Апарат для активно-пасивної механотерапії щелеп
Номер патенту: 92750
Опубліковано: 26.08.2014
Автори: Панькевич Вікторія Вікторівна, Шаповалов Ігор Георгійович, Мокрик Олег Ярославович

Формула / Реферат
1. Апарат для активно-пасивної механотерапії щелеп, що містить корпус, ручку, дві назубні пластини, елементи вимірювання проміжку між щелепами і навантаження на жувальні м'язи, який відрізняється тим, що містить нижню та верхню змінні перфоровані назубні пластини, причому верхня назубна пластина жорстко закріплена до корпусу апарата, а нижня назубна пластина шарнірними з'єднаннями приєднана до важеля, на осі обертання якого в корпусі розташована пружина для можливості повернення важеля у вихідне положення, також до важеля системою шарнірних з'єднань приєднана ручка із вбудованим тензодавачем для вимірювання зусилля, яке припадає на жувальні м'язи, і на осі обертання якої розташовано високоточний давач обертання для вимірювання проміжку між щелепами, до протилежного від назубних пластин кінця корпусу жорстко приєднана опорна ручка, в якій розміщено джерело живлення для електронних компонентів, призначених для вимірювання та індикації зусилля жувальних м'язів та проміжку між щелепами, а також сигналізації і фіксації показників больових відчуттів пацієнта, що розташовані в передній панелі корпусу апарата, також на передній панелі розміщено цифрові індикатори проміжку між щелепами та навантаження на жувальні м'язи, засоби світлової та звукової сигналізації.
2. Апарат за п. 1, який відрізняється тим, що для математичної обробки даних з давачів та забезпечення індикації та сигналізації апарат містить програмований мікроконтролер.
3. Апарат за п. 1, який відрізняється тим, що до складу апарата введено набір змінних перфорованих назубних пластин різних розмірів.
Текст
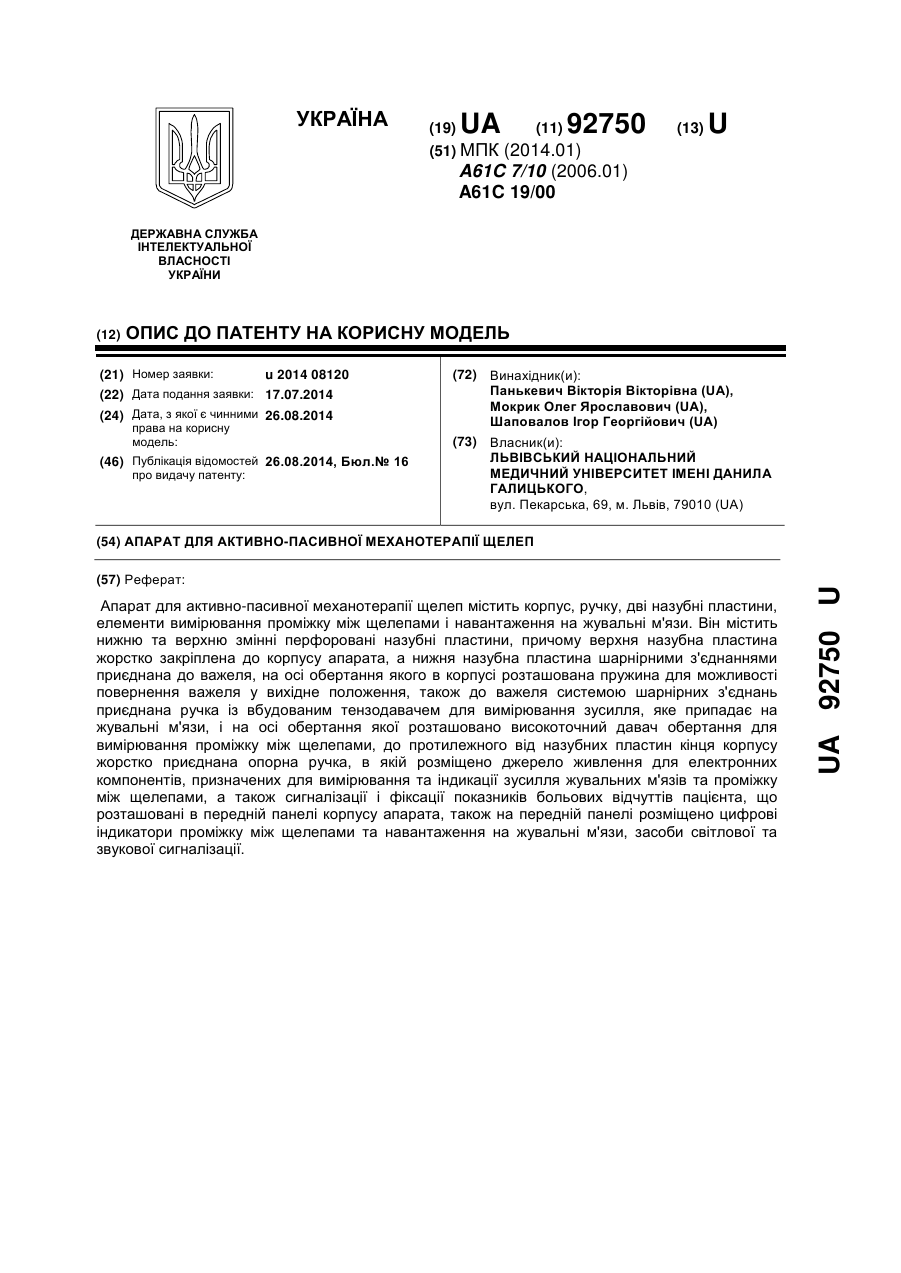
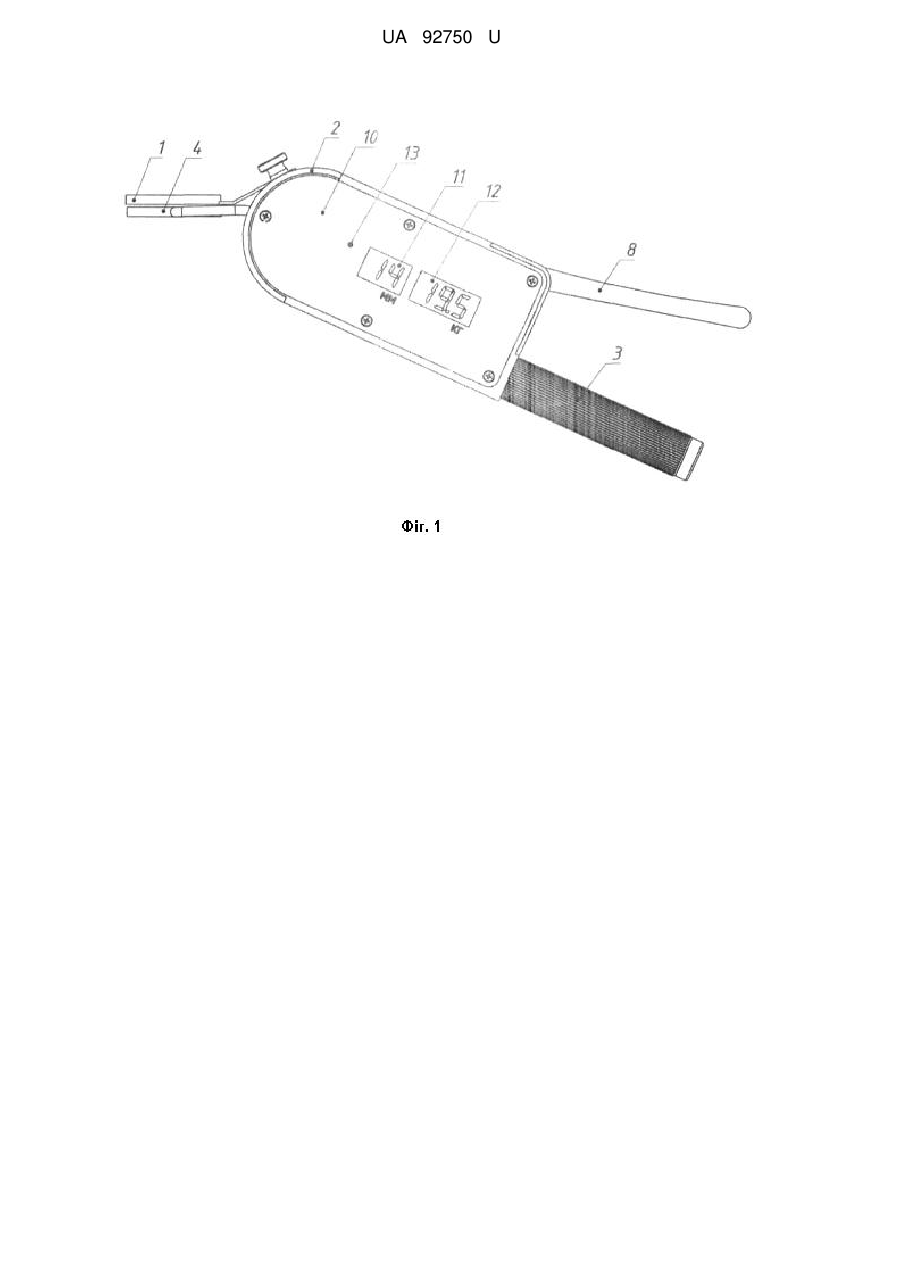
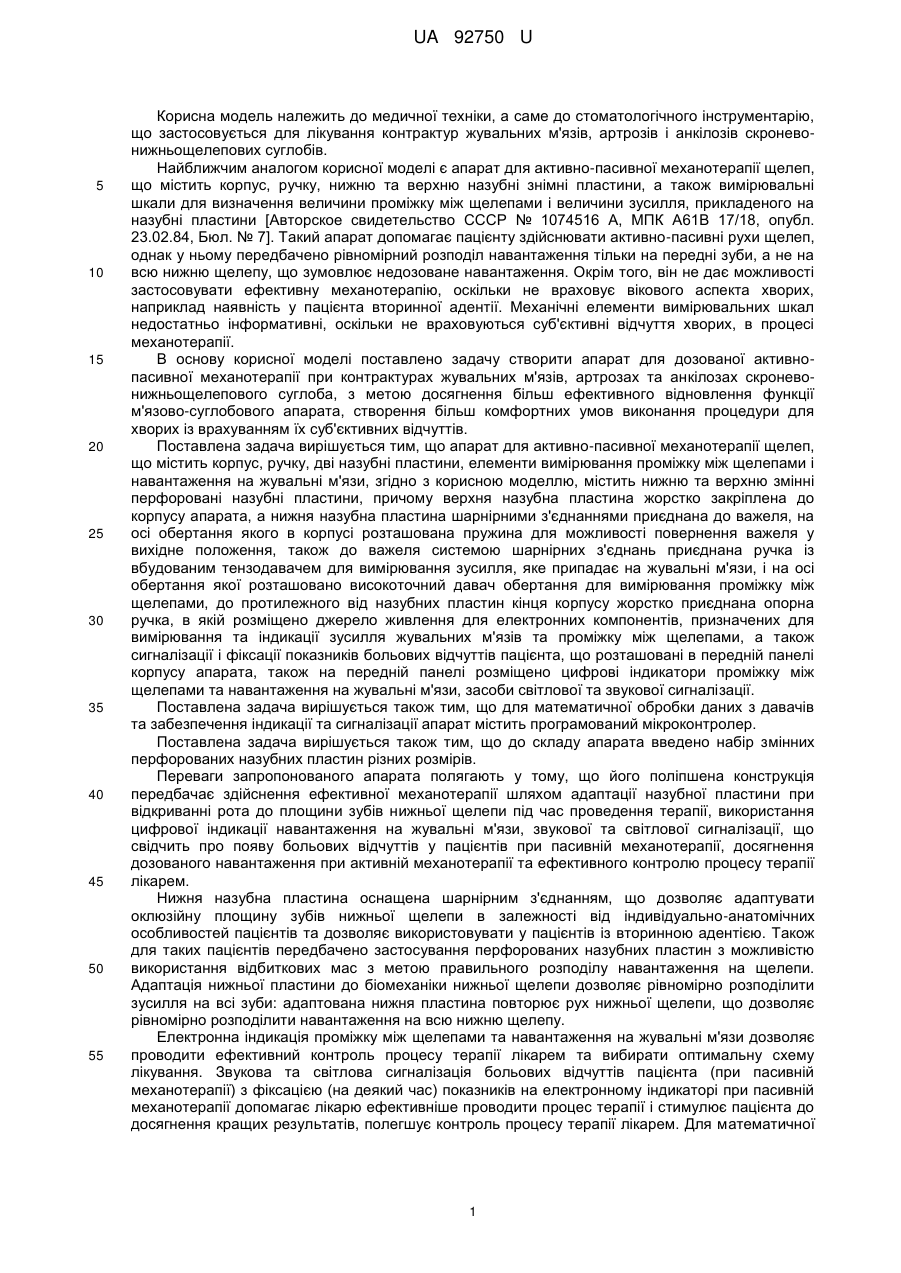
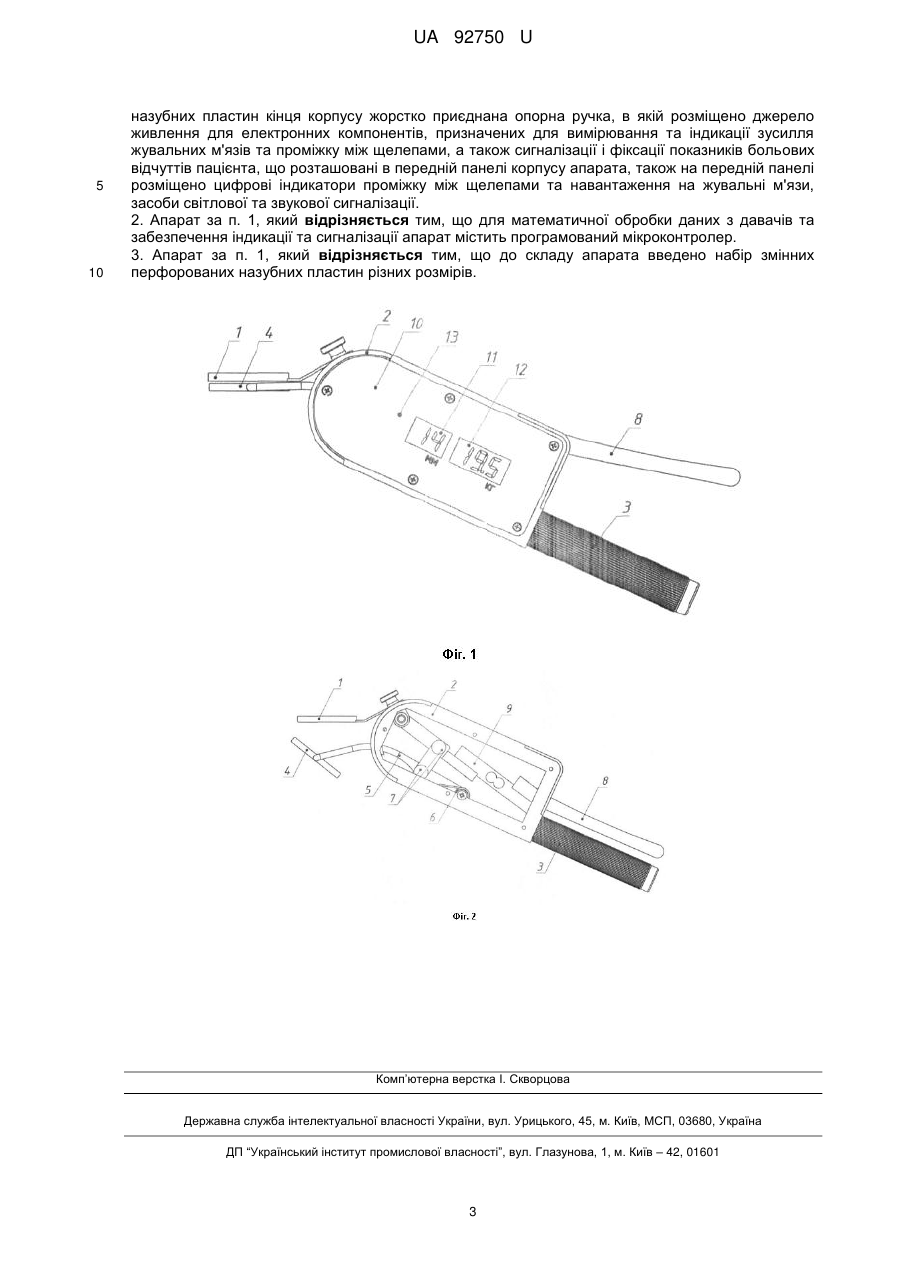
Реферат: Апарат для активно-пасивної механотерапії щелеп містить корпус, ручку, дві назубні пластини, елементи вимірювання проміжку між щелепами і навантаження на жувальні м'язи. Він містить нижню та верхню змінні перфоровані назубні пластини, причому верхня назубна пластина жорстко закріплена до корпусу апарата, а нижня назубна пластина шарнірними з'єднаннями приєднана до важеля, на осі обертання якого в корпусі розташована пружина для можливості повернення важеля у вихідне положення, також до важеля системою шарнірних з'єднань приєднана ручка із вбудованим тензодавачем для вимірювання зусилля, яке припадає на жувальні м'язи, і на осі обертання якої розташовано високоточний давач обертання для вимірювання проміжку між щелепами, до протилежного від назубних пластин кінця корпусу жорстко приєднана опорна ручка, в якій розміщено джерело живлення для електронних компонентів, призначених для вимірювання та індикації зусилля жувальних м'язів та проміжку між щелепами, а також сигналізації і фіксації показників больових відчуттів пацієнта, що розташовані в передній панелі корпусу апарата, також на передній панелі розміщено цифрові індикатори проміжку між щелепами та навантаження на жувальні м'язи, засоби світлової та звукової сигналізації. UA 92750 U (54) АПАРАТ ДЛЯ АКТИВНО-ПАСИВНОЇ МЕХАНОТЕРАПІЇ ЩЕЛЕП UA 92750 U UA 92750 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до медичної техніки, а саме до стоматологічного інструментарію, що застосовується для лікування контрактур жувальних м'язів, артрозів і анкілозів скроневонижньощелепових суглобів. Найближчим аналогом корисної моделі є апарат для активно-пасивної механотерапії щелеп, що містить корпус, ручку, нижню та верхню назубні знімні пластини, а також вимірювальні шкали для визначення величини проміжку між щелепами і величини зусилля, прикладеного на назубні пластини [Авторское свидетельство СССР № 1074516 А, МПК А61В 17/18, опубл. 23.02.84, Бюл. № 7]. Такий апарат допомагає пацієнту здійснювати активно-пасивні рухи щелеп, однак у ньому передбачено рівномірний розподіл навантаження тільки на передні зуби, а не на всю нижню щелепу, що зумовлює недозоване навантаження. Окрім того, він не дає можливості застосовувати ефективну механотерапію, оскільки не враховує вікового аспекта хворих, наприклад наявність у пацієнта вторинної адентії. Механічні елементи вимірювальних шкал недостатньо інформативні, оскільки не враховуються суб'єктивні відчуття хворих, в процесі механотерапії. В основу корисної моделі поставлено задачу створити апарат для дозованої активнопасивної механотерапії при контрактурах жувальних м'язів, артрозах та анкілозах скроневонижньощелепового суглоба, з метою досягнення більш ефективного відновлення функції м'язово-суглобового апарата, створення більш комфортних умов виконання процедури для хворих із врахуванням їх суб'єктивних відчуттів. Поставлена задача вирішується тим, що апарат для активно-пасивної механотерапії щелеп, що містить корпус, ручку, дві назубні пластини, елементи вимірювання проміжку між щелепами і навантаження на жувальні м'язи, згідно з корисною моделлю, містить нижню та верхню змінні перфоровані назубні пластини, причому верхня назубна пластина жорстко закріплена до корпусу апарата, а нижня назубна пластина шарнірними з'єднаннями приєднана до важеля, на осі обертання якого в корпусі розташована пружина для можливості повернення важеля у вихідне положення, також до важеля системою шарнірних з'єднань приєднана ручка із вбудованим тензодавачем для вимірювання зусилля, яке припадає на жувальні м'язи, і на осі обертання якої розташовано високоточний давач обертання для вимірювання проміжку між щелепами, до протилежного від назубних пластин кінця корпусу жорстко приєднана опорна ручка, в якій розміщено джерело живлення для електронних компонентів, призначених для вимірювання та індикації зусилля жувальних м'язів та проміжку між щелепами, а також сигналізації і фіксації показників больових відчуттів пацієнта, що розташовані в передній панелі корпусу апарата, також на передній панелі розміщено цифрові індикатори проміжку між щелепами та навантаження на жувальні м'язи, засоби світлової та звукової сигналізації. Поставлена задача вирішується також тим, що для математичної обробки даних з давачів та забезпечення індикації та сигналізації апарат містить програмований мікроконтролер. Поставлена задача вирішується також тим, що до складу апарата введено набір змінних перфорованих назубнихпластин різних розмірів. Переваги запропонованого апарата полягають у тому, що його поліпшена конструкція передбачає здійснення ефективної механотерапії шляхом адаптації назубної пластини при відкриванні рота до площини зубів нижньої щелепи під час проведення терапії, використання цифрової індикації навантаження на жувальні м'язи, звукової та світлової сигналізації, що свідчить про появу больових відчуттів у пацієнтів при пасивній механотерапії, досягнення дозованого навантаження при активній механотерапії та ефективного контролю процесу терапії лікарем. Нижня назубна пластина оснащена шарнірним з'єднанням, що дозволяє адаптувати оклюзійну площину зубів нижньої щелепи в залежності від індивідуально-анатомічних особливостей пацієнтів та дозволяє використовувати у пацієнтів із вторинною адентією. Також для таких пацієнтів передбачено застосування перфорованих назубних пластин з можливістю використання відбиткових мас з метою правильного розподілу навантаження на щелепи. Адаптація нижньої пластини до біомеханіки нижньої щелепи дозволяє рівномірно розподілити зусилля на всі зуби: адаптована нижня пластина повторює рух нижньої щелепи, що дозволяє рівномірно розподілити навантаження на всю нижню щелепу. Електронна індикація проміжку між щелепами та навантаження на жувальні м'язи дозволяє проводити ефективний контроль процесу терапії лікарем та вибирати оптимальну схему лікування. Звукова та світлова сигналізація больових відчуттів пацієнта (при пасивній механотерапії) з фіксацією (на деякий час) показників на електронному індикаторі при пасивній механотерапії допомагає лікарю ефективніше проводити процес терапії і стимулює пацієнта до досягнення кращих результатів, полегшує контроль процесу терапії лікарем. Для математичної 1 UA 92750 U 5 10 15 20 25 30 35 40 45 50 55 60 обробки даних з давачів та забезпечення індикації і сигналізації введено програмований мікроконтролер. Дозоване навантаження при активній механотерапії обумовлене навантаженням, яке здійснює пацієнт своєю рукою на ручку апарата, та може бути на межі больових відчуттів, що зменшує час відновлення жувальних м'язів, або навантаженням, яке здійснює своєю рукою лікар, контролюючи покази цифрових індикаторів. Апарат дозволяє застосовувати ефективну механотерапію, оскільки передбачає використання адаптованих до індивідуально-анатомічних особливостей пацієнтів змінних перфорованих назубних пластин різного розміру. Використання змінних назубних пластин різного розміру розширює коло пацієнтів, які зможуть користуватися пропонованим апаратом. Апарат комфортний та зручний у використанні. Корисна модель ілюструється схемами: на Фіг. 1 - загальний вигляд апарата для дозованої активно-пасивної механотерапії щелеп (у вихідному положенні), на Фіг. 2 - внутрішня будова апарата (в активному положенні). Апарат містить верхню змінну перфоровану назубну пластину 1, яка жорстко приєднана до корпусу 2, до якого з протилежного боку жорстко закріплена опорна ручка 3, в якій розміщено джерело живлення, наприклад, два елементи живлення типу АА (на схемі не вказані). Нижня змінна перфорована назубна пластина 4 шарнірними з'єднаннями (на схемі не вказані) прикріплена до важеля 5, на осі обертання якого насаджена пружина 6. Важіль 5 системою шарнірних з'єднань 7 сполучений з ручкою 8, на якій розміщено тензодавач 9. На передній панелі 10 апарату розміщено цифровий індикатор проміжку між щелепами 11 та цифровий індикатор навантаження на жувальні м'язи 12. Елементи світлової і звукової сигналізації та інші електронні компоненти на схемі не вказані. Апарат для дозованої активно-пасивної механотерапії щелеп функціонує таким чином. Пацієнт, тримаючи апарат однією рукою за опорну ручку 3 і, при потребі, підтримуючи другою рукою за корпус 2, встановлює в ротовій порожнині назубні пластини 1 і 4 в правильному та зручному положенні. Пасивну механотерапію здійснюють шляхом стискання рукою пацієнта рухомої ручки 8, яка містить тензодавач 9, в напрямку опорної ручки 3, яка через систему шарнірних з'єднань 7, важіль 5 і нижньої назубної пластини нижню назубну пластину 4 передає зусилля руки пацієнта або лікаря на щелепи. При появі больових відчуттів пацієнт зменшує зусилля натискання на ручку 8, спрацьовує світлова сигналізація 13 та звукова сигналізація (на схемі не вказана), розміщена на передній панелі 10 корпусу 2, а показники проміжку між щелепами (в міліметрах) та навантаження на жувальні м'язи (в кілограмах) залишаються незмінними на цифрових індикаторах 11 та 12 відповідно протягом деякого часу, наприклад, 10 с. На вісь обертання важеля 5 насаджена пружина 6 для його повернення у вихідне положення. Активна механотерапія здійснюється пацієнтом при стисканні щелепами назубних пластин 1 і 4, завдяки скороченню жувальних м'язів, та дозованою протидією, створеною зусиллям натиску руки хворого або лікаря на ручку 8, під контролем показів цифрових індикаторів 11 та 12. Для математичної обробки даних з давачів та забезпечення індикації та сигналізації в апарат введено програмований мікроконтролер. Адаптацію до індивідуально-анатомічних особливостей пацієнтів здійснюють шляхом підбору змінних перфорованих назубних пластин різних розмірів, що входять до складу апарату. Для функціонування електронних компонентів апарат оснащений двома елементами живлення, наприклад, типу АА, що розміщені в опорній ручці 3 (на ілюстраціях не показані). Запропонований апарат дозволяє проводити дозовану активно-пасивну механотерапію щелеп у хворих із контрактурами жувальних м'язів різного генезу з метою профілактики анкілозів та при безкровному лікуванні фіброзних анкілозів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Апарат для активно-пасивної механотерапії щелеп, що містить корпус, ручку, дві назубні пластини, елементи вимірювання проміжку між щелепами і навантаження на жувальні м'язи, який відрізняється тим, що містить нижню та верхню змінні перфоровані назубні пластини, причому верхня назубна пластина жорстко закріплена до корпусу апарата, а нижня назубна пластина шарнірними з'єднаннями приєднана до важеля, на осі обертання якого в корпусі розташована пружина для можливості повернення важеля у вихідне положення, також до важеля системою шарнірних з'єднань приєднана ручка із вбудованим тензодавачем для вимірювання зусилля, яке припадає на жувальні м'язи, і на осі обертання якої розташовано високоточний давач обертання для вимірювання проміжку між щелепами, до протилежного від 2 UA 92750 U 5 10 назубних пластин кінця корпусу жорстко приєднана опорна ручка, в якій розміщено джерело живлення для електронних компонентів, призначених для вимірювання та індикації зусилля жувальних м'язів та проміжку між щелепами, а також сигналізації і фіксації показників больових відчуттів пацієнта, що розташовані в передній панелі корпусу апарата, також на передній панелі розміщено цифрові індикатори проміжку між щелепами та навантаження на жувальні м'язи, засоби світлової та звукової сигналізації. 2. Апарат за п. 1, який відрізняється тим, що для математичної обробки даних з давачів та забезпечення індикації та сигналізації апарат містить програмований мікроконтролер. 3. Апарат за п. 1, який відрізняється тим, що до складу апарата введено набір змінних перфорованих назубних пластин різних розмірів. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюMokryk Oleh Yaroslavovych, Shapovalov Ihor Heorhiiovych
Автори російськоюМокрик Олег Ярославович, Шаповалов Игорь Георгиевич
МПК / Мітки
МПК: A61C 19/00, A61C 7/10
Мітки: апарат, механотерапії, активно-пасивної, щелеп
Код посилання
<a href="https://ua.patents.su/5-92750-aparat-dlya-aktivno-pasivno-mekhanoterapi-shhelep.html" target="_blank" rel="follow" title="База патентів України">Апарат для активно-пасивної механотерапії щелеп</a>
Апарат для розширення верхньої та нижньої щелеп
Номер патенту: 6878
Опубліковано: 16.05.2005
Автори: Дорошенко Світлана Іванівна, Тормахов Микола Миколайович, Довбенко Світлана Анатолівна, Борисенко Віктор Сергійович
МПК: A61C 7/00
Мітки: апарат, нижньої, щелеп, верхньої, розширення
Формула / Реферат:
Апарат для розширення верхньої та нижньої щелеп, що містить складений з двох частин базис, який має відбитки лінгвальних поверхонь зубного ряду та пружне півкільце, що з'єднує частини базису, який відрізняється тим, що він додатково містить пружні петлі, які замолочені кінцями в базисі і спираються на зуби нижньої щелепи нижче їх екватора.
Знімний двощелеповий ортодонтичний апарат для лікування дистального прикусу, ускладненого глибоким прикусом, а також скупченістю зубів у фронтальній ділянці верхньої та/або нижньої щелеп
Номер патенту: 10060
Опубліковано: 15.11.2005
Автори: Фліс Галина Петрівна, Фліс Петро Семенович
МПК: A61C 7/00
Мітки: ділянці, ускладненого, дистального, фронтальний, зубів, нижньої, апарат, також, лікування, верхньої, двощелеповий, прикусу, прикусом, знімний, глибоким, скупченістю, ортодонтичний, щелеп
Формула / Реферат:
1. Знімний двощелеповий ортодонтичний апарат для лікування дистального прикусу, ускладненого глибоким прикусом, а також скупченістю зубів у фронтальній ділянці верхньої і нижньої щелеп, що виготовлений у конструктивному прикусі і складається з рухомого фронтального сегмента, з'єднаного з бічними сегментами за допомогою омегоподібних петель, причому бічні сегменти також з'єднані між собою омегоподібною петлею і вестибулярною дугою, а на бічних...
Спосіб механотерапії колінного суглоба
Номер патенту: 29602
Опубліковано: 25.01.2008
Автори: Тимофєєв Микола Іванович, Мальований Віктор Олександрович, Сорокопуд Іван Олександрович, Воронко Андрій Анатолійович
МПК: A63B 23/04
Мітки: колінного, суглоба, спосіб, механотерапії
Формула / Реферат:
Спосіб механотерапії колінного суглоба, що включає процеси розтирання, масажу, розслаблення м'язів, зняття стресу, який відрізняється тим, що спочатку здійснюють розтирання, масаж, розслаблення м'язів, потім ногу з хворим колінним суглобом закріплюють в захоплювачі, за допомогою кисті руки і маятника на шарнірі пацієнт самостійно одночасно створює складні деформації вигину, крутіння і розтирання в колінному суглобі, змінює параметри режиму...
Ортодонтичний апарат
Номер патенту: 32676
Опубліковано: 15.02.2001
Автор: Новохацька Маргарита Вікторівна
МПК: A61C 7/00
Мітки: ортодонтичний, апарат
Формула / Реферат:
Ортодонтичний апарат, що включає базис із секторальними розпилами, капи на жувальні зуби та два гвинти, який відрізняється тим, що базис апарата виготовлений із прозорої пластмаси із змодельованою зубною поверхнею, а капи фіксовані кланерами Адамса на перших молярах і вкривають усі зуби.
Пристрій для механотерапії хребта
Номер патенту: 55403
Опубліковано: 15.04.2003
Автори: Петрушевський Іван Іванович, Латенко Світлана Борисівна, Канішевський Станислав Михайлович, Зеніна Ірина Володимирівна, Пасічна Тетяна Володимирівна
МПК: A61H 1/02, A63B 23/02, A63B 21/02
Мітки: пристрій, механотерапії, хребта
Формула / Реферат:
Пристрій для механотерапії хребта, що містить сидіння, спинку, головоутримувач з манжетами і зв’язаний з ними засіб активації кістково - м’язових структур хребта, який відрізняється тим, що сидіння встановлене на закріпленій на хрестовині забезпеченій зверху дугоподібною рамкою стійці з можливістю вертикального коливання за допомогою шарнірної установки його на насаджений на стійку відрізок труби з опорою на кронштейн з обоймою і закріплену...
Попередній патент: Спосіб диференційної діагностики артропатичного псоріазу
Наступний патент: Спосіб диференційованого покрокового терапевтичного ведення хворих з артропатичним псоріазом
Випадковий патент: Апарат для ретенції результатів ортодонтичного лікування