Беззазорна черв’ячна передача
Номер патенту: 95715
Опубліковано: 12.01.2015
Автори: Кроль Олег Соломонович, Шевченко Святослав Володимирович, Сухорутченко Іван Олександрович

Формула / Реферат
1. Беззазорна черв'ячна передача, що містить робочий евольвентний черв'як і сполучене з ним черв'ячне колесо, зуби якого огинають витки черв'яка, яка відрізняється тим, що черв'як під дією власної ваги зміщений вертикально вниз до зіткнення вершин його витків із западинами зубів черв'ячного колеса на величину
![]() ,
,
де ![]() - радіус вершин витків черв'яка, мм; (
- радіус вершин витків черв'яка, мм; (![]() і
і ![]() - модуль і коефіцієнт діаметру черв'яка);
- модуль і коефіцієнт діаметру черв'яка);
![]() - радіус дуги кола, що обкреслює вершини зубів черв'ячного колеса;
- радіус дуги кола, що обкреслює вершини зубів черв'ячного колеса;
![]() ;
; ![]() ;
;
![]() ;
; ![]() - ширина зубчастого вінця черв'ячного колеса.
- ширина зубчастого вінця черв'ячного колеса.
2. Беззазорна черв'ячна передача за п. 1, яка відрізняється тим, що дві сторони витка черв'яка одночасно торкаються двох зубів черв'ячного колеса, розташованого у горизонтальній площині.
Текст
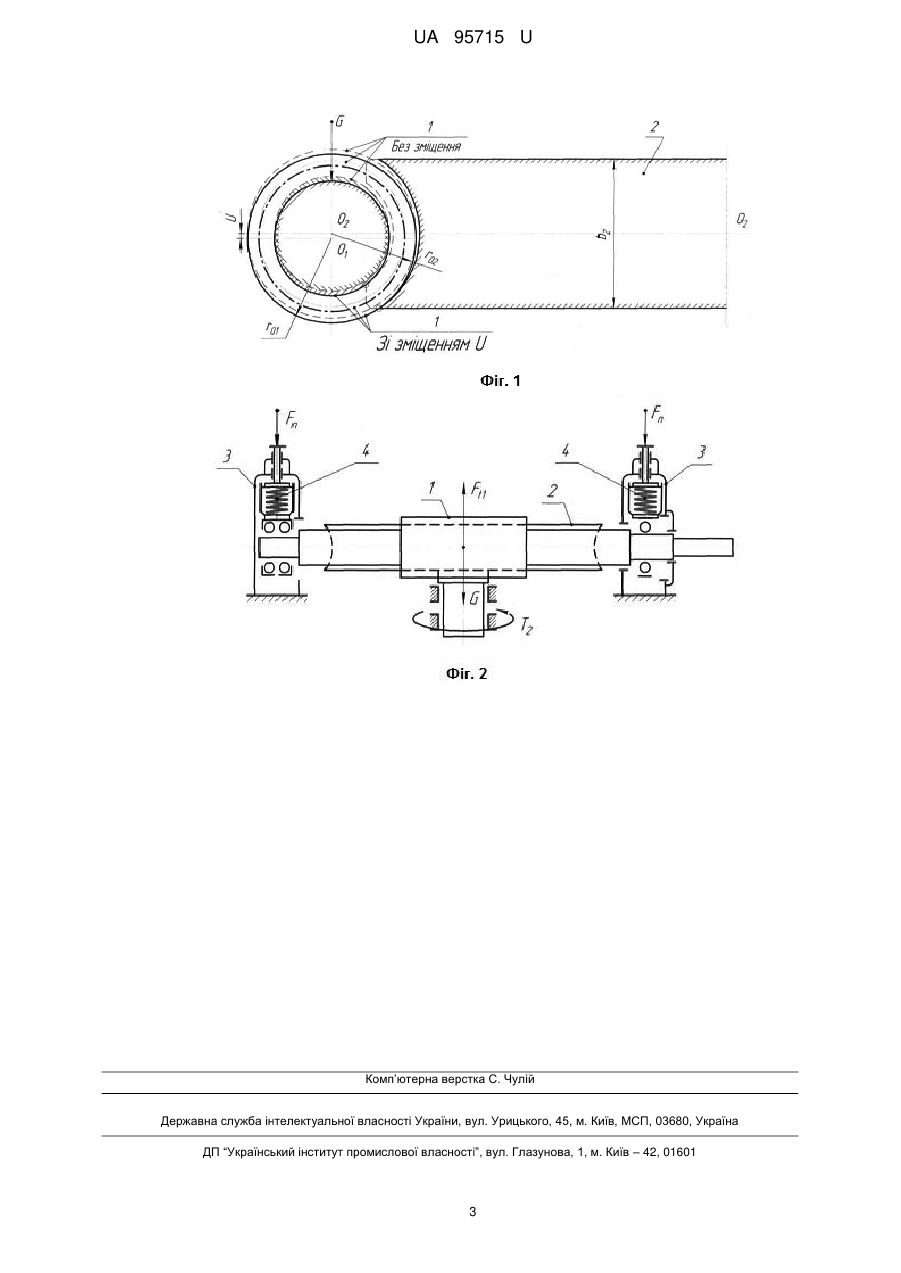
Реферат: Беззазорна черв'ячна передача, що містить робочий евольвентний черв'як і сполучене з ним черв'ячне колесо, зуби якого огинають витки черв'яка, причому черв'як під дією власної ваги зміщений вертикально вниз до зіткнення вершин його витків із западинами зубів черв'ячного колеса на величину 2 2 u ra1 rO2 2 ra1 rO2 cos , де ra1 0,5 m q 2 - радіус вершин витків черв'яка, мм; ( m і q - модуль і коефіцієнт діаметру черв'яка); rO2 ra1 0,2 m - радіус дуги кола, що обкреслює вершини зубів черв'ячного колеса; 2 2 1 2 2 ; 1 arccos rO2 0,5 b2 / ra1 ; 2 arcsin0,5 b2 / rO2 ; b2 15 ra1 - ширина зубчастого вінця черв'ячного колеса. , UA 95715 U (54) БЕЗЗАЗОРНА ЧЕРВ'ЯЧНА ПЕРЕДАЧА UA 95715 U UA 95715 U 5 10 15 20 25 30 35 Корисна модель належить до області машинобудування і може бути використана в приводах до пристроїв, де потрібно строгу синхронізацію обертань черв'яка і черв'ячного колеса як в умовах реверсивного режиму, так і при природному зносі робочих поверхонь черв'яка і черв'ячного колеса. Відомо черв'ячну передачу, що містить двокроковий черв'як і сполучене з ним однокрокове черв'ячне колесо (див. патент RU 2044194, F16H/16, заявлений 13.01.1992, опублікований 20.09.1995). Осьові кроки цього черв'яка на правій і лівій сторонах витків різні за рахунок виконання початкової утворюючої поверхні черв'яка під кутом до осі черв'ячної фрези. Відомій передачі властиві наступні недоліки. По-перше, підвищений рівень втрат на тертя, що пов'язано з наявністю нешліфованих витків робочого черв'яка. По-друге, для усунення зазорів, що виникають у результаті неминучого зносу витків та зубців потрібна періодична зупинка робочого механізму для переміщення черв'яка у осьовому напрямі. Найбільш близькою з відомих черв'ячних передач до корисної моделі, що заявляється, є беззазорна черв'ячна передача, що містить два черв'яки, що зачіпляються з одним черв'ячним колесом (див. а. св. СРСР № 1128019, F16H 1/16, опублікований 07.12.1984, бюл. № 45, 1984) прототип. Недоліками відомої беззазорної черв'ячної передачі є конструктивна складність механізму, пов'язана з наявністю великої кількості додаткових деталей і вузлів: допоміжного черв'яка, двох зубчастих коліс, розташованих на валах черв'яків і сполучених кінематично між собою, фрикційної муфти для забезпечення відносного повороту черв'яків. Зазори у зачепленнях зубчастих коліс і у муфті призводить до неузгодження обертань робочого черв'яка і черв'ячного колеса при реверсуванні. У міру збільшення цих зазорів несинхронність обертання робочого черв'яка і черв'ячного колеса при реверсуванні зростатиме. Крім того, тертя в зачепленні зубчастих коліс і прослизання у муфті призводять до додаткових втрат на тертя і, як результат, до зниження ККД усього механізму. За основу корисної моделі поставлено завдання забезпечення беззазорного зачеплення в черв'ячній передачі з використанням стандартних черв'яків і фрез, а також існуючих технологій виготовлення, що приведе до синхронізації обертань робочого черв'яка і черв'ячного колеса при реверсуванні і підвищення ККД механізму. Поставлене завдання досягається шляхом того, що у беззазорній черв'ячній передачі, що містить один робочий евольвентний черв'як і сполучене з ним черв'ячне колесо, зуби якого огинають витки черв'яка, згідно корисної моделі, черв'як під дією власної ваги G зміщений вертикально вниз, зберігаючи вісь обертання горизонтальною, до зіткнення вершин його витків із западинами зубів черв'ячного колеса і торкаючись двома сторонами витка двох зубів черв'ячного колеса, розташованого в горизонтальній площині, а величина зміщення u вісь черв'як визначена із співвідношення 2 2 u ra1 rO2 2 ra1 rO2 cos (1) , де ra1 0,5 m q 2 - радіус вершин витків черв'яка, мм; ( m і q - модуль і коефіцієнт діаметру черв'яка); rO2 ra1 0,2 m - радіус дуги кола, що обкреслює вершини зубів черв'ячного колеса; 40 2 1 2 2 ; 1 arccos rO2 0,5 b2 2 / ra1 ; 2 arcsin0,5 b2 / rO2 ; b2 15 ra1 - ширина зубчастого вінця колеса. , 45 50 55 На фіг. 1 зображена схема беззазорної черв'ячної передачі, що містить робочий евольвентний черв'як і черв'ячне колесо 2, розташоване у горизонтальній площині, зуби якого огинають витки черв'яка. На фіг. 2 зображена беззазорна черв'ячна передача у зборі, де черв'як 1 знаходиться у зачепленні з колесом 2 і встановлений у опорах 3. Пружини 4, встановлені в опорах 3, перешкоджають підйому вверх черв'яка 1, у разі, коли окружна сила на черв'яку 1 перевищить його власну вагу G. Беззазорна черв'ячна передача функціонує наступним чином Для здійснення вертикального зміщення валу черв'яка 1 його підшипники знаходяться в ковзаючих опорах 3, які дозволяють валу черв'яка 1 самоустановлюватися у вертикальному напрямі, зберігаючи горизонтальною вісь обертання (фіг. 2). Спрямована униз окружна сила Ft1 черв'яка 1 сприяє збереженню беззазорного зачеплення черв'яка 1 з черв'ячним колесом 2. При цьому точка О1, що є проекцією осі симетрії черв'яка 1 на його торцеву площину, зміщена униз під дією власної ваги G черв'яка 1 і сили Ft1 відносно середньої торцевої площини черв'ячного колеса 2 (вісь О2-О2 на фіг. 1) на величину u. 1 UA 95715 U 5 При реверсі, коли спрямована уверх сила Ft1 (фіг. 2) сприяє підйому черв'яка 1 угору і утворенню зазорів у зачепленні, їх появі перешкоджає сила стискування FП пружин 4, встановлених у ковзаючих опорах 3, де закріплені підшипники валу черв'яка 1. Потрібна сила стискування FП пружин 4, що запобігає утворенню зазорів в черв'ячній передачі, визначена співвідношенням: FП Т 2 tg G d2 2 , (Н), (2) де Т 2 - обертальний момент на валу черв'ячного колеса, Нм; d2 m z 2 - ділильний діаметр черв'ячного колеса, м; arctgz1 q - ділильний кут підйому витків черв'яка ( z1 - число витків черв'яка); 10 - приведений кут тертя у черв'ячній передачі; G - власна вага валу черв'яка у зборі з опорами, Н. Для компенсації зносу робочих поверхонь передачі пружини 4 повинні мати невелике попереднє стискування. Таким чином, значення сили FП з урахуванням зносу витків черв'яка 1 і зубів черв'ячного колеса 2 визначено залежністю FП k T2 15 20 25 tg G , d2 2 (Н), , де k 11 - коефіцієнт попереднього стискування пружини. Підшипники, напресовані на вал черв'яка 1, встановлюються у ковзаючих опорах 3. Витки черв'яка 1 вводяться у зачеплення із зубами черв'ячного колеса 2. Причому, первинна установка черв'яка 1 відносно черв'ячного колеса 2 робиться за діючим правилом: вісь черв'яка 1, - точка О2 (фіг. 1), знаходиться в середній торцевій площині черв'ячного колеса 2 - вісь О2-О2 (фіг. 1). Оскільки опори валу черв'яка 1 розміщені в ковзаючих опорах 3, то під дією власної ваги G вал черв'яка 1 разом з ковзаючими опорами 3 опускається униз, вибираючи при цьому осьові і радіальні зазори у зачепленні. Вісь черв'яка 1 при цьому залишається у горизонтальній площині і переміщається в точку О 1 (фіг. 1). В результаті утворюється беззазорне зачеплення між витками черв'яка 1 і зубами черв'ячного колеса 2, оскільки обидві сторони витка одночасно контактують з двома зубами черв'ячного колеса 2. При дії сили Ft1 вертикально униз пружини 4 не чинять тиску на черв'як 1 (нехтуючи силами їх попереднього стискування). При дії сили Ft1 вертикально уверх пружини 4 починають впливати на вал черв'яка 1 силою FП, яка перешкоджає його переміщенню угору і зберігає, тим самим, нульові зазори у зачепленні. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 (3) 1. Беззазорна черв'ячна передача, що містить робочий евольвентний черв'як і сполучене з ним черв'ячне колесо, зуби якого огинають витки черв'яка, яка відрізняється тим, що черв'як під дією власної ваги зміщений вертикально вниз до зіткнення вершин його витків із западинами зубів черв'ячного колеса на величину 2 2 u ra1 rO2 2 ra1 rO2 cos , де ra1 0,5 m q 2 - радіус вершин витків черв'яка, мм; ( m і q - модуль і коефіцієнт діаметру черв'яка); rO2 ra1 0,2 m - радіус дуги кола, що обкреслює вершини зубів черв'ячного колеса; 40 2 2 1 2 2 ; 1 arccos rO2 0,5 b2 / ra1 ; 2 arcsin0,5 b2 / rO2 ; b2 15 ra1 - ширина зубчастого вінця черв'ячного колеса. , 2. Беззазорна черв'ячна передача за п. 1, яка відрізняється тим, що дві сторони витка черв'яка одночасно торкаються двох зубів черв'ячного колеса, розташованого у горизонтальній площині. 2 UA 95715 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюShevchenko Sviatoslav Volodymyrovych, Krol Oleh Solomonovych
Автори російськоюШевченко Святослав Владимирович, Кроль Олег Соломонович
МПК / Мітки
МПК: F16H 1/16
Мітки: беззазорна, черв'ячна, передача
Код посилання
<a href="https://ua.patents.su/5-95715-bezzazorna-chervyachna-peredacha.html" target="_blank" rel="follow" title="База патентів України">Беззазорна черв’ячна передача</a>
Черв’ячна беззазорна передача
Номер патенту: 51489
Опубліковано: 15.02.2005
Автори: Надєін Владислав Семенович, Хамуйела Жоаким Аугушто Герра, Хамуйела Тетяна Олегівна, Кропівний Володимир Миколайович
МПК: F16H 1/16
Мітки: беззазорна, передача, черв'ячна
Формула / Реферат:
Черв'ячна беззазорна передача, що містить два корпуси, в одному з яких розташовано черв'як, а в іншому - черв'ячне колесо, а також натискний механізм, яка відрізняється тим, що корпус черв'ячного колеса, початкова поверхня якого є конічною, розташовано у розточках корпуса черв'яка з можливістю осьового переміщення разом з черв'ячним колесом у напрямку до черв'яка, а натискний механізм встановлено в корпусі черв’яка співвісно з корпусом...
Магнітна червячна передача
Номер патенту: 1009
Опубліковано: 30.12.1993
Автор: Баньковський Петро Андрійович
МПК: F16H 1/16
Мітки: черв'ячна, магнітна, передача
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и яМагнитная червячная передача, содержащая червяк и червячное колесо глобоидного зацепления, витки резьбы которых выполнены из ферромагнитного материала, о т л и ч а ю щ а я с я тем, что, с целью повышения передаваемой мощности за счет увеличения крутящего момента, червячное колесо выполнено в виде червяка, а оба червяка идентичны и выполнены монолитными из высококоэрцитивного магнитного сплава с углом...
Шарикова черв’ячна передача р.л. неміровського
Номер патенту: 26131
Опубліковано: 07.06.1999
Автор: Неміровський Рафаіл Леонідович
МПК: F16H 1/16
Мітки: р.л, шарикова, неміровського, черв'ячна, передача
Формула / Реферат:
1. Шариковая червячная передача, содержащая червяк, взаимодействующее с ним червячное колесо и шарики, размещенные на боковых поверхностях зуба червяка, отличающаяся тем, что боковые поверхности зубьев червяка в нормальном сечении выполнены прямолинейного или вогнутого профиля, боковые поверхности зубьев червячного колеса выполнены прямолинейного профиля, а на дне впадин зубьев червяка выполнены винтовые канавки, предназначенные для...
Черв’ячна передача

Номер патенту: 2249
Опубліковано: 26.12.1994
Автор: Бірюков Борис Миколайович
МПК: F16H 1/16
Формула / Реферат:
Червячная передача, содержащая глобоидный червяк, взаимодействующее с ним червячное колесо, тела качения, размещенные в канавках червяка, и канал возврата, отличающаяся тем, что, с целью повышения КПД, канал возврата выполнен в виде нескольких замкнутых контуров, каждый из которых образован по крайней мере двумя участками, сообщенными с соответствующими смежными канавками червяка, при этом максимальный угол aмакс между входящими в...
Зубчато-роликова передача

Номер патенту: 20128
Опубліковано: 25.12.1997
Автор: Лисенко Леонід Власович
МПК: F16H 1/24
Мітки: передача, зубчато-роликова
Формула / Реферат:
Зубчато-роликова передача, яка складається з шестерні в півциліндричних впадинах якої жорстко закріплені зуби - ролики з кроком не більшим 0,05 діаметра шестерні, з нею знаходиться в зачепленні зубчате колесо з півциліндричними впадинами, і відрізняється тим, що півциліндричні впадини в шестерні і зубчатому колесі мають радіус і глибину рівну радіусу зубів-роликів, зовнішня поверхня виступів зубів-роликів концентрична циліндричній поверхні...
Попередній патент: Штам бактерій rhizobium galegae л2 (колекція імів нау україни) для одержання бактеріального добрива під козлятник східний
Наступний патент: Саморіз
Випадковий патент: Спосіб прогнозування рівня продуктивності і відбору овець у ранньому віці