Копіювальна слідкуюча система пропорційного керування для металорізальних верстатів
Номер патенту: 9773
Опубліковано: 30.09.1996
Автори: Дубров Борис Іванович, Лавріненко Анатолій Костянтинович

Формула / Реферат
(57) Копировальная следящая система пропорционального управления для металлорежущих станков, содержащая копировальный датчик, предварительный усилитель-выпрямитель, усилители сигналов задающего и следящего каналов и электроприводов, отличающаяся тем, что она снабжена дистанционным регулятором чувствительности датчика, преобразователем уровня, блоком выделения модуля сигнала и нелинейными блоками, причем вход регулятора чувствительности датчика подключен к выходу предварительного усилителя-выпрямителя, а его выход подсоединен к первому входу преобразователя уровня, ко второму входу которого подключена шина сигнала смещения, выход преобразователя уровня подключен ко входу усилителя сигналов следящего канала и через блок выделения модуля сигнала - к первому входу усилителя сигналов задающего канала, ко второму входу которого подсоединена шина сигнала смещения, а нелинейные блоки включены в цепь обратной связи усилителей сигналов задающего и следящего каналов.
Текст
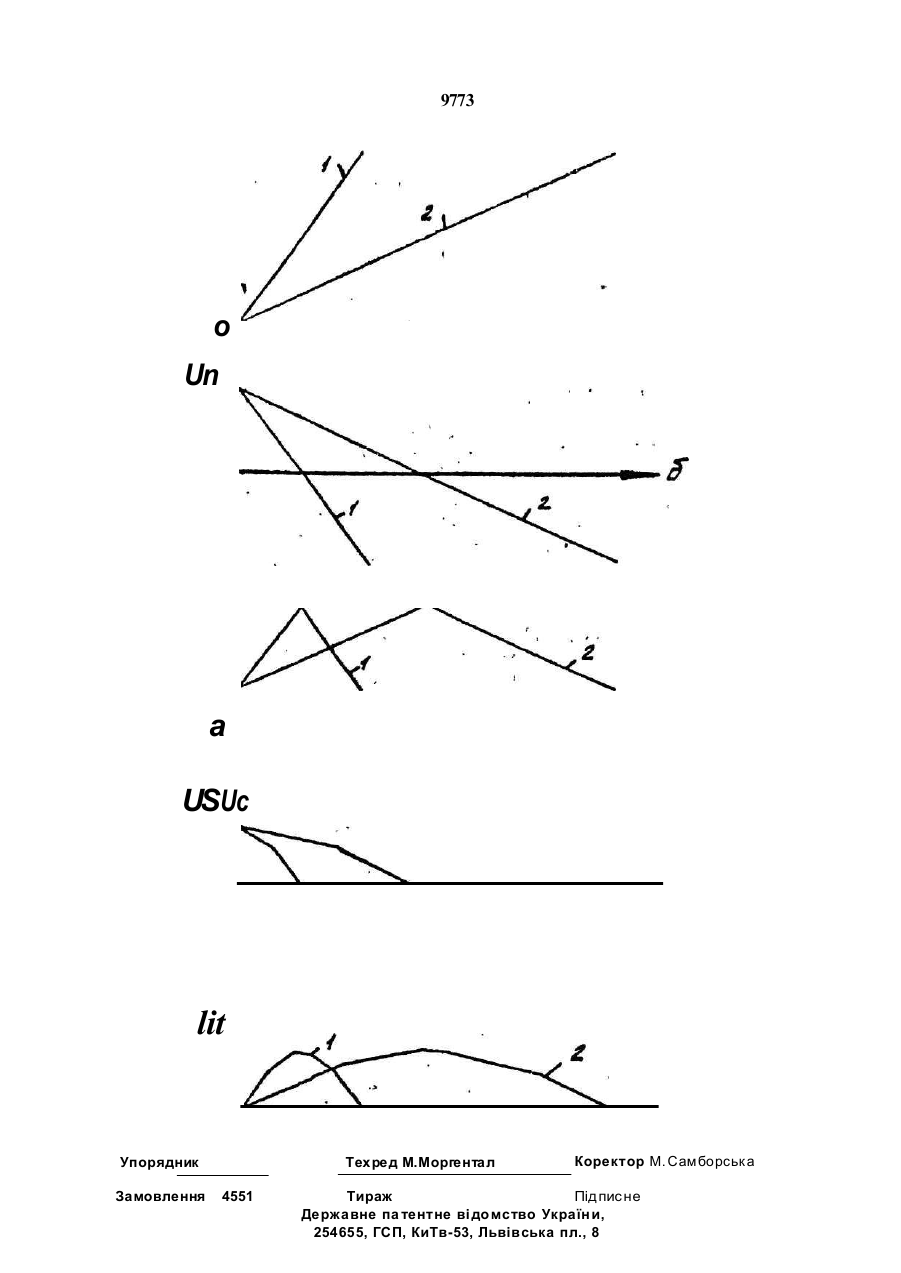
Копировальная следящая система про порционального управления для металлоре жущих станков, содержащая копироваль ный датчик, предварительный усилительвыпрямитель, усилители сигналов задающе го и следящего каналов и электроприводов, о т л и ч а ю щ а я с я тем, что она снабжена дистанционным регулятором чувствительности датчика, преобразователем уровня, блоком выделения модуля сигнала и нелинейными блоками, причем вход регулятора чувствительности датчика подключен к выходу предварительного усилителя-выпрямителя, а" его выход подсоединен к первому входу преобразователя уровня, ко второму входу которого подключена шина сигнала смещения, выход преобразователя уровня подключен ко входу усилителя сигналов следящего канала и через блок выделения модуля сигнала - к первому входу усилителя сигналов задающего канала, ко второму входу которого подсоединена шина сигнала смещения, а нелинейные блоки включены в цепь обратной связи усилителей сигналов задающего и следящего каналов. С > VI со Изобретение относится к станкостроению и может быть использовано в копировальных станках. Известны копировальные следящие системы пропорционального управления, содержащие датчик , предварительный усилитель-выпрямитель, усилители следящего и задающего каналов и их электроприводы. Недостатком таких систем является сложность их настройки при изменении режима обработки. Так, при чистовой обработке для обеспечения точности необходима высокая чувствительность датчика, а при черновой обработке для обеспечения устой чивости работы системы чувствительность »2 w необходимо снижать. Задачей изобретения является упроще ние процесса настройки системы и повыше- ґ*\ ниє за счет этого производительности и ^ точности. Указанная задача решается тем, что копировальная следящая система, содержащая копировальный датчик, предварительный усилитель-выпрямитель, усилители сигналов задающего и следящего каналов и электроприводов, имеет дистанционный регулятор чувствительности датчика, преобразователь уровня, блок выделения модуля сигнала и нелинейные блоки, причем вход регулятора чувствительности датчика под 9773 ключей к выходу предварительного усилителя выпрямителя, а его выход подсоединен к первому вх оду преобразователя уровня, ко второму вх оду которого подключена шина сигнала смещения, выход преобразователя 5 уровня подключен на вх од усилителя с игналов след ящ его канала и через блок выделени я мод у ля с иг на л а н а пе рв ы й вх од ус илителя задающего канала, на второй вх од которого подс оединена ш ина с игнала 10 смещения, а нелинейные блоки включены в цепь обратной связи ус илителей зад ающего и с лед ящ его каналов. Сущнос ть изобретения гтоясняетс я чертежом, гд е на фиг. 1 показана блок-схема 15 пред лагаемой с ис темы копирования, а на фиг.2 предс тавлена зависимос ть изменения вых од ных с игналов блоков с ис темы в зависимос ти от величины отклонения копировального д атчика и положения регу лятора 20 чувс твительнос ти д атчика; кривые 1 - при установке регу лятора на макс имальную чув ствительнос ть датчика; кривые 2 - на минимальную чувс твительнос ть датчика. Копировальная с ис тема с ос тоит из ко- 25 пировального д атчика 1, пред варительного усилителя - выпрямителя 2, регу лятора чувствительнос ти д атчика 3, преобразователя, уровня 4, блока выделения моду ля с игнала 5, усилителя 6 и 9, зад ающего и с лед ящ его 30 каналов соответс твенно, блоков нелинейнос ти 7 и 10 и э лектропривод ов зад ающ ей и след ящ ей подачи 8 и 11, причем вых од датчика 1 подсоединен ко входу предварительного у с илителя - вып рями те ля 2, вых од 35 которого подключен на вход регу лятора чув ствительнос ти д атчика 3, выход регулятора чувс твительнос ти 3 под ключен на первый вход преобразователя у ровня 4, на второй вход которого подключено пос тоянное с ме- 40 щение, вых од преобразователя 4 подключе н н а вх од б л о к а в ыд е л е н ия м од у л я с игнала 5 и на вх од ус илителя с лед ящего канала 9, вых од блока выделения мод у ля сигнала 5 подключен к первому входу усили- 45 теля зад ающ его канала 6, на второй вх од которого под ключено пос тоянное с мещ ение, блоки нелинейнос ти 7 и 10 включены в цепь обратной с вязи ус илителей 6 и 9, а их вых од ы подс оед инены на вх од ы э лектро- 50 привод ов 8 и 11 зад ающего и с лед ящ его каналов. Применение данной сис темы имеет с ледующие преимущес тва. Как извес тно, д ля обес печения необх одимой точнос ти в ид е- 55 альном случае радиус копировального пальца датчика должен быть больш е радиуса режущего инс трумента на величину равную половине полного отклонения копировального пальца. Изменение чу вс твительнос ти датчика равнос ильно изменению рад иус а копировального пальца. Эта завис имос ть ис пользу ется д ля коррекции ош ибки копирования, д ля чего регу лятор чувс твительности д атчика снабжен шкалой в д олях мм. В то же время увеличение чувс твитель нос ти д атчика у величивают коэ ффициент усиления вс ей сис темы, что мож ет привес ти к автоколебаниям. Снабдив регу лятор чув ствительнос ти датчика второй шкалой допус ти мых п од ач в мм/ м ин. , пр евыш ен ие которых вызывает автоколебания в системе, у прощ аем налад ку реж има копирования при черновых (скорос тных ) работах. Шкалы размещены на двух дугах разного д иаметра в од ном с екторе регу лятора. Регу лятор чувс твительнос ти д атчика 3 выполнен в вид е потенциометра образованного набором резис торов на заданное чис ло сту пеней и щеточного переключателя. Расчет производится по заданному диапазону поправок и д ис крете, например, 0,01 мм. Расчетные значения поправок наносятся на первую шкалу. Так как рассчитать величину максимальной под ачи, гд е обес печивается ус тойчивос ть с ис темы с ложно, то вторая шкал а нанос ится при выпуске и испытании с танка. Прео браз ова те ль у ровня с игнала 4 пред с тавляет с обой операционный ус илитель со смещением сигнала, что необходимо для формирования управляющего с игнала зад ающей и с лед ящей под ачи. Блок выделения моду ля 5 выполнен на операционном ус илителе и предс тавляет собой прецизионный выпрямитель. Нелинейные блоки 7 и 10 выполнены на делителях напряжения и д иод ах. Сис тема работает с ледующим образом; В исход ном положении копировальный палец 1 не кас ается копира и выход сигналов с пред варительного усилителя 2 равен нулю. При нажатии копира на д атчик 1 его копировальный палец отклоняется на величину д. К ак с леду ет из фиг 2 сигнал Up на выходе регулятора чувс твительнос ти датчика 3,изменяется пропорционально отклонению копировального пальца д атчика 1. Этот сигнал суммируется на вход е преобразователя у ровня 4 с с игналом U CM И образует на вых од е смещенное по уровню напряжение Un, которое пос тупает на канал задающей и следящ ей подачи: Un, пос тупая на вход усилителя 9, имеющего в цепи обратной связи нелинейный блок 10, преобразуется в напряж ение Uc пропорциональное кос инус у отклонения д копировального 9773 пальца и управляет электроприводом следящего канала. Напряжение Un поступает на вход блока выделения модуля 5 и преобразуется в однополярное напряжение UB, которое подается на первый вход усилителя 6, на второй вход которого подключено постоянное смещение. Выходное напряжение из усилителя 6 пропорционально синусу отклонения копировального пальца*д и подается на 10 управление приводом задающей подачи. Выбором наклона отрезков и точек перегиба кусочно-ломаной кривой зависимости U3 - f{6) и Uc = f( б) получаем U3 * Uo sin(5 и Uc - Uo * cos
ДивитисяДодаткова інформація
Назва патенту англійськоюSlave servosystem for proportional control for machining units
Автори англійськоюDubrov Borys Ivanovych, Lavrynenko Anatolii Kostiantynovych
Назва патенту російськоюКопировальная следящая система пропорционального управления для металлорежущих станков
Автори російськоюДубров Борис Иванович, Лавриненко Анатолий Константинович
МПК / Мітки
МПК: B23Q 35/00
Мітки: керування, металорізальних, верстатів, система, копіювальна, пропорційного, слідкуюча
Код посилання
<a href="https://ua.patents.su/5-9773-kopiyuvalna-slidkuyucha-sistema-proporcijjnogo-keruvannya-dlya-metalorizalnikh-verstativ.html" target="_blank" rel="follow" title="База патентів України">Копіювальна слідкуюча система пропорційного керування для металорізальних верстатів</a>
Стереофонічна акустична система
Номер патенту: 5697
Опубліковано: 28.12.1994
Автор: Осадців Олексій Іванович
МПК: H04S 3/00
Мітки: акустична, система, стереофонічна
Формула / Реферат:
Стереофоническая акустическая система, содержащая два громкоговорителя средне-высоких частот и один громкоговоритель низких частот, включающие две головки громкоговорителей средне-высоких частот и одну головку громкоговорителя низких частот, низкочастотный трансформатор, два конденсатора, причем один из конденсаторов соединен параллельно с головкой громкоговорителя низких частот, две выходные клеммы первого и второго каналов, связанные с...
Система передачі і прийому сигналів виклику
Номер патенту: 4434
Опубліковано: 27.12.1994
Автор: Голуб Віктор Миколайович
МПК: H04B 15/02
Мітки: прийому, передачі, сигналів, система, виклику
Формула / Реферат:
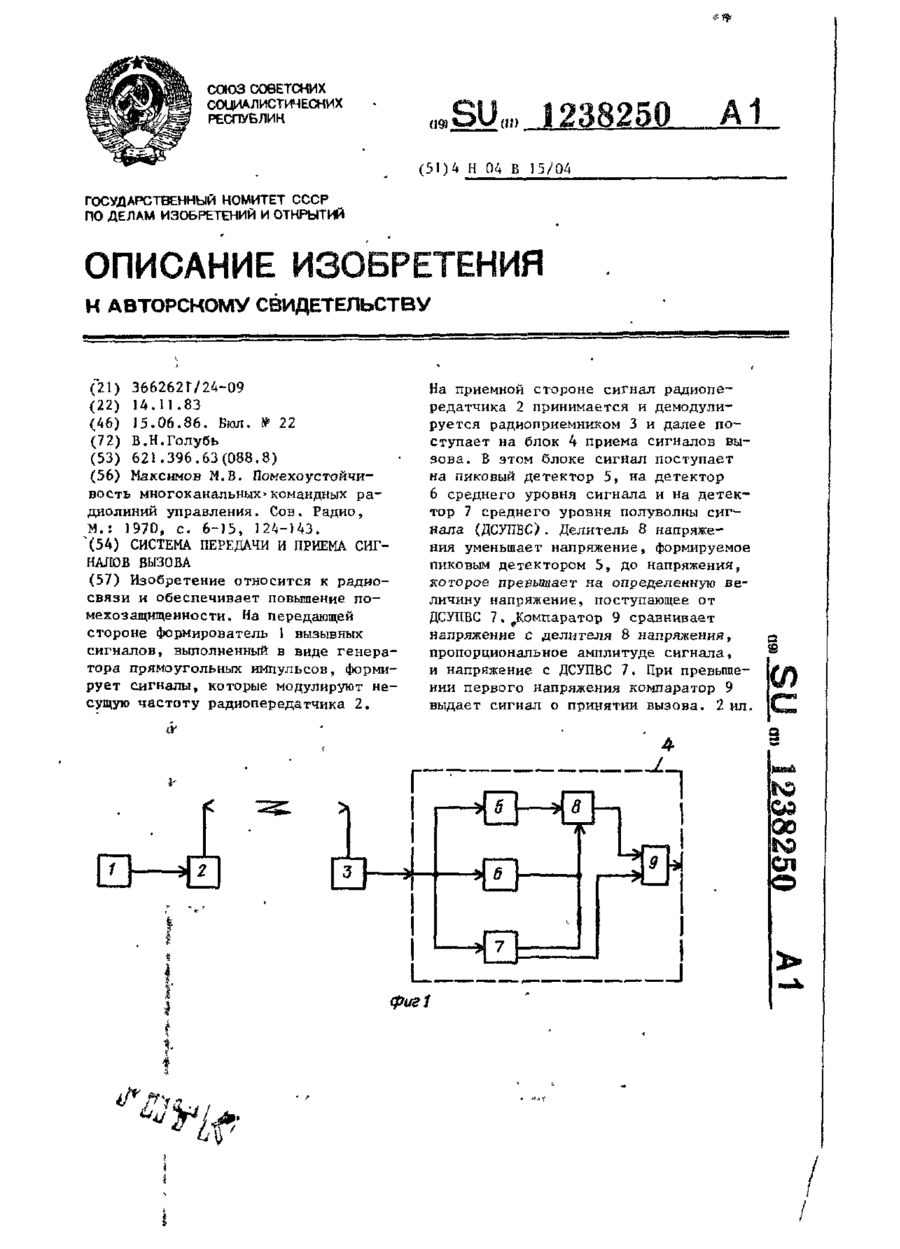
Система передачи и приема сигналов вызова, содержащая на передающей стороне последовательно соединенные формирователь вызывных сигналов и радиопередатчик, а на приемной стороне - радиоприемник, выход которого соединен с входом блока приема сигнала вызова, который содержит пиковый детектор, вход которого является входом блока приема сигнала вызова, отличающаяся тем, что, с целью повышения помехоза.щищен-ности, на передающей стороне...
Пристрій для керування вентильним перетворювачем
Номер патенту: 8823
Опубліковано: 30.09.1996
Автори: Волков Олександр Васильович, Грінченко Олександр Семенович, Бородай Олег Ігоревич
МПК: H02M 7/12
Мітки: пристрій, керування, вентильним, перетворювачем
Формула / Реферат:
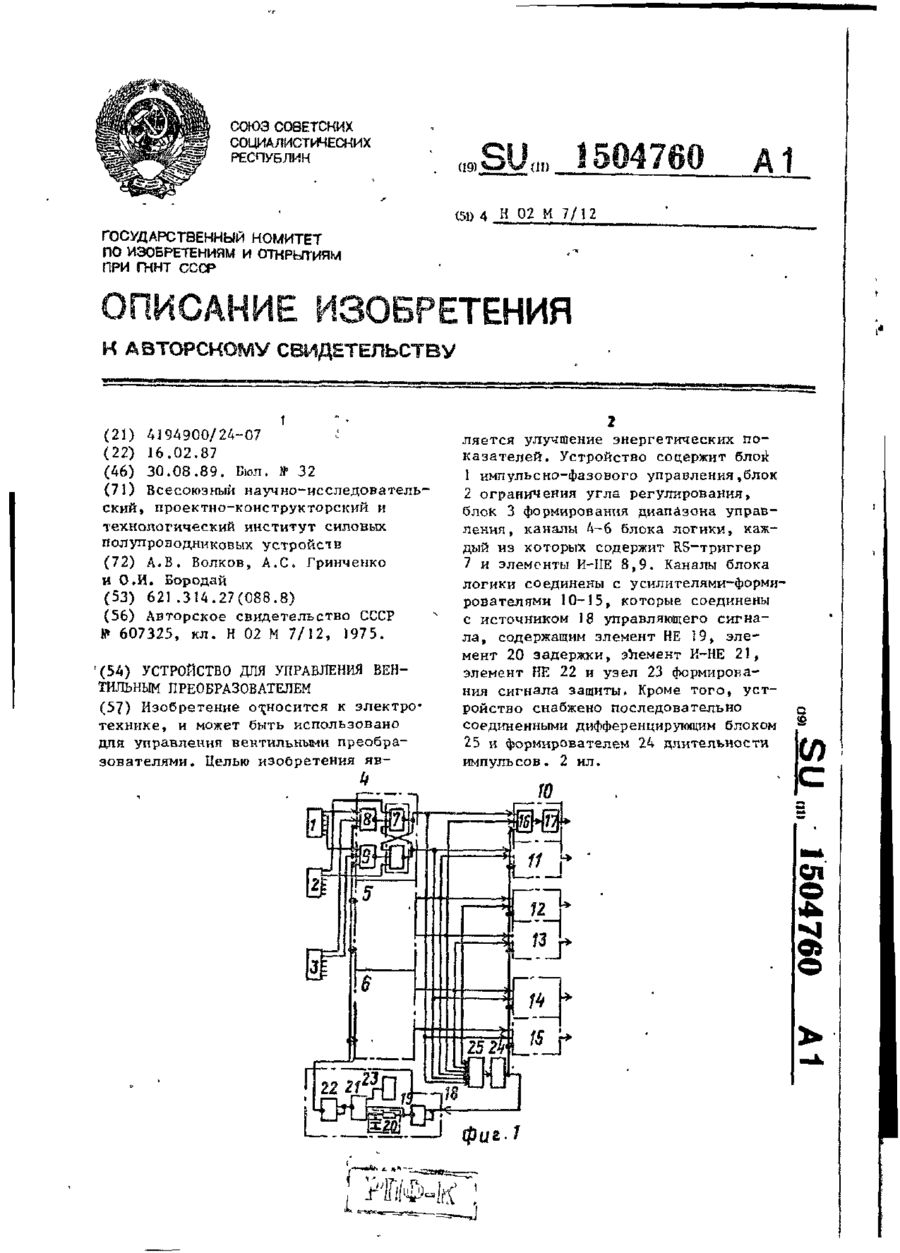
Устройство для управления вентильным преобразователем, содержащее многофазный блок импульсно-фазового управления, блок ограничения максимального угла регулирования, блок формирования диапазона управления, трехканальный блок логики, содержащий в каждом канале RS-триггер и первый элемент И-НЕ, первый вход которого подключен к соответствующему нечетному выходу многофазного блока импульсно-фазового управления, второй вход - к соответствующему...
Пристрій для керування поляризацією електромагнітної хвилі
Номер патенту: 8176
Опубліковано: 29.03.1996
Автор: Касьянов Сергій Володимирович
МПК: H03C 7/00
Мітки: пристрій, хвилі, електромагнітної, поляризацією, керування
Формула / Реферат:
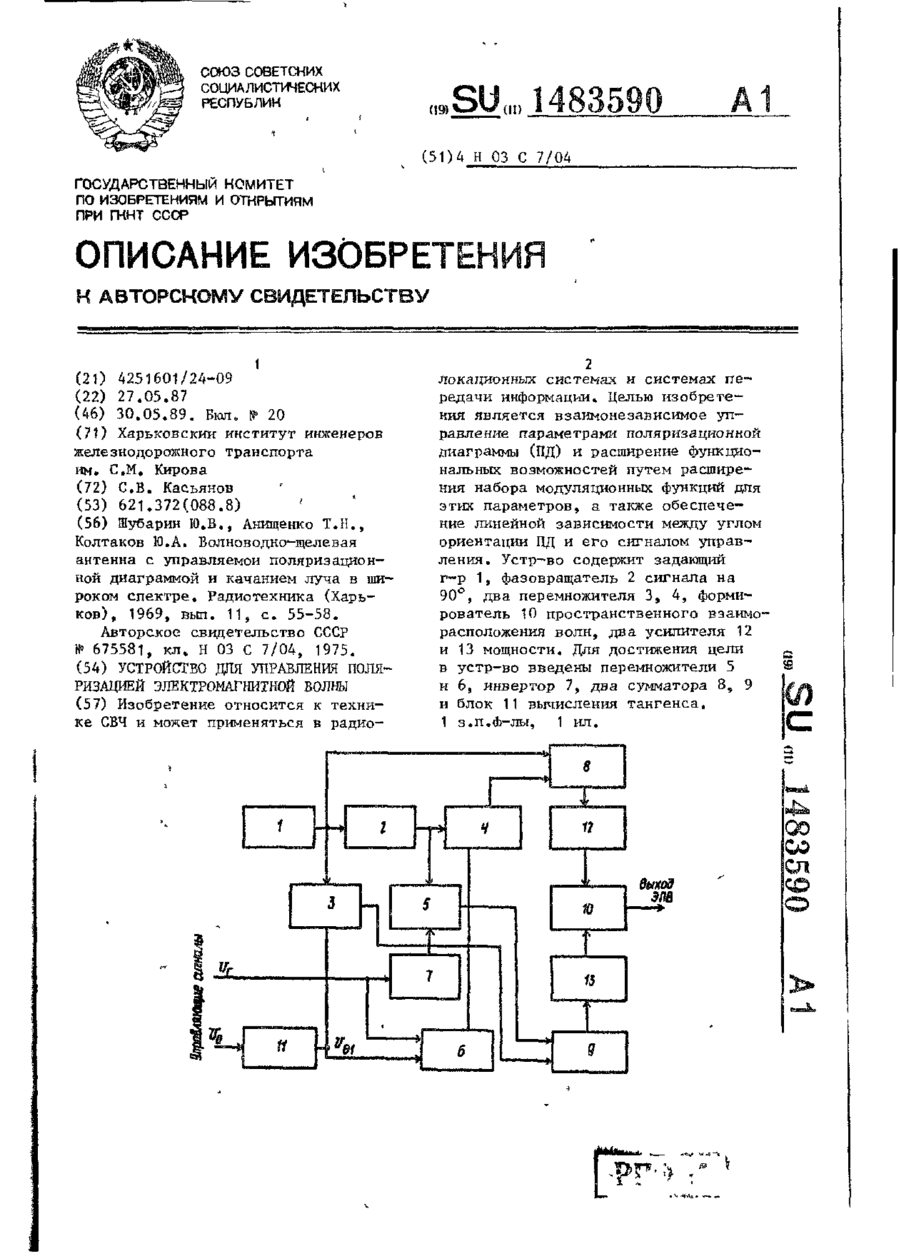
1. Устройство для управления поляризацией электромагнитной волны, содержащее задающий генератор, выход которого подключен к первому входу первого перемножителя, фазовращатель на 90°, второй персмножитсль и формирователь пространственного взаиморасположения волн, выход которого является выходом устройства, отличающееся тем, что, с целью взаимонезависимого управления параметрами поляризационной диаграммы и расширения функциональных...
Спосіб визначення еквівалентної шумової температури входу підсилювача
Номер патенту: 9421
Опубліковано: 30.09.1996
Автори: Бережний Василь Олексійович, Очковський Ігор Іванович, Петровський Віктор Олександрович
МПК: G01R 29/00
Мітки: температури, еквівалентної, шумової, визначення, підсилювача, спосіб, входу
Формула / Реферат:
Способ определения эквивалентной шумовой температуры входа усилителя путем измерения в заданной полосе пропускания уровня P1 мощности шумового сигнала на выходе согласованного по входу и аттестованного по эквивалентной шумовой температуре Тша входа опорного усилителя, подачи шумового сигнала с выхода согласованного по входу измеряемого усилителя на вход упомянутого опорного усилителя и измерения в упомянутой заданной полосе пропускания...
Попередній патент: Спосіб визначення температури
Наступний патент: Перетворювач неелектричної величини в електричний сигнал
Випадковий патент: Спосіб виготовлення емульсійної протипастерельозної вакцини