Спосіб визначення геометричних розмірів мікромасштабних прозорих об’єктів
Номер патенту: 95615
Опубліковано: 25.12.2014
Автори: Качур Наталія Володимирівна, Маркіна Ольга Миколаївна, Маслов Володимир Петрович

Формула / Реферат
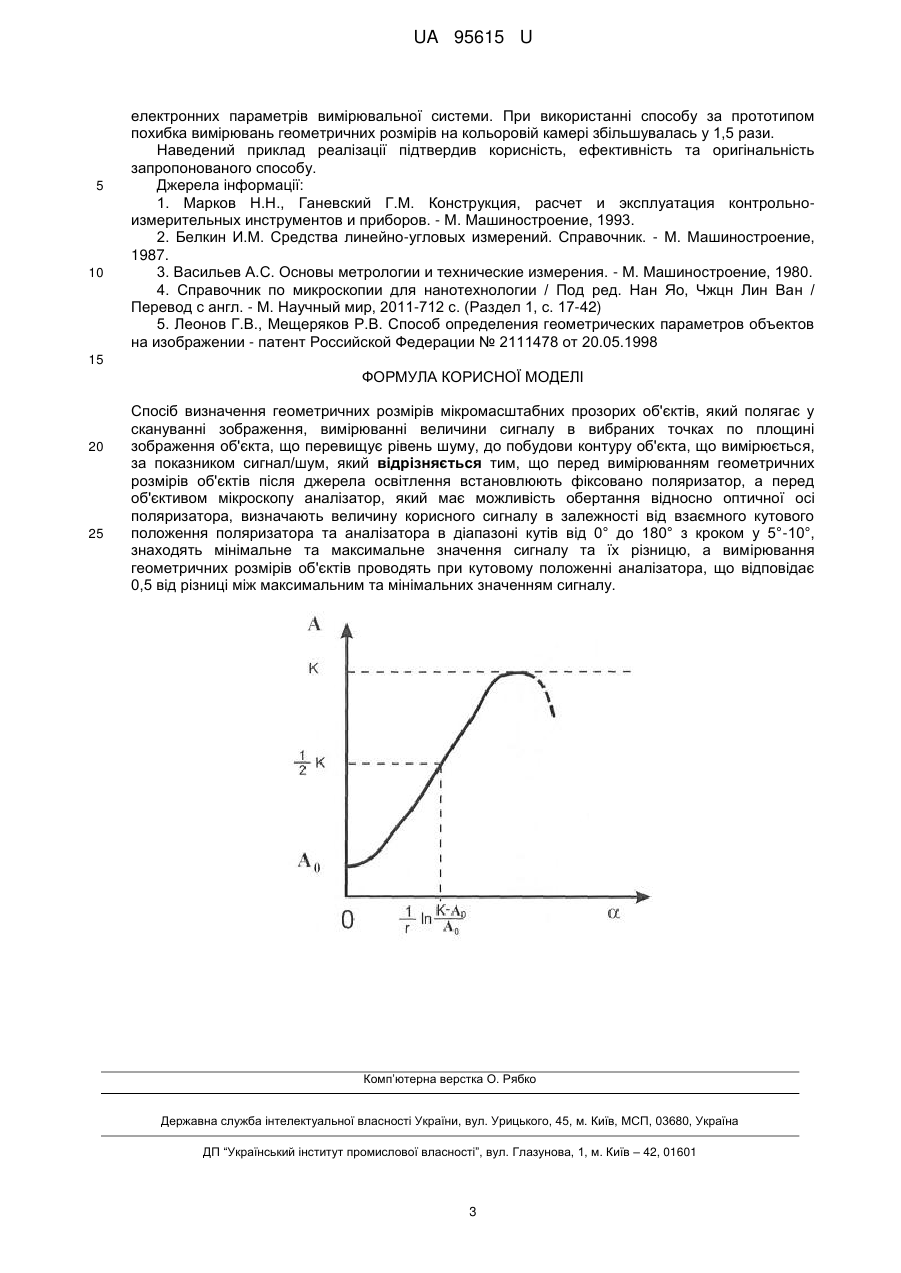
Спосіб визначення геометричних розмірів мікромасштабних прозорих об'єктів, який полягає у скануванні зображення, вимірюванні величини сигналу в вибраних точках по площині зображення об'єкта, що перевищує рівень шуму, до побудови контуру об'єкта, що вимірюється, за показником сигнал/шум, який відрізняється тим, що перед вимірюванням геометричних розмірів об'єктів після джерела освітлення встановлюють фіксовано поляризатор, а перед об'єктивом мікроскопу аналізатор, який має можливість обертання відносно оптичної осі поляризатора, визначають величину корисного сигналу в залежності від взаємного кутового положення поляризатора та аналізатора в діапазоні кутів від 0° до 180° з кроком у 5°-10°, знаходять мінімальне та максимальне значення сигналу та їх різницю, а вимірювання геометричних розмірів об'єктів проводять при кутовому положенні аналізатора, що відповідає 0,5 від різниці між максимальним та мінімальних значенням сигналу.
Текст
Реферат: Спосіб визначення геометричних розмірів мікромасштабних прозорих об'єктів полягає у скануванні зображення, вимірюванні величини сигналу в вибраних точках по площині зображення об'єкта, що перевищує рівень шуму, до побудови контуру об'єкта, що вимірюється, за показником сигнал/шум. Перед вимірюванням геометричних розмірів об'єктів після джерела освітлення встановлюють фіксовано поляризатор. Перед об'єктивом мікроскопу аналізатор, який має можливість обертання відносно оптичної осі поляризатора. Визначають величину корисного сигналу в залежності від взаємного кутового положення поляризатора та аналізатора в діапазоні кутів від 0° до 180° з кроком у 5°-10°, знаходять мінімальне та максимальне значення сигналу та їх різницю. Вимірювання геометричних розмірів об'єктів проводять при кутовому положенні аналізатора, що відповідає 0,5 від різниці між максимальним та мінімальних значенням сигналу. UA 95615 U (12) UA 95615 U UA 95615 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до техніки вимірювання геометричних розмірів мікрооб'єктів і може бути використана у машино- та приладобудівельній промисловості, а також у науководослідних роботах, у медицині та біології. Найбільш поширеним методом вимірювання геометричних розмірів є контактні методи, наприклад, з використанням мікрометра [1-3]. Ці методи достатньо прості, не вимагають складних розрахунків і тому, мають широкий вжиток на підприємствах. Але контактні методи не завжди можна використовувати, тому що є великий клас об'єктів, зокрема в медицині, біології, оптико-електронному приладобудуванні, де контакт з об'єктом повинен бути виключений через те, що призводить до руйнування об'єкту або змін його фізичних властивостей. Відомо також, що до безконтактних методів вимірювання розмірів належить оптична мікроскопія [4], яка вирішує багато задач з проблеми вимірювання об'єктів у медицині, біології та нанотехнологіях. Подальша автоматизація та стандартизація процесу вимірювання на оптичних мікроскопах пов'язана з науковим напрямком інформаційних технологій, зокрема з вдосконаленням способів оптичного вимірювання геометричних з використанням відеокамер з ПЗЗ матрицями. Найбільш близьким технічним рішенням, прийнятим за прототип, є спосіб визначення геометричних параметрів об'єктів на зображенні [5], який полягає у скануванні зображення, вимірюванні величини сигналу в вибраних точках по площині зображення об'єкта, що перевищує рівень шуму, до побудови контуру об'єкта, що вимірюється, за показником сигнал/шум. Такий метод дозволяє зменшити похибку та спростити операцію вимірювання. Недоліком прототипу є те, що різні мікроскопи та ПЗЗ матриці при об'єднанні у одну вимірювальну систему мають різний рівень шуму та відношення сигнал/шум, тому запропонований спосіб має обмеження на використання різних типів мікроскопів та ПЗЗ матриць. Задачею запропонованої корисної моделі є створення способу з високим ступенем універсальності, який зніматиме обмеження на використання різних типів мікроскопів та ПЗЗ матриць. Поставлена задача вирішується тим, що пропонується спосіб визначення геометричних розмірів мікромасштабних прозорих об'єктів, який полягає у скануванні зображення, вимірюванні величини сигналу в вибраних точках по площині зображення об'єкта, що перевищує рівень шуму, до побудови контуру об'єкта, що вимірюється, за показником сигнал/шум, згідно з корисною моделлю, перед вимірюванням геометричних розмірів об'єктів після джерела освітлення встановлюють фіксовано поляризатор, а перед об'єктивом мікроскопу аналізатор, який має можливість обертання відносно оптичної осі поляризатора, визначають величину корисного сигналу в залежності від взаємного кутового положення поляризатора та аналізатора в діапазоні кутів від 0° до 180° з кроком у 5°-10°, знаходять мінімальне та максимальне значення сигналу та їх різницю, а вимірювання геометричних розмірів об'єктів проводять при кутовому положенні аналізатора, що відповідає 0,5 від різниці між максимальним та мінімальних значенням сигналу. Кутовий крок 5°-10° вибрано тому, що при значеннях менше 5° збільшується час вимірювань при незначному підвищенні точності визначення рівня шумів та максимального корисного сигналу, а збільшення більше 10° збільшує похибку визначення рівня шумів та максимального корисного сигналу. Вимірювання геометричних розмірів об'єкту при кутовому положенні аналізатора, що відповідає 0,5 від різниці між максимальним та мінімальних значенням сигналу пояснюється тим, що розміри об'єкту визначаються при сигналі, що перевищує рівень шумів, але має менші значення ніж сигнал насичення. Пояснення цієї ознаки наведено на кресленні залежності корисного сигналу від кутового положення аналізатора відносно поляризатора, де максимальний сигнал А при паралельному взаємному положенні поляризатора та аналізатора визначено як К, а мінімальний сигнал (рівень шумів) при перпендикулярному взаємному положенні поляризатора та аналізатора, як А0. Розглянемо яке значення кутового положення відповідатиме значенню корисного сигналу 1 A K. 2 Логічно припустити, що на лінійній пропорційній ділянці швидкість зміни корисного сигналу А від кутового положення буде пропорційне контрасту r (кут нахилу цієї лінійної ділянки, що характеризує вибрану оптико-електронну систему вимірювання), самому значенню корисного сигналу А та відношенню сигнал/шум, тобто: 1 UA 95615 U 5 dA K A0 (1) rA d K після перетворення: K dA rd (2) A K A 0 та урахування 1 1 1 (3) AK A 0 KA KK A 0 маємо: 1 1 (4) A K A dA rd 0 після інтегрування 1 1 dA rd B (5) K A0 ln A lnK A0 r ln b ; ln b B const (6) A 10 A 0 (7) A Ber 0 ; A A0 ; B K A0 K A0 A BKe r ; A0 BK ; (8) B er 0 K ; B ln K A 0 . (9) A A0 1 expB r 1 Be r Отримане рівняння дозволяє визначити кут, при якому корисний сигнал дорівнює 15 20 25 30 35 40 1 K, а 2 саме, величина цього кута дорівнює (10) 1 K A 0 . (10) ln r A0 І цілком визначається характеристиками конкретної оптико-електронної системи контрастністю та добротністю. Позитивний ефект запропонованого технічного рішення полягає в тому, що спосіб за запропонованою корисною моделлю дозволяє зняти обмеження при використанні різних типів мікроскопів та відеокамер з ПЗЗ матрицями і тим самим забезпечує універсальність способу вимірювання. Новизна запропонованої корисної моделі обумовлена сукупністю відомих та вперше запропонованих складових та ознак цього технічного рішення. Приклад реалізації. Як мікроскоп використовувався мікроскоп для біологічних досліджень типу БИОЛАМ з окуляром х10, який дозволяв проводити контроль зразків на проходження світла. Телевізійна камера цифрова Novus-130 ВН з ПЗЗ - матрицею Sony 1/3 дюйми, числом ефективних пікселів 752×582 встановлювалась безпосередньо на окуляр мікроскопу. Як тест-об'єкт брали об'єкт-мікрометр за ГОСТ 7513-75 типу ОМП для світла, що проходить крізь нього (на просвіт). Відстань між штрихами дорівнювала 0,01 мм. Як поляризатор та аналізатор використовували плівкові полімерні лінійні поляризатори нанесені на скляні пластини. Спочатку перевірявся такий тест-об'єкт запропонованим способом і отримані значення використовувались як еталонні, а потім вимірювали розміри залишкових подряпин та дефектів від обробки на полірованій оптичній деталі. Після цього аналогічні дослідження провели на цьому ж мікроскопі, але з використанням іншого окуляра х20. Потім камеру Novus-130 ВН замінили на камеру кольорового зображення Novus NVC-401С з ефективним числом пікселів 976×582. Аналогічні випробування було проведено за способом, який відповідав прототипу на цьому ж обладнанні. Порівняльні дані показали, що запропонований спосіб дозволяє отримати одну й ту саму точність вимірювання геометричних розмірів об'єкту (подряпина) при зміні оптичних та 2 UA 95615 U 5 10 електронних параметрів вимірювальної системи. При використанні способу за прототипом похибка вимірювань геометричних розмірів на кольоровій камері збільшувалась у 1,5 рази. Наведений приклад реалізації підтвердив корисність, ефективність та оригінальність запропонованого способу. Джерела інформації: 1. Марков Н.Н., Ганевский Г.М. Конструкция, расчет и эксплуатация контрольноизмерительных инструментов и приборов. - М. Машиностроение, 1993. 2. Белкин И.М. Средства линейно-угловых измерений. Справочник. - М. Машиностроение, 1987. 3. Васильев А.С. Основы метрологии и технические измерения. - М. Машиностроение, 1980. 4. Справочник по микроскопии для нанотехнологии / Под ред. Нан Яо, Чжцн Лин Ван / Перевод с англ. - М. Научный мир, 2011-712 с. (Раздел 1, с. 17-42) 5. Леонов Г.В., Мещеряков Р.В. Способ определения геометрических параметров объектов на изображении - патент Российской Федерации № 2111478 от 20.05.1998 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Спосіб визначення геометричних розмірів мікромасштабних прозорих об'єктів, який полягає у скануванні зображення, вимірюванні величини сигналу в вибраних точках по площині зображення об'єкта, що перевищує рівень шуму, до побудови контуру об'єкта, що вимірюється, за показником сигнал/шум, який відрізняється тим, що перед вимірюванням геометричних розмірів об'єктів після джерела освітлення встановлюють фіксовано поляризатор, а перед об'єктивом мікроскопу аналізатор, який має можливість обертання відносно оптичної осі поляризатора, визначають величину корисного сигналу в залежності від взаємного кутового положення поляризатора та аналізатора в діапазоні кутів від 0° до 180° з кроком у 5°-10°, знаходять мінімальне та максимальне значення сигналу та їх різницю, а вимірювання геометричних розмірів об'єктів проводять при кутовому положенні аналізатора, що відповідає 0,5 від різниці між максимальним та мінімальних значенням сигналу. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюMarkina Olha Mykolaivna, Kachur Nataliia Volodymyrivna, Maslov Volodymyr Petrovych
Автори російськоюМаркина Ольга Николаевна, Качур Наталья Владимировна, Маслов Владимир Петрович
МПК / Мітки
МПК: G01N 15/10
Мітки: об'єктів, прозорих, розмірів, спосіб, мікромасштабних, геометричних, визначення
Код посилання
<a href="https://ua.patents.su/5-95615-sposib-viznachennya-geometrichnikh-rozmiriv-mikromasshtabnikh-prozorikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення геометричних розмірів мікромасштабних прозорих об’єктів</a>
Пристрій для вимірювання геометричних розмірів прозорих труб
Номер патенту: 11268
Опубліковано: 15.12.2005
Автори: Нагорна Діна Романівна, Гришко Віктор Федорович, Колосова Олена Петрівна, Варваров Олександр Федорович, Долина Віктор Георгійович, Ярош Наталія Василівна, Аракелян Георгій Арменакович
МПК: G01B 9/00, G01B 21/10
Мітки: вимірювання, геометричних, труб, прозорих, розмірів, пристрій
Формула / Реферат:
Пристрій для вимірювання геометричних розмірів прозорих труб, що містить послідовно і оптично з'єднані джерело світла (1), розсіювач (2), щілинну діафрагму (3), об'єктив (4), фотоприймач (5), а також послідовно з'єднані блок обробки відеосигналу (6), блок обчислень (7) і індикатор (8), який відрізняється тим, що пристрій додатково містить задавач струму (9), вхід якого з'єднаний з другим виходом блока обчислень (7), а вихід з'єднаний із...
Спосіб визначення геометричних розмірів космічних об’єктів

Номер патенту: 18972
Опубліковано: 15.11.2006
Автори: Загорулько Олександр Миколайович, Моргун Олександр Андрійович, Богом'я Володимир Іванович
МПК: H04B 7/00
Мітки: об'єктів, розмірів, геометричних, спосіб, визначення, космічних
Формула / Реферат:
Спосіб визначення геометричних розмірів космічних об'єктів, який полягає у тому, що при опромінюванні космічних об'єктів радіолокаційними системами з довжиною хвилі, більшою за розміри об'єкту, спостерігається ефект релеєвського розсіювання, при якому ефективна відбиваюча поверхня об'єкту стає значно більшою від площини поперечного зрізу та залежить від розмірів об'єкту та довжини хвилі, що при використанні випромінювання на різних довжинах...
Пристрій для вимірювання геометричних розмірів і визначення форми поверхневих втрат металу тіла труби
Номер патенту: 86513
Опубліковано: 10.01.2014
МПК: G01V 13/00
Мітки: геометричних, пристрій, розмірів, трубі, втрат, поверхневих, визначення, металу, тіла, форми, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання геометричних розмірів і визначення форми поверхневих втрат металу тіла труби, який містить індуктивний давач з визначеним діапазоном вимірювання відстаней до металевої поверхні труби без контакту з ізоляцією трубопроводу в процесі вимірювання, систему переміщення давача вздовж поверхні металу, яка складається з каретки, напрямних і спеціального ходового гвинта з приводом від крокового двигуна, та мікропроцесорний...
Спосіб визначення розмірів фактичної поверхні контакту взаємодіючих прозорих тіл з плоскими бічними поверхнями
Номер патенту: 42488
Опубліковано: 15.09.2004
Автор: Ахлестін Олександр Володимирович
МПК: G01B 11/28
Мітки: плоскими, розмірів, спосіб, визначення, тіл, поверхнями, контакту, поверхні, бічними, фактичної, прозорих, взаємодіючих
Формула / Реферат:
1. Спосіб визначення розмірів фактичної поверхні контакту взаємодіючих прозорих тіл з плоскими бічними поверхнями, що включає просвічування зони контакту, реєстрацію під кутом до бічної поверхні видимої площини контакту, вимірювання і перерахунок розмірів видимого контакту в фактичні по формулі:, де:
Інтерференційний спосіб визначення геометричних розмірів об’єктів
Номер патенту: 8603
Опубліковано: 30.09.1996
Автор: Гафанович Георгій Якович
МПК: G01B 11/00, G01B 11/16
Мітки: об'єктів, інтерференційний, спосіб, розмірів, визначення, геометричних
Формула / Реферат:
1. Интерференционный способ определения геометрических размеров объектов, заключающийся в том, что объект помещают в рабочее плечо интерферометра, направляют в интерферометр монохроматический свет и по количеству полуволн света, укладывающихся в размеры объекта, определяют его размеры, отличающийся тем, что, с целью обеспечения определения размеров прозрачных, объектов, дополнительно направляют в интерферометр белый свет, объект перемещают...
Попередній патент: Захисне оптичне вікно
Наступний патент: Спосіб прогнозування зрощення перелому
Випадковий патент: Комплектний розподільний пристрій