Спосіб визначення буксування коліс мобільної машини
Номер патенту: 96661
Опубліковано: 10.02.2015
Автори: Антощенков Віктор Миколайович, Антощенков Роман Вікторович

Формула / Реферат
Спосіб визначення буксування коліс мобільної машини, що включає визначення кутової швидкості обертання коліс та поступової швидкості руху мобільної машини, який відрізняється тим, що вимірювання швидкості обертання коліс відбувається за допомогою гіроскопа та акселерометра, швидкість поступового руху визначається навігаційним приймачем та буксування коліс мобільної машини розраховується мікроконтролером і відображається на дисплеї.
Текст
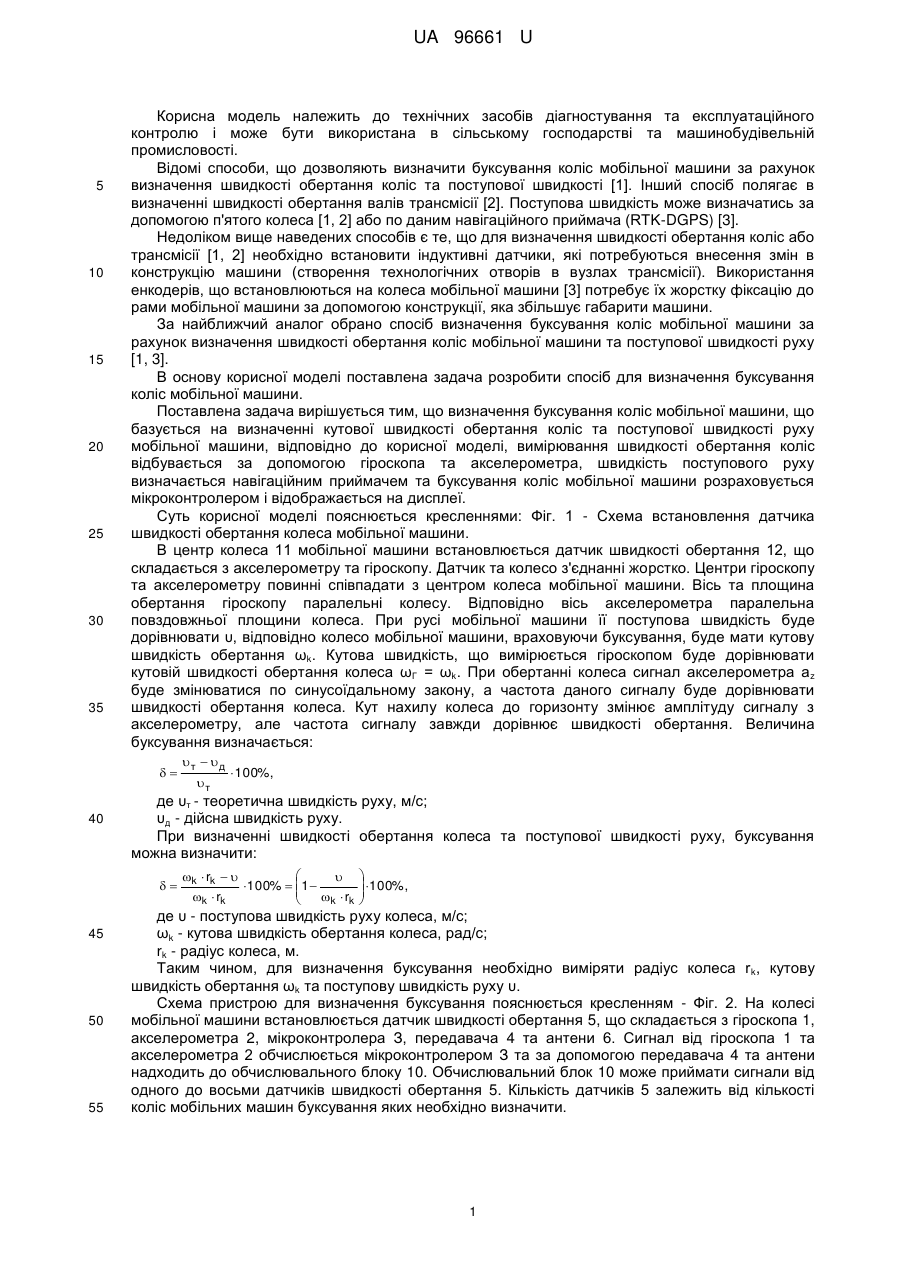
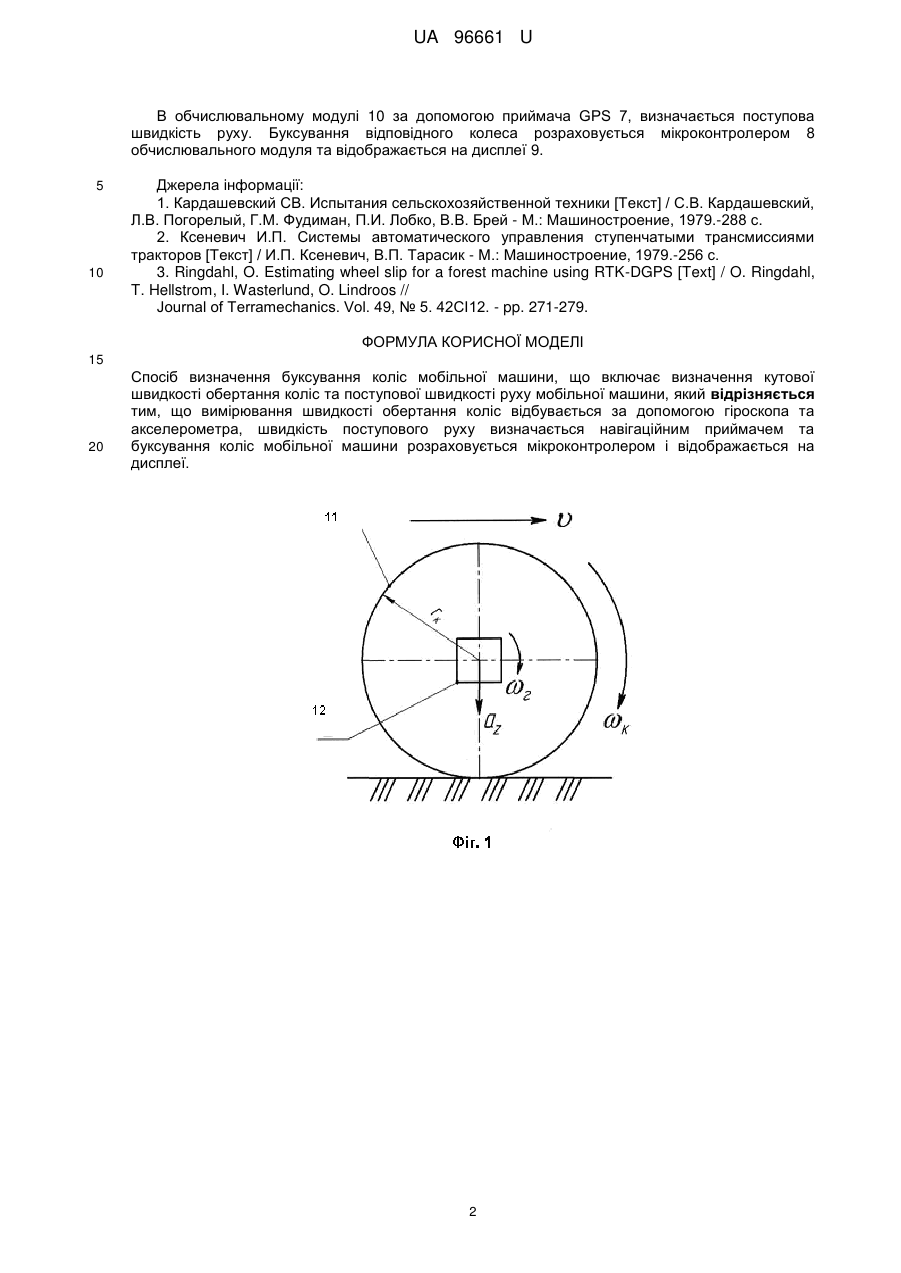
Реферат: Спосіб визначення буксування коліс мобільної машини включає визначення кутової швидкості обертання коліс та поступової швидкості руху мобільної машини. Вимірювання швидкості обертання коліс відбувається за допомогою гіроскопа та акселерометра, швидкість поступового руху визначається навігаційним приймачем та буксування коліс мобільної машини розраховується мікроконтролером і відображається на дисплеї. UA 96661 U (54) СПОСІБ ВИЗНАЧЕННЯ БУКСУВАННЯ КОЛІС МОБІЛЬНОЇ МАШИНИ UA 96661 U UA 96661 U 5 10 15 20 25 30 35 Корисна модель належить до технічних засобів діагностування та експлуатаційного контролю і може бути використана в сільському господарстві та машинобудівельній промисловості. Відомі способи, що дозволяють визначити буксування коліс мобільної машини за рахунок визначення швидкості обертання коліс та поступової швидкості [1]. Інший спосіб полягає в визначенні швидкості обертання валів трансмісії [2]. Поступова швидкість може визначатись за допомогою п'ятого колеса [1, 2] або по даним навігаційного приймача (RTK-DGPS) [3]. Недоліком вище наведених способів є те, що для визначення швидкості обертання коліс або трансмісії [1, 2] необхідно встановити індуктивні датчики, які потребуються внесення змін в конструкцію машини (створення технологічних отворів в вузлах трансмісії). Використання енкодерів, що встановлюються на колеса мобільної машини [3] потребує їх жорстку фіксацію до рами мобільної машини за допомогою конструкції, яка збільшує габарити машини. За найближчий аналог обрано спосіб визначення буксування коліс мобільної машини за рахунок визначення швидкості обертання коліс мобільної машини та поступової швидкості руху [1, 3]. В основу корисної моделі поставлена задача розробити спосіб для визначення буксування коліс мобільної машини. Поставлена задача вирішується тим, що визначення буксування коліс мобільної машини, що базується на визначенні кутової швидкості обертання коліс та поступової швидкості руху мобільної машини, відповідно до корисної моделі, вимірювання швидкості обертання коліс відбувається за допомогою гіроскопа та акселерометра, швидкість поступового руху визначається навігаційним приймачем та буксування коліс мобільної машини розраховується мікроконтролером і відображається на дисплеї. Суть корисної моделі пояснюється кресленнями: Фіг. 1 - Схема встановлення датчика швидкості обертання колеса мобільної машини. В центр колеса 11 мобільної машини встановлюється датчик швидкості обертання 12, що складається з акселерометру та гіроскопу. Датчик та колесо з'єднанні жорстко. Центри гіроскопу та акселерометру повинні співпадати з центром колеса мобільної машини. Вісь та площина обертання гіроскопу паралельні колесу. Відповідно вісь акселерометра паралельна повздовжньої площини колеса. При русі мобільної машини її поступова швидкість буде дорівнювати υ, відповідно колесо мобільної машини, враховуючи буксування, буде мати кутову швидкість обертання ωk. Кутова швидкість, що вимірюється гіроскопом буде дорівнювати кутовій швидкості обертання колеса ωΓ = ωk. При обертанні колеса сигнал акселерометра a z буде змінюватися по синусоїдальному закону, а частота даного сигналу буде дорівнювати швидкості обертання колеса. Кут нахилу колеса до горизонту змінює амплітуду сигналу з акселерометру, але частота сигналу завжди дорівнює швидкості обертання. Величина буксування визначається: 40 50 55 т 100%, де υт - теоретична швидкість руху, м/с; υд - дійсна швидкість руху. При визначенні швидкості обертання колеса та поступової швидкості руху, буксування можна визначити: 45 т д k rk 100% 1 r k rk k k 100%, де υ - поступова швидкість руху колеса, м/с; ωk - кутова швидкість обертання колеса, рад/с; rk - радіус колеса, м. Таким чином, для визначення буксування необхідно виміряти радіус колеса r k, кутову швидкість обертання ωk та поступову швидкість руху υ. Схема пристрою для визначення буксування пояснюється кресленням - Фіг. 2. На колесі мобільної машини встановлюється датчик швидкості обертання 5, що складається з гіроскопа 1, акселерометра 2, мікроконтролера З, передавача 4 та антени 6. Сигнал від гіроскопа 1 та акселерометра 2 обчислюється мікроконтролером З та за допомогою передавача 4 та антени надходить до обчислювального блоку 10. Обчислювальний блок 10 може приймати сигнали від одного до восьми датчиків швидкості обертання 5. Кількість датчиків 5 залежить від кількості коліс мобільних машин буксування яких необхідно визначити. 1 UA 96661 U В обчислювальному модулі 10 за допомогою приймача GPS 7, визначається поступова швидкість руху. Буксування відповідного колеса розраховується мікроконтролером 8 обчислювального модуля та відображається на дисплеї 9. 5 10 Джерела інформації: 1. Кардашевский СВ. Испытания сельскохозяйственной техники [Текст] / С.В. Кардашевский, Л.В. Погорелый, Г.М. Фудиман, П.И. Лобко, В.В. Брей - Μ.: Машиностроение, 1979.-288 с. 2. Ксеневич И.П. Системы автоматического управления ступенчатыми трансмиссиями тракторов [Текст] / И.П. Ксеневич, В.П. Тарасик - М.: Машиностроение, 1979.-256 с. 3. Ringdahl, O. Estimating wheel slip for a forest machine using RTK-DGPS [Text] / O. Ringdahl, T. Hellstrom, I. Wasterlund, O. Lindroos // Journal of Terramechanics. Vol. 49, № 5. 42СІ12. - pp. 271-279. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Спосіб визначення буксування коліс мобільної машини, що включає визначення кутової швидкості обертання коліс та поступової швидкості руху мобільної машини, який відрізняється тим, що вимірювання швидкості обертання коліс відбувається за допомогою гіроскопа та акселерометра, швидкість поступового руху визначається навігаційним приймачем та буксування коліс мобільної машини розраховується мікроконтролером і відображається на дисплеї. 2 UA 96661 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюAntonschenkov Roman Viktorovych, Antonschenkov Viktor Mykolaiovych
Автори російськоюАнтощенков Роман Викторович, Антощенков Виктор Николаевич
МПК / Мітки
МПК: B60B 39/00
Мітки: коліс, машини, спосіб, визначення, буксування, мобільної
Код посилання
<a href="https://ua.patents.su/5-96661-sposib-viznachennya-buksuvannya-kolis-mobilno-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення буксування коліс мобільної машини</a>
Спосіб визначення енергетичних витрат мобільної машини
Номер патенту: 89312
Опубліковано: 10.04.2014
Автор: Антощенков Роман Вікторович
МПК: A01B 67/00, A01B 73/00
Мітки: витрат, енергетичних, машини, спосіб, мобільної, визначення
Формула / Реферат:
Спосіб визначення енергетичних витрат мобільної машини, що базується на використанні залежності витрати потужності від параметрів функціонування мобільної машини безпосередньо в умовах експлуатації, з використанням датчиків моменту, витрати палива, швидкості обертання колінчатого вала двигуна, валів трансмісії, коліс, положення мобільної машини на місцевості, тягового зусилля, який відрізняється тим, що вимірювання витрати енергії двигуном,...
Спосіб зменшення буксування ведучих коліс автомобіля
Номер патенту: 61972
Опубліковано: 10.08.2011
Автори: Сєріков Євген Миколайович, Колодяжний Андрій Сергійович
МПК: F02D 17/00, B60K 28/00
Мітки: ведучих, зменшення, спосіб, автомобіля, коліс, буксування
Формула / Реферат:
1. Спосіб зменшення буксування ведучих коліс автомобіля, що полягає в припиненні подачі палива в, як мінімум, один циліндр двигуна при виникненні буксування ведучих коліс автомобіля, який відрізняється тим, що припинення подачі палива в, як мінімум, один циліндр двигуна здійснюється циклічно з періодом Т = 0,1...2 с, на проміжок часу tвідкл = 0,05...1 с.2. Спосіб зменшення буксування ведучих коліс автомобіля за п. 1, який...
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини
Номер патенту: 28231
Опубліковано: 26.11.2007
Автори: Топчій Святослав Сергійович, Топчій Сергій Іванович
МПК: F02B 41/00
Мітки: згоряння, турбокомпресор, внутрішнього, машини, мобільної, двигуна
Формула / Реферат:
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини, що має середній корпус з встановленим в ньому підшипником вала турбокомпресора, вал, турбінне і компресорні колеса, встановлені на валу, корпуси турбіни і компресора, приєднані до середнього корпусу, який відрізняється тим, що в корпусі компресора в напрямку, протилежному напрямку обертання колеса компресора, і під кутом до лопаток колеса виконано соплові канали, до яких...
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини
Номер патенту: 47149
Опубліковано: 25.01.2010
Автор: Топчій Сергій Іванович
МПК: F02B 41/00
Мітки: двигуна, турбокомпресор, машини, внутрішнього, мобільної, згоряння
Формула / Реферат:
Турбокомпресор для двигуна внутрішнього згоряння мобільної машини, що має середній корпус з встановленим в ньому підшипником вала турбокомпресора, вал, турбінне і компресорні колеса, встановлені на валу, ущільнення підшипникового вузла, корпуси турбіни і компресора, приєднані до середнього корпуса, який відрізняється тим, що в корпусі компресора виконано два канали, з'єднані з пневмосистемою мобільної машини, по яких стиснене повітря...
Пристрій для визначення кута закручування рами мобільної машини
Номер патенту: 63398
Опубліковано: 10.10.2011
Автори: Довбуш Тарас Анатолійович, Бабій Андрій Васильович, Попович Павло Васильович, Рибак Тимофій Іванович
МПК: G01L 1/00
Мітки: кута, закручування, пристрій, визначення, машини, мобільної, рами
Формула / Реферат:
Пристрій для визначення кута закручування рами мобільної машини, що складається з двох захватів, які одними кінцями приєднано до несучих елементів рами мобільної машини, а іншими через з'єднувальні елементи з'єднано з подовжувачами, на кінцях яких змонтовано чутливий елемент, який відрізняється тим, що з'єднувальні елементи виконані у вигляді болтових фіксаторів з можливістю утворення нерухомого фрикційного з'єднання для фіксації...
Попередній патент: Спосіб оцінки фазових взаємодій в еег між двома сигналами за оригінальним індексом фазового зсуву
Наступний патент: Спосіб лікування еректильної дисфункції у хворих на хронічний простатит
Випадковий патент: Машина для оброблення баласту залізничного шляху