Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра
Номер патенту: 67704
Опубліковано: 12.03.2012
Автори: Коврижкін Олег Георгійович, Мельникович Володимир Борисович, Коврижкін Ігор Олегович, Лагута Андрій Геннадійович, Горін Іван Ярославович
Формула / Реферат
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра, у якому вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат, який відрізняється тим, що сигнал курсу ![]() визначають за допомогою системи супутникової навігації, а тангажа
визначають за допомогою системи супутникової навігації, а тангажа ![]() і крену
і крену ![]() визначають за формулами
визначають за формулами
![]() ,
,
![]() ,
,
де:
Hx, Ну, Hz - значення напруженості магнітного поля Землі в зв'язаних осях X, Y, Z літального апарата;
![]() ,
, ![]() - значення кутів тангажа і крену відповідно.
- значення кутів тангажа і крену відповідно.
Текст
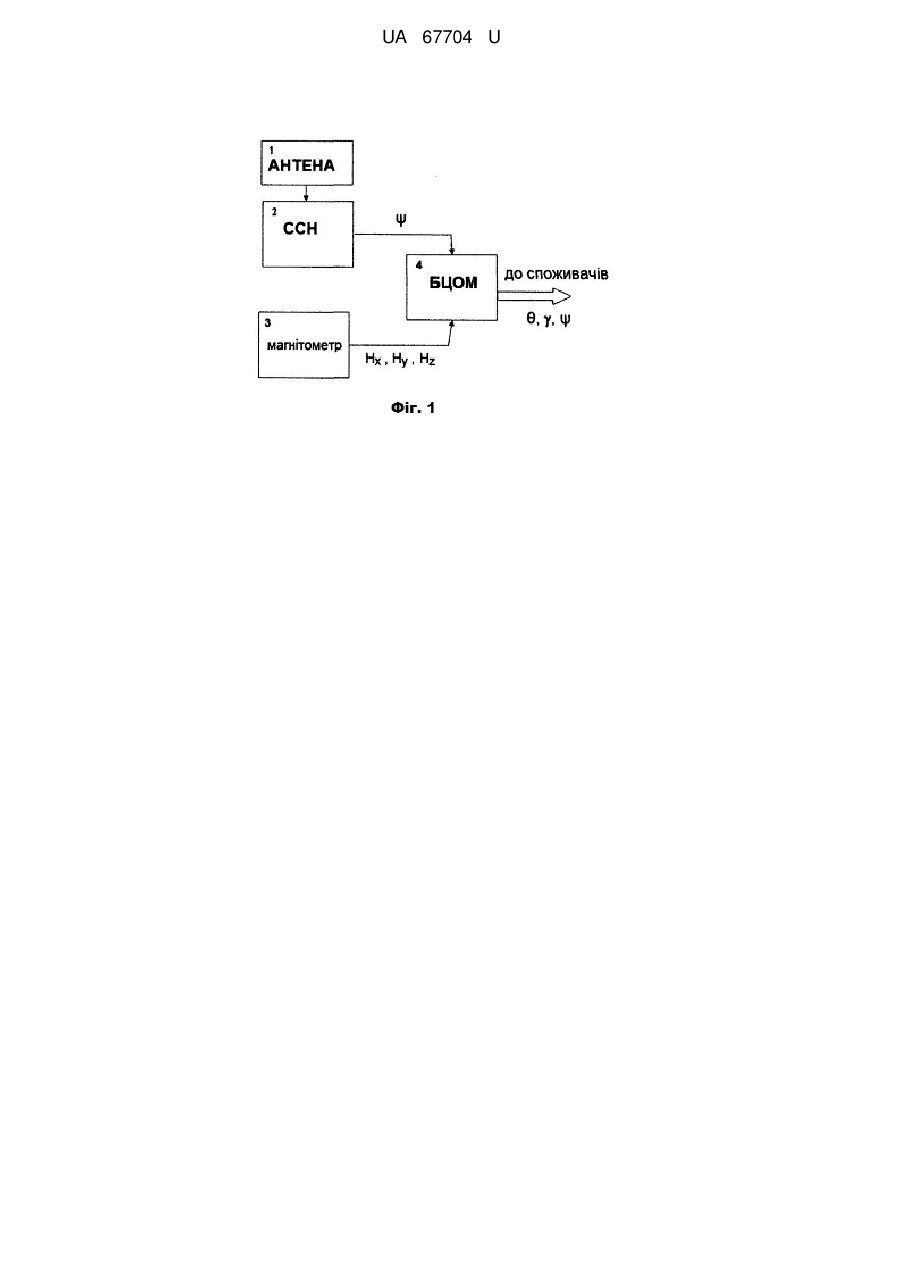
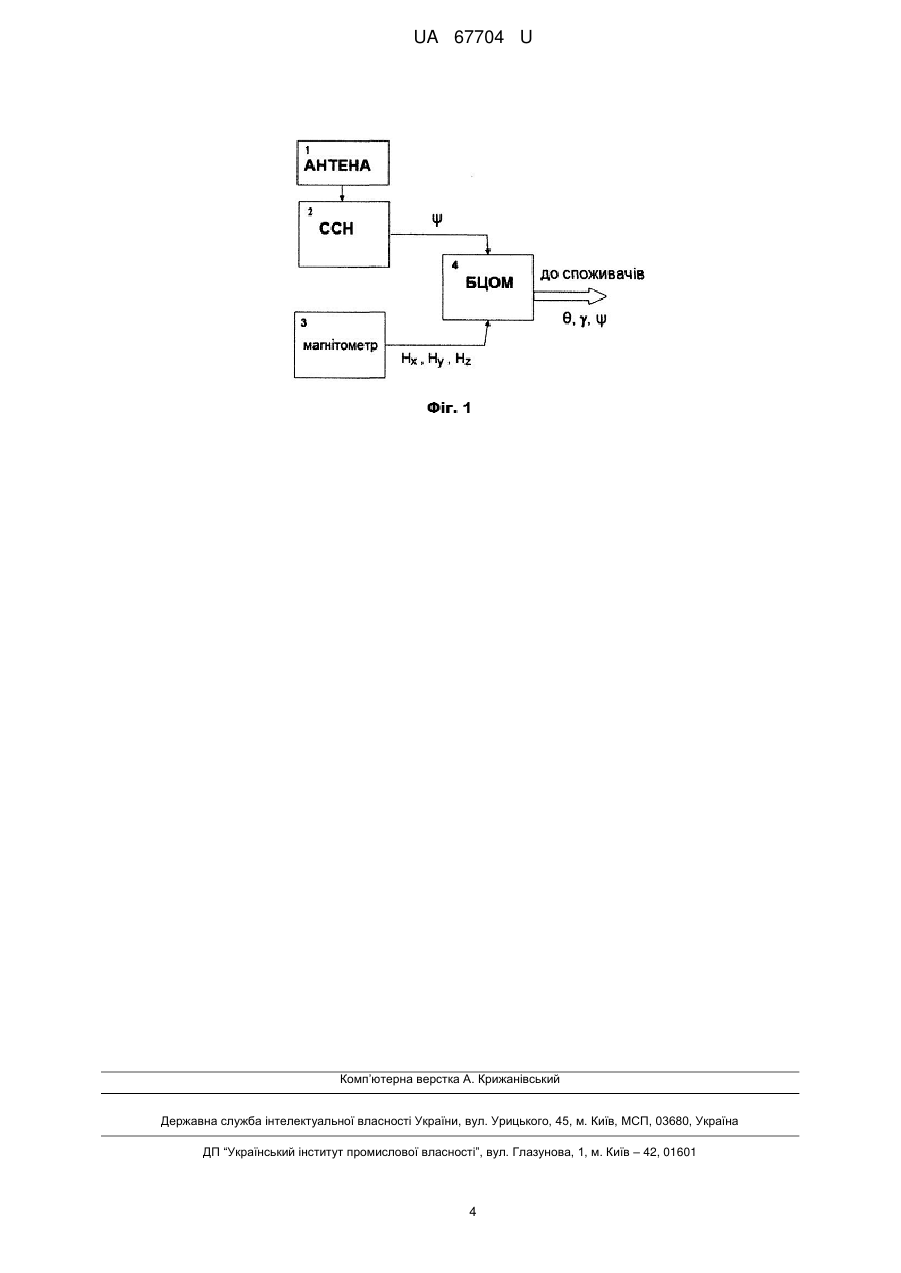
Реферат: У способі визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат. При цьому сигнал курсу визначають за допомогою системи супутникової навігації, а тангажа і крену визначають за формулами arccos(Hx / cos ) , arctg ( Hy cos sin Hz sin ), Hz cos sin Hy sin де: Hx, Ну, Hz - значення напруженості магнітного поля Землі в зв'язаних осях X, Y, Z літального апарата; , - значення кутів тангажа і крену відповідно. UA 67704 U (12) UA 67704 U UA 67704 U 5 10 15 20 25 30 35 Корисна модель належить до авіаційної техніки, зокрема до способів визначення кутової орієнтації літального апарата і може бути використана для інформаційного забезпечення систем навігації та керування польотом. Широко відомі способи визначення кутів орієнтації (курс, тангаж і крен) літального апарата (зв'язана прямокутна система координат) щодо земної нерухомої прямокутної системи координат з використанням гіроскопічних систем (курсовертикалей, гіроплатформ). До недоліків цих систем відноситься те, що вони відносно громіздкі (мінімальна маса порядка ~5 кг) і дорогі. Тому використання таких систем на безпілотних літальних апаратах малих класів (до 100 кг злітної ваги) недоцільно. Також відомі способи визначення курсу за допомогою систем супутникової навігації (GPS, ГЛОНАСС). Найбільш близьким способом, вибраним як прототип заявленої корисної моделі, є "СИСТЕМА КУРСУ І ВЕРТИКАЛІ ТА СПОСІБ ВИЗНАЧЕННЯ МАГНІТНОГО КУРСУ" за патентом Російської Федерації RU 2085850, опублікованим 27.07.1997. Спосіб полягає в тому, що система курсу та вертикалі, яка містить магнітометр, гіроскопічну вертикаль, обчислювач магнітного курсу визначає магнітний курс з вимірювання напруженості магнітного поля Землі за трьома взаємно перпендикулярним осями X, Y, Z системи координат, пов'язаної з літальним апаратом. Сигнали кута танґажа і кута крену отримують з гіроскопічної вертикалі, а магнітний курс визначають за формулою в обчислювачі. Ознаками найближчого прототипу, що збігаються з суттєвими ознаками запропонованої корисної моделі, є вимірювання напруженості магнітного поля Землі за трьома взаємно перпендикулярними осями X, Y, Z системи координат, пов'язаної з літальним апаратом, і використання обчислювача для визначення шуканих величин кутової орієнтації за формулою в обчислювачі (патент Російської Федерації RU 2085850, від 27.07.1997). Недоліком даного способу є те, що для його реалізації, потрібне спеціальне бортове устаткування літальних апаратів-носіїв, а саме, використовується дорога гіровертикаль з незадовільними для малих (безпілотних) літальних апаратів малогабаритними характеристиками, що приводить до суттєвого збільшення сукупної вартості застосовуваного устаткування і потребує участі висококваліфікованого обслуговуючого персоналу. В основу корисної моделі поставлено задачу створення способу визначення кутів тангажа і крену при відомому куті курсу , який не вимагає наявності спеціального дорогого бортового устаткування (гіроскопічних приладів) літального апарата-носія що, в свою чергу, приведе до суттєвого зниження сукупної вартості системи визначення кутової орієнтації літального апарата. Поставлена задача вирішується за рахунок вимірювання сигналів напруженості магнітного поля Землі, здійснюється з використанням трьох магнітометрів, орієнтованих за трьома взаємоперпендикулярними осями зв'язаної з літальним апаратом системи координат, при цьому сигнал курсу визначають за допомогою системи супутникової навігації, а тангажа і крену визначають за формулами 40 arccos(Hx / cos ) , arctg ( 45 50 Hy cos sin Hz sin ), Hz cos sin Hy sin де: Hx, Ну, Hz - значення напруженості магнітного поля Землі в зв'язаних осях X, Y, Z літального апарата; , - значення кутів тангажа и крену відповідно. Наведена нижче фігура креслення пояснює сутність корисної моделі, що заявляється. Фігура креслення, як і опис прикладів конкретного виконання способу, наведені лише для ілюстрації заявленої корисної моделі і не обмежують обсяг прав, визначений формулою корисної моделі. При вимірі магнітного поля векторним вимірювачем (три магнітометри), зв'язаним з осями зв'язаної системи координат БПЛА, вимірюваний вектор може бути представлений у вигляді: H A(, , ) Hз (1) 55 де H- виміряний вектор магнітного поля Землі в зв'язаній системі координат (СК), A - матриця переходу від земної до зв'язаної СК, 1 UA 67704 U , , - кути курсу, танґажа і крену, Hз - повний (одиничний) вектор магнітного поля в земній СК. 5 Відомо, що рівняння (1) не розв'язується однозначно відносно кутів орієнтації. При відомому магнітному схиленні, без обмеження спільності, приймають, Hз z 0 , Hз y 0 . Отже, вважатимемо, що повний вектор напруженості магнітного поля Землі H горизонтальний і направлений на північний полюс, тобто Hз (Hз x, Hз y,Hз z)T (10,0)T , Тут індекс "т" являється символом транспонування. Матриця A має вигляд [3]: 10 cos cos sin sin cos A(, , ) sin sin cos sin cos cos cos cos sin sin sin cos sin sin cos sin cos cos sin cos sin sin sin cos 15 Запропонований спосіб дозволяє визначити кути тангажа і крену при відомому куті курсу , який надходить від GPS - приймача. Тоді, при вказаних допущеннях виміряний вектор H буде рівний: Hx cos cos Hy sin sin cos sin cos Nz sin cos cos sin sin З першого рівняння визначають 20 cos Hx / cos (2) Помножують друге рівняння на cos , третє - на sin і віднімають один від одного: Hz sin Hy cos cos sin 25 (3) Помножують друге рівняння на cos , третє - на sin і додають один до одного: Hz sin Hy cos sin (4) Рівняння (3), (4) розглядають як систему двох лінійних рівнянь відносно невідомих sin і cos . Вирішують цю систему методом Крамера. Головний визначник системи: 30 Hz Hy Hz 2 Hy 2 Hy Hz Часткові визначники, відповідно: sin cos Hz (Hy cos sin Hz sin ) sin Hy cos 35 Hy cos sin Hy sin Hz cos sin Hz sin Визначивши ( 0) , sin sin / i cos cos / , знаходять: tg Hy cos sin Hz sin , Hz cos sin Hy sin (5) 40 Викладений метод непрацездатний в наступних зонах невизначеності: 1. Орієнтація осі магнітометра X близька до положення "горизонтально на північ або на південь". Оскільки вектор H одиничний, головний визначник перетворюється на нуль 2 UA 67704 U Hy 2 Hz2 0 при Nx 1 . Це ж підтверджує рівняння (5), де знаменник прямує до нуля при 5 10 15 20 25 30 одночасному наближенні до нуля (або 180°) кутів танґажа і курсу. 2. Орієнтація осі магнітометра X з курсом 90°, оскільки при цьому cos 0 і немає розв'язки рівняння (2). 3. Вертикальна орієнтація осі магнітометра X (невизначений курс). Для уникнення станів невизначеності пропонують декілька варіантів, найпростішими з яких, є: - алгоритмічна заборона вживання методу при 0 ±180° і 90°, - установка двох (або більше) тріад магнітометричних датчиків під відомими фіксованими кутами відносно один одного з почерговим або одночасним їх використанням (вартість їх невелика). Пристрій визначення кутової орієнтації літального апарата складається із системи супутникової навігації (ССН) 2, магнітометра 3, пов'язаних з бортовою цифровою обчислювальною машиною (БЦОМ) 4, і антени 1, яка приймає сигнали з супутників і подає прийнятий сигнал в систему супутникової навігації. В бортову цифрову обчислювальну машину (БЦОМ) 4 з системи супутникової навігації 2 подають сигнал кута курсу , також в БЦОМ з блоку магнітометра 3 подають сигнали складових вектора напруженості магнітного поля землі по трьох осях зв'язаної з літальним апаратом прямокутної системи координат Hx,Hy,Hz . На підставі значень кута курсу і значень складових вектора напруженості магнітного поля землі по трьох осях зв'язаної з літальним апаратом прямокутної системи координат Нх, Ну, Hz в бортовій цифровій обчислювальній машині 4 розраховують необхідні кути тангажа і крену , отримані за допомогою формул (2) и (5), всі кути орієнтації літального апарата подають споживачам (система навігації, система автоматичного керування та ін.). Спосіб дозволяє забезпечувати споживачів сигналами кутової орієнтації літального апарата відносно земної нерухомої системи координат. Спосіб ефективний при використанні на літальних апаратах класів міні і мікро, а також в якості резервної системи, коли неможливо або недоцільно використання гіроплатформ и гіровертикалей. Для реалізації вказаного способу не потрібне спеціальне бортове устаткування літальних апаратів-носіїв, окрім вказаних и широко використовуваних пристроїв, а саме системи супутникової навігації, трьох взаємно перпендикулярно орієнтованих магнітометрів и обчислювача. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра, у якому вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат, який відрізняється тим, що сигнал курсу визначають за допомогою системи супутникової 40 навігації, а тангажа і крену визначають за формулами arccos(Hx / cos ) , arctg ( Hy cos sin Hz sin ), Hz cos sin Hy sin де: 45 Hx, Ну, Hz - значення напруженості магнітного поля Землі в зв'язаних осях X, Y, Z літального апарата; , - значення кутів тангажа і крену відповідно. 3 UA 67704 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of signals of angular orientation of an aircraft with use of signals of satellite navigation and magnetometer
Автори англійськоюKovryzhkin Oleh Heorhiiovych, Kovryzhkin Ihor Olehovych, Horin Ivan Yaroslavovych, Lahuta Andrii Hennadiiovych, Melnykovych Volodymyr Borysovych
Назва патенту російськоюСпособ определения сигналов угловой ориентации летательного аппарата с использованием сигналов спутниковой навигации и магнитометра
Автори російськоюКоврижкин Олег Георгиевич, Коврижкин Игорь Олегович, Горин Иван Ярославович, Лагута Андрей Геннадьевич, Мельникович Владимир Борисович
МПК / Мітки
МПК: G01C 21/08
Мітки: супутникової, літального, кутової, використанням, спосіб, визначення, навігації, орієнтації, магнітометра, сигналів, апарата
Код посилання
<a href="https://ua.patents.su/6-67704-sposib-viznachennya-signaliv-kutovo-oriehntaci-litalnogo-aparata-z-vikoristannyam-signaliv-suputnikovo-navigaci-ta-magnitometra.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра</a>
Спосіб аеродинамічного корегування польотом вільнопадаючого контейнера з використанням сигналів супутникової навігації
Номер патенту: 60401
Опубліковано: 25.06.2011
Автори: Коврижкін Ігор Олегович, Коврижкін Олег Георгійович, Лагута Андрій Геннадійович, Горін Іван Ярославович, Мельникович Володимир Борисович
МПК: B64D 1/00
Мітки: супутникової, польотом, вільнопадаючого, аеродинамічного, спосіб, корегування, контейнера, навігації, сигналів, використанням
Формула / Реферат:
Спосіб корегування траєкторії вільнопадаючого контейнера з використанням сигналів супутникової навігації, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, зокрема, географічної широти jтд, географічної довготи λтд та висоти Нтд...
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Нестеренко Олег Іванович, Маринич Юрій Михайлович, Збруцький Олександр Васильович
МПК: G01C 19/00
Мітки: спосіб, орієнтації, визначення, кутової, об'єкта
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Герасименко Володимир Вікторович, Слєпов Лев Іванович, Блаженний Валерій Іванович, Щипанський Павло Володимирович
МПК: G01S 5/10
Мітки: спосіб, визначення, місцеположення, літального, апарата
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб гасіння початкової кутової швидкості космічного літального апарата

Номер патенту: 46217
Опубліковано: 10.12.2009
Автори: Ковальчук Михайло Юрійович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: гасіння, апарата, початкової, кутової, спосіб, космічного, швидкості, літального
Формула / Реферат:
Спосіб гасіння початкової кутової швидкості космічного літального апарата, що полягає в тому, що вимірюють початкову кутову швидкість космічного літального апарату, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів і вимикають керуючий сигнал, коли кутова швидкість приймає задане значення, який відрізняється тим, що після вимірювання початкової кутової швидкості знаходять величину імпульсу післядії...
Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата при його просторовій переорієнтації
Номер патенту: 89451
Опубліковано: 25.01.2010
Автор: Рюмін Максим Миколайович
МПК: B64G 1/26
Мітки: літального, формування, спосіб, двигуні, переорієнтації, апарата, орієнтації, просторовий, реактивні, сигналу, керуючого
Формула / Реферат:
Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата (ЛА) при його просторовій переорієнтації, що включає вимірювання поточної орієнтації і кутової швидкості в проекціях на зв'язані осі літального апарата, визначення відхилень обмірюваних кутових параметрів від програмних, формування сигналу керування по відхиленнях шляхом додавання кутових відхилень і складових кутової швидкості обертання, узятих з...
Попередній патент: Пристрій для аналізу активного спектра спрощеними слідкуючими резонаторами
Наступний патент: Освітлювач для оптичного мікроскопа
Випадковий патент: Пристрій для визначення наркотичних речовин в позалабораторних умовах