Спосіб ультразвукового неруйнівного контролю залізничних рейок на рейсових швидкостях
Номер патенту: 97744
Опубліковано: 10.04.2015
Автори: Цапенко Володимир Кузьмич, Канівець Дмитро Володимирович, Івіцька Дар'я Костянтинівна

Формула / Реферат
Спосіб ультразвукового неруйнівного контролю залізничних рейок на рейсових швидкостях, що включає при наявності сигналу допплерівського зміщення операції визначення залежності доплерівського зміщення від часу, який відрізняється тим, що при зменшенні відносного допплерівського зміщення від ![]() до
до ![]() за інтервал часу
за інтервал часу ![]() глибина залягання дефекту
глибина залягання дефекту ![]() визначається за формулою:
визначається за формулою:
 ,
,
де ![]() - рейсова швидкість потяга.
- рейсова швидкість потяга.
Текст
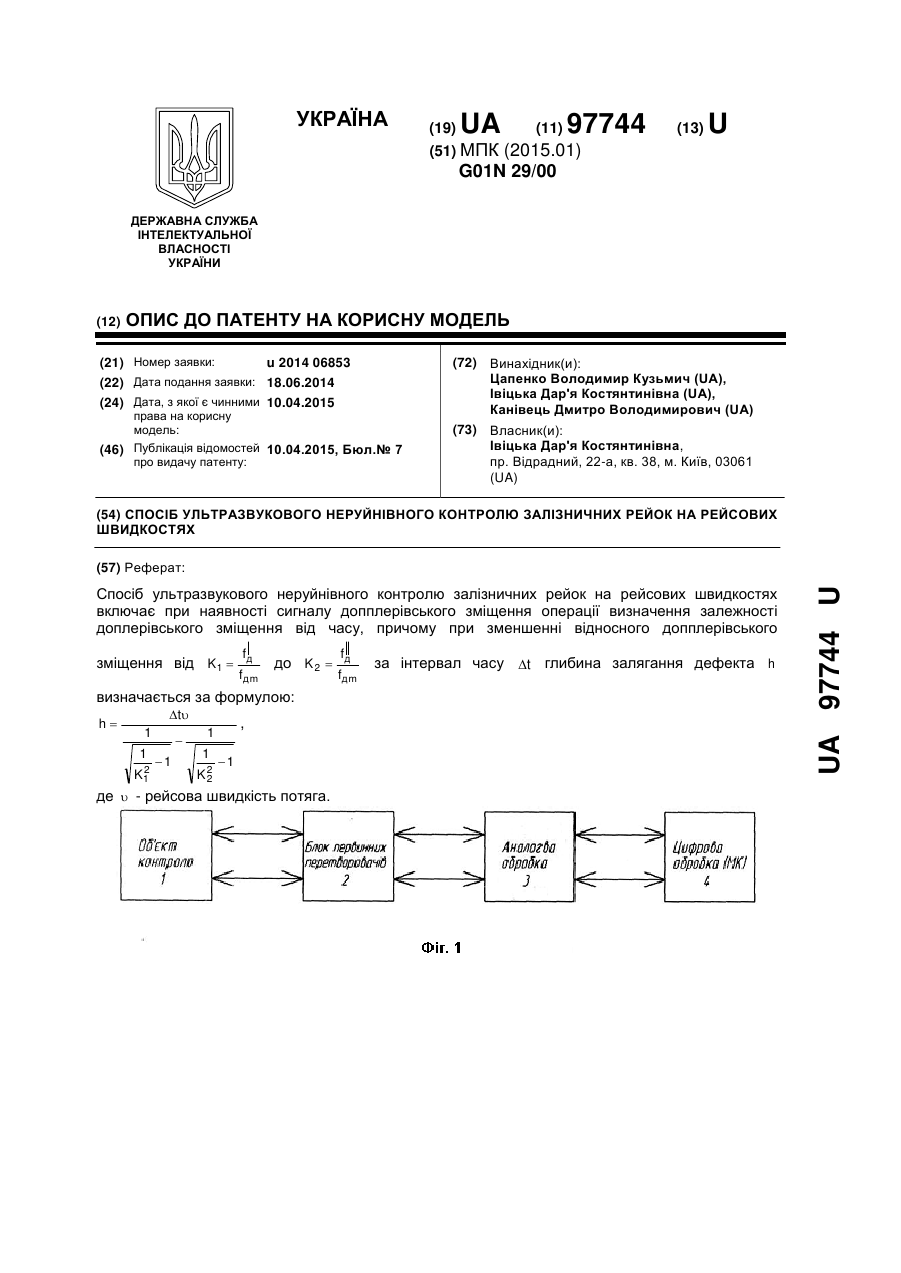
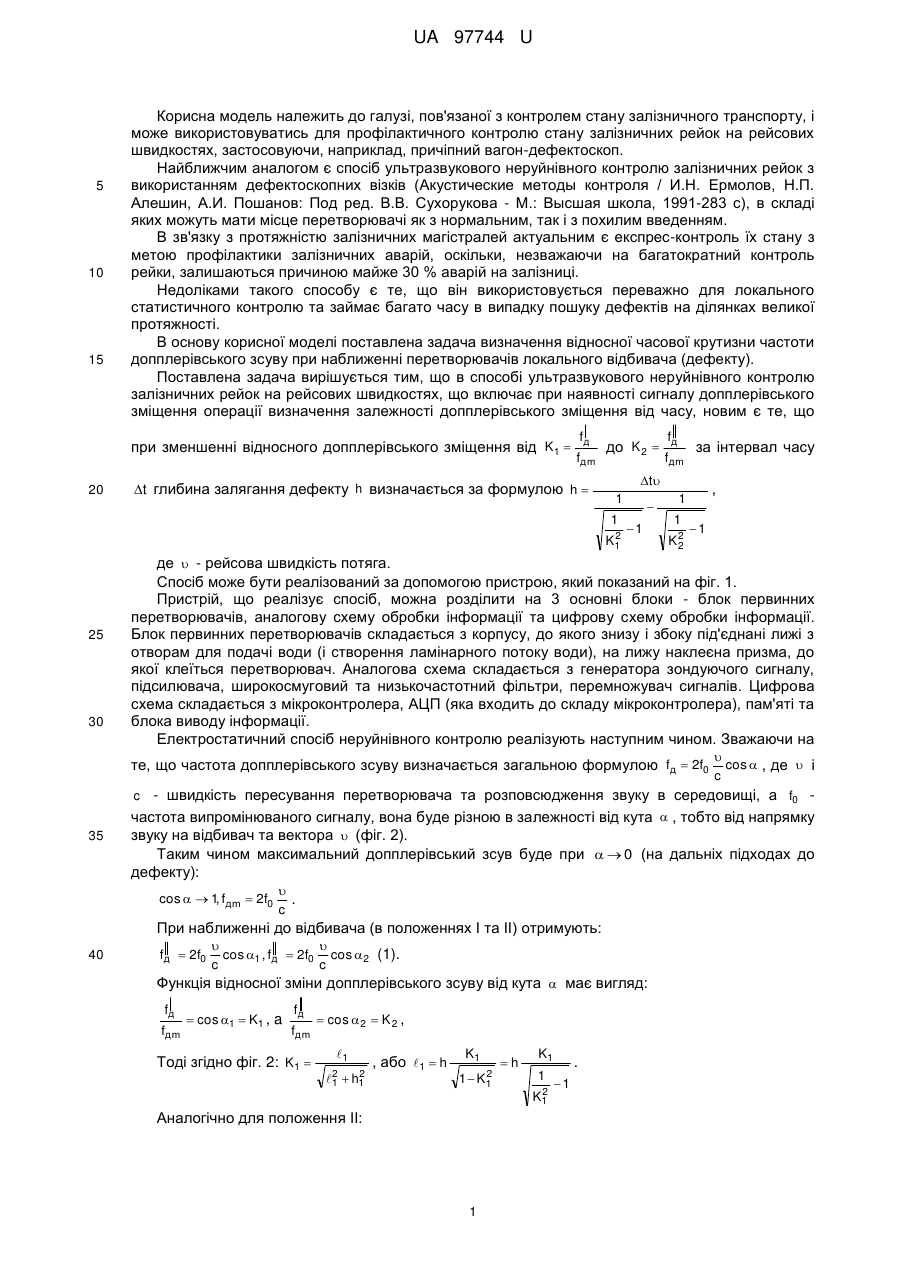
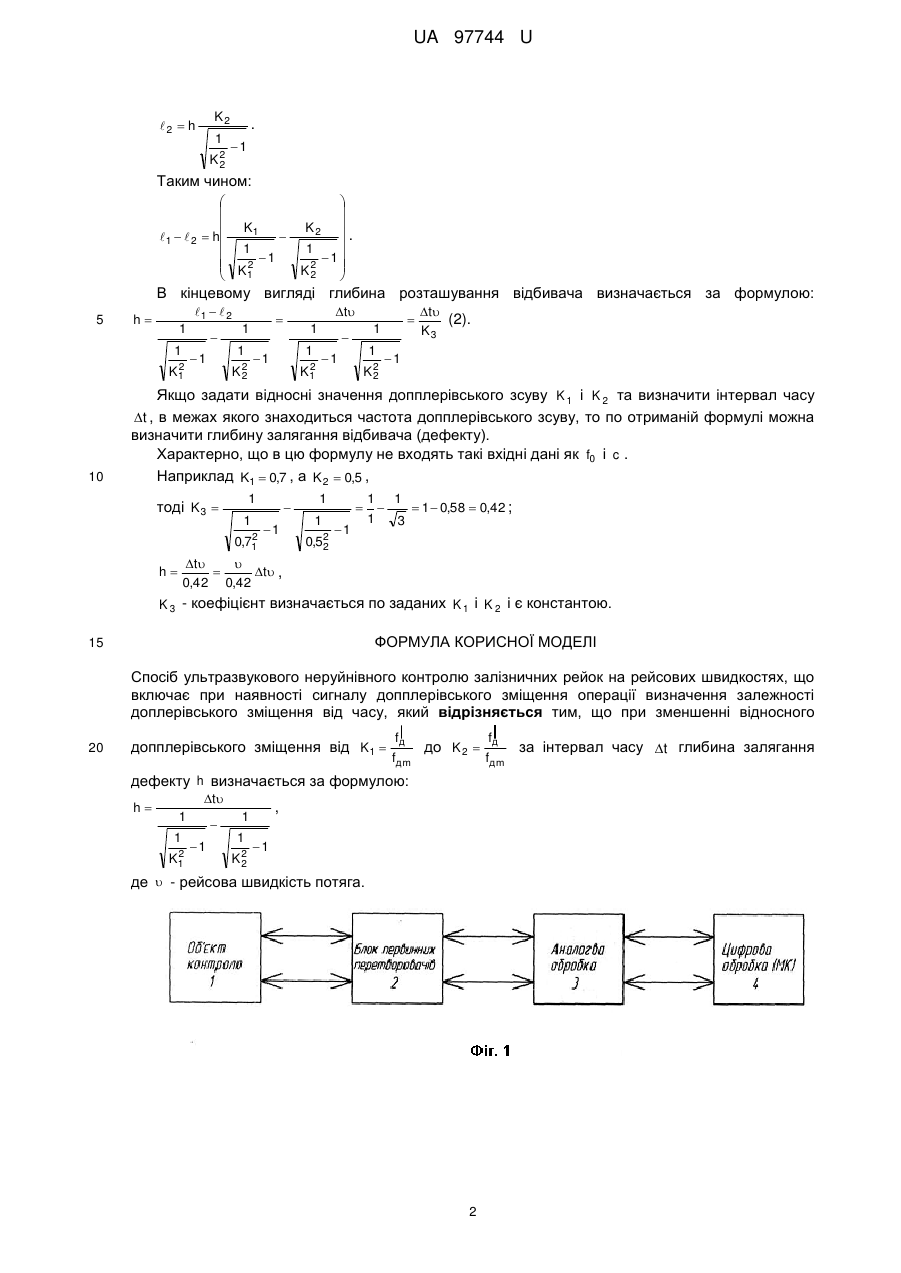
Реферат: UA 97744 U UA 97744 U 5 10 15 Корисна модель належить до галузі, пов'язаної з контролем стану залізничного транспорту, і може використовуватись для профілактичного контролю стану залізничних рейок на рейсових швидкостях, застосовуючи, наприклад, причіпний вагон-дефектоскоп. Найближчим аналогом є спосіб ультразвукового неруйнівного контролю залізничних рейок з використанням дефектоскопних візків (Акустические методы контроля / И.Н. Ермолов, Н.П. Алешин, А.И. Пошанов: Под ред. В.В. Сухорукова - М.: Высшая школа, 1991-283 с), в складі яких можуть мати місце перетворювачі як з нормальним, так і з похилим введенням. В зв'язку з протяжністю залізничних магістралей актуальним є експрес-контроль їх стану з метою профілактики залізничних аварій, оскільки, незважаючи на багатократний контроль рейки, залишаються причиною майже 30 % аварій на залізниці. Недоліками такого способу є те, що він використовується переважно для локального статистичного контролю та займає багато часу в випадку пошуку дефектів на ділянках великої протяжності. В основу корисної моделі поставлена задача визначення відносної часової крутизни частоти допплерівського зсуву при наближенні перетворювачів локального відбивача (дефекту). Поставлена задача вирішується тим, що в способі ультразвукового неруйнівного контролю залізничних рейок на рейсових швидкостях, що включає при наявності сигналу допплерівського зміщення операції визначення залежності допплерівського зміщення від часу, новим є те, що при зменшенні відносного допплерівського зміщення від K1 20 fд fдm t глибина залягання дефекту h визначається за формулою h до K 2 2 K1 30 за інтервал часу t 1 1 25 fд fдm 1 , 1 1 K2 2 1 де - рейсова швидкість потяга. Спосіб може бути реалізований за допомогою пристрою, який показаний на фіг. 1. Пристрій, що реалізує спосіб, можна розділити на 3 основні блоки - блок первинних перетворювачів, аналогову схему обробки інформації та цифрову схему обробки інформації. Блок первинних перетворювачів складається з корпусу, до якого знизу і збоку під'єднані лижі з отворам для подачі води (і створення ламінарного потоку води), на лижу наклеєна призма, до якої клеїться перетворювач. Аналогова схема складається з генератора зондуючого сигналу, підсилювача, широкосмуговий та низькочастотний фільтри, перемножувач сигналів. Цифрова схема складається з мікроконтролера, АЦП (яка входить до складу мікроконтролера), пам'яті та блока виводу інформації. Електростатичний спосіб неруйнівного контролю реалізують наступним чином. Зважаючи на cos , де і c c - швидкість пересування перетворювача та розповсюдження звуку в середовищі, а f0 те, що частота допплерівського зсуву визначається загальною формулою fд 2f0 35 частота випромінюваного сигналу, вона буде різною в залежності від кута , тобто від напрямку звуку на відбивач та вектора (фіг. 2). Таким чином максимальний допплерівський зсув буде при 0 (на дальніх підходах до дефекту): cos 1 fдm 2f0 , . c При наближенні до відбивача (в положеннях І та II) отримують: 40 fд 2f0 cos 1 , fд 2f0 cos 2 (1). c c Функція відносної зміни допплерівського зсуву від кута має вигляд: fд fдm cos 1 K1 , a fд fдm Тоді згідно фіг. 2: K1 cos 2 K 2 , 1 2 2 1 h1 , або 1 h K1 2 1 K1 Аналогічно для положення II: 1 h K1 1 2 K1 . 1 UA 97744 U K2 2 h 1 K2 2 . 1 Таким чином: K 1 1 2 h 1 1 2 K1 K2 . 1 1 2 K2 В кінцевому вигляді глибина розташування відбивача визначається за формулою: 5 1 2 h 1 1 2 K1 1 1 t 1 1 1 1 K2 2 2 K1 1 1 1 K2 2 t (2). K3 1 Якщо задати відносні значення допплерівського зсуву K 1 і K 2 та визначити інтервал часу t , в межах якого знаходиться частота допплерівського зсуву, то по отриманій формулі можна 10 визначити глибину залягання відбивача (дефекту). Характерно, що в цю формулу не входять такі вхідні дані як f0 і c . Наприклад K1 0,7 , а K 2 0,5 , тоді K3 1 1 2 0,71 1 1 1 0,52 2 1 1 1 1 0,58 0,42 ; 1 3 t t , 0,42 0,42 h K 3 - коефіцієнт визначається по заданих K 1 і K 2 і є константою. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Спосіб ультразвукового неруйнівного контролю залізничних рейок на рейсових швидкостях, що включає при наявності сигналу допплерівського зміщення операції визначення залежності доплерівського зміщення від часу, який відрізняється тим, що при зменшенні відносного 20 допплерівського зміщення від K1 fд fдm до K 2 дефекту h визначається за формулою: h t 1 1 2 K1 1 , 1 1 K2 2 1 де - рейсова швидкість потяга. 2 fд fдm за інтервал часу t глибина залягання UA 97744U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюTsapenko Volodymyr Kuzmych
Автори російськоюЦапенко Владимир Кузьмич
МПК / Мітки
МПК: G01N 29/00
Мітки: контролю, рейсових, спосіб, швидкостях, залізничних, ультразвукового, рейок, неруйнівного
Код посилання
<a href="https://ua.patents.su/5-97744-sposib-ultrazvukovogo-nerujjnivnogo-kontrolyu-zaliznichnikh-rejjok-na-rejjsovikh-shvidkostyakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб ультразвукового неруйнівного контролю залізничних рейок на рейсових швидкостях</a>
Спосіб розробки екзаменаційного зразка з ультразвукового методу неруйнівного контролю
Номер патенту: 91005
Опубліковано: 25.06.2014
Автори: Хорло Микола Федорович, Маслова Марія Сергіївна, Сергєєва Наталія Альбертівна
МПК: G01N 29/00
Мітки: методу, неруйнівного, розробки, зразка, ультразвукового, контролю, спосіб, екзаменаційного
Формула / Реферат:
Спосіб виготовлення екзаменаційного зразка для проведення кваліфікаційного іспиту у фахівців з ультразвукового неруйнівного контролю, який включає вибір типу конструктивного вузла, вибір матеріалу заготовок для зразка, придання заготовкам відповідної форми, ультразвуковий контроль матеріалу заготовок і прийняття рішення про їх придатність для виготовлення зразка, зварювання заготовок зразка за встановленою технологією, виготовлення в...
Спосіб випробування на контактну взаємодію залізничних рейок і коліс
Номер патенту: 93375
Опубліковано: 25.09.2014
Автори: Оправхата Микола Якович, Новогрудський Леонід Самуілович, Стрижало Володимир Олександрович, Срипник Юрій Дмитрович
МПК: G01N 33/20, G01M 7/00, G01N 3/56
Мітки: контактну, спосіб, випробування, взаємодію, залізничних, рейок, коліс
Формула / Реферат:
Спосіб випробування на контактну взаємодію залізничних рейок і коліс, під час якого зразок-фрагмент рейки обкочують натискним роликом у поздовжньому напрямку і реєструють параметри навантаження, деформування та ознаки руйнування, за якими визначають стан контактної зони, який відрізняється тим, що натискний ролик виготовляють у вигляді зразка-фрагмента реального залізничного колеса із збереженням параметрів його робочих поверхонь і циклічно...
Пристрій для електричного стикового з’єднання залізничних рейок
Номер патенту: 1422
Опубліковано: 15.10.2002
Автори: Шаповалов Сергій Федорович, Фойгель Веніамін Абрамович, Горохова Ніна Григорівна, Руббен Микола Антонович
МПК: H01R 3/00
Мітки: електричного, залізничних, пристрій, рейок, стикового, з'єднання
Формула / Реферат:
Пристрій для електричного стикового з'єднання залізничних рейок, що складається з мідного проводу та штепселя з циліндричним отвором у головці, який відрізняється тим, що містить сталевий канат, вставлений у конічний отвір головки штепселя, кінець якого закріплений штифтом і приварений разом зі штифтом до поверхні головки.
Спосіб виготовлення протиугона пружинного до залізничних рейок
Номер патенту: 38823
Опубліковано: 26.01.2009
Автори: Сапон Сергій Миколайович, Цюрюпа Володимир Іванович, Тимофеєва Лариса Андріївна
МПК: E01B 13/00
Мітки: залізничних, спосіб, пружинного, протиугона, рейок, виготовлення
Формула / Реферат:
Спосіб виготовлення протиугона пружинного до залізничних рейок, який виготовляють штамповкою з наступною термічною обробкою, яка включає закалку і середній відпуск, а як заключний етап - механічну обробку, який відрізняється тим, що розмір перерізу заготівки протиугона становить 22 мм, та здійснюють додаткову механічну обробку перед штамповкою.
Спосіб ультразвукового контролю якості багатошарової конструкції
Номер патенту: 30055
Опубліковано: 15.11.2000
Автор: Кононенко Марина Андріївна
МПК: G01N 29/04
Мітки: конструкції, багатошарової, ультразвукового, контролю, якості, спосіб
Формула / Реферат:
Спосіб ультразвукового контролю якості багатошарової конструкції при односторонньому доступі, який полягає в тому, що випромінюючим п'єзоперетворювачем, орієнтованим під певним кутом до зовнішньої поверхні, в конструкції збуджують поздовжні ультразвукові хвилі, які після відбиття від зони з'єднання, від дефекту або від протилежної (донної) поверхні приймають приймаючим п'єзоперетворювачем, розташованим на зовнішній поверхні на певній відстані...
Попередній патент: Шахтна водовідливна установка
Наступний патент: Спосіб раннього виявлення злоякісних новоутворень молочних залоз
Випадковий патент: Магнітний двигун на постійних магнітах конструкції і.м. федоткіна