Пристрій для моделювання нелінійних моделей фізичних об’єктів
Номер патенту: 98987
Опубліковано: 10.07.2012
Автори: Бабак Олег Володимирович, Суровцев Ігор Вікторович, Татарінов Олексій Едуардович
Формула / Реферат
Пристрій для моделювання нелінійних моделей фізичних об'єктів, що містить інтерполятор та коректор, який відрізняється тим, що в нього додатково введені блок введення даних, блок індикації напрямку складових градієнта лінійної функції відгуку, блок комбінаторного перебору моделей-претендентів, другий інтерполятор та датчик якості моделі, при цьому вихід першого інтерполятора підключений до першого входу блока індикації напрямку складових градієнта лінійної функції відгуку, другий вхід якого з'єднаний з виходом блока введення даних, вихід якого з'єднаний також з входом першого інтерполятора, а вихід блока індикації напрямку складових градієнта лінійної функції відгуку підключений до першого входу блока комбінаторного перебору моделей-претендентів, вихід якого з'єднаний з входом другого інтерполятора, вихід якого з'єднаний з першим входом коректора, до другого входу якого підключений датчик якості моделі, причому вихід коректора з'єднаний з другим входом блока комбінаторного перебору моделей-претендентів.
Текст
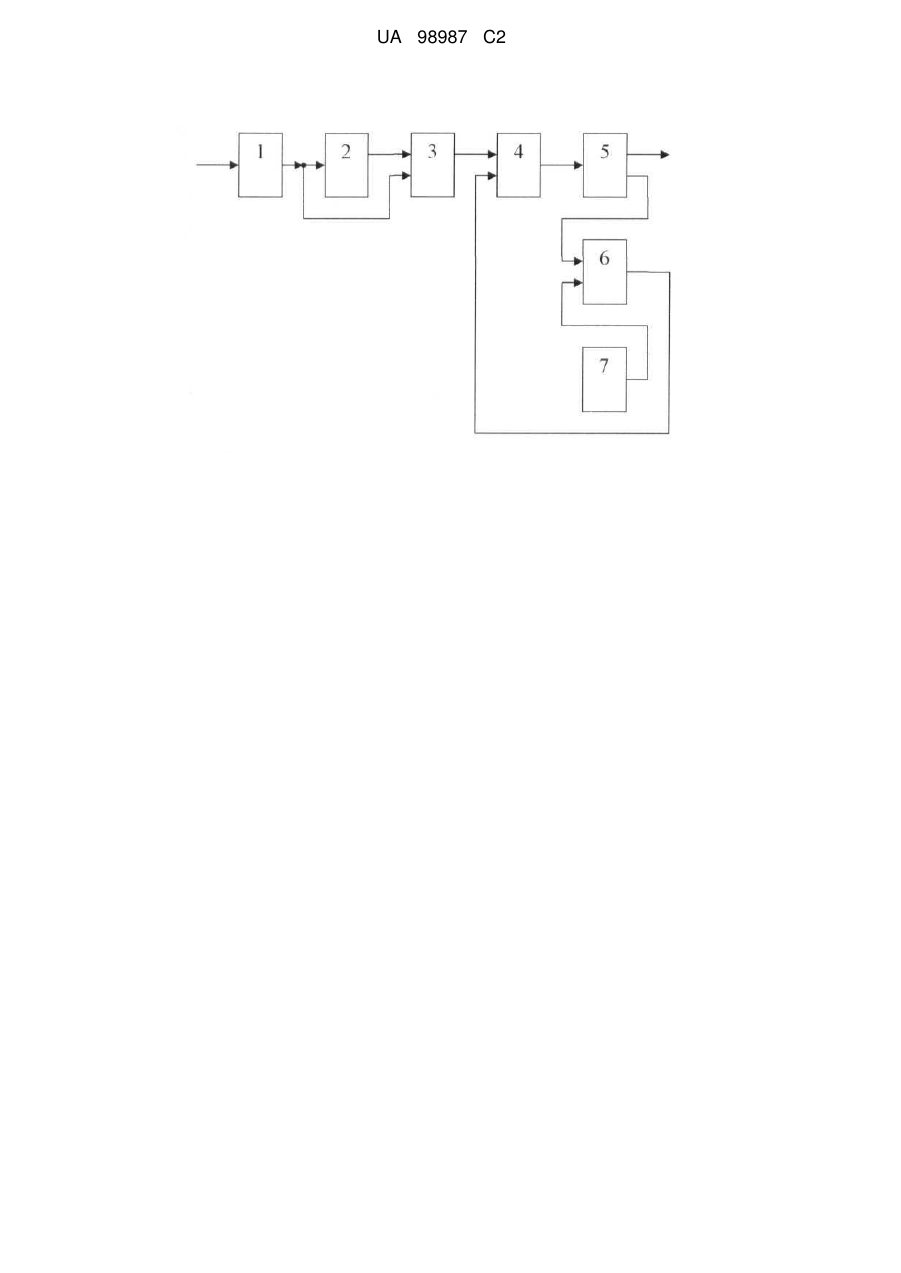
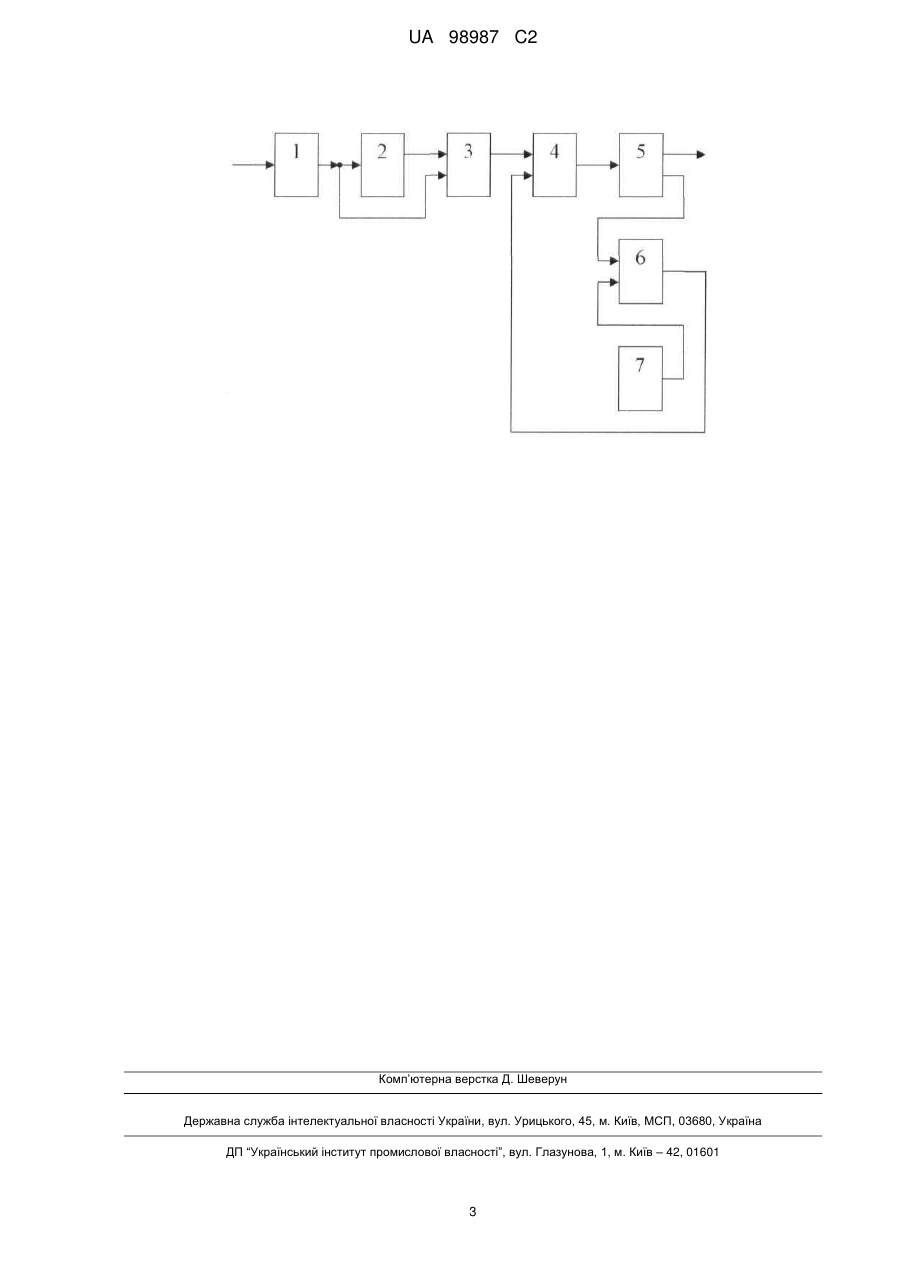
Реферат: Винахід належить до області моделювання при управлінні об'єктами, які мають фізичну природу. Пристрій для моделювання нелінійних моделей фізичних об'єктів містить інтерполятор та коректор. В нього додатково введені блок введення даних, блок індикації напрямку складових градієнта лінійної функції відгуку, блок комбінаторного перебору моделейпретендентів, другий інтерполятор та датчик якості моделі. При цьому вихід першого інтерполятора підключений до першого входу блока індикації напрямку складових градієнта лінійної функції відгуку, другий вхід якого з'єднаний з виходом блока введення даних, вихід якого з'єднаний також з входом першого інтерполятора. Вихід блока індикації напрямку складових градієнта лінійної функції відгуку підключений до першого входу блока комбінаторного перебору моделей-претендентів, вихід якого з'єднаний з входом другого інтерполятора. Вихід другого інтерполятора з'єднаний з першим входом коректора, до другого входу якого підключений датчик якості моделі, причому вихід коректора з'єднаний з другим входом блока комбінаторного перебору моделей-претендентів. Пристрій забезпечує підвищення точності і поліпшення екстраполяційних властивостей нелінійних моделей. UA 98987 C2 (12) UA 98987 C2 UA 98987 C2 5 10 15 20 25 30 35 40 Запропонований винахід належить до області моделювання при управлінні об'єктами, які мають фізичну природу. Відомі пристрої для побудови математичних моделей у вигляді інтерполяційних формул, які описані, наприклад, у монографії Ивахненко А.Г. Кибернетические системы с комбинированным управлением, изд. «Техника», 1966, с. 511 (див. стор. 453-470) [1]. Найбільш близьким за технічною суттю є пристрій «Інтерполятор (учитель) і коректор (учень)» (див. [1], стор. 466), вибраний як прототип. Загальними ознаками пропонованого пристрою і прототипу є інтерполятор, з'єднаний з коректором. Недоліком відомих пристроїв і прототипу є недостатня точність і низькі екстраполяційні властивості нелінійних моделей фізичних об'єктів. Причиною, яка перешкоджає досягнення очікуваного результату, а саме: підвищення точності і поліпшення екстраполяційних властивостей нелінійних моделей фізичних об'єктів, є необхідність урахування фізичних властивостей об'єкта, пов'язаних з напрямком складових градієнта лінійної функції його відгуку. В основу винаходу поставлена технічна задача створення пристрою, який дозволяє підвищити точність і поліпшити екстраполяційні властивості нелінійних моделей фізичних об'єктів. Поставлена задача вирішена за рахунок того, що у пристрої для моделювання нелінійних моделей фізичних об'єктів, який складається з інтерполятора і коректора, блок введення даних з'єднаний зі входом першого інтерполятора, вихід якого підключений до першого входу блока індикації напрямку складових градієнта лінійної функції відгуку, другий вхід якого з'єднаний з виходом блока введення даних, а вихід блока індикації напрямку складових градієнта лінійної функції відгуку підключений до першого входу блока комбінаторного перебору моделейпретендентів, вихід якого з'єднаний з входом другого інтерполятора, який з'єднаний з першим входом коректора, до другого входу якого підключений датчик якості моделі, причому вихід коректора з'єднаний з другим входом блока комбінаторного перебору моделей-претендентів. Пристрій для моделювання нелінійних моделей фізичних об'єктів схематично зображений на кресленні. У пристрої для моделювання нелінійних моделей фізичних об'єктів (див. крес.) блок 1 введення даних з'єднаний зі входом першого інтерполятора 2, вихід якого підключений до першого входу блока 3 індикації напрямку складової градієнта лінійної функції відгуку, другий вхід якого підключений до виходу блока 1 введення даних, а вихід блока 3 індикації напрямку складової градієнта лінійної функції відгуку підключений до першого входу блока 4 комбінаторного перебору моделей-претендентів, вихід якого з'єднаний зі входом другого інтерполятора 5, з'єднаного з першим входом коректора 6, до другого входу якого підключений за датчик 7 якості моделі, причому вихід коректора 6 з'єднаний з другим входом блока 4 комбінаторного перебору моделей-претендентів. Пристрій працює наступним чином. Вихідні дані, у вигляді електричних сигналів, надходять з нелінійного фізичного об'єкта до блоку 1 введення даних у вигляді навчальної вибірки xij , y , i 1, n, j 1, , (1) де 45 - незалежні змінні, - залежна змінна (відгук), - залежна змінна (відгук), - довжина вибірки. Вихід блока 1 даних з'єднаний з входом першого інтерполятора 2, який за даним методом найменших квадратів (МНК) відновлює лінійну функцію відгуку x y n n y a0 aixi, (2) (а - оцінки коефіцієнтів). При цьому знаки "плюс" та "мінус" при оцінках коефіцієнтів аі, вказують на напрямок складових градієнта лінійної функції відгуку, що відображає характер (зменшення або збільшення функції відгуку) фізичних властивостей об'єкта. З виходу першого інтерполятора 2 інформація про напрямки складових градієнта надходить до першого входу блоку 3 індикації напрямку складових градієнта лінійної функції, до другого входу котрого надходять дані (1) з виходу блока 1 введення даних. При цьому в блоці 3 відбувається перетворення до виду i 1 50 55 1 UA 98987 C2 x ij 5 1 , y , i 1 n, j 1 , , . (3) Таким чином, степінь при x в залежності від напрямку складових градієнта лінійної функції відгуку (2) може приймати значення ±1. Приклад 1. Отримана функція відгуку у = а0 + а1х1 - а2х2. Тоді дані (3) з точки зору напрямку складових градієнта приймають вид x1 j1 , x2 1 , y , j 1, . j 10 15 Перетворені дані з блоку 3 надходять до входу блоку 4 комбінаторного перебору моделейпретендентів, в якому послідовно генеруються моделі-претенденти. Приклад 2. У випадку даних прикладу 1 маємо наступні моделі-претенденти, що генеруються: -1 у = b0 + b1x1 + b2x2 , -1 y = b0 + b1x1+b1,2(x1x2 ), -1 -1 y = b0+b2x2 +b1,2(x1x2 ), -1 y = b0+b1,2(x1x2 ). Перетворені дані та моделі-претенденти з блоку 4 послідовно надходять до входу другого інтерполятора 5, забезпеченого засобами відображення моделі-претендента. Із виходу другого інтерполятора 5 послідовно формується сигнал похибки, наприклад, у виді 2 yj j 1 20 25 yj , (4) де y - значення y , що прогнозується моделлю. Сигнал похибки (4) послідовно надходить до першого входу коректора 6, до другого входу котрого надходить сигнал заданої похибки ' із i ' датчика 7. У коректорі 6 відбувається порівняння сигналів ' . Коли з виходу коректора 6 сигнал порівняння послідовно досягає допустимого значення доп комбінаторний перебір завершується. При цьому знайдений при доп модель-претендент вказується засобом відображення інтерполятора 5. З викладеного випливає, що пристрій, який пропонується, може бути реалізовано з допомогою існуючих в теперішній час технічних засобів електронної та обчислювальної техніки, а також можливостей побудови відповідного програмного забезпечення. 30 ФОРМУЛА ВИНАХОДУ 35 40 45 Пристрій для моделювання нелінійних моделей фізичних об'єктів, що містить інтерполятор та коректор, який відрізняється тим, що в нього додатково введені блок введення даних, блок індикації напрямку складових градієнта лінійної функції відгуку, блок комбінаторного перебору моделей-претендентів, другий інтерполятор та датчик якості моделі, при цьому вихід першого інтерполятора підключений до першого входу блока індикації напрямку складових градієнта лінійної функції відгуку, другий вхід якого з'єднаний з виходом блока введення даних, вихід якого з'єднаний також з входом першого інтерполятора, а вихід блока індикації напрямку складових градієнта лінійної функції відгуку підключений до першого входу блока комбінаторного перебору моделей-претендентів, вихід якого з'єднаний з входом другого інтерполятора, вихід якого з'єднаний з першим входом коректора, до другого входу якого підключений датчик якості моделі, причому вихід коректора з'єднаний з другим входом блока комбінаторного перебору моделей-претендентів. 2 UA 98987 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for simulation of nonlinear models of physical objects
Автори англійськоюBabak Oleh Volodymyrovych, Surovtsev Ihor Viktorovych, Tatarinov Oleksii Eduardovych
Назва патенту російськоюУстройство для моделирования нелинейных моделей физических объектов
Автори російськоюБабак Олег Владимирович, Суровцев Игорь Викторович, Татаринов Алексей Эдуардович
МПК / Мітки
МПК: G05B 17/00, G06G 7/48
Мітки: нелінійних, фізичних, моделей, моделювання, об'єктів, пристрій
Код посилання
<a href="https://ua.patents.su/5-98987-pristrijj-dlya-modelyuvannya-nelinijjnikh-modelejj-fizichnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для моделювання нелінійних моделей фізичних об’єктів</a>
Пристрій для моделювання фізичних об’єктів
Номер патенту: 59086
Опубліковано: 10.05.2011
Автори: Суровцев Ігор Вікторович, Татарінов Олексій Едуардович, Бабак Олег Володимирович
МПК: G01D 1/00
Мітки: пристрій, об'єктів, моделювання, фізичних
Формула / Реферат:
Пристрій для моделювання фізичних об'єктів, який містить інтерполятор, з'єднаний з коректором, який відрізняється тим, що він містить блок введення даних, блок індикації напрямку складових градієнта лінійної функції відгуку, блок комбінаторного перебору моделей-претендентів, другий інтерполятор, датчик якості моделі, при цьому інтерполятор виходом підключений до першого входу блока індикації напрямку складових градієнта лінійної функції...
Пристрій для дослідження параметрів моделей періодичних процесів у нейронних мережах
Номер патенту: 64610
Опубліковано: 10.11.2011
Автор: Лехціер Тетяна Ігорівна
МПК: G06N 3/00
Мітки: процесів, пристрій, нейронних, дослідження, параметрів, моделей, періодичних, мережах
Формула / Реферат:
Пристрій для дослідження параметрів моделей періодичних процесів у нейронних мережах, який містить блок введення даних і нейронну мережу, який відрізняється тим, що пристрій оснащено блоком інтегрування функцій, причому вхід цього блока з'єднано з виходом блока введення даних, а вихід блока інтегрування функцій підключено до другого входу нейронної мережі, вихід якої підключено до другого входу блока введення даних.
Пристрій для діагностування несправностей технічних об`єктів

Номер патенту: 13491
Опубліковано: 17.04.2006
Автори: Чирков Дмитро Володимирович, Хорошко Володимир Олексійович, Браіловський Микола Миколайович
МПК: G06F 11/22
Мітки: пристрій, несправностей, об'єктів, технічних, діагностування
Формула / Реферат:
Пристрій для діагностування несправностей технічних об’єктів, що містить послідовно з'єднані датчики, багатоканальний комутатор, блок оцінок, блок індикації, до другого інформаційного входу якого підключений вихід блока введення діагностичної інформації, його вхід з'єднаний з виходом багатоканального комутатора, а також блок введення інформації про стан об'єкта і блока пам'яті, який відрізняється тим, що в нього введені блок обробки...
Пристрій для моделювання імовірності відмов технічної системи
Номер патенту: 34309
Опубліковано: 15.02.2001
Автор: Зеленков Олександр Аврамович
МПК: G06G 7/48, G06G 7/52, G06F 15/00
Мітки: системі, технічної, відмов, імовірності, пристрій, моделювання
Текст:
...до першого входу третьої схеми І 14, другий вхід якої підключений до виходу другого генератора 15 тактових імпульсів, а вихід підключений до входу віднімання третього лічильника 16, вхід скидання якого підключений до виходу першої схеми АБО 11. Вихід третього лічильника 16 з'єднаний із адресними входами постійних запам'ятовуючих пристроїв 171...17r і підключений до входу ци фро - аналогового перетворювача 18, вихід якого підключений...
Пристрій для моделювання оцінки надійності програмних засобів
Номер патенту: 36399
Опубліковано: 16.04.2001
Автор: Зеленков Олександр Аврамович
МПК: G06G 7/48
Мітки: надійності, програмних, оцінки, пристрій, моделювання, засобів
Текст:
...до виходу третього ПЗП 4. Виходи першої 9 і другої 10 схем І підключені відповідно до першого і другого входів др угого елемента АБО 11, вихід якого підключений до першого входу другої схеми порівняння 12 і інформаційного входу першого регістра 1, вхід скидання якого з'єднаний із входом лічильника 13. Інформаційний вхід накопичуючого суматора 14 підключено до виходу четвертого ПЗП 5, а вихід з'єднаний з першим входом блока ділення 16,...
Попередній патент: Оптико-електронний тренажерний пристрій для навчання геодезичним вимірюванням
Випадковий патент: Кінцева станція стрічкового конвеєра