Малогабаритна інерціально-супутникова інтегрована навігаційна система
Номер патенту: 79932
Опубліковано: 13.05.2013
Автори: Кондратюк Марина Василівна, Куценко Олександр Вікторович, Кондратюк Василь Михайлович, Васильєв Ігор Васильович, Трикоз Валерій Павлович, Вальденмайєр Георгій Георгійович, Савченко Олексій Володимирович, Тунік Анатолій Азарійович, Харченко Володимир Петрович, Вишнякова Євгенія Вікторівна, Ільницька Світлана Іванівна
Формула / Реферат
Малогабаритна інерціально-супутникова інтегрована навігаційна система, що містить багатоканальний радіоприймач, вхід якого через підсилювач з'єднаний з антеною, а виходи підключені до обчислювача місцеположення навігаційних супутників, блок початкової установки альманаху даних про супутники, що підключений виходами до входу обчислювача місцеположення супутників, таймер, підключений виходом до синхронізуючого входу обчислювача місцеположення супутників, виходи якого підключені до входів блока визначення радіовидимих супутників, виходи якого в свою чергу підключені до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані із входами блока обчислення місцеположення користувача, вимірювач проекцій абсолютної кутової швидкості та вимірювач проекцій вектора повного прискорення, що підключені відповідно через коректор кутової швидкості і коректор повного прискорення до першого та другого входів обчислювача навігаційних параметрів, а також блок комплексування інформації та обчислювач початкових даних, перший вхід якого з'єднаний з відповідним входом блока корекції кутової швидкості та виходом вимірювача проекцій абсолютної кутової швидкості, а другий вхід обчислювача початкових даних з'єднаний відповідно з виходом вимірювача проекцій повного прискорення та із входом блока корекції повного прискорення, при цьому третій вхід з'єднаний з другим входом коректора кутової швидкості і підключений до третього виходу блока комплексування інформації, а четвертий вхід з'єднаний із п'ятим входом блока комплексування інформації та підключений до першого виходу блока обчислення місцеположення користувача, другий вихід якого пов'язаний з шостим входом блока комплексування інформації безпосередньо, при цьому другий вихід обчислювача початкових даних пов'язаний а третім входом обчислювача навігаційних параметрів і четвертим входом блока комплексування інформації, а перший вихід блока обчислювача початкових даних безпосередньо пов'язаний з третім входом блока комплексування інформації, перший та другий входи якого з'єднані з однойменними входами обчислювача навігаційних параметрів, вихід якого з'єднаний з однойменним виходом системи безпосередньо, і підключені відповідно до виходів коректора кутової швидкості і коректора повного прискорення, а сьомий вхід пов'язаний з виходом таймера, при цьому перший вихід блока комплексування інформації з'єднаний з другим входом блока вибору робочого сузір'я супутників, четвертий вихід підключений відповідно до другого входу коректора повного прискорення, другий вихід з'єднаний з однойменним виходом системи, а восьмий вхід блока комплексування інформації з'єднаний з виходом блока обробки супутникових даних, перший вхід якого з'єднаний з багатоканальним радіоприймачем і пов'язаний з блоком початкової установки альманаху даних про супутники другим входом, з'єднаний з таймером через третій вхід, при цьому четвертим входом підключений до першого виходу блока комплексування інформації, а вихід якого безпосередньо пов'язаний з восьмим входом блока комплексування інформації, яка відрізняється тим що, в ній замінено дорогі лазерні гіроскопи та акселерометри на відповідні більш ″грубі″ та дешеві інерціальні датчики, що базуються на MEMS-технологіях, і виходи яких пов'язані із першим та другим входами обчислювача початкових даних та однойменними входами блоків корекції кутової швидкості та повного прискорення відповідно, а також додатково введено блок магнітометра, вихід якого пов'язаний безпосередньо з п'ятим входом обчислювача початкових даних та десятим входом блока комплексування інформації, і додатково введено блок вимірювання висоти польоту, що містить барометричний та ультразвуковий висотоміри, і вихід якого пов'язаний безпосередньо з дев'ятим входом блока комплексування інформації.
Текст
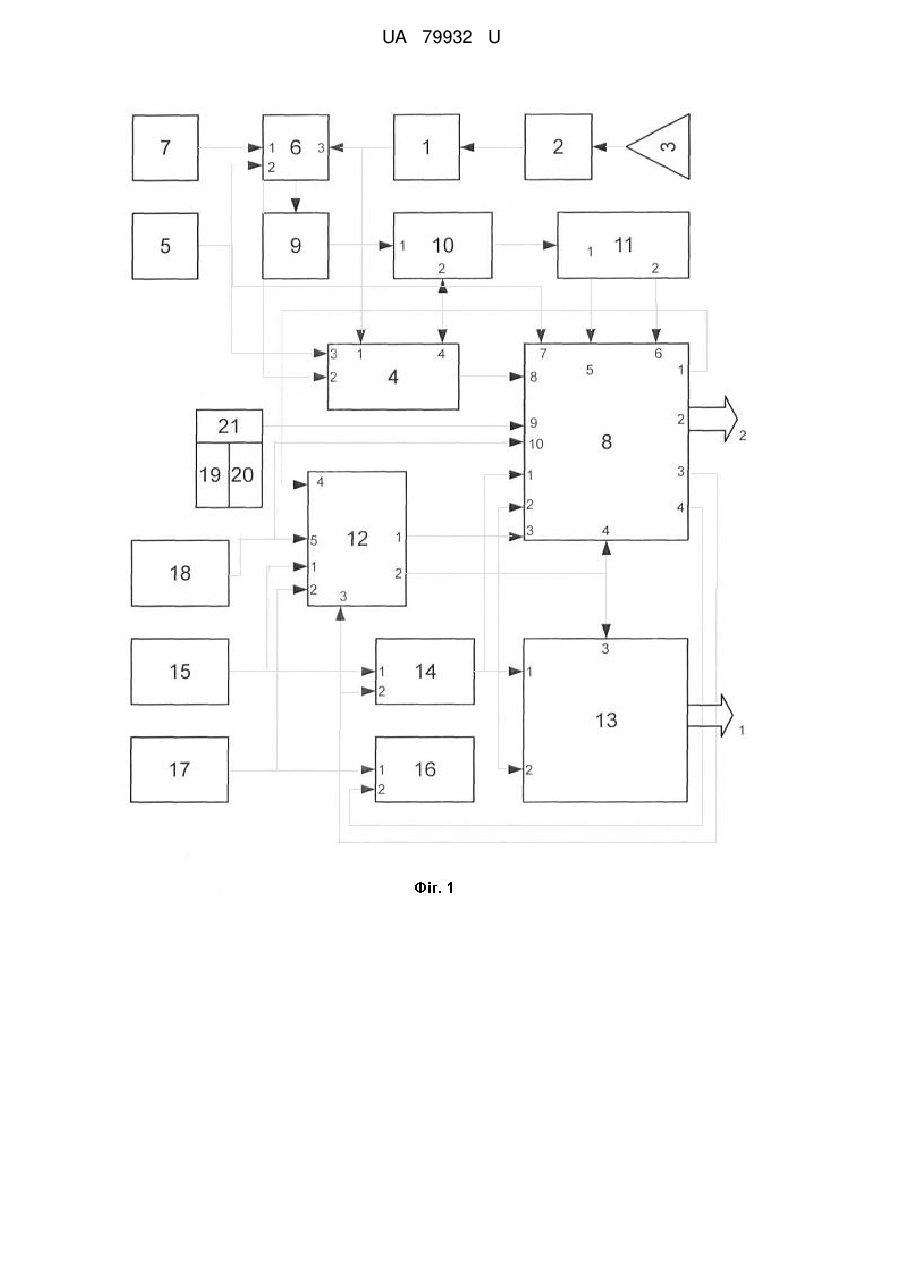
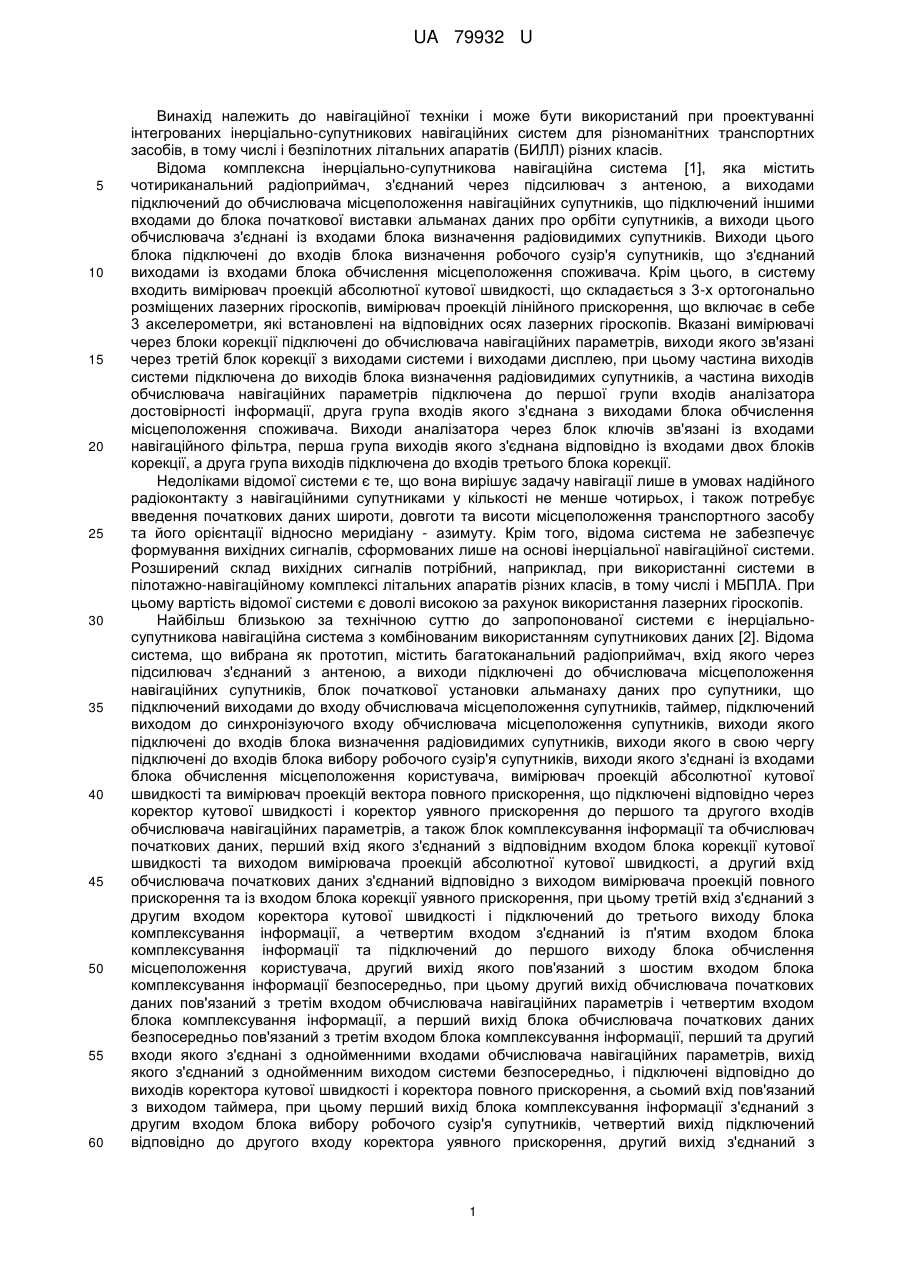
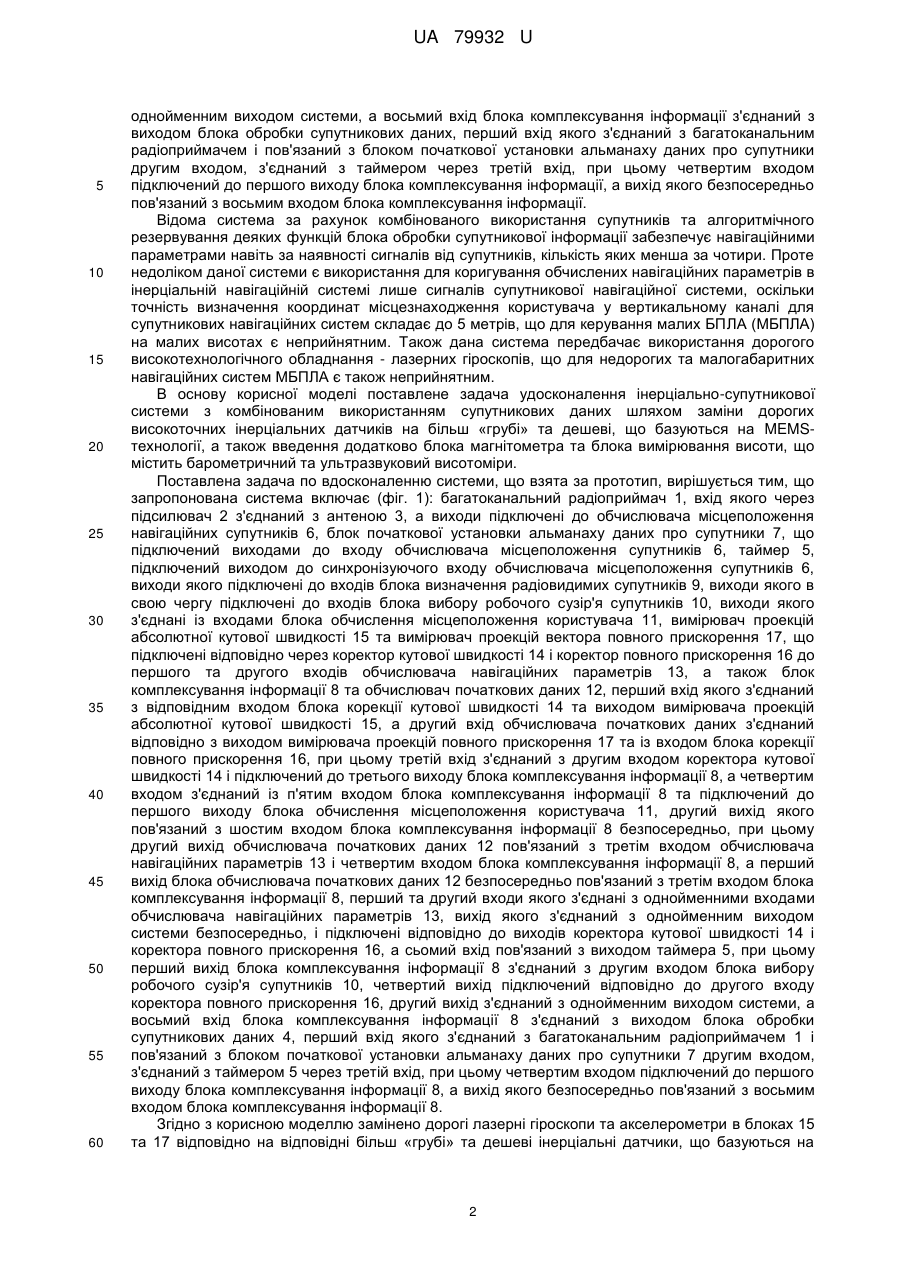
Реферат: Малогабаритна інерціально-супутникова інтегрована навігаційна система з комбінованим використанням супутникових даних шляхом зміни дорогих високоточних інерціальних датчиків на більш дешеві, що базуються на МЕМS технологій, а також введеня додаткових блоків. UA 79932 U (12) UA 79932 U UA 79932 U 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до навігаційної техніки і може бути використаний при проектуванні інтегрованих інерціально-супутникових навігаційних систем для різноманітних транспортних засобів, в тому числі і безпілотних літальних апаратів (БИЛЛ) різних класів. Відома комплексна інерціально-супутникова навігаційна система [1], яка містить чотириканальний радіоприймач, з'єднаний через підсилювач з антеною, а виходами підключений до обчислювача місцеположення навігаційних супутників, що підключений іншими входами до блока початкової виставки альманах даних про орбіти супутників, а виходи цього обчислювача з'єднані із входами блока визначення радіовидимих супутників. Виходи цього блока підключені до входів блока визначення робочого сузір'я супутників, що з'єднаний виходами із входами блока обчислення місцеположення споживача. Крім цього, в систему входить вимірювач проекцій абсолютної кутової швидкості, що складається з 3-х ортогонально розміщених лазерних гіроскопів, вимірювач проекцій лінійного прискорення, що включає в себе 3 акселерометри, які встановлені на відповідних осях лазерних гіроскопів. Вказані вимірювачі через блоки корекції підключені до обчислювача навігаційних параметрів, виходи якого зв'язані через третій блок корекції з виходами системи і виходами дисплею, при цьому частина виходів системи підключена до виходів блока визначення радіовидимих супутників, а частина виходів обчислювача навігаційних параметрів підключена до першої групи входів аналізатора достовірності інформації, друга група входів якого з'єднана з виходами блока обчислення місцеположення споживача. Виходи аналізатора через блок ключів зв'язані із входами навігаційного фільтра, перша група виходів якого з'єднана відповідно із входами двох блоків корекції, а друга група виходів підключена до входів третього блока корекції. Недоліками відомої системи є те, що вона вирішує задачу навігації лише в умовах надійного радіоконтакту з навігаційними супутниками у кількості не менше чотирьох, і також потребує введення початкових даних широти, довготи та висоти місцеположення транспортного засобу та його орієнтації відносно меридіану - азимуту. Крім того, відома система не забезпечує формування вихідних сигналів, сформованих лише на основі інерціальної навігаційної системи. Розширений склад вихідних сигналів потрібний, наприклад, при використанні системи в пілотажно-навігаційному комплексі літальних апаратів різних класів, в тому числі і МБПЛА. При цьому вартість відомої системи є доволі високою за рахунок використання лазерних гіроскопів. Найбільш близькою за технічною суттю до запропонованої системи є інерціальносупутникова навігаційна система з комбінованим використанням супутникових даних [2]. Відома система, що вибрана як прототип, містить багатоканальний радіоприймач, вхід якого через підсилювач з'єднаний з антеною, а виходи підключені до обчислювача місцеположення навігаційних супутників, блок початкової установки альманаху даних про супутники, що підключений виходами до входу обчислювача місцеположення супутників, таймер, підключений виходом до синхронізуючого входу обчислювача місцеположення супутників, виходи якого підключені до входів блока визначення радіовидимих супутників, виходи якого в свою чергу підключені до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані із входами блока обчислення місцеположення користувача, вимірювач проекцій абсолютної кутової швидкості та вимірювач проекцій вектора повного прискорення, що підключені відповідно через коректор кутової швидкості і коректор уявного прискорення до першого та другого входів обчислювача навігаційних параметрів, а також блок комплексування інформації та обчислювач початкових даних, перший вхід якого з'єднаний з відповідним входом блока корекції кутової швидкості та виходом вимірювача проекцій абсолютної кутової швидкості, а другий вхід обчислювача початкових даних з'єднаний відповідно з виходом вимірювача проекцій повного прискорення та із входом блока корекції уявного прискорення, при цьому третій вхід з'єднаний з другим входом коректора кутової швидкості і підключений до третього виходу блока комплексування інформації, а четвертим входом з'єднаний із п'ятим входом блока комплексування інформації та підключений до першого виходу блока обчислення місцеположення користувача, другий вихід якого пов'язаний з шостим входом блока комплексування інформації безпосередньо, при цьому другий вихід обчислювача початкових даних пов'язаний з третім входом обчислювача навігаційних параметрів і четвертим входом блока комплексування інформації, а перший вихід блока обчислювача початкових даних безпосередньо пов'язаний з третім входом блока комплексування інформації, перший та другий входи якого з'єднані з однойменними входами обчислювача навігаційних параметрів, вихід якого з'єднаний з однойменним виходом системи безпосередньо, і підключені відповідно до виходів коректора кутової швидкості і коректора повного прискорення, а сьомий вхід пов'язаний з виходом таймера, при цьому перший вихід блока комплексування інформації з'єднаний з другим входом блока вибору робочого сузір'я супутників, четвертий вихід підключений відповідно до другого входу коректора уявного прискорення, другий вихід з'єднаний з 1 UA 79932 U 5 10 15 20 25 30 35 40 45 50 55 60 однойменним виходом системи, а восьмий вхід блока комплексування інформації з'єднаний з виходом блока обробки супутникових даних, перший вхід якого з'єднаний з багатоканальним радіоприймачем і пов'язаний з блоком початкової установки альманаху даних про супутники другим входом, з'єднаний з таймером через третій вхід, при цьому четвертим входом підключений до першого виходу блока комплексування інформації, а вихід якого безпосередньо пов'язаний з восьмим входом блока комплексування інформації. Відома система за рахунок комбінованого використання супутників та алгоритмічного резервування деяких функцій блока обробки супутникової інформації забезпечує навігаційними параметрами навіть за наявності сигналів від супутників, кількість яких менша за чотири. Проте недоліком даної системи є використання для коригування обчислених навігаційних параметрів в інерціальній навігаційній системі лише сигналів супутникової навігаційної системи, оскільки точність визначення координат місцезнаходження користувача у вертикальному каналі для супутникових навігаційних систем складає до 5 метрів, що для керування малих БПЛА (МБПЛА) на малих висотах є неприйнятним. Також дана система передбачає використання дорогого високотехнологічного обладнання - лазерних гіроскопів, що для недорогих та малогабаритних навігаційних систем МБПЛА є також неприйнятним. В основу корисної моделі поставлене задача удосконалення інерціально-супутникової системи з комбінованим використанням супутникових даних шляхом заміни дорогих високоточних інерціальних датчиків на більш «грубі» та дешеві, що базуються на MEMSтехнології, а також введення додатково блока магнітометра та блока вимірювання висоти, що містить барометричний та ультразвуковий висотоміри. Поставлена задача по вдосконаленню системи, що взята за прототип, вирішується тим, що запропонована система включає (фіг. 1): багатоканальний радіоприймач 1, вхід якого через підсилювач 2 з'єднаний з антеною 3, а виходи підключені до обчислювача місцеположення навігаційних супутників 6, блок початкової установки альманаху даних про супутники 7, що підключений виходами до входу обчислювача місцеположення супутників 6, таймер 5, підключений виходом до синхронізуючого входу обчислювача місцеположення супутників 6, виходи якого підключені до входів блока визначення радіовидимих супутників 9, виходи якого в свою чергу підключені до входів блока вибору робочого сузір'я супутників 10, виходи якого з'єднані із входами блока обчислення місцеположення користувача 11, вимірювач проекцій абсолютної кутової швидкості 15 та вимірювач проекцій вектора повного прискорення 17, що підключені відповідно через коректор кутової швидкості 14 і коректор повного прискорення 16 до першого та другого входів обчислювача навігаційних параметрів 13, а також блок комплексування інформації 8 та обчислювач початкових даних 12, перший вхід якого з'єднаний з відповідним входом блока корекції кутової швидкості 14 та виходом вимірювача проекцій абсолютної кутової швидкості 15, а другий вхід обчислювача початкових даних з'єднаний відповідно з виходом вимірювача проекцій повного прискорення 17 та із входом блока корекції повного прискорення 16, при цьому третій вхід з'єднаний з другим входом коректора кутової швидкості 14 і підключений до третього виходу блока комплексування інформації 8, а четвертим входом з'єднаний із п'ятим входом блока комплексування інформації 8 та підключений до першого виходу блока обчислення місцеположення користувача 11, другий вихід якого пов'язаний з шостим входом блока комплексування інформації 8 безпосередньо, при цьому другий вихід обчислювача початкових даних 12 пов'язаний з третім входом обчислювача навігаційних параметрів 13 і четвертим входом блока комплексування інформації 8, а перший вихід блока обчислювача початкових даних 12 безпосередньо пов'язаний з третім входом блока комплексування інформації 8, перший та другий входи якого з'єднані з однойменними входами обчислювача навігаційних параметрів 13, вихід якого з'єднаний з однойменним виходом системи безпосередньо, і підключені відповідно до виходів коректора кутової швидкості 14 і коректора повного прискорення 16, а сьомий вхід пов'язаний з виходом таймера 5, при цьому перший вихід блока комплексування інформації 8 з'єднаний з другим входом блока вибору робочого сузір'я супутників 10, четвертий вихід підключений відповідно до другого входу коректора повного прискорення 16, другий вихід з'єднаний з однойменним виходом системи, а восьмий вхід блока комплексування інформації 8 з'єднаний з виходом блока обробки супутникових даних 4, перший вхід якого з'єднаний з багатоканальним радіоприймачем 1 і пов'язаний з блоком початкової установки альманаху даних про супутники 7 другим входом, з'єднаний з таймером 5 через третій вхід, при цьому четвертим входом підключений до першого виходу блока комплексування інформації 8, а вихід якого безпосередньо пов'язаний з восьмим входом блока комплексування інформації 8. Згідно з корисною моделлю замінено дорогі лазерні гіроскопи та акселерометри в блоках 15 та 17 відповідно на відповідні більш «грубі» та дешеві інерціальні датчики, що базуються на 2 UA 79932 U 5 10 15 20 25 30 35 40 45 50 MEMS-технологіях, і виходи яких пов'язані із першим та другим входами обчислювача початкових даних 12 та однойменними входами блоків корекції кутової швидкості 14 та повного прискорення 16 відповідно, також введено додатково блок магнітометра 18, вихід якого пов'язаний безпосередньо з п'ятим входом обчислювача початкових даних 12 та десятим входом блока комплексування інформації 8, також введено додатково блок вимірювання висоти польоту 21, що містить барометричний 19 та ультразвуковий 20 висотоміри, і вихід якого пов'язаний безпосередньо з дев'ятим входом блока комплексування інформації 8. На фіг. 1 приведена блок-схема запропонованої системи; на фіг. 2 - блок-схема алгоритму, реалізованого в блоці комплексування інформації, на фіг. 3 - блок-схема логіки роботи блока формування матриці вимірювань Н. Інші блоки запропонованої системи реалізують алгоритми прототипу. У відповідності з фіг. 1 система містить багатоканальний радіоприймач 1, зв'язаний через підсилювач 2 з антеною 3, а виходами підключений до першого входу блока обробки супутникових даних 4, синхронізуючий третій вхід якого підключений до таймера 5, і до третього входу обчислювача місцеположення супутників 6, перший вхід якого з'єднаний з виходом блока початкової установки альманаху даних про супутники 7, зв'язаний безпосередньо також з другим входом блока оброки супутникових даних 4, четвертий вхід якого з'єднаний з першим виходом блока комплексування інформації 8, при цьому синхронізуючий другий вхід обчислювача 6 підключений до виходу таймера 5, а його вихід з'єднаний з входом блока визначення радіовидимих супутників 9, вихід якого підключений до першого входу блока вибору робочого сузір'я супутників 10. Перший вихід блока 8 з'єднаний з другим входом блока вибору робочого сузір'я супутників 10 та четвертим входом блока обробки супутникових даних 4. Вихід блока 10 з'єднаний з входом блока обчислення місцеположення користувача 11, підключеного першим виходом до четвертого входу обчислювача початкових даних 12 і до п'ятого входу блока комплексування інформації 8, а другим виходом підключений до шостого входу блока 8. Перший та другий входи блока комплексування інформації 8 з'єднані з однойменними входами обчислювача навігаційних параметрів 13, вихід якого зв'язаний з першим виходом системи, а перший вхід якого підключений до виходу коректора кутової швидкості 14, перший вхід якого з'єднаний з виходом вимірювача проекцій абсолютної кутової швидкості 15 і першим входом обчислювача початкових даних 12. Другий вхід коректора 14 з'єднаний відповідно з третім входом обчислювача початкових даних 12 і підключений відповідно до третього виходу блока комплексування інформації 8. Другий вхід блока комплексування інформації 8 з'єднаний з однойменним входом обчислювача навігаційних параметрів 13 і підключений відповідно до виходу коректора лінійного прискорення 16, перший вхід якого з'єднаний з другим входом обчислювача початкових даних 12 і підключений до виходу вимірювача проекції вектора повного прискорення 17, а другий вхід коректора 16 підключений відповідно до четвертого виходу блока комплексування інформації 8. Восьмий вхід блока 8 з'єднаний з виходом блока обробки супутникових даних 4. Перший вихід обчислювача початкових даних 12 з'єднаний з третім входом блока комплексування інформації 8, а другий вихід підключений до третього входу обчислювача навігаційних параметрів 13 і до четвертого входу блока 8, сьомий вхід якого зв'язаний з виходом таймера 5, при цьому другий вихід безпосередньо з'єднаний з другим виходом системи. Вихід вимірювача висоти польоту 21, який складається з барометричного висотоміру 19 та ультразвукового дальноміра 20, з'єднаний з дев'ятим входом блока комплексування інформації 8, десятий вхід якого підключений до виходу магнітометричного блока 18 та п'ятого входу обчислювача 12 початкових даних. Запропонована малогабаритна інерціально-супутникова інтегрована навігаційна система (МІСІНС) працює наступним чином. Відповідно до прототипу вихідною інформацією для формування вихідних параметрів МІСІНС є сигнали з трьох пов'язаних з корпусом БПЛА і встановлених ортогонально один відносно одного гіроскопічних датчиків, що входять до складу вимірювача проекцій абсолютної кутової швидкості 15, і сигнали з трьох аналогічно розташованих акселерометрів, що входять до складу вимірювача проекцій вектора повного прискорення 17, а також сигнали з трьох аналогічно розташованих магнітометрів, що входять до складу магнітометричного блока 18. Сигнали з гіроскопічних датчиків, пропорційні проекціям вектора абсолютної кутової швидкості x , y , z і сигнали з акселерометрів, пропорційні 55 a a a проекціям вектора повного прискорення x , y , z , надходять до обчислювача початкових даних 12 і через коректор кутової швидкості 14 і коректор повного прискорення 16 в блок комплексування інформації 8, а також в обчислювач навігаційних параметрів 13. В свою чергу 3 UA 79932 U сигнали з магнітометрів, пропорційні проекціям вектора напруженості магнітного поля Землі m x , my , mz , надходять в обчислювач початкових даних 12 і блок комплексування інформації 8. В обчислювач початкових даних 12 надходять також сигнали, пропорційні широті uav висоті і довготі uav МБПЛА з блока обчислення місцеположення користувача приймача супутникової інформації 11, а також сигнали помилок вимірювань проекцій кутової швидкості huav 5 x y , , z , з блока комплексування інформації 8 для їх запам'ятовування в енергонезалежній нам'яті блока. У блоці 12 здійснюється підготовка початкових даних для блока 8 та обчислювача навігаційних параметрів 13, у результаті чого формуються сигнали 0 , h0 10 15 20 25 30 , 0 , що пропорційні значенням широти, висоти і довготи місцеположення М БПЛА, і сигнали 0 , 0 , 0 , відповідно пропорційні початковим значенням кутів курсу, тангажа і крену МБПЛА. У блоках 14 та 16 відповідно здійснюється облік помилок вимірювань кутової швидкості обертання і помилок вимірювань повного прискорення. В обчислювачі навігаційних параметрів 13 за сигналами, що надходять з коректорів кутової швидкості 14 і повного прискорення 16, з урахуванням початкових даних, що надійшли з обчислювача початкових даних 12, здійснюється оперативне обчислення навігаційних параметрів: кутів орієнтації МБПЛА щодо географічного меридіана і площини місцевого горизонту , ; північної N , вертикальної h та східної E складових відносної швидкості поступального руху МБПЛА, а також його географічних координат , h , . Зазначені параметри у вигляді відповідних сигналів видаються у зовнішні системи. Прийняті антеною 3 сигнали від навігаційних супутників через підсилювач 2 надходять до багатоканального радіоприймача 1, який після їх обробки видає інформацію про супутники в обчислювач місцеположення супутників 6. Обчислювач 6 за даними про орбіти супутників, що видаються блоком інформації 7 з радіоприймача 1, і за сигналом таймера 5 обчислює розташування супутників, із сукупності яких потім буде вибрана група, що забезпечить найкращу точність навігаційного рішення. Такий вибір здійснюється в блоці вибору робочого сузір'я супутників 10, на входи якого, крім супутникової інформації з блока 9, надходять з блока 8 сигнали , h , , що пропорційні географічним координатам МБПЛА, отриманих на основі інерціальних даних і відповідних їхній апріорній оцінці в розширеному фільтрі Калмана [3] на момент приходу супутникових сигналів. З урахуванням цих сигналів в блоці 10 здійснюється раціональний вибір робочого сузір'я супутників при кількості радіовидимих супутників, більше чотирьох, що підвищує достовірність і точність наступних навігаційних рішень. Далі інформація про супутники, що включені до робочого сузір'я, надходить до блока обчислення місцеположення користувача 11, в якому формуються сигнали, пропорційні координатам БПЛА uav , huav , uav та його швидкості N , h , 35 E . Всі зазначені сигнали надходять в блок 8 для корекції навігаційних параметрів. Крім того, h сигнали uav , uav , uav надходять в обчислювач початкових даних 12 для початкової виставки БПЛА при ввімкненні системи. При кількості радіовидимих супутників менше чотирьох сигнали uav , huav , uav та N , h , E 40 45 50 в блоці 11 не формуються. В цьому випадку для корекції вектора стану в блоці 8 в МІСІНС використовуються вихідні сигнали блока обробки супутникових даних 4, які включають в себе координати X, У, Z і проекції швидкості VX , VY , VZ радіовидимих супутників відповідно до [2]. На вхід блока 4 з багатоканального радіоприймача 1, таймера 5 та блока 7 надходять відповідні дані, а з блока комплексування інформації 8 - сигнали про поточні значення широти висоти h і довготи МБПЛА. На основі прийнятих сигналів в блоці 4 реалізується алгоритм обчислення координат і швидкості радіовидимих супутників, а також алгоритм обчислення псевдодальності і радіальної швидкості БПЛА відносно навігаційних супутників, що беруть участь у вимірюваннях, відповідно до [2, 4]. Комплексування інерціальної і супутникової інформації здійснюється в блоці комплексування інформації 8, на вхід якого надходять сигнал скоригованої кутової швидкості обертання з коректора кутової швидкості 14, скоригованого повного прискорення з коректора повного прискорення 16, а також сигнал з блока обчислення місцеположення споживача 11 про 4 UA 79932 U координати та швидкості МБПЛА або з блока 4 про координати і швидкості супутників, псевдодальності і радіальної швидкості, сигнал секундної мітки від таймера 5 для синхронізації інерціальної і супутникової інформації, а також сигнал з магнітометричного блока 18 про m 5 проекції вектора напруженості магнітного поля Землі m x , y , mz , та сигнал з обчислювача висоти польоту 21 про поточну висоту H. Після ввімкнення системи в блок комплексування інформації 8 одноразово надходять також сигнали з обчислювача початкових даних 12 про місцезнаходження МБПЛА 0 , h0 , 0 , та його орієнтацію 0 , 0 , 0 , і помилки гіроскопічних 10 15 20 y 0 z0 датчиків x0 , , . Використовуючи обчислені початкові дані про місцеположення та орієнтацію МБПЛА та виміряні проекції кутової швидкості обертання та повного прискорення , що надходять з блоків 14 та 16 відповідно, на основі алгоритму автономної навігації відбувається обчислення поточних координат місцеположення, швидкості руху та орієнтації МБПЛА, а також обчислення апріорної оцінки вектора стану відповідно до [1, 5]. Далі на основі алгоритму розширеного фільтра Калмана, блок-схема якого наведена на фіг. 2, відбувається корекція обчислених поточних координат місцеположення, швидкості руху та орієнтації МБПЛА, використовуючи отримані координати МБПЛА uav , huav , uav та його швидкості N , h , E з блока обчислення місцеположення користувача 11, виміряну висоту польоту Н з вимірювача висоти польоту 21, інформацією про яку є сигнал з барометричного висотоміру 19 або ультразвукового висотоміру 20 в залежності від висотного режиму польоту: на висоті польоту до 10 м використовується сигнал з ультразвукового висотоміру 20, а на висоті польоту більше 10 м - сигнал з барометричного висотоміру, та нормовані проекції вектора напруженості магнітного поля Землі m mx 25 30 , y , mz , виміряні магнітометричним блоком 18. На основі перевірки готовності даних від глобальної навігаційної супутникової системи, магнітометрів та висотоміру, що надходять з блока обчислення місцеположення користувача 11, магнітометричного блока 18 та обчислювача висоти польоту 21 відповідно, блок формування матриці вимірювань Н здійснює оптимальний підбір даних, що будуть формувати остаточне навігаційне рішення. Логіка роботи блока формування матриці вимірювань H представлена на фіг. 3. За умови готовності даних відГНСС, магнітометра та висотоміра матриці вимірювань Н приймає значення Н1, яке відповідає повному набору даних від всіх вимірювачів, матриця Н2 відповідає використанню даних з ГНСС та висотоміра, матриця Н3 - даним лише з ГНСС, Н4 - з ГНСС та магнітометра, H5 - з магнітометра та висотоміра, H6 - лише з магнітометра, Н7 - лише з висотоміра. Після формування одного із семи варіантів матриці вимірювань Н система іде на вихід 1, в разі ж відсутності даних від ГНСС, магнітометра і висотоміра система іде на вихід 2. На фіг. 2 вихід 1 блока формування матриці вимірювань H позначає напрям на обчислення 1 35 T T коефіцієнтів підсилення фільтра Калмана K Pn H H Pn H R 40 до алгоритму автономної навігації апріорної оцінки вектора стану з врахуванням інерціальних даних. Вихідні сигнали блока 8, що формуються відповідно до алгоритму розширеного фільтра Калмана, представленого на фіг. 2, включають в себе скориговані значення місцеположення та обрахунок апостеріорної коваріаційної матриці похибок Pn E K H Pn , а вихід 2 - напрям на обчислення відповідно БПЛА uav , huav , uav , його швидкості N , h , E , та орієнтації , , , що видаються в зовнішні системи, а також сигнали, пропорційні помилкам вимірювань гіроскопічних датчиків x y , z , що надходять в коректор 14 для корекції поточних вимірювань кутової швидкості і в обчислювач 12 для збереження в енергонезалежній пам'яті, і помилок вимірювань 45 50 55 , a a a y z , що надходять в коректор 16 для корекції поточних вимірювань x, акселерометрів , повного прискорення. Крім того, на виході блока комплексування інформації 8 формуються спрогнозовані за інерціальними даними сигнали , h , , які надходять в блок 10 для оптимізації вибору робочого сузір'я супутників і в блок 4 для обчислення іоносферної і тропосферних поправок. Використані джерела 1. Патент РФ № 2087867, М. кл. G01C23/00, G01S5/14, 20.08.1997; 2. Патент РФ № 2334199, М. кл. G01C23/00, G01S5/14, 20.09.2008; 3. Grewal М. S., Weill L. R., Andrews A. Р. Global Positioning Systems, Inertial Navigation, and Integration. - 2nd ed. - A John Wiley & Sons, Inc., Publication, 2007. - 525 p. 4. Соловьев Ю. А. Системы спутниковой навигации. - М.: Зко-Тренд. 2000. - 267 с; 5 UA 79932 U 5. Titterton, D. H. & Weston, J. L. Strapdown Inertial Navigation Technology, Peter Peregrinus Press, London, 2004. - 549 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 40 45 Малогабаритна інерціально-супутникова інтегрована навігаційна система, що містить багатоканальний радіоприймач, вхід якого через підсилювач з'єднаний з антеною, а виходи підключені до обчислювача місцеположення навігаційних супутників, блок початкової установки альманаху даних про супутники, що підключений виходами до входу обчислювача місцеположення супутників, таймер, підключений виходом до синхронізуючого входу обчислювача місцеположення супутників, виходи якого підключені до входів блока визначення радіовидимих супутників, виходи якого в свою чергу підключені до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані із входами блока обчислення місцеположення користувача, вимірювач проекцій абсолютної кутової швидкості та вимірювач проекцій вектора повного прискорення, що підключені відповідно через коректор кутової швидкості і коректор повного прискорення до першого та другого входів обчислювача навігаційних параметрів, а також блок комплексування інформації та обчислювач початкових даних, перший вхід якого з'єднаний з відповідним входом блока корекції кутової швидкості та виходом вимірювача проекцій абсолютної кутової швидкості, а другий вхід обчислювача початкових даних з'єднаний відповідно з виходом вимірювача проекцій повного прискорення та із входом блока корекції повного прискорення, при цьому третій вхід з'єднаний з другим входом коректора кутової швидкості і підключений до третього виходу блока комплексування інформації, а четвертий вхід з'єднаний із п'ятим входом блока комплексування інформації та підключений до першого виходу блока обчислення місцеположення користувача, другий вихід якого пов'язаний з шостим входом блока комплексування інформації безпосередньо, при цьому другий вихід обчислювача початкових даних пов'язаний а третім входом обчислювача навігаційних параметрів і четвертим входом блока комплексування інформації, а перший вихід блока обчислювача початкових даних безпосередньо пов'язаний з третім входом блока комплексування інформації, перший та другий входи якого з'єднані з однойменними входами обчислювача навігаційних параметрів, вихід якого з'єднаний з однойменним виходом системи безпосередньо, і підключені відповідно до виходів коректора кутової швидкості і коректора повного прискорення, а сьомий вхід пов'язаний з виходом таймера, при цьому перший вихід блока комплексування інформації з'єднаний з другим входом блока вибору робочого сузір'я супутників, четвертий вихід підключений відповідно до другого входу коректора повного прискорення, другий вихід з'єднаний з однойменним виходом системи, а восьмий вхід блока комплексування інформації з'єднаний з виходом блока обробки супутникових даних, перший вхід якого з'єднаний з багатоканальним радіоприймачем і пов'язаний з блоком початкової установки альманаху даних про супутники другим входом, з'єднаний з таймером через третій вхід, при цьому четвертим входом підключений до першого виходу блока комплексування інформації, а вихід якого безпосередньо пов'язаний з восьмим входом блока комплексування інформації, яка відрізняється тим, що в ній замінено дорогі лазерні гіроскопи та акселерометри на відповідні більш ″грубі″ та дешеві інерціальні датчики, що базуються на MEMS-технологіях, і виходи яких пов'язані із першим та другим входами обчислювача початкових даних та однойменними входами блоків корекції кутової швидкості та повного прискорення відповідно, а також додатково введено блок магнітометра, вихід якого пов'язаний безпосередньо з п'ятим входом обчислювача початкових даних та десятим входом блока комплексування інформації, і додатково введено блок вимірювання висоти польоту, що містить барометричний та ультразвуковий висотоміри, і вихід якого пов'язаний безпосередньо з дев'ятим входом блока комплексування інформації. 6 UA 79932 U 7 UA 79932 U 8 UA 79932 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюSmall-dimension inertial-satellite integrated navigation system
Автори англійськоюKharchenko Volodymyr Petrovych, Kondratiuk Vasyl Mykhailovych, Tunik Anatolii Azariiovych, Ilnytska Svitlana Ivanivna, Valdenmaier Heorhii Heorhiiovych, Vyshniakova Yevhania Viktorivnal, Trykoz Valerii Pavlovych, Kutsenko Oleksandr Viktorovych, Kondratiuk Maryna Vasylivna, Vasyliev Ihor Vasyliovych, Savchenko Oleksii Volodymyrovych
Назва патенту російськоюМалогабаритная инерциально-спутниковая интегрированная навигационная система
Автори російськоюХарченко Владимир Петрович, Кондратюк Василий Михайлович, Туник Анатолий Азарьевич, Ильницкая Светлана Ивановна, Вальденмайер Георгий Георгиевич, Вишнякова Евгения Викторовна, Трикоз Валерий Павлович, Куценко Александр Викторович, Кондратюк Марина Васильевна, Васильев Игорь Васильевич, Савченко Алексей Владимирович
МПК / Мітки
МПК: G01C 23/00
Мітки: інерціально-супутникова, інтегрована, навігаційна, малогабаритна, система
Код посилання
<a href="https://ua.patents.su/11-79932-malogabaritna-inercialno-suputnikova-integrovana-navigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Малогабаритна інерціально-супутникова інтегрована навігаційна система</a>
Інтегрована навігаційна система
Номер патенту: 15785
Опубліковано: 17.07.2006
Автор: Борисевич Павло Андрійович
МПК: G01C 21/10
Мітки: інтегрована, навігаційна, система
Формула / Реферат:
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидкості судна та блок обробки сигналів, яка відрізняється тим, що у склад системи уведені ехолот, датчик кроку гвинта регульованого кроку, тахогенератор головного двигуна, тахогенератор підрулювального пристрою, датчик кута пера руля, приєднані до відповідних узгоджувальних схем.2. Система за п. 1, яка відрізняється тим, що містить дві...
Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс

Номер патенту: 63186
Опубліковано: 26.09.2011
Автори: Кулік Анатолій Степанович, Степанов Федір Володимирович, Дергачов Костянтин Юрьєвич
МПК: G01C 23/00
Мітки: автоматизований, інерціально-супутниковий, відмовостійкий, комплекс, навігаційний
Формула / Реферат:
Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс, що містить багатоканальний радіоприймач, вхід якого через підсилювач пов'язаний з антеною, а його виходи підключені до першої групи входів обчислювача місця розташування супутників, блок початкової установки альманаху даних про супутники, підключений виходами до другої групи входів обчислювача місця розташування супутників, таймер, підключений виходом до...
Комплексна навігаційна система
Номер патенту: 42148
Опубліковано: 15.10.2001
Автор: Бакулін Ігор Євгенович
МПК: G01C 23/00
Мітки: комплексна, навігаційна, система
Формула / Реферат:
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно - екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний...
Безплатформна інерціальна навігаційна система
Номер патенту: 47328
Опубліковано: 25.01.2010
Автори: Федорчук Ігор Володимирович, Златкін Олег Юрійович, До Куок Туан, Давидов Дмитро Володимирович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович
МПК: G01C 21/00
Мітки: система, безплатформна, інерціальна, навігаційна
Формула / Реферат:
Безплатформна інерціальна навігаційна система, що складається з трьох датчиків кутових швидкостей та трьох акселерометрів, яка відрізняється тим, що в неї додатково введені два датчики кутової швидкості, чутливі осі перших двох датчиків кутових швидкостей співпадають з двома осями ортогональної системи координат, вісь третього датчика кутової швидкості направлена під кутом по відношенню до третьої ортогональної осі, осі четвертого та п'ятого...
Бортова мікроелектронна малогабаритна радіотелеметрична система
Номер патенту: 54299
Опубліковано: 10.11.2010
Автори: Конюхов Станіслав Миколайович, Свириденко Анатолій Олексійович, Колесник Костянтин Іванович, Горбулін Володимир Павлович, Яковлев Віталій Васильович, Курячий Євген Віталійович, Немчин Олександр Федорович
МПК: H04Q 9/00
Мітки: малогабаритна, система, мікроелектронна, радіотелеметрична, бортова
Формула / Реферат:
1. Бортова мікроелектронна малогабаритна радіотелеметрична система, що містить перший, другий та третій ступені комутації, а також передавальний пристрій, блок вмикання, блок живлення датчиків, датчик швидкоплинних процесів, датчик повільноплинних процесів та датчик короткочасних циклічних процесів, при цьому до складу першого ступеня комутації входить блок формування кадру, до складу другого ступеня комутації входять локальний кодовий...
Попередній патент: Спосіб виробництва масломолочних продуктів
Наступний патент: Термоелектрична система з каталітичним джерелом тепла
Випадковий патент: Спосіб перетворення виштовхувальної сили рідини у механічну енергію та пристрій для його здійснення