Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації
Номер патенту: 98730
Опубліковано: 12.05.2015
Автори: Осіпчук Аліна Олександрівна, Фіалкіна Тетяна Станіславівна, Кондрашов Ярослав Вікторович, Кондрашов Віктор Іванович


Формула / Реферат
Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації, що містить підсилювач високої частоти, вхід якого є входом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, з'єднані послідовно детектор, фільтр піднесучої частоти, підсилювач-обмежувач, частотний детектор, перший фільтр нижніх частот і цифровий фазометр, другий фільтр нижніх частот, вихід якого з'єднаний з другим входом цифрового фазометра, який відрізняється тим, що введені комутатор, два регістри пам'яті, суматор і синхронізатор, вихід підсилювача високої частоти з'єднаний з входом детектора, вихід якого з'єднаний з першим входом комутатора, другий вхід і вихід якого з'єднані відповідно з виходом частотного детектора і входом другого фільтра нижніх частот, вихід цифрового фазометра з'єднаний з першими входами обох регістрів пам'яті, виходи яких з'єднані з відповідними входами суматора, вихід якого є виходом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, чотири виходи синхронізатора з'єднані відповідно з третім входом комутатора, другими входами першого і другого регістрів пам'яті та третім входом суматора.
Текст
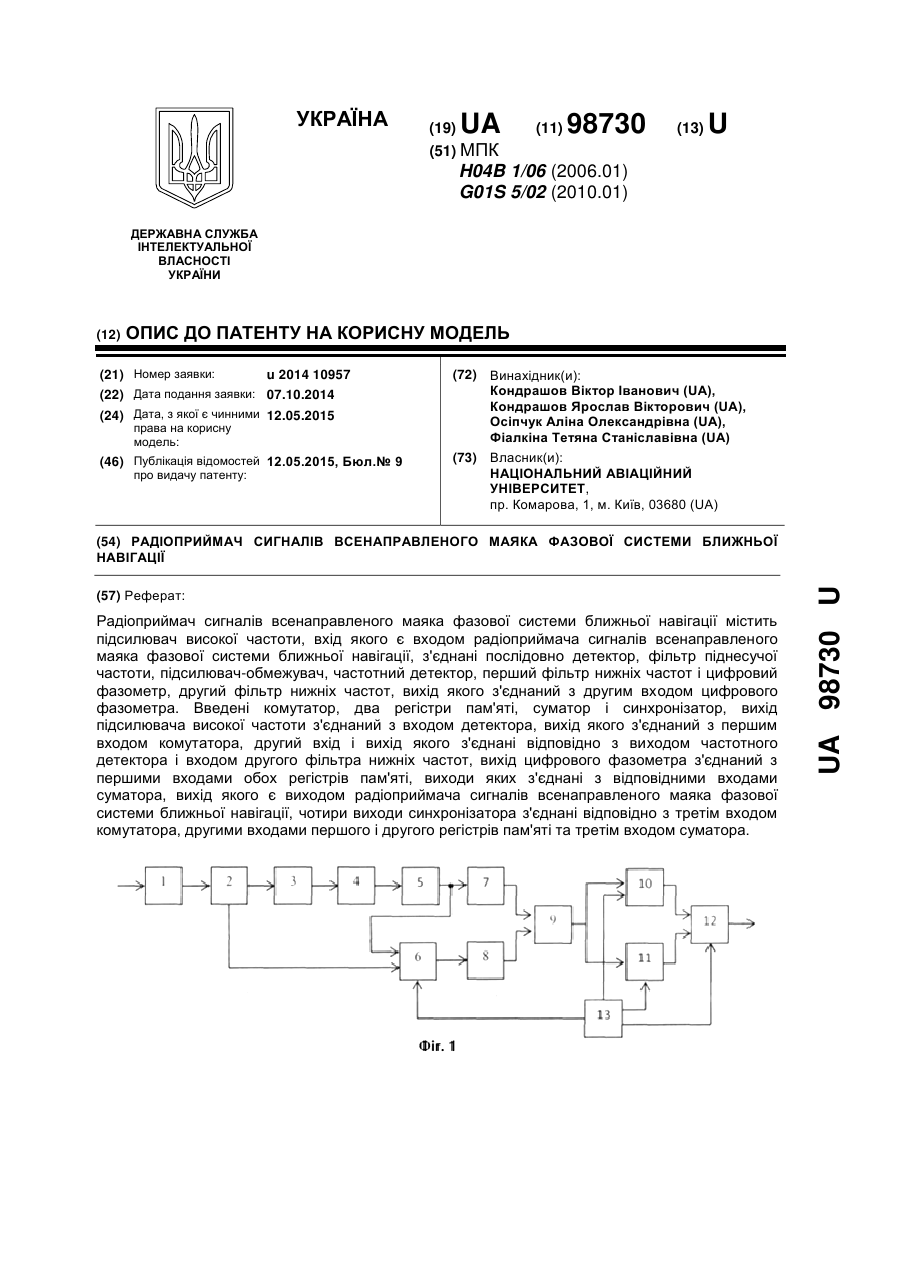
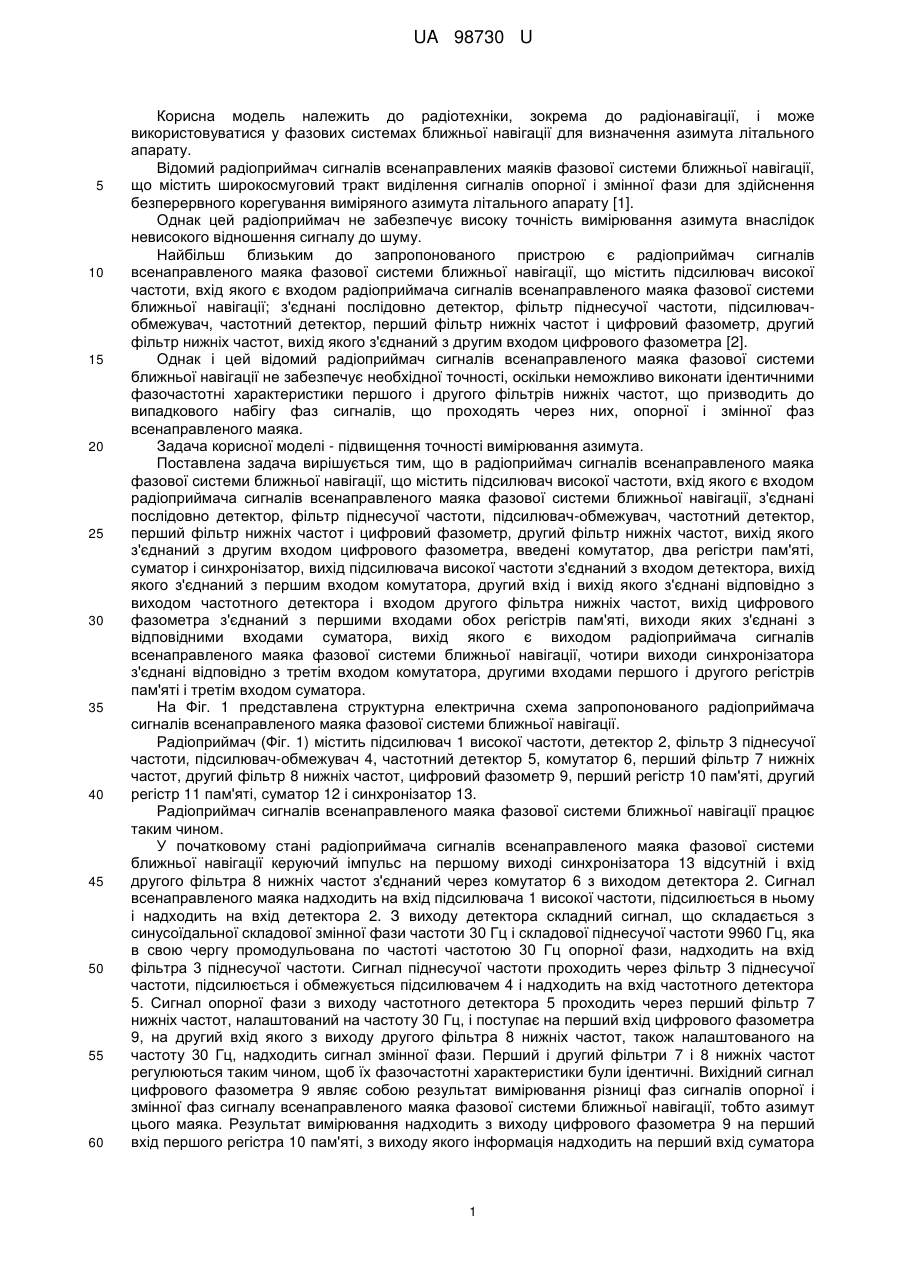
Реферат: Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації містить підсилювач високої частоти, вхід якого є входом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, з'єднані послідовно детектор, фільтр піднесучої частоти, підсилювач-обмежувач, частотний детектор, перший фільтр нижніх частот і цифровий фазометр, другий фільтр нижніх частот, вихід якого з'єднаний з другим входом цифрового фазометра. Введені комутатор, два регістри пам'яті, суматор і синхронізатор, вихід підсилювача високої частоти з'єднаний з входом детектора, вихід якого з'єднаний з першим входом комутатора, другий вхід і вихід якого з'єднані відповідно з виходом частотного детектора і входом другого фільтра нижніх частот, вихід цифрового фазометра з'єднаний з першими входами обох регістрів пам'яті, виходи яких з'єднані з відповідними входами суматора, вихід якого є виходом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, чотири виходи синхронізатора з'єднані відповідно з третім входом комутатора, другими входами першого і другого регістрів пам'яті та третім входом суматора. UA 98730 U (54) РАДІОПРИЙМАЧ СИГНАЛІВ ВСЕНАПРАВЛЕНОГО МАЯКА ФАЗОВОЇ СИСТЕМИ БЛИЖНЬОЇ НАВІГАЦІЇ UA 98730 U UA 98730 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіотехніки, зокрема до радіонавігації, і може використовуватися у фазових системах ближньої навігації для визначення азимута літального апарату. Відомий радіоприймач сигналів всенаправлених маяків фазової системи ближньої навігації, що містить широкосмуговий тракт виділення сигналів опорної і змінної фази для здійснення безперервного корегування виміряного азимута літального апарату [1]. Однак цей радіоприймач не забезпечує високу точність вимірювання азимута внаслідок невисокого відношення сигналу до шуму. Найбільш близьким до запропонованого пристрою є радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації, що містить підсилювач високої частоти, вхід якого є входом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації; з'єднані послідовно детектор, фільтр піднесучої частоти, підсилювачобмежувач, частотний детектор, перший фільтр нижніх частот і цифровий фазометр, другий фільтр нижніх частот, вихід якого з'єднаний з другим входом цифрового фазометра [2]. Однак і цей відомий радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації не забезпечує необхідної точності, оскільки неможливо виконати ідентичними фазочастотні характеристики першого і другого фільтрів нижніх частот, що призводить до випадкового набігу фаз сигналів, що проходять через них, опорної і змінної фаз всенаправленого маяка. Задача корисної моделі - підвищення точності вимірювання азимута. Поставлена задача вирішується тим, що в радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації, що містить підсилювач високої частоти, вхід якого є входом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, з'єднані послідовно детектор, фільтр піднесучої частоти, підсилювач-обмежувач, частотний детектор, перший фільтр нижніх частот і цифровий фазометр, другий фільтр нижніх частот, вихід якого з'єднаний з другим входом цифрового фазометра, введені комутатор, два регістри пам'яті, суматор і синхронізатор, вихід підсилювача високої частоти з'єднаний з входом детектора, вихід якого з'єднаний з першим входом комутатора, другий вхід і вихід якого з'єднані відповідно з виходом частотного детектора і входом другого фільтра нижніх частот, вихід цифрового фазометра з'єднаний з першими входами обох регістрів пам'яті, виходи яких з'єднані з відповідними входами суматора, вихід якого є виходом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, чотири виходи синхронізатора з'єднані відповідно з третім входом комутатора, другими входами першого і другого регістрів пам'яті і третім входом суматора. На Фіг. 1 представлена структурна електрична схема запропонованого радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації. Радіоприймач (Фіг. 1) містить підсилювач 1 високої частоти, детектор 2, фільтр 3 піднесучої частоти, підсилювач-обмежувач 4, частотний детектор 5, комутатор 6, перший фільтр 7 нижніх частот, другий фільтр 8 нижніх частот, цифровий фазометр 9, перший регістр 10 пам'яті, другий регістр 11 пам'яті, суматор 12 і синхронізатор 13. Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації працює таким чином. У початковому стані радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації керуючий імпульс на першому виході синхронізатора 13 відсутній і вхід другого фільтра 8 нижніх частот з'єднаний через комутатор 6 з виходом детектора 2. Сигнал всенаправленого маяка надходить на вхід підсилювача 1 високої частоти, підсилюється в ньому і надходить на вхід детектора 2. З виходу детектора складний сигнал, що складається з синусоїдальної складової змінної фази частоти 30 Гц і складової піднесучої частоти 9960 Гц, яка в свою чергу промодульована по частоті частотою 30 Гц опорної фази, надходить на вхід фільтра 3 піднесучої частоти. Сигнал піднесучої частоти проходить через фільтр 3 піднесучої частоти, підсилюється і обмежується підсилювачем 4 і надходить на вхід частотного детектора 5. Сигнал опорної фази з виходу частотного детектора 5 проходить через перший фільтр 7 нижніх частот, налаштований на частоту 30 Гц, і поступає на перший вхід цифрового фазометра 9, на другий вхід якого з виходу другого фільтра 8 нижніх частот, також налаштованого на частоту 30 Гц, надходить сигнал змінної фази. Перший і другий фільтри 7 і 8 нижніх частот регулюються таким чином, щоб їх фазочастотні характеристики були ідентичні. Вихідний сигнал цифрового фазометра 9 являє собою результат вимірювання різниці фаз сигналів опорної і змінної фаз сигналу всенаправленого маяка фазової системи ближньої навігації, тобто азимут цього маяка. Результат вимірювання надходить з виходу цифрового фазометра 9 на перший вхід першого регістра 10 пам'яті, з виходу якого інформація надходить на перший вхід суматора 1 UA 98730 U 5 10 15 20 25 12. За командою з четвертого виходу синхронізатора 13 суматор 12 виробляє додавання виміряного значення азимута всенаправленого маяка з інформацією інверсного виходу другого регістра 11 пам'яті, яка відповідає нульовому значенню азимута, отриманому під час настройки радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації. Через задані інтервали часу синхронізатор 13 формує на першому виході керуючі команди, які поступають на третій вхід комутатора 6, який обриває зв'язок другого фільтра 8 нижніх частот з виходом детектора 2 та приєднує вхід фільтра 8 нижніх частот до виходу частотного детектора 5, що відповідає процесу вимірювання нульового контрольного значення азимута ΔА на істинній частоті всенаправленого маяка фазової системи ближньої навігації. Нульове значення азимута при контролі по командам з третього виходу синхронізатора 13 записується у другий регістр 11 пам'яті. Після запису нульового контрольного значення азимута у другий регістр 11 пам'яті команди синхронізатора переводять радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації в початковий стан і в перший регістр 10 пам'яті з другого виходу синхронізатора 13 здійснюється запис наступного виміряного значення азимута АВИМ всенаправленого маяка, яке за командою з четвертого виходу синхронізатора 13 підсумовується із зворотнім значенням нульового контрольного значення А, по формулі А=АВИМ+/-ΔА/, де А - виміряне значення азимута з урахуванням компенсації апаратурної похибки, викликаної неідентичністью фазочастотних характеристик фільтрів нижніх частот. Час корекції, тобто час вимірювання нульового контрольного значення азимута, не перевищує 2с і не впливає на безпеку польоту літального апарату. Техніко-економічний ефект запропонованого радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації полягає в підвищенні точності вимірювання азимута в широкому діапазоні робочих температур при зміні частоти модуляції вхідного сигналу, що дозволяє зменшити ширину повітряних коридорів і підвищити безпеку польотів при інтенсивному повітряному русі. Джерела інформації: 1. Патент США № 4212067, Кл. G01S11/00, 1980. 2. Патент США № 368018, Кл. G01S1/44, 1972 (прототип). 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації, що містить підсилювач високої частоти, вхід якого є входом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, з'єднані послідовно детектор, фільтр піднесучої частоти, підсилювач-обмежувач, частотний детектор, перший фільтр нижніх частот і цифровий фазометр, другий фільтр нижніх частот, вихід якого з'єднаний з другим входом цифрового фазометра, який відрізняється тим, що введені комутатор, два регістри пам'яті, суматор і синхронізатор, вихід підсилювача високої частоти з'єднаний з входом детектора, вихід якого з'єднаний з першим входом комутатора, другий вхід і вихід якого з'єднані відповідно з виходом частотного детектора і входом другого фільтра нижніх частот, вихід цифрового фазометра з'єднаний з першими входами обох регістрів пам'яті, виходи яких з'єднані з відповідними входами суматора, вихід якого є виходом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, чотири виходи синхронізатора з'єднані відповідно з третім входом комутатора, другими входами першого і другого регістрів пам'яті та третім входом суматора. 2 UA 98730 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKondrashov Viktor Ivanovych, Fialkina Tetiana Stanislavivna
Автори російськоюКондрашов Виктор Иванович, Фиалкина Татьяна Станиславовна
МПК / Мітки
Мітки: ближньої, системі, радіоприймач, сигналів, навігації, фазової, маяка, всенаправленого
Код посилання
<a href="https://ua.patents.su/5-98730-radioprijjmach-signaliv-vsenapravlenogo-mayaka-fazovo-sistemi-blizhno-navigaci.html" target="_blank" rel="follow" title="База патентів України">Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації</a>
Приймальний пристрій для фазової системи ближньої навігації
Номер патенту: 81371
Опубліковано: 25.06.2013
Автори: Фіалкіна Тетяна Станіславівна, Кондрашов Віктор Іванович, Туренко Дар'я Миколаївна, Кондрашов Ярослав Вікторович
МПК: G01S 1/00
Мітки: навігації, пристрій, системі, ближньої, фазової, приймальний
Формула / Реферат:
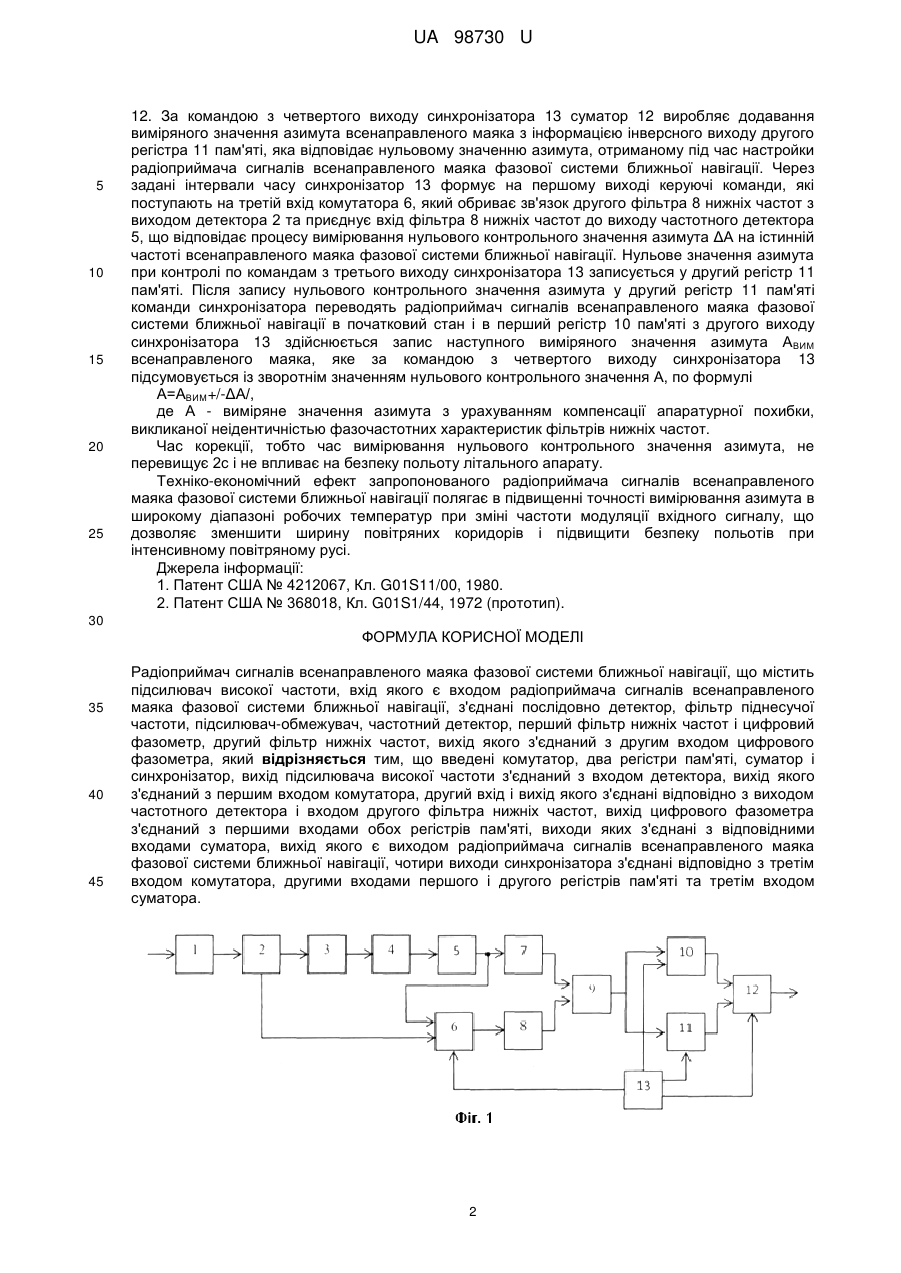
Приймальний пристрій для фазової системи ближньої навігації, який містить синхронізатор, послідовно з'єднані приймач та детектор, послідовно з'єднані перший фільтр піднесучої частоти, перший підсилювач - обмежувач, перший частотний дискримінатор, перший фільтр нижніх частот і фазометр, а також другий фільтр нижніх частот, вихід з якого з'єднаний з другим входом фазометра, який відрізняється тим, що введені перемикач, оперативний...
Пристрій фазової автопідстройки частоти з додатковим каналом фазової компенсації

Номер патенту: 69507
Опубліковано: 25.04.2012
Автори: Макаров Сергій Анатолійович, Меленті Євген Олександрович, Рот Світлана Миколаївна, Чекунова Оксана Миколаївна, Воробйов Руслан Володимирович
МПК: H03L 7/00
Мітки: частоти, каналом, фазової, пристрій, додатковим, компенсації, автопідстройки
Формула / Реферат:
Пристрій фазової автопідстройки частоти з додатковим каналом фазової компенсації містить послідовно з'єднані еталонний генератор, фазовий модулятор, перший фазовий детектор, перший фільтр нижніх частот і генератор керованої напруги, вихід якого з'єднаний із другими входами першого і другого фазових детекторів, а вихід другого фазового детектора з'єднаний з входом другого фільтра нижніх частот, постійна часу якого перевищує постійну часу...
Пристрій фазової автопідстройки частоти

Номер патенту: 61317
Опубліковано: 11.07.2011
Автори: Рот Світлана Миколаївна, Макаров Сергій Анатолійович, Чекунова Оксана Миколаївна, Коломійцев Олексій Володимирович, Шулежко Володимир Васильович, Кулик Олександр Петрович, Лосєв Юрій Іванович, Тітов Ігор Володимирович
МПК: H03L 7/00
Мітки: автопідстройки, пристрій, фазової, частоти
Формула / Реферат:
Пристрій фазової автопідстройки частоти, який містить послідовно з'єднані еталонний генератор, фазовий модулятор, перший фазовий детектор, перший фільтр нижніх частот і генератор керованої напруги, вихід якого з'єднаний із другими входами першого і другого фазових детекторів, а вихід другого фазового детектора з'єднаний з входом другого фільтра нижніх частот, постійна часу якого перевищує постійну часу першого фільтра нижніх частот, при...
Пристрій фазової автопідстройки частоти з динамічно регульованими параметрами елементів зворотного зв’язку з фазовим регулятором
Номер патенту: 94232
Опубліковано: 10.11.2014
Автори: Лєбєдєв Віталій Олександрович, Макаров Сергій Анатолійович, Нікітін Олександр Вікторович, Чекунова Оксана Миколаївна, Юхновський Сергій Анатолійович, Висоцький Олег Володимирович, Гриценко Павло Миколайович, Коломійцев Олексій Володимирович
МПК: H03L 7/00
Мітки: регулятором, пристрій, зв'язку, елементів, параметрами, фазовим, автопідстройки, динамічної, регульованими, частоти, зворотного, фазової
Формула / Реферат:
Пристрій фазової автопідстройки частоти з динамічно регульованими параметрами елементів зворотного зв'язку з фазовим регулятором, який містить послідовно з'єднані еталонний генератор, перший фазовий детектор, перший фільтр нижніх частот, генератор керованої напруги, вихід якого з'єднаний з першим входом фазового модулятора та через фазовий обертач на p/2 з другим входом другого фазового детектора, вихід якого з'єднаний з входом другого...
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра
Номер патенту: 67704
Опубліковано: 12.03.2012
Автори: Лагута Андрій Геннадійович, Мельникович Володимир Борисович, Горін Іван Ярославович, Коврижкін Ігор Олегович, Коврижкін Олег Георгійович
МПК: G01C 21/08
Мітки: спосіб, навігації, сигналів, орієнтації, використанням, визначення, супутникової, магнітометра, літального, апарата, кутової
Формула / Реферат:
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра, у якому вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат, який відрізняється тим, що сигнал курсу
Попередній патент: Кореляційно-екстремальна навігаційна система з функцією оперативного картографування
Наступний патент: Спосіб криптографічного перетворення інформації
Випадковий патент: Електротермічний ракетний двигун малої тяги