Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 95042
Опубліковано: 25.06.2011
Автори: Ткаченко Світлана Сергіївна, Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна, Коваль Антон Валерійович, Гура Євген Вікторович
Формула / Реферат
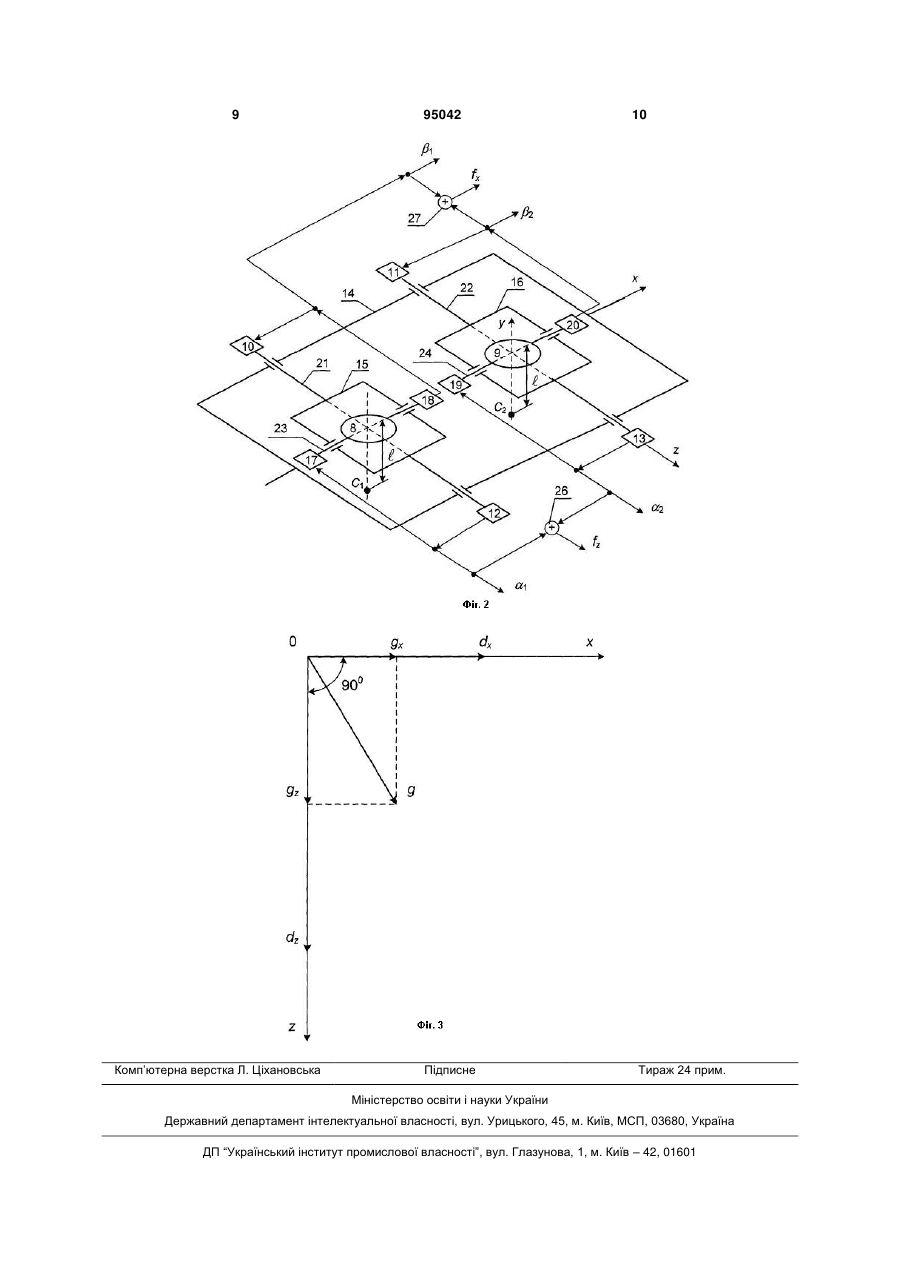
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до першого та другого входів бортової цифрової обчислювальної машини (БЦОМ) (4), і гіроскопічний гравіметр (1), який містить два тристепеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас зміщені на однакову відстань у один бік вздовж осей обертання, причому на осях (21, 22) зовнішньої рамки (14) тристепеневих гіроскопів (8, 9) розташовані перший та другий датчики кута (12, 13), а на осях (23, 24) внутрішніх рамок (15, 16) розташовані третій та четвертий датчики кута (18, 20), яка відрізняється тим, що додатково містить блок алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння (25) у складі БЦОМ (4), при цьому до першого, другого, третього та четвертого його входів підключені, відповідно, виходи першого, другого, третього та четвертого датчиків кута (12, 13, 18, 20).
Текст
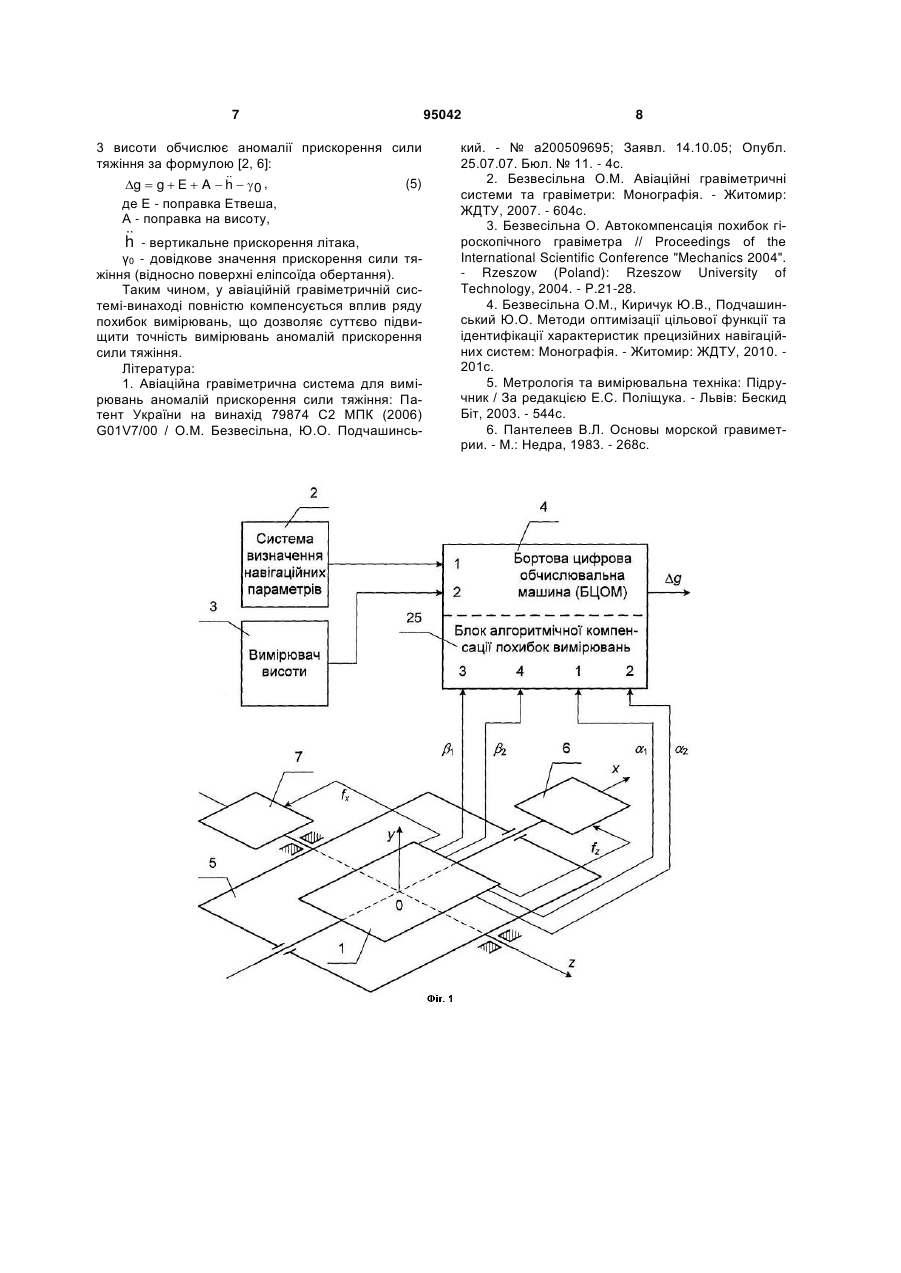
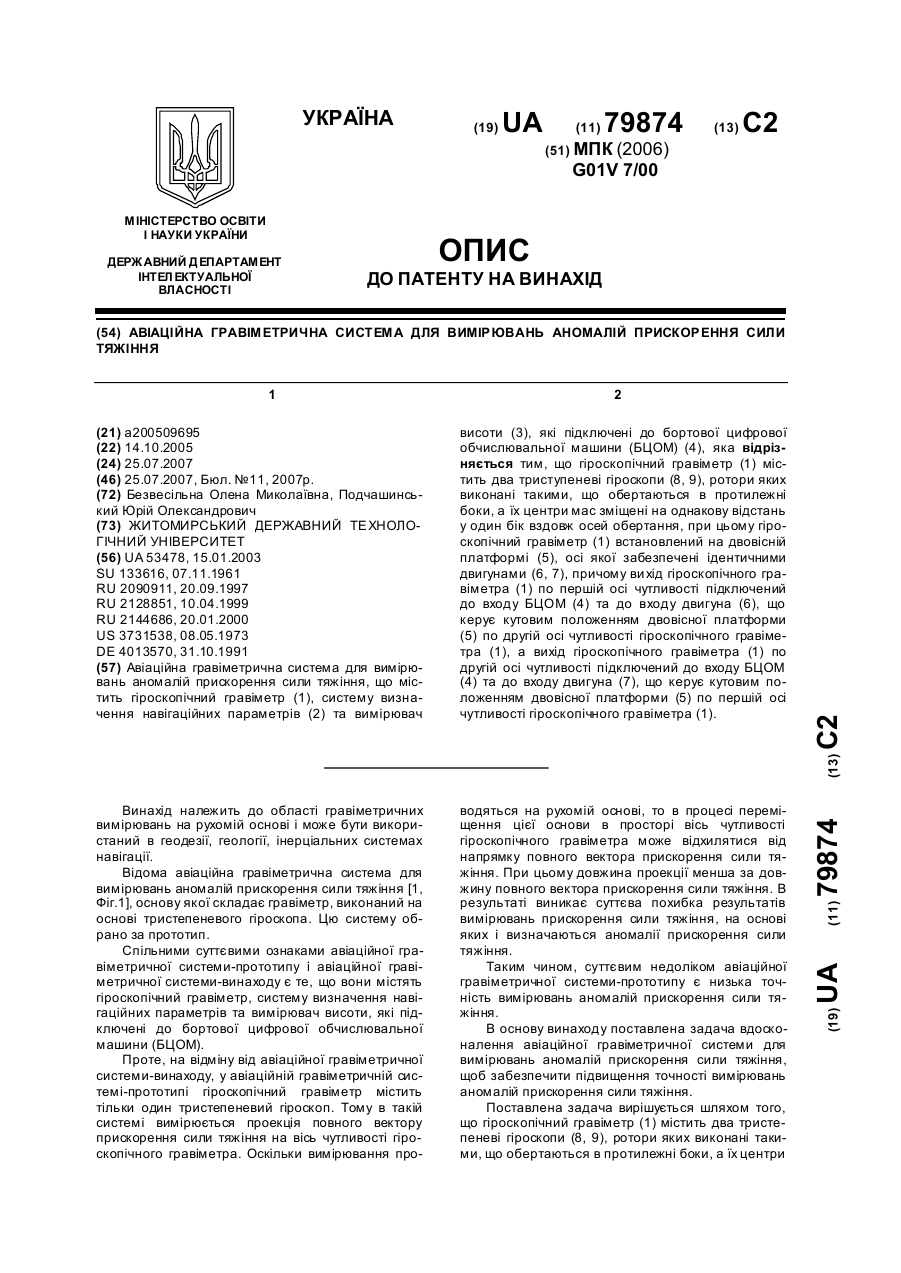
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить систему визначення навігаційних параметрів C2 1 3 моментів типу в'язкого тертя; неізохронністю прецесійних коливань тристепеневих гіроскопів; розбігом колової частоти прецесійних коливань, яка використовується в алгоритмах обчислень у БЦОМ, з коловою частотою прецесійних коливань тристепеневих гіроскопів [2]. В результаті додавання цих сигналів за допомогою суматорів похибки на виходах гіроскопічного гравіметра по обох осях чутливості суттєво збільшуються. Результати вимірювань аномалій прискорення сили тяжіння в авіаційній гравіметричній системіпрототипі формуються у БЦОМ на основі даних, що надійшли на входи БЦОМ з виходів гіроскопічного гравіметра по обох осях чутливості. При цьому в авіаційній гравіметричній системі-прототипі відсутні засоби компенсації похибок, що наявні на виходах гіроскопічного гравіметра по обох осях чутливості. Тому ці похибки суттєво знижують точність результатів вимірювань аномалій прискорення сили тяжіння. Таким чином, результати вимірювань аномалій прискорення сили тяжіння, що отримані в авіаційній гравіметричній системі-прототипі, мають недостатню точність. В основу винаходу поставлена задача удосконалення авіаційної гравіметричної системи для вимірювань аномалій прискорення сили тяжіння, щоб забезпечити підвищення точності вимірювань аномалій прискорення сили тяжіння. Поставлена задача вирішується шляхом того, що до складу БЦОМ додатково введений блок алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння, до першого, другого, третього та четвертого входів якого підключено виходи першого, другого, третього та четвертого датчиків кута відповідно. Сигнали 1, 2 з виходів першого та другого датчиків кута та сигнали 1, 2 з виходів третього та четвертого датчиків кута містять систематичні похибки Rіj (і=1, ..., 5 та визначає номер складової частини похибки, j=1, ..., 4 та визначає сигнал 1, 2, 1 або 2, на який діє дана похибка). Як відомо [2], ці похибки обумовлені дією на гіроскопічний гравіметр таких факторів: 1. R1j - нелінійні викривлення траєкторій руху тристепеневих гіроскопів; 2. R2j - нерівність нуля показника згасання прецесійних коливань через дію на тристепеневі гіроскопи моментів типу в'язкого тертя; 3. R3j - неізохронність прецесійних коливань тристепеневих гіроскопів; 4. R4j - розбіг колової частоти прецесійних коливань, яка використовується в алгоритмах обчислень у БЦОМ, з коловою частотою прецесійних коливань тристепеневих гіроскопів; 5. R5j - завади, що викривляють траєкторії руху тристепеневих гіроскопів та приводять до виникнення систематичної складової частини похибки. В блоці алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння виконується розрахунок систематичних похибок вимірювань Rij на основі підходів, викладених в [3, 4]. Далі блок алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння виконує 95042 4 компенсацію систематичних похибок шляхом їх виключення за формулою [5]: * 1 1 Ri1, * 2 Ri2, 2 i i (1) * R , * R , 1 1 i3 2 2 i4 i i Таким чином, в авіаційній гравіметричній системі-винаході забезпечується суттєве підвищення точності вимірювань аномалій прискорення сили тяжіння. Суть винаходу пояснюється кресленнями. Перелік креслень: фіг.1 - структурна схема авіаційної гравіметричної системи для вимірювань аномалій прискорення сили тяжіння; фіг.2 - структурна схема гіроскопічного гравіметра; фіг.3 - схема обчислення повного вектора прискорення сили тяжіння. Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння (фіг.1) містить гіроскопічний гравіметр 1, систему 2 визначення навігаційних параметрів та вимірювач 3 висоти, які підключені до бортової цифрової обчислювальної машини (БЦОМ) 4, а також двовісну платформу 5, осі якої забезпечені ідентичними двигунами 6,7. Гіроскопічний гравіметр 1 містить два тристепеневі гіроскопи 8, 9, ротори яких виконані таким чином, що обертаються в протилежні боки, а їх центри мас С1 і С2 зміщені на однакову відстань l у один бік вздовж осей обертання. Тристепеневий гіроскоп 8 розташований у внутрішній рамці 15 та зовнішній рамці 14. На осі 23 внутрішньої рамки 15 розташований третій датчик 18 кута. До виходу третього датчика 18 кута підключений датчик 10 моменту, розташований на осі 21 зовнішньої рамки 14. На осі 21 зовнішньої рамки 14 розташований перший датчик 12 кута. До виходу першого датчика 12 кута підключено датчик 17 моменту, розташований на осі 23 внутрішньої рамки 15. Тристепеневий гіроскоп 9 розташований у внутрішній рамці 16 та зовнішній рамці 14. На осі 24 внутрішньої рамки 16 розташований четвертий датчик 20 кута. До виходу четвертого датчика 20 кута підключений датчик 11 моменту, розташований на осі 22 зовнішньої рамки 14. На осі 22 зовнішньої рамки 14 розташований другий датчик 13 кута. До виходу другого датчика 13 кута підключено датчик 19 моменту, розташований на осі 24 внутрішньої рамки 16. Виходи першого та другого датчиків 12, 13 кута підключені до входів першого суматора 26, вихід якого є виходом гіроскопічного гравіметра 1 по першій осі чутливості (сигнал fz). Виходи третього та четвертого датчиків 18, 20 кута підключені до входів другого суматора 27, вихід якого є виходом гіроскопічного гравіметра 1 по другій осі чутливості (сигнал fх). Перша вісь чутливості гіроскопічного гравіметра 1 (вісь Oz) співпадає з напрямком осей 21 і 22 зовнішньої рамки 14 тристепеневих гіроскопів 8 і 9. Друга вісь чутливості гіроскопічного гравіметра 1 5 (вісь Ох) співпадає з напрямком осей 23 і 24 внутрішніх рамок 15 і 16 тристепеневих гіроскопів 8 і 9. Гіроскопічний гравіметр 1 встановлений на двовісній платформі 5, осі якої забезпечені ідентичними двигунами 6, 7. Вихід гіроскопічного гравіметра 1 по першій осі чутливості (сигнал fz) підключений до входу другого двигуна 6, що керує кутовим положенням двовісної платформи 5 по другій осі чутливості гіроскопічного гравіметра 1. Вихід гіроскопічного гравіметра 1 по другій осі чутливості (сигнал fх) підключений до входу першого двигуна 7, що керує кутовим положенням двовісної платформи 5 по першій осі чутливості гіроскопічного гравіметра 1. До складу БЦОМ 4 входить блок 25 алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння. До першого, другого, третього та четвертого входів цього блока підключено виходи першого, другого, третього та четвертого датчиків 12, 13, 18, 20 кута відповідно. Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння працює таким чином. Складова частина gx прискорення сили тяжіння (проекція на вісь Ох) спрямована вздовж осей 23 і 24 внутрішніх рамок 15 і 16 тристепеневих гіроскопів 8 і 9. Останні почнуть повертатись відносно осей 23 і 24 внутрішніх рамок 15 і 16 під дією маятникового моменту mgxl, спрямованого по осях 21 і 22 зовнішньої рамки 14 (m - додаткова маса, розташована на відстані l від перерізу осей Ох і Oz обох тристепеневих гіроскопів 8 і 9 вздовж осей обертання роторів цих гіроскопів). Обертання тристепеневих гіроскопів 8 і 9 під дією маятникового моменту mgxl приводить до появи електричних сигналів на виходах третього та четвертого датчиків 18 і 20 кута, розташованих на осях 23 і 24 внутрішніх рамок 15 і 16. Виходи третього та четвертого датчиків 18 і 20 кута підключені до входів датчиків 10 і 11 моменту, розташованих на осях 21 і 22 зовнішньої рамки 14. Датчики 10 і 11 моменту створюють моменти, що компенсують маятникові моменти mgxl. Складова частина gz прискорення сили тяжіння (проекція на вісь Oz) спрямована вздовж осей 21 і 22 зовнішньої рамки 14 тристепеневих гіроскопів 8 і 9. Останні почнуть повертатись відносно осей 21 і 22 зовнішньої рамки 14 під дією маятникового моменту mgzl, спрямованого по осях 23 і 24 внутрішніх рамок 15 і 16. Обертання тристепеневих гіроскопів 8 і 9 під дією маятникового моменту mgzl приводить до появи електричних сигналів на виходах першого та другого датчиків 12 і 13 кута, розташованих на осях 21 і 22 зовнішньої рамки 14. Виходи першого та другого датчиків 12 і 13 кута підключені до входів датчиків 17 і 19 моменту, розташованих на осях 23 і 24 внутрішніх рамок 15 і 16. Датчики 17 і 19 моменту створюють моменти, що компенсують маятникові моменти mgzl. У гіроскопічному гравіметрі 1, що містить два однакових тристепеневих гіроскопи 8 і 9, формуються два вихідні сигнали fz і fx по першій і другій осях чутливості. Ці сигнали формуються за допомогою суматорів 26 і 27. Перший сигнал є сумою вихідних сигналів з першого та другого датчиків 95042 6 12, 13 кута. Другий сигнал є сумою вихідних сигналів з третього і четвертого датчиків 18, 20 кута. Ці сигнали являють собою проекції повного вектора прискорення сили тяжіння на першу і другу осі чутливості гіроскопічного гравіметра 1. Вихідні сигнали fz і fx гіроскопічного гравіметра 1 подаються на входи двигунів 6 і 7. Двигуни 6 і 7 керують кутовим положенням двовісної платформи 5, на якій встановлений гіроскопічний гравіметр 1. З гіроскопічного гравіметра 1 на входи блока 25 алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння надходять чотири сигнали. Це сигнали 1, 2 з виходів першого та другого датчиків 12, 13 кута та сигнали 1, 2 з виходів третього та четвертого датчиків 18, 20 кута. В блоці 25 алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння виконується розрахунок систематичних похибок вимірювань Rij на основі підходів, викладених в [3, 4]. Цей блок також виконує компенсацію систематичних похибок вимірювань Rij шляхом їх виключення за формулою (1). Далі у БЦОМ 4 відбувається попарне додавання сигналів, отриманих від блока 25 алгоритмічної компенсації похибок вимірювань прискорення сили тяжіння, згідно з формулою: * * (2) * 1 * , * 1 * , 2 2 При цьому компенсується ще одна складова похибки вимірювань аномалій прискорення сили тяжіння, що обумовлена впливом кутової швидкості обертання Землі на гіроскопічний гравіметр 1. Це пояснюється тим, що ротори тристепеневих гіроскопів 8, 9 обертаються в протилежні боки, а їх центри мас зміщені на однакову відстань у один бік вздовж осей обертання. В цьому випадку вказана складова частина похибки має однакове абсолютне значення та протилежні знаки у парах * * сигналів 1 і * , 1 і * відповідно (див. [2]). 2 2 При додаванні сигналів за формулами (2) ця складова похибки взаємно компенсується. Далі у БЦОМ 4 на основі сигналів * і * об числюються сигнали dz і dx, що відповідають подвоєним значенням проекцій gz і gx повного вектора прискорення сили тяжіння на осі Oz і Ох: (3) d z k z * 2g z , d x k x * 2g x , де kz і kх - коефіцієнти пропорційності, що визначаються шляхом розрахунку [2] на основі конструктивних даних гіроскопічного гравіметра 1. БЦОМ 4 на основі сигналів dz і dx обчислює повний вектор g прискорення сили тяжіння за формулою (відповідно до фіг.3): 2 2 d d (4) g z x , 2 2 У БЦОМ 4 також подаються вихідні сигнали від системи 2 визначення навігаційних параметрів і вихідний сигнал від вимірювача 3 висоти. БЦОМ 4 на основі значень повного вектора сили тяжіння і даних, що надходять від системи 2 визначення навігаційних параметрів і вимірювача 7 3 висоти обчислює аномалії прискорення сили тяжіння за формулою [2, 6]: (5) g g E A h 0 , де Е - поправка Етвеша, А - поправка на висоту, h - вертикальне прискорення літака, γ0 - довідкове значення прискорення сили тяжіння (відносно поверхні еліпсоїда обертання). Таким чином, у авіаційній гравіметричній системі-винаході повністю компенсується вплив ряду похибок вимірювань, що дозволяє суттєво підвищити точність вимірювань аномалій прискорення сили тяжіння. Література: 1. Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння: Патент України на винахід 79874 С2 МПК (2006) G01V7/00 / О.М. Безвесільна, Ю.О. Подчашинсь 95042 8 кий. - № а200509695; Заявл. 14.10.05; Опубл. 25.07.07. Бюл. № 11. - 4с. 2. Безвесільна О.М. Авіаційні гравіметричні системи та гравіметри: Монографія. - Житомир: ЖДТУ, 2007. - 604с. 3. Безвесільна О. Автокомпенсація похибок гіроскопічного гравіметра // Proceedings of the International Scientific Conference "Mechanics 2004". - Rzeszow (Poland): Rzeszow University of Technology, 2004. - P.21-28. 4. Безвесільна О.М., Киричук Ю.В., Подчашинський Ю.О. Методи оптимізації цільової функції та ідентифікації характеристик прецизійних навігаційних систем: Монографія. - Житомир: ЖДТУ, 2010. 201с. 5. Метрологія та вимірювальна техніка: Підручник / За редакцією Е.С. Поліщука. - Львів: Бескид Біт, 2003. - 544с. 6. Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983. - 268с. 9 Комп’ютерна верстка Л. Ціхановська 95042 Підписне 10 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAviation gravimetric system for measurement of abnormalities of acceleration of gravity
Автори англійськоюBezvesilna Olena Mykolaivna, Podchashynskyi Yurii Oleksandrovych, Tkachenko Svitlana Serhiivna, Koval Anton Valeriiovych, Hura Yevhen Viktorovych
Назва патенту російськоюАвиационная гравиметрическая система для измерения аномалий ускорения силы тяжести
Автори російськоюБезвесильна Елена Николаевна, Подчашинский Юрий Александрович, Ткаченко Светлана Сергеевна, Коваль Антон Валериевич, Гура Евгений Викторович
МПК / Мітки
МПК: G01V 7/06
Мітки: вимірювань, аномалій, гравіметрична, сили, авіаційна, тяжіння, прискорення, система
Код посилання
<a href="https://ua.patents.su/5-95042-aviacijjna-gravimetrichna-sistema-dlya-vimiryuvan-anomalijj-priskorennya-sili-tyazhinnya.html" target="_blank" rel="follow" title="База патентів України">Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння</a>
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: вимірювань, прискорення, авіаційна, система, тяжіння, аномалій, гравіметрична, сили
Формула / Реферат:
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас...
Спосіб вимірювання аномалій прискорень сили тяжіння
Номер патенту: 45567
Опубліковано: 10.11.2009
Автори: Гнатенко Нона Валентинівна, Ткаченко Світлана Сергіївна, Безвесільна Олена Миколаївна, Киричук Юрій Володимирович
МПК: G01V 7/00
Мітки: прискорень, вимірювання, аномалій, тяжіння, сили, спосіб
Формула / Реферат:
Спосіб вимірювання аномалій прискорень сили тяжіння, що включає вимірювання навігаційних параметрів, значення висоти та питомої сили тяжіння за допомогою гіроскопічного гравіметра, який встановлено на гіростабілізованій платформі, яка під час обертання в просторі приймає таке положення, що напрямок її вертикальної осі збігається з напрямком місцевої вертикалі на основі показань акселерометрів, які входять до її складу, і на основі вхідних...
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 82763
Опубліковано: 12.05.2008
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: прискорення, тяжіння, стиснення, спосіб, аномалії, сили, інформації, вимірювальної, гравіметричної
Формула / Реферат:
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає стиснення двовимірного масиву цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, який відрізняється тим, що формування масиву здійснюють шляхом занесення в нього цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння з урахуванням прив'язки до...
Спосіб оптичного вимірювання величини прискорення сили тяжіння
Номер патенту: 33397
Опубліковано: 15.02.2001
Автори: Бурачек Всеволод Германович, Гніденко Микола Володимирович
МПК: G01N 13/10, G01N 13/00
Мітки: тяжіння, оптичного, величини, прискорення, спосіб, вимірювання, сили
Текст:
...ge = 1/12G * ке, звідки ке = & * і2е; (7) Де ge - прискорення сили тяжіння на пункті з відомим значенням величини прискорення сили тяжіння; і 1е - відстань між елементами смуги поглинання на пункті з відомим значенням величини прискорення сили тяжіння. На робочому пункті визначають величину прискорення сили тяжіння за формулою: gp=l/l P 2 * k c , Де gp - прискорення сили тяжіння на робочому пункті ; 1 Р - відстань між елементами...
Спосіб фільтрації гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 89816
Опубліковано: 10.03.2010
Автори: Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна
МПК: G01V 7/00
Мітки: вимірювальної, спосіб, тяжіння, сили, фільтрації, аномалії, інформації, прискорення, гравіметричної
Формула / Реферат:
Спосіб фільтрації гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає фільтрацію вихідного сигналу гравіметра з урахуванням розподілу спектральної щільності корисного сигналу про аномалії прискорення сили тяжіння та спектральної щільності завад, що діють на гравіметр, який відрізняється тим, що з вихідного сигналу гравіметра формують двовимірний масив цифрових відліків гравіметричної вимірювальної...
Попередній патент: Спосіб визначення поперечного переміщення віддаленого об’єкта і пристрій для його здійснення
Наступний патент: Спосіб отримання зміцненого покриття на кольорових сплавах
Випадковий патент: Спосіб одержання сорбційного терморозщепленого графіту