Поляриметричний спосіб вимірювання рельєфу місцевості
Номер патенту: 99137
Опубліковано: 25.05.2015
Автори: Тронько Володимир Дмитрович, Скрипець Андрій Васильович, Клочан Арсен Євгенійович, Романенко Віктор Григорович

Формула / Реферат
Поляриметричний спосіб вимірювання рельєфу місцевості полягає в тому, що за допомогою поляризації світла визначають напрямок у просторі, завдяки якому зв'язують координати однієї точки простору з іншою, який відрізняється тим, що невідома функція шляху, яка описує рельєф, визначається за допомогою азимута площини поляризації світлової хвилі.
Текст
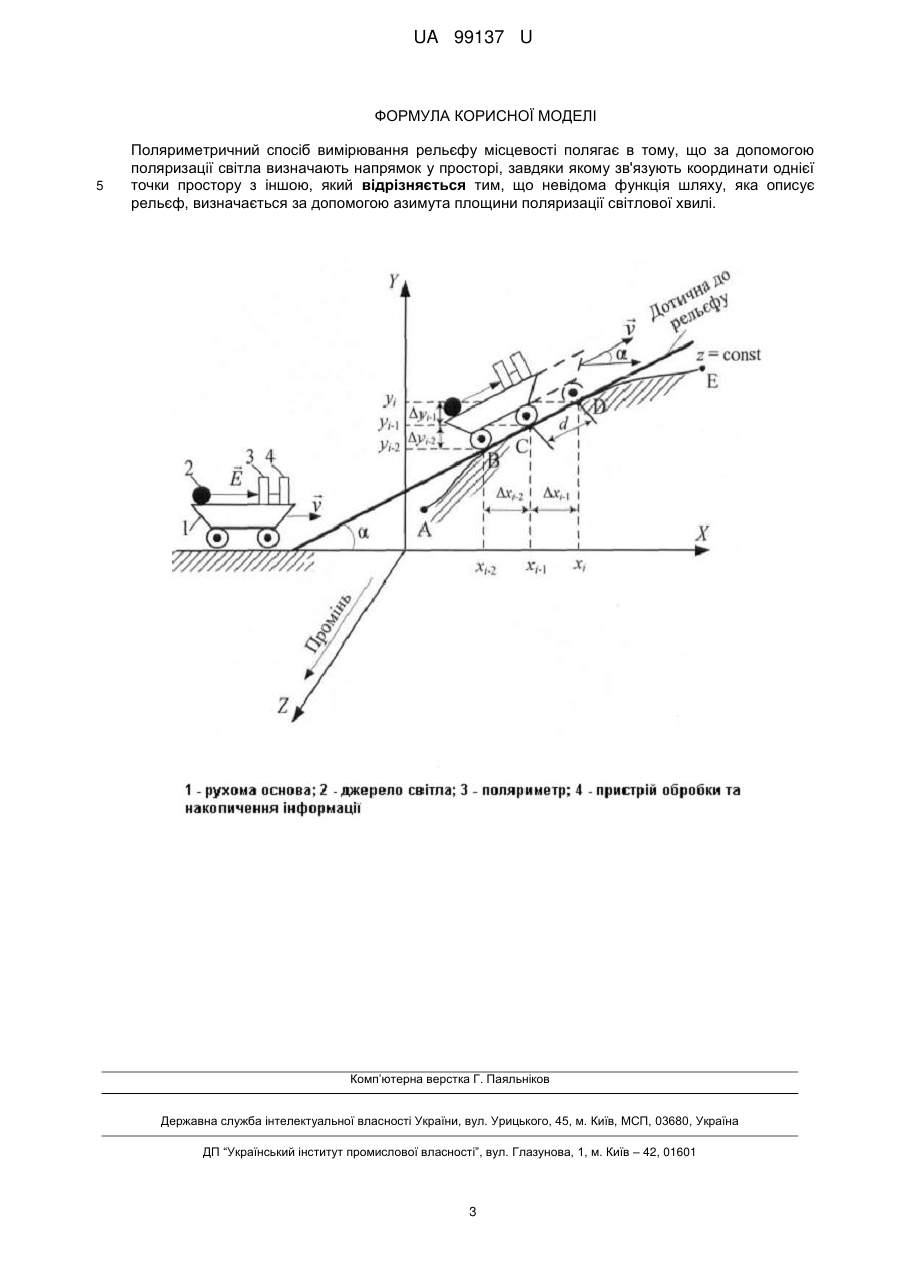
Реферат: Поляриметричний спосіб вимірювання рельєфу місцевості полягає в тому, що за допомогою поляризації світла визначають напрямок у просторі, завдяки якому зв'язують координати однієї точки простору з іншою. Невідома функція шляху, яка описує рельєф, визначається за допомогою азимута площини поляризації світлової хвилі. UA 99137 U (12) UA 99137 U UA 99137 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований спосіб належить до області геодезичних вимірювань і призначений для автоматичного вимірювання рельєфу місцевості, а також може бути використаний для вимірювання ухилів дорожніх та аеродромних покриттів, залізничних шляхів, геометричного опису поверхні складних інженерних об'єктів, наприклад, мостів, дахів будівель, архітектурних елементів. У сучасній наземній геодезії при виконанні вимірювальних робіт стоїть завдання не тільки провести їх з високою точністю, але і якомога з найменшими витратами часу. Більшість існуючих способів, що передбачають застосування геодезичних приладів (теодоліти, нівеліри, світлодальноміри, тахеометри тощо) є високоточними, але разом з тим швидкість забезпечуваного ними вимірювального процесу мала. Значними також є трудовитрати при виконанні вимірювальних робіт, незважаючи на автоматизацію їх окремих операцій. Невисока швидкодія сучасних наземних геодезичних приладів обумовлена особливостями методики вимірювального процесу. Зокрема, в ході вимірювань при визначенні координат довільної геометричної точки рельєфу необхідно сфокусувати її зображення, а потім проводити вимірювання щодо еталонних напрямків за допомогою рівнів, гіроскопів, акселерометрів [4]. А для цього потрібен певний час. Вище зазначені недоліки відсутні у способах, які передбачають застосування супутникових систем [1]. Такі способи по своєму технічному результату є дуже близькими способу, який пропонується. Суть їх вимірювального процесу полягає в наступному. За допомогою приймача користувача налаштовується зв'язок з чотирма супутниками. Вимірюють віддаль від кожного із супутників до приймача користувача, а потім, виходячи з відомих координат супутників, за формулою обчислення відстані між двома точками визначають координати місця положення встановленого приймача користувача. Для реалізації обчислювального процесу достатньо трьох вимірювань віддалей. Четверте вимірювання необхідне для того, щоб визначити різницю у часі між годинниками супутників та годинником приймача. При визначенні відстані в супутникових системах вимірюють фазу електромагнітної хвилі. У геодезичній практиці при здійсненні вимірювань за допомогою супутників використовуються виключно відносні (диференційні) способи, оскільки вони забезпечують найбільш високу точність. При відносних вимірюваннях роботи проводять з застосуванням двох приймачів і одного і того ж сузір'я супутників. За результатами цих вимірювань визначають проекції на осі геометричної системи координат базової лінії, що з'єднує приймачі, відстань між ними, а також кути, що характеризують напрямок базової лінії. Це дозволяє за допомогою GPS проводити вимірювання макро- і мезорельєфу [1]. Слід зазначити, що недоліками вищезазначених способів є неавтономність та застосування спеціального обладнання вартість якого є досить високою. За аналогією з супутниковими системами наземні вимірювання можна також проводити швидко, якщо вимірювати не параметри напрямленого розповсюдження електромагнітної хвилі, а азимут площини поляризації світлової хвилі, тобто використовувати поляриметричний спосіб вимірювань [2, 3]. За допомогою запропонованого поляриметричного способу вимірювання у наземній геодезії та інших галузях вирішується задача одночасного забезпечення високої точності та швидкості вимірювань, автономності та повної автоматизації вимірювального процесу. Забезпечення точності вимірювань досягається завдяки застосуванню поляриметра, а забезпечення швидкості - наявності рухомої основи, на яку установлено поляриметр. Конструктивно основа може бути представлена у вигляді візка, колеса або іншого рухомого об'єкта. Обладнання, яке необхідне для реалізації запропонованого способу, може мати у своєму складі варіативну частину у відповідності до цільових задач, які вирішуються. Але, незважаючи на це, створені на його основі вимірювальні системи здатні забезпечувати автономний вимірювальний процес завдяки наявності в них датчика первинної інформації та пристрою фіксації результатів вимірювань. Забезпечення автоматизації всього вимірювального процесу можливо завдяки відсутності в ньому операції фокусування зображення та вимірювання щодо еталонних напрямків за допомогою рівнів, гіроскопів, акселерометрів. Запропонований спосіб забезпечує значне зменшення витрат часу на проведення вимірювальних робіт. Наявність рухомої основи в конструкції вимірювальної системи дає змогу бути їй мобільною. Запропонованим способом можна проводити роботи як удень, так і вночі, а також при погодних умовах, що спричинюють погану видимість. Він також дозволяє при необхідності проводити експрес-моніторинг місцевості, рельєф якої постійно змінюється, наприклад, злітно-посадкової смуги на аеродромі. 1 UA 99137 U 5 В самому простому випадку спосіб може бути реалізований за допомогою джерела світла 2, поляриметра 3, пристрою обробки та накопичення інформації 4, які встановлено на рухомій основі 1 (креслення). Суть способу полягає в наступному (креслення). Джерело світла 2, в якості якого використовують лазер, генерує світловий промінь. В поляриметрі 3 за допомогою поляризатора світло поляризують. На стартовому майданчику перед початком руху основи 1 відслідковують, 10 15 20 щоб площина коливань світлового вектора E поляризованого світла по відношенню до напряму світлового променя знаходилась під кутом 90°. Рухома основа 1, переміщуючись по поверхні рельєфу, приймає положення, яке відповідає куту α відносно горизонту в певній фіксованій точці маршруту. Завдяки тому, що поляризатор поляриметра 3 жорстко кріпиться до основи 1, площина коливань світлового вектора E поляризованого світла буде також відхилятися на такий же самий кут як і рухома основа. Азимут відхилення цієї площини вимірюється аналізатором поляриметра 3 з високою точністю. Інформація щодо виміряного кута α подається в пристрій обробки та накопичення інформації 4. В ньому обчислюють tgα. Це значення дорівнює кутовому коефіцієнту дотичної прямої та похідній функції в певній фіксованій точці кривої рельєфу. Потім проводять інтегрування tgα, за результатами якого для множини фіксованих точок описують шлях, пройдений вимірювальним пристроєм. Крива лінія цього шляху і буде визначати рельєф. Позначимо довжину рельєфу від точки А до точки Е через S (див. креслення), а відстань між точками дотику коліс платформи з поверхнею рельєфу (точки В, С і D) - d, швидкість переміщення платформи - ν. Визначення похідної проводиться за допомогою формул: y dy x , dx dy tg . dx 25 Вимірювання кута α проводиться через проміжки часу, що дорівнюють t d , таких t S . Поточне i-те вимірювання значень х і у при рівномірному русі t d вимірювань буде N рухомої основи по поверхні рельєфу дорівнює: n x x n x i ; x i1 x i x i1 d cos i ; i1 n y y n y i ; y i1 y i y i1 d cos i . i1 n n i 1 i1 n n n i1 30 i 1 i 1 x x n x i cos i n n d d cos i d cos i ; i1 i 1 y y n y i d sin i d sin i . 35 40 За отриманими значенням будується залежність y n ƒ x n або y ƒ x , яка описує криву поверхні рельєфу. Таким чином, за допомогою поляризації світла визначають напрямок у просторі, завдяки якому зв'язують координати однієї точки простору з іншою. Список використаних джерел 1. Генике А.А., Побединский Г.Г. Глобальная спутниковая система определения местоположения GPS и ее применение в геодезии. - М.: Картгеоцентр, 2005. - 286 с. 2. Дерюгин И.А., Кузнецов Ю.А., Тронько В.Д. Фотоэлектрический поляриметр инфракрасного диапазона. - Л.: Оптика и спектроскопия, 1970. - С. 415-418. 3. Шерклифф У. Поляризованный свет / У. Шерклифф; пер. с англ. под ред. Н.Д. Жевандрова. - М: Мир, 1965. - 264 с. 4. Боровна В.О., Борисюк Л.В., Бурачек В.Г. Автоматизація геодезичних вимірювань. Чернігів: Чернігівські обереги, 2004. - 368 с. 45 2 UA 99137 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Поляриметричний спосіб вимірювання рельєфу місцевості полягає в тому, що за допомогою поляризації світла визначають напрямок у просторі, завдяки якому зв'язують координати однієї точки простору з іншою, який відрізняється тим, що невідома функція шляху, яка описує рельєф, визначається за допомогою азимута площини поляризації світлової хвилі. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюSkrypets Andrii Vasyliovych, Tronko Volodymyr Dmytrovych, Romanenko Viktor Hryhorovych
Автори російськоюСкрипец Андрей Васильевич, Тронько Владимир Дмитриевич, Романенко Виктор Григорьевич
МПК / Мітки
МПК: G01B 15/00
Мітки: поляриметричний, спосіб, вимірювання, рельєфу, місцевості
Код посилання
<a href="https://ua.patents.su/5-99137-polyarimetrichnijj-sposib-vimiryuvannya-relehfu-miscevosti.html" target="_blank" rel="follow" title="База патентів України">Поляриметричний спосіб вимірювання рельєфу місцевості</a>
Оптичний коноскопічний пристрій для вимірювання рельєфу поверхні
Номер патенту: 78818
Опубліковано: 25.04.2007
Автори: Галкін Олександр Олексійович, Кравченко Вілен Йосипович, Плаксій Юрій Степанович, Мамілов Сергій Олександрович, Єсьман Сергій Степанович
МПК: G03H 1/00, G01B 11/24
Мітки: поверхні, оптичний, пристрій, рельєфу, коноскопічний, вимірювання
Формула / Реферат:
Оптичний коноскопічний пристрій для вимірювання рельєфу поверхні, що містить освітлювач з монохроматичним джерелом випромінювання, двозаломний кристал, розміщений між двома круговими поляризаторами, фотоприймач типу цифрової камери на приладі з зарядовим зв’язком і процесор для обробки серії інтерферограм, який відрізняється тим, що як двозаломний кристал використаний кристал з електрооптичними властивостями, що має на гранях електроди, а до...
Спосіб моделювання рельєфу поверхні індивідуальної ортопедичної устілки
Номер патенту: 63349
Опубліковано: 10.10.2011
Автори: Джерелій Олег Борисович, Климовицький Володимир Гарійович
МПК: A61F 5/14
Мітки: спосіб, устілки, поверхні, індивідуальної, ортопедичної, рельєфу, моделювання
Формула / Реферат:
Спосіб моделювання рельєфу індивідуальної ортопедичної устілки, що включає створення відповідної стопі пацієнта форми її поверхні, який відрізняється тим, що моделювання рельєфу поверхні устілки здійснюється шляхом заповнення її порожнин з герметичними стінками гелем під контролем комп'ютерної тензографії.
Спосіб визначення рельєфу та рівня поверхні матеріалів
Номер патенту: 31522
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01F 23/28, G01B 15/00
Мітки: матеріалів, визначення, рівня, поверхні, спосіб, рельєфу
Текст:
...17.,.20, І відповідають умові стрибкоподібної зміни температури. Така уме аиникас в зоні стикуванняt контрольованої поверхні 1 зі стінками колосники г тобто в шуканих точках 13.. Л 6. Попередні значення координат додаткових точок поверхні площинах 21 і 22 задають у відповідності з типовими розрахункова профілями 23 і 24 поверхні, причому ці профілі суміщують попередньо визначеними точками відповідно 15, 8, 16 і 13, 9, Додаткові...
Поляриметричний радіолокатор
Номер патенту: 34917
Опубліковано: 26.08.2008
Автори: Аверьянов Анатолій Олексійович, Авер'янова Юлія Анатоліївна, Яновський Фелікс Йосипович
МПК: G01S 13/00
Мітки: радіолокатор, поляриметричний
Формула / Реферат:
Поляриметричний радіолокатор, що містить генератор зондувального сигналу, вхід якого з'єднаний з хронізатором, передавальну антену, вхід якої підключений до виходу генератора та яка налаштована на випромінювання електромагнітного коливання з фіксованою поляризацією, приймач, давач положення антен, з'єднаний з передавальною антеною та приймальними антенами, блок обробки прийнятих сигналів і визначення поляриметричних параметрів, вхід якого...
Спосіб прогнозування живучості алюмінієвого сплаву д16ат по деформаційному рельєфу поверхні
Номер патенту: 65204
Опубліковано: 25.11.2011
Автори: Маслак Тетяна Петрівна, Карускевич Михайло Віталійович, Ігнатович Сергій Ромуальдович, Щепак Сергій Вікторович
МПК: G01N 3/32
Мітки: прогнозування, живучості, спосіб, д16ат, алюмінієвого, деформаційному, сплаву, поверхні, рельєфу
Формула / Реферат:
Спосіб прогнозування живучості алюмінієвого сплаву Д16АТ по деформаційному рельєфу поверхні, при якому контролюють стан поверхні за допомогою оптичного мікроскопа, цифрової фотокамери і спеціально розробленого програмного забезпечення, який відрізняється тим, що при виконанні оцінки накопиченого втомного пошкодження визначають не тільки довговічність конструкції, а і живучість конструкції.
Попередній патент: Спосіб ідентифікації компонентів однотипних проб, розділених методом тонкошарової хроматографії
Наступний патент: Кольчуга
Випадковий патент: Сільськогосподарська машина для внесення добрив зі змінюваною шириною колії