачею тільки окремих бітів (цей процес однаковий для всіх інтерфейсів). А формуванням повідомлень в цілому ("складанням" бітів) займається програмна частина, яка легко адаптується під довільний тип послідовного інтерфейсу. Суть винаходу пояснює структурна схема пропонованого програмно-апаратного контролера інтерфейсу, представлена на Фіг.1, а на Фіг.2 показана внутрішня структурна схема, яку треба реалізувати в ПЛМ. В склад структурної схеми пропонованого програмно-апаратного контролера інтерфейсу (Фіг.1) входять мікроконтролер МК, програмована логічна матриця ПЛМ і драйвер лінії зв'язку ДЛЗ. ДЛЗ розділяє потоки даних на дані, які поступають при прийомі (лінія RxD) і дані, які передаються (лінія TxD). МК тісно співпрацює з ПЛМ через свої виходи управління Упр, входи переривання IRQ і шляхом прийому результатів тестування біта через шину даних DB. На Фіг.2 показана структурна схема, реалізована в ПЛМ. В неї входять два послідовно з'єднані подільники частоти генератора тактових імпульсів мікроконтролера Пд1 і Пд2, лічильник квантів часу ЛК, регістр зсуву Рг3, детектор початку повідомлення ДПП і тригери Тг1, Тг2, і Тг3. Розглянемо процес прийому біта схемою Фіг.2. Спочатку на вході детектора початку повідомлення ДПП появляється лог. 0, який детектор визначає і його вихідний сигнал перекидає тригер Тг1. Тг1 знімає сигнал скидання з входів подільника Пд2 і лічильника квантів часу ЛК, які починають працювати під дією вихідних імпульсів подільника Пд1. Одночасно вихід Тг1 поступає на вхід переривання мікроконтролера IRQ MC для підготовки його до прийому повідомлення. Вихідні імпульси ЛК (кванти тестування біта) поступають на вхід зсуву регістр зсуву Рг3, на вхід послідовних даних якого подано біт, що приймається. В Рг3, під дією імпульсів ЛК, що поступають на вхід зсуву, записуються значення лог. 0 і 1, які в момент імпульсів ЛК присутні на вході даних (проходить багатократне визначення значення біта). Останній імпульс ЛК поступає на другий вхід переривання мікроконтролера IRQ MC для прийому чергового біта. Мікроконтролер МК посилає на Рг3 сигнал RD, який вмикає вихід Рг3 (без дії сигналу RD вихід Рг3 знаходиться в третьому стані) і стан Рг3 поступає на шину даних МК DB MC, з якої його зчитує МК. МК, за співвідношенням лог. 0 і 1 визначає значення прийнятого біта і поміщає його в відповідну комірку пам'яті, де зберігається проміжні значення бітів прийнятого повідомлення. ЛК переповнюється, скидається в нуль і починає прийом наступного біта. Після прийому останнього біта повідомлення заданого формату (що задається підпрограмою обробки повідомлення МК) МК своїм сигналом МСЗ скидає Тг1, що закінчує роботу ПЛМ. Тг1 своїм виходом утримує Пд2 і ЛК у скинутому стані. 7 В процесі прийому повідомлення мікроконтролер МК виконує також ряд функцій, пов'язаних із обробкою повідомлення на канальному рівні, наприклад перевірка адреси, підрахунок контрольної суми або перевірку на парність (непарність). Конкретний перелік функцій визначається протоколом обміну даними даного інтерфейсу. При передачі повідомлення сигнал МС1 мікроконтролера МК блокує ДПП, а сигнал МС2 примусово перекидає Тг1, який знімає скидання з Пд2 і ЛК. В тригер Тг3 записується значення біта, який має бути переданий першим, шляхом виставлення значення цього біта (сигнал МС4) і подачі імпульсу на вхід запису (сигнал МС5). Останній імпульс ЛК поступає на вхід запису тригера Тг2, в який записується значення біта з Тг3. З виходу Тг2 значення біта поступає, через вихід TxD, на драйвер лінії зв'язку. Останній імпульс ЛК поступає також на другий вхід переривання мікроконтролера IRQ МС для запису в ТгЗ значення наступного біта, який буде переданий після переповнення ЛК. Процес передачі закінчується подачею сигналу МСЗ, що скидає Тг1. Тг1 своїм виходом утримує Пд2 і ЛК у скинутому стані. Наявність в схемі Фіг.2 детектора початку повідомлення ДПП полегшує роботу мікроконтролера МК шляхом подавлення коротких імпульсів завад, які явно не можуть бути стартовими імпульсами чергового повідомлення (довші імпульси завади відкидає мікроконтролер шляхом аналізу співвідношення прийнятих лог. 0 і 1). ДПП може бути виконаний як на базі аналогових схем (тригерів Шмідта і конденсаторних фільтрів), так і на базі їх комбінації з цифровими схемами (багатократного підтвердження наявності стартового імпульсу). В останньому випадку для роботи ДПП потрібні імпульси, які поступають з подільника Пд1 частоти тактового генератора МК. Пд1 не скидається, тому імпульси на ДПП поступають постійно, що забезпечує спрацювання ДПП в довільний момент часу. Швидкість обміну в пропонованому програмно-апаратному контролері інтерфейсу задається коефіцієнтами поділу подільників Пд1, Пд2 і лічильника квантів часу ЛК. Для її зміни при переналагодженні системи необхідно перепрограмувати ПЛМ з допомогою зовнішнього програматора. Можлива також зміна швидкості обміну в процесі роботи, тоді ПЛМ перепрограмовує мікроконтролер МК. Тоді він повинен зберігати в своїй постійній пам'яті прошивку ПЛМ, що дуже суттєво збільшує її об'єм. Слід відзначити універсальність пропонованого рішення. При необхідності зміни протоколу обміну даними або інтерфейсу (при використанні аналогічної лінії зв'язку), то це вимагає зміни тільки програмного забезпечення. Апаратне забезпечення, реалізоване ПЛМ, є тільки мінімально необхідним для прийому і передачі біта. Однак, на відміну від контролерів інтерфейсу реалізованих програмне [8, 9, 11], в пропонованому ефективні 90766 8 ше використовується МК, оскільки для формування часових затримок при прийомі та передачі біта використані не програмні, а апаратні засоби. Це дозволяє значно (майже на порядок) підвищити граничну швидкодію інтерфейсу для даного типу мікроконтролера, або використати час, який витрачав мікроконтролер на реалізацію програмного таймера, для виконання прикладного програмного забезпечення. Джерела інформації: 1. К. Кругляк Промышленные сети: цели и средства. - Современные технологии автоматизации, №4, 2002. - с.6-17 2. Компьютерные сети. 4-е изд. / Э. Таненбаум. СПб.: Питер, 2003. - 992с. 3. Е.Карпенко Возможности CAN-протокола. Современные технологии автоматизации, №4, 1998.-с. 16-20 4. С. Хвощ, X. Амаду Промышленные сети на базе стандарта MIL-STD-1553В. - Современные технологии автоматизации, №1, 1999.- 42-45с. 5. Интерфейсы систем обработки данных: Справочник / А.А. Мячев, В.Н. Степанов, В.К. Щербо; Под ред. А.А. Мячева. - М.: Радио и связь, 1989. - 416с. 6. D. Wobshall. An Implementation of IEEE 1451 NCAP for Internet Access of Serial Port-Based Sensors, Proceedings of second Sensor for Industry Conference SIcon/02, 19-21 November 2002, Houston, Texas, ISBN 1-55617-834-4, pp. 157-160. 7. LPC2292/LPC2294. 16/32-bit ARM microcontrollers; 256 kB ISP/IAP flash with CAN, 10bit ADC and external memory interface. Data sheet. Philips, Rev. 0.3 - 26 September, 2005. http://www.nxp.com/#/homepage/cb=[t=p,p=/50809/4 5994,i=LPC2292_2294_6]|pp=[v=p,t=pip,i=LPC2292_ 2294_6,fi=45994,ps=0]|[3] 8. R. Kochan, K. Lee, V. Kochan, A. Sachenko, Development of a Dynamically Reprogrammable NCAP, Proceedings of the IEEE Instrumentation and Measurement Technology Conference IMTC/2004. May 18-20, pp.1188-1193. 9. R. Kochan, V. Kochan, A. Sachenko, A. Stepanenko, I. Maykiv "Inteface and Reprogramming Controller for Dynamically Reprogrammable Network Capable Application Processor (NCAP)" Proceedings of third IEEE international workshop on Intelligent Data Acquisition and Advancing Computing Systems (IDAACS'2005), September 5-7, 2005, Sofia, Bulgaria, pp.639-642. 10. В. Беломытцев, М. Калаш Прогрммируемые интегральные схемы в модулях фирмы Fastwel. - Современные технологии автоматизации, №3, 2001. - с.80-84 11. Микропроцессорные средства производственных систем / В.Н Алексеев, A.M. Коновалов, В.Г. Колосов и др.; Под общ. ред. В.Г. Колосова. Л.: Машиностроение. Ленингр. Отд-ние, 1988. 287с. 9 Комп’ютерна верстка А. Крижанівський 90766 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSoftware/hardware intreface controller
Автори англійськоюMaikiv Ihor Myroslavovych, Kochan Roman Volodymyrovych, Kochan Volodymyr Volodymyrovych
Назва патенту російськоюПрограммно-аппаратный контроллер интерфейса
Автори російськоюМайкив Игорь Мирославович, Кочан Роман Владимирович, Кочан Владимир Владимирович
МПК / Мітки
МПК: H03K 19/0175, G06F 3/00
Мітки: контролер, програмно-апаратний, інтерфейсу
Код посилання
<a href="https://ua.patents.su/5-90766-programno-aparatnijj-kontroler-interfejjsu.html" target="_blank" rel="follow" title="База патентів України">Програмно-апаратний контролер інтерфейсу</a>
Програмно-апаратний модуль криптографічного захисту інформації
Номер патенту: 33745
Опубліковано: 15.02.2001
Автори: Лапін Віктор Валентинович, Горбенко Іван Дмитрович, Свинарьов Андрій Володимирович, Столяр Олександр Анатолійович, Торба Олександр Олексійович, Бондаренко Михайло Федорович
МПК: H04L 9/00
Мітки: захисту, криптографічного, модуль, програмно-апаратний, інформації
Текст:
...чином. У ПЗП 10 на етапі інсталяції програмноапаратного модуля криптографічного захисту ін формації заносяться алгоритми криптографічних перетворень. Процесори 7 і 9 при організації захищеного обміну на основі випадкових бітових послідовностей, сформованих генератором 8, виробляють ключі обміну. Крім цього, в процесорах 7 і 9 на основі випадкових бітових послідовностей генератора 8 формуються сеансові і робочі ключі, а також...
Програмно-апаратний комплекс для надання букмекерських послуг
Номер патенту: 25666
Опубліковано: 10.08.2007
Автор: Зайкова Ірина Юріївна
МПК: G06Q 99/00
Мітки: букмекерських, послуг, надання, програмно-апаратний, комплекс
Формула / Реферат:
Программно-апаратний комплекс для надання букмекерських послуг, що містить, N-платіжно-ігрових терміналів, грошовий платіжний інструмент, інтерфейси, центр збору і обробки інформації, який відрізняється тим, що в якості платіжний - ігрового терміналу використовують букмекерських термінал, що містить зв'язані між собою сенсорну панель введення даних гравцем, монітор, процесорну плату, що підтримує зв'язок з монітором і сенсорною панеллю, блок...
Програмно-апаратний комплекс для вивчення суспільної думки
Номер патенту: 49175
Опубліковано: 26.04.2010
Автор: Вировий Юрій Святославич
МПК: H04N 1/00
Мітки: комплекс, суспільної, думки, вивчення, програмно-апаратний
Формула / Реферат:
1. Програмно-апаратний комплекс для вивчення суспільної думки, що включає засоби аудіо- та відеопрезентацій матеріалів, які є предметом соціологічного дослідження, засоби введення моторних реакцій респондентів та їх перетворення в електричні сигнали, що кількісно характеризують реакцію кожного респондента, персональний комп'ютер для збереження та підсумкового аналізу зібраних даних реакції респондентів, засоби передачі даних про реакції...
Спосіб криптографічного захисту інформації і програмно-апаратний модуль для здійснення способу
Номер патенту: 36037
Опубліковано: 16.04.2001
Автори: Столяр Олександр Анатолійович, Горбенко Іван Дмитрович, Свинарьов Андрій Володимирович, Торба Олександр Олексійович, Бондаренко Михайло Федорович
МПК: H04L 9/06
Мітки: програмно-апаратний, здійснення, захисту, способу, криптографічного, модуль, спосіб, інформації
Текст:
...нього введені екран захисту по електро магнітному полю і механічно взаємозв'язаний з ним електричний контакт, сполучений з другим входом процесора криптографічних перетворювань. Таким чином, введення екрану захисту по електромагнітному полю і механічно взаємозв'язаного з ним електричного контакту, а також підпрограми для знищення інформації, дозволяють підвищити захист зберігаємої інформації. На фіг. зображена структурна схема...
Спосіб підвищення пропускної здатності каналу зв’язку на базі послідовного інтерфейсу та пристрій для його реалізації
Номер патенту: 25498
Опубліковано: 30.10.1998
Автори: Тимчишин Володимир Олександрович, Кочан Володимир Володимирович
МПК: G06F 11/26, G06F 11/00
Мітки: спосіб, базі, пропускної, каналу, підвищення, інтерфейсу, послідовного, зв'язку, реалізації, пристрій, здатності
Формула / Реферат:
1. Спосіб підвищення пропускної здатності каналу зв'язку на базі послідовного інтерфейсу за рахунок аналізу під час передачі кадру комп'ютером-передавачем наявності (відсутності) у лінії прийому квитуючого байта від комп'ютера-приймача і примусового припинення передачі решти кадру при відсутності прийому або виявленні помилки комп'ютером - приймачем, який відрізняється тим, що комп'ютер-передавач аналізує наявність (відсутність) стартового...