Кореляційно-екстремальна навігаційна система з функцією оперативного картографування
Номер патенту: 98729
Опубліковано: 12.05.2015

Формула / Реферат
Кореляційно-екстремальна навігаційна система з функцією оперативного картографування, яка містить датчик геофізичного поля, картографічний блок, корелятор, автоматичний оптимізатор, блок картографічної прив'язки, комплексовану навігаційну систему та блок комплексування інформації, яка відрізняється тим, що має блок прийняття рішення, який визначає достовірність виміряних параметрів геофізичного поля відносно поточної картографічної інформації, та блок оперативного картографування, який виділяє аномальну складову геофізичного поля та здійснює уточнення карти.
Текст
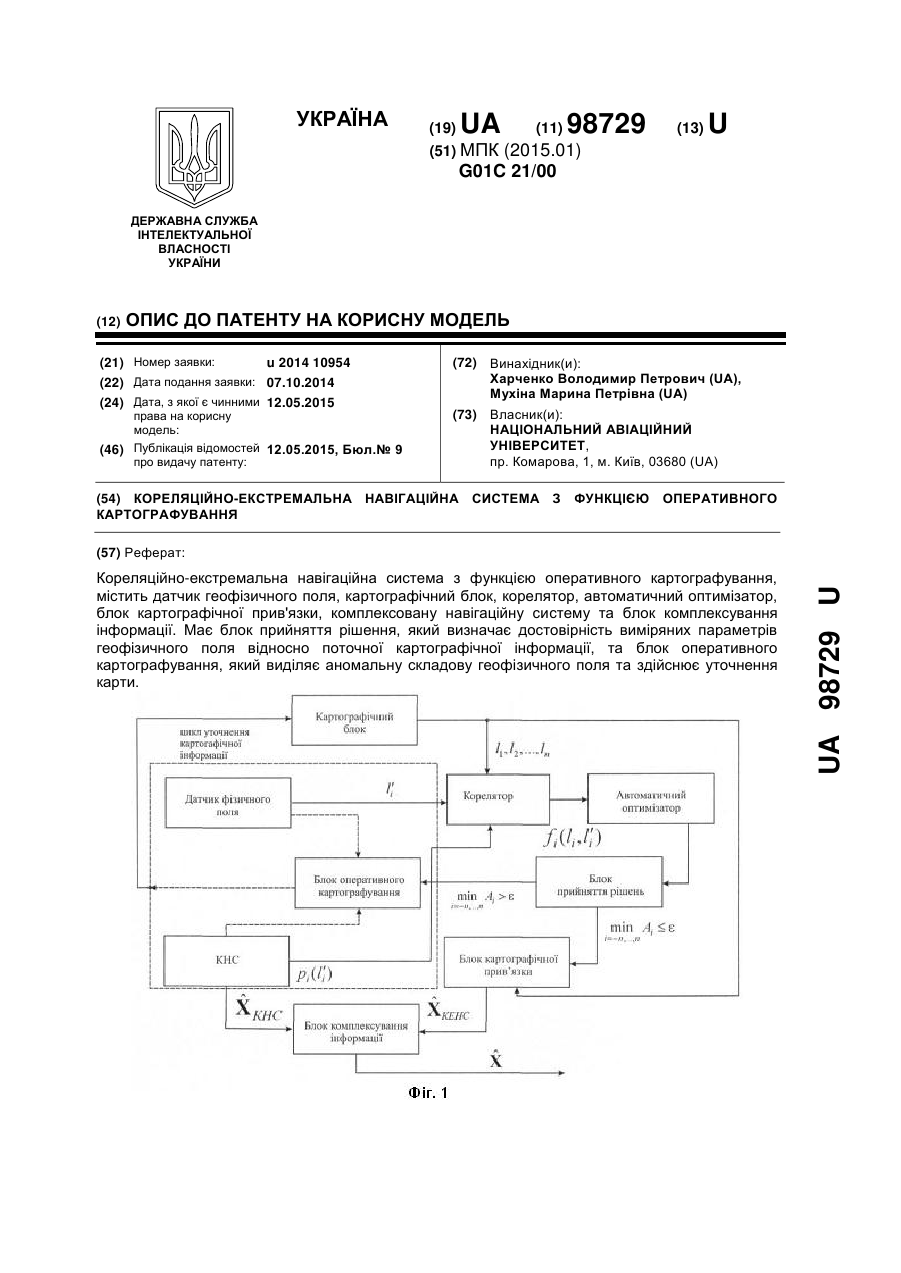
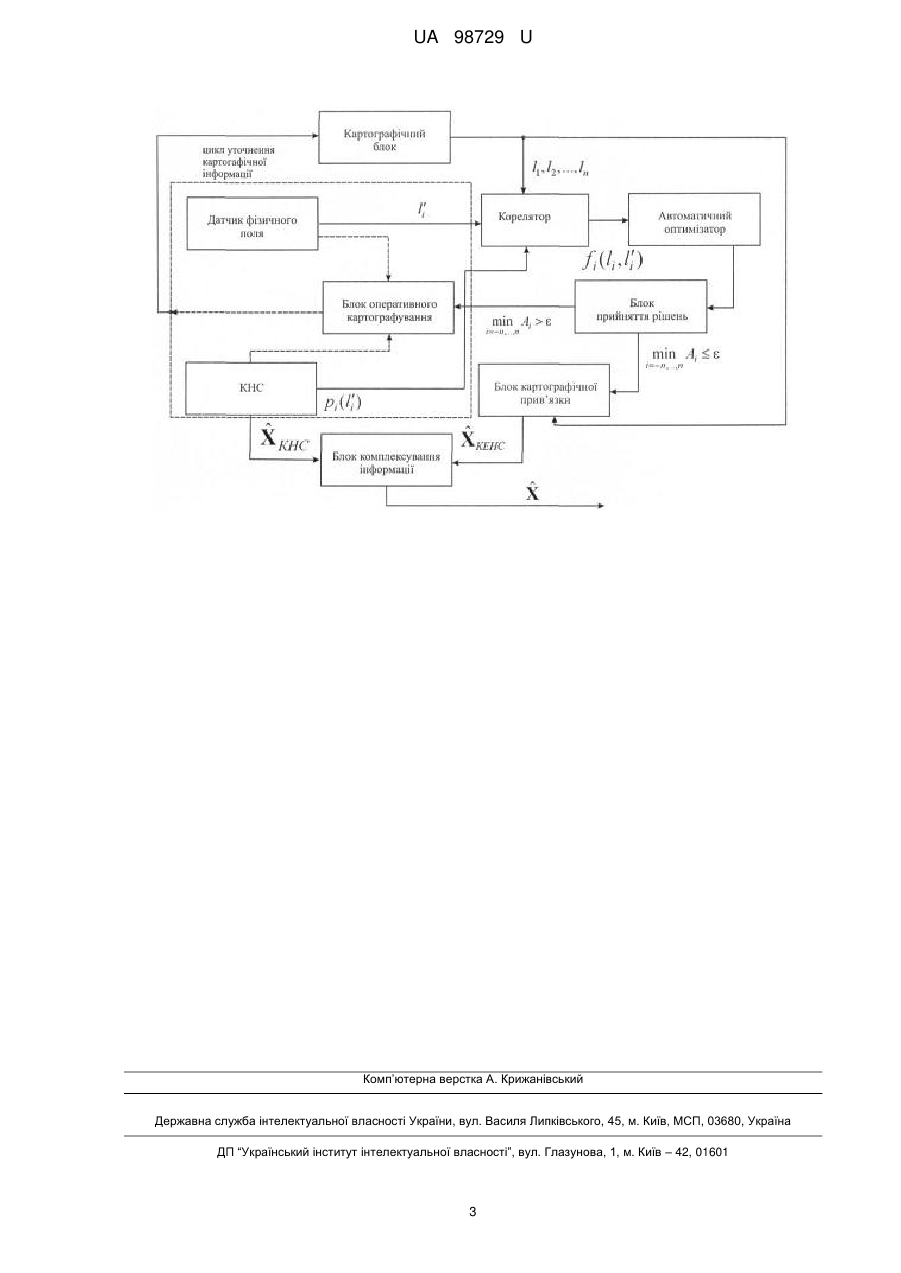
Реферат: UA 98729 U UA 98729 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі автономних навігаційних засобів, зокрема класу кореляційно-екстремальних навігаційних систем (КЕНС), що ґрунтуються на однозначній відповідності розподілення аномального геофізичного поля певній ділянці земної поверхні. Відома комплексна кореляційна система [1] включає декілька датчиків поля, що генерують дані у вигляді кадру. Шляхом кореляційного порівняння поточних даних з еталонними відбувається позиціонування об'єкта та використання даних у корекції інших навігаційних систем, зокрема інерційної навігаційної системи. Проте у випадку значної початкової невизначеності або шумів вимірювання та системи можливе отримання нестійкого навігаційного рішення через невідповідність поточної реалізації поля еталонній. Відома кореляційна система [2] представляє карту геофізичного поля у вигляді ділянки шляху об'єкта. При русі об'єкта відбувається вимірювання параметру поля (висоти рельєфу) та порівняння поточних даних з картографічними. Результатом порівняння є значення коефіцієнта кореляції, максимум якого знаходиться та використовується для отримання навігаційного рішення. Так само, існує можливість отримання некоректного навігаційного рішення через відсутність функції уточнення картографічних даних. Задачею корисної моделі є підвищення точності навігації, забезпечення автономності та уточнення наявної картографічної інформації аномального геофізичного поля за рахунок використання у складі КЕНС блока прийняття рішень, який визначає достовірність виміряних параметрів геофізичного поля відносно поточної картографічної інформації, та блока оперативного картографування, який виділяє аномальну складову геофізичного поля та здійснює уточнення карти. Поставлена задача вирішується тим, що кореляційно-екстремальна навігаційна система з функцією оперативного картографування, яка містить датчик геофізичного поля, картографічний блок, корелятор, автоматичний оптимізатор, блок картографічної прив'язки, комплексовану навігаційну систему та блок комплексування інформації, згідно з корисною моделлю містить блок прийняття рішення, який визначає достовірність виміряних параметрів геофізичного поля відносно поточної картографічної інформації, та блок оперативного картографування, який виділяє аномальну складову геофізичного поля та здійснює уточнення карти. Пропонована КЕНС (Фіг. 1) включає такі наступні елементи: датчик(и) геофізичного поля; картографічний блок; корелятор; автоматичний оптимізатор; блок картографічної прив'язки; комплексована навігаційна система (КНС); блок прийняття рішень; блок оперативного картографування; блок комплексування інформації [3]. Датчик геофізичного поля видає інформацію у вигляді поточної реалізації поля li' , яка представляється у вигляді дискретних точкових даних, протяжних лінійних або у вигляді кадру, залежно від обраного типу аномального геофізичного поля. Для першого варіанту зондування параметр поля знімається у вигляді скалярної величини в кожен момент часу, використовуються обидва типи полів як поверхневі, так і просторові. Для другого варіанту зондування датчик вимірює параметри поля вздовж довільно вибраної лінії моментально або протягом короткого періоду часу. Для третього варіанту параметри поля вимірюються з ділянки земної поверхні протягом короткого циклу сканування. Картографічний блок містить інформацію про еталонної реалізації поля l1 , l2 ,…, ln , які представляються у вигляді регулярної або нерегулярної сітки, у вигляді ізоліній або ж аналітичною моделлю. Корелятор здійснює обчислення значення кореляційної функції fi (li,li' ) для кожного еталона, що зберігається в пам'яті, або ж, у разі наявності апріорного знання маршруту польоту, обчислення кореляційної функції тільки для одного еталона. В останньому випадку, наявність автоматичного оптимізатора необов'язкова, оскільки немає необхідності шукати екстремум (максимум) кореляційних функцій пар еталонної і поточної реалізацій поля. Комплексована навігаційна система (КНС) забезпечує апріорну інформацію про поточне місцеположення об'єкту. З урахуванням похибок КНС на вхід корелятора надходить апріорна ймовірність місця розташування об'єкта у вигляді ймовірності збігу поточної реалізації поля з деякою еталонною pi (li' ) . Також з виходу КНС в блок комплексування інформації надходить 55 оцінка вектора стану ˆ XKHC , що уточнюється з використанням попередньої навігаційної ˆ інформації від КЕНС з блоку картографічної прив'язки XKEHC . 1 UA 98729 U 5 Перевіряються гіпотези про можливе місцезнаходження рухомого об'єкта за інформацією від КНС [3]. Достовірність кожної гіпотези визначається значенням функціоналу як міри близькості (схожості) між отриманою в польоті реалізацією поля і реалізацією поля, отриманою з пам'яті картографічного блока. При наявності значних неточностей картографічної інформації ризик прийняття помилкової гіпотези зростає. Вводиться вирішуюча функція, яка визначається для кожної і-ої гіпотези - A i та порогове значення припустимого ризику прийняття хибних гіпотези. Функція блока прийняття рішень (Фіг. 1) полягає у визначенні достовірності навігаційного рішення за прийнятим вирішуючим правилом. Якщо знайдена гіпотеза, що задовольняє умові min A i , то дані відправляються i n,..., n 10 15 20 25 до блока картографічної прив'язки. Цей блок формує координати об'єкту згідно з картографічними даними, що відповідають оптимальній гіпотезі. Блок комплексування інформації здійснює оптимальну обробку даних від двох систем: КНС та КЕНС, згідно заданого алгоритму сумісної обробки даних. У випадку, якщо умова min min A i не виконується, блоком прийняття рішень i n,..., n приймається рішення про недостовірність картографічних даних. Сигнал посилається до блока оперативного картографування, який зберігає дані про поточну реалізацію поля та інформацію від КНС. Проводиться геоприв'язка поточних даних поля до карти та уточнення карти за сигнал від блока оперативного картографування до картографічного блока. Джерела інформації: 1. Патент США № US4122521-Correlation system for multiple-sensor reconnaissance vehicleб 1978. 2. Патент США № US4494200-Process and apparatus for fixing the position of a moving vehicle on a map, - 1985. 3. Корреляционно-экстремальные методы навигации и наведения/ В.К. Баклицкий. - Тверь.: ТО "Книжный клуб", 2009. - 360 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Кореляційно-екстремальна навігаційна система з функцією оперативного картографування, яка містить датчик геофізичного поля, картографічний блок, корелятор, автоматичний оптимізатор, блок картографічної прив'язки, комплексовану навігаційну систему та блок комплексування інформації, яка відрізняється тим, що має блок прийняття рішення, який визначає достовірність виміряних параметрів геофізичного поля відносно поточної картографічної інформації, та блок оперативного картографування, який виділяє аномальну складову геофізичного поля та здійснює уточнення карти. 2 UA 98729 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKharchenko Volodymyr Petrovych
Автори російськоюХарченко Владимир Петрович
МПК / Мітки
МПК: G01C 21/00
Мітки: оперативного, навігаційна, кореляційно-екстремальна, функцією, система, картографування
Код посилання
<a href="https://ua.patents.su/5-98729-korelyacijjno-ekstremalna-navigacijjna-sistema-z-funkciehyu-operativnogo-kartografuvannya.html" target="_blank" rel="follow" title="База патентів України">Кореляційно-екстремальна навігаційна система з функцією оперативного картографування</a>
Спосіб оперативного картографування аномальних геофізичних полів
Номер патенту: 98225
Опубліковано: 27.04.2015
Автори: Мухіна Марина Петрівна, Харченко Володимир Петрович
МПК: G01C 11/00
Мітки: оперативного, картографування, аномальних, полів, геофізичних, спосіб
Формула / Реферат:
Спосіб оперативного картографування аномальних геофізичних полів, який включає отримання даних від бортових вимірювачів геофізичних полів, їх обробку та геоприв'язку, який відрізняється тим, що обчислюють детерміновану вирішуючу функцію для вибраної оптимальної гіпотези і у випадку недостовірності гіпотези виділяють аномальну складову геофізичного поля та уточнюють відомі картографічні дані.
Малогабаритна інерціально-супутникова інтегрована навігаційна система
Номер патенту: 79932
Опубліковано: 13.05.2013
Автори: Кондратюк Марина Василівна, Харченко Володимир Петрович, Кондратюк Василь Михайлович, Вальденмайєр Георгій Георгійович, Вишнякова Євгенія Вікторівна, Ільницька Світлана Іванівна, Савченко Олексій Володимирович, Куценко Олександр Вікторович, Васильєв Ігор Васильович, Тунік Анатолій Азарійович, Трикоз Валерій Павлович
МПК: G01C 23/00
Мітки: система, інерціально-супутникова, інтегрована, малогабаритна, навігаційна
Формула / Реферат:
Малогабаритна інерціально-супутникова інтегрована навігаційна система, що містить багатоканальний радіоприймач, вхід якого через підсилювач з'єднаний з антеною, а виходи підключені до обчислювача місцеположення навігаційних супутників, блок початкової установки альманаху даних про супутники, що підключений виходами до входу обчислювача місцеположення супутників, таймер, підключений виходом до синхронізуючого входу обчислювача місцеположення...
Навігаційна система з охоронними функціями для мобільного об’єкта
Номер патенту: 41818
Опубліковано: 17.09.2001
Автори: Барладін Олександр Володимирович, Барладін Петро Олександрович
МПК: G09B 29/10
Мітки: навігаційна, мобільного, охоронними, система, функціями, об'єкта
Формула / Реферат:
1. Навігаційна система з охоронними функціями для мобільного об'єкта, що містить з'єднані між собою модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль прийому-передачі радіосигналу, яка відрізняється тим, що обладнана додатково автономним джерелом живлення і модулем стану, з'єднаним із модулем визначення координат, модуль управління обладнаний контролером для мобільного телефону, при цьому блок управління,...
Інтегрована навігаційна система
Номер патенту: 15785
Опубліковано: 17.07.2006
Автор: Борисевич Павло Андрійович
МПК: G01C 21/10
Мітки: інтегрована, навігаційна, система
Формула / Реферат:
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидкості судна та блок обробки сигналів, яка відрізняється тим, що у склад системи уведені ехолот, датчик кроку гвинта регульованого кроку, тахогенератор головного двигуна, тахогенератор підрулювального пристрою, датчик кута пера руля, приєднані до відповідних узгоджувальних схем.2. Система за п. 1, яка відрізняється тим, що містить дві...
Навігаційна система для блокованого інтрамедулярного фіксатора
Номер патенту: 57912
Опубліковано: 10.03.2011
Автори: Васюк Володимир Леонідович, Білик Сергій Вікторович, Дудко Олексій Геннадійович, Васюк Сергій Володимирович, Брагарь Олександр Анатолійович
МПК: A61B 17/72
Мітки: фіксатора, навігаційна, система, інтрамедулярного, блокованого
Формула / Реферат:
1. Навігаційна система для блокованого інтрамедулярного фіксатора, що містить отвори для кріплення блокованого інтрамедулярного фіксатора та провідникових втулок, яка відрізняється тим, що вказані отвори для провідникових втулок виконані перпендикулярно до її центральної осі, при цьому їх довжина більша за діаметр d провідникових втулок.2. Навігаційна система за п....
Попередній патент: Авіаційний космічний комплекс
Наступний патент: Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації
Випадковий патент: Спосіб гіперімунізації тварин для виготовлення аглютинуючої сироватки