Спосіб визначення середнього значення лінійної швидкості
Номер патенту: 10009
Опубліковано: 30.09.1996
Автори: Квашньов Юрій Олександрович, Шевченко Констянтин Леонідович, Скрипник Юрій Олексійович



Текст
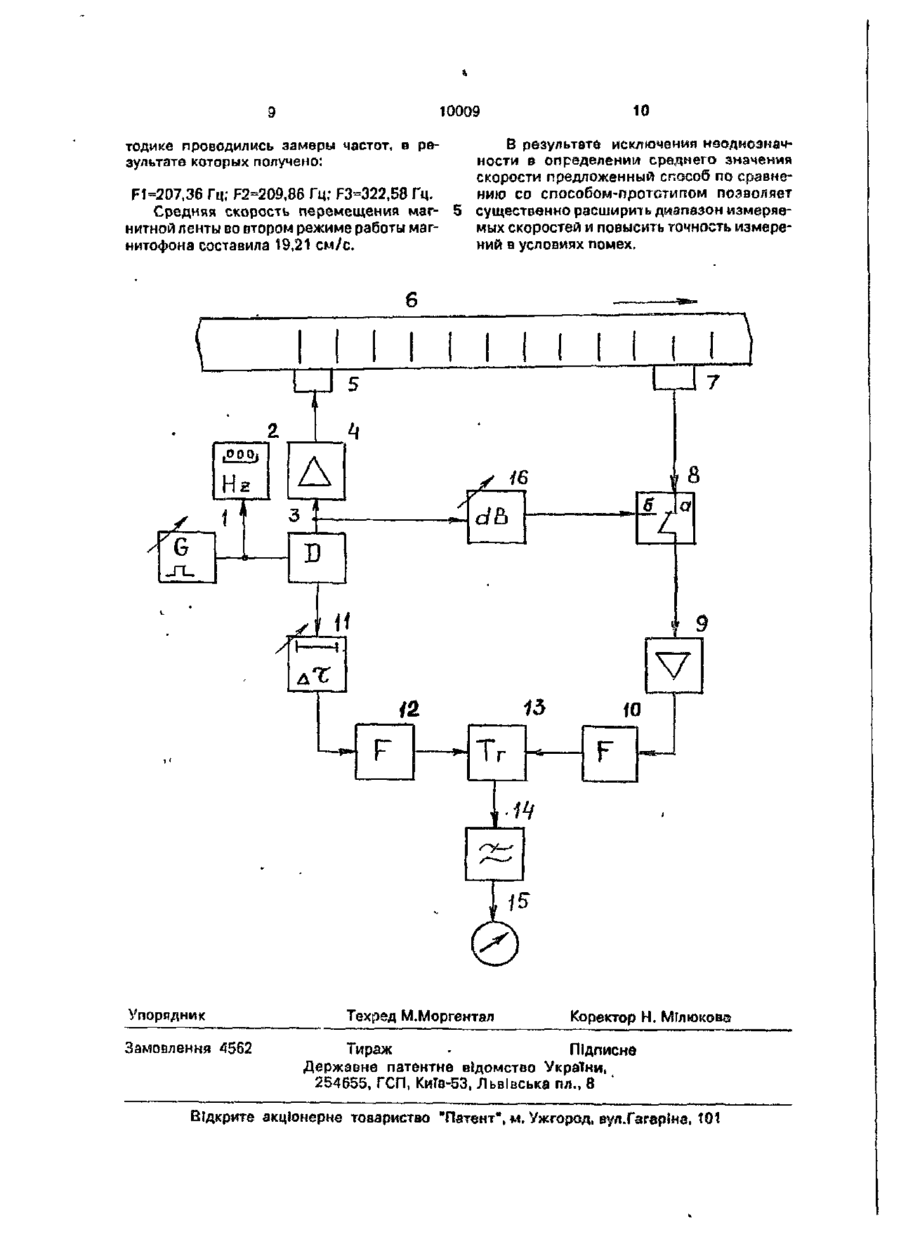
Способ определения среднего значения линейной скорости движущейся среды, включающий генерирование последовательности электрических импульсов, разделение этой последовательности на опорные и зондирующие импульсы, преобразование зондирующих импульсов в физические метки в движущейся среде, прием детектором меток на фиксированной длине контрольного участка пути, преобразование их в электрические измерительные импульсы, формирование временного интервала между опорным и ближайшим измерительным Изобретение относится к области измерения линейных скоростей путем измерения времени перемещения какой-либо характерной части (метки) на движущейся среде на импульсом, изменение частоты следования генерируемых импульсов до совпадения последующего опорного импульса с измерительным импульсом, измерение частоты Fi их следования и определения среднего значения линейной скорости по частоте генерируемых импульсов и длине контрольного участка пути, о т л и ч а ю щ и й с я тем, что опорные импульсы задерживают на время, меньшее полупериода следования зондирующих импульсов, после чего увеличивают частоту следования генерируемых импульсов до значения, при котором опорные импульсы совпадают с измерительными импульсами и измеряют частоту Fa их следования, после чего ослабляют уровень зондирующих импульсов до уровня измерительных импульсов, увеличивают частоту следования генерируемых импульсов до совпадения опорных и зондирующих импульсов и измеряют частоту F3 их следования, при этом среднее значение линейной скорости определяют как у где Fi, F2, Fa-частоты следования генерируемых импульсов, соответственно при первом, втором и третьем измерении; L-длина контрольного участка пути. контрольном участке пути и может быть использовано для определения среднего значения скорости рулонных материалов, а также скорости потоков жидкостей и газов. 10009 Известен способ определения среднего включающем генерирование последовазначения линейной скорости [2], заключаютельности электрических импульсов, раздещийся в генерировании последовательности ление этой последовательности на опорные электрических импульсов, преобразовании и зондирующие импульсы, преобразование электрических импульсов D метки соответст- 5 зондирующих импульсоо о физические метвующей физической природы в движущейся ки в движущейся среде, прием детектором среде, приеме детектором меток на фиксиметок на фиксированной длине контрольнорованной длине контрольного участка пути, го участка пути, преобразование их в электпреобразовании их в электрические измерические измерительные импульсы, рительные импульсы, формировании вре- 10 формирование временного интервала межменного интервала между генерируемыми ду опорным и ближайшим измерительным и измерительными импульсами, изменении импульсом, изменение частоты следования частоты следования генерируемых имгенерируемых импульсов до совпадения попульсов до совпадения последующего геследующего опорного импульса с измеринерируемого импульса с измерительным 15 тельным импульсом, измерение частоты F1 импульсом, измерении частоты следования их следования и определения среднего знасовпадающих импульсов и определении чения линейной скорости по частоте генерисреднего значения линейной скорости по руемых импульсов и длине контрольного формуле участка пути, согласно изобретению, опор20 ные импульсы задерживают на время, меньшее полупериодэ следования зондирующих импульсов, после чего увеличивают частоту следования генерируемых импульсов до значения, при котором опорные импульсы где L- длина контрольного участка пути; Т - период повторения меток, равный 25 совпадают с измерительными импульсами и времени прохождения контрольного участизмеряют частоту F2 их следования, после ка; чего ослабляют уровень зондирующих импульсов до уровня измерительных импульF - частота следования меток. сов, увеличивают частоту следования В известном способе обеспечивается прямая пропорциональность между изме- 30 генерируемых импульсов до совпадения ряемой скоростью и частотой следования опорных и зондирующих импульсов и измеметок. ряют частоту F3 их следования, при этом Недостатком способа является неодносреднее значение линейной скорости V опзначность результатов определения скороределяют как сти в случае, когда период следования 35 импульсов кратен времени прохождения w F3-(F2-F1H v меткой контрольного участка. В этом случае " F2 метка, выделенная детектором, может совпадать как с первой последующей меткой, где F1, F2, F3 - частоты следования генеритак и со второй, третьей и более поздними 40 руемых импульсов соответственно при перметками. Из-за появления неоднозначности вом, втором и третьем измереимях, о фиксировании совпадения меток, следуюL-длина контрольного участка пути. щих с высокой частотой повторения, сужаНа чертеже представлена блок-схема ется диапазон однозначного определения устройства для осуществления способа опскорости и существенно снижается точ- 45 ределения среднего значения линейной ность измерения при расширении диапазоскорости движущейся среды. на измеряемых скоростей. Устройство содержит генератор имВ основу изобретения положена задача пульсов регулируемой частоты 1, к которому создать способ определения среднего знаподключены частотомер 2 и распределитель чения линейной скорости, в котором иск- 50 импульсов 3. К первому входу распределилючалась Бы неоднозначность измерений теля импульсов 3 подключены последовапри длительности периода следования метельно соединенные усилитель импульсов А, ток, меньшем времени прохождения меткаисточник меток 5, движущаяся среда б, деми контрольного участка пути, благодаря тектор меток 7, переключатель 8, усилитель чему повысилась бы точность измерений и 55 импульсов 9 и формирователь импульсов 10, расширился диапазон измеряемых скороа ко второму входу - одноаибратор 11 и форстей мирователь импульсов 12. Выходы формиПоставленная задача решается тем, что рооателей импульсов 10 и 12 соединены со а способе определения среднего значения входами триггера 13, к которому подключелинейной скорости движущейся среды, ны фильтр нижних частот 14 и индикатор 15. 10009 Устройство содержит также аттенюатор 16. подключенный к пероому входу распределителя импульсов 3, при этом выход аттенюатора соединен со вторым входом переключателя 8. 5 Определение среднего значения линейной скорости производится следующим образом, Последовательность выходных импульсов генератора 1 разделяют на опорные и 10 зондирующие импульсы с помощью распределителя импульсов 3. Зондирующие импульсы усиливаются в усилителе 4 и воздействуют на источник меток 5. В качестве источника меток используют электроды, 15 катушки, излучатели при создании ионизационных, диэлектрических, магнитных меток или дозаторы при вводе или нанесении вещества-индикатора на движущуюся среду. Движущиеся со средой 6 метки считы- 20 ваются детектором 7 и преобразуются в электрические измерительные импульсы. В качестве детекторов меток также могут использоваться электроды, катушки, счетчики частиц, малоинерциоиные термопреобра- 25 зователи, фотоэлементы и тому подобное. Измерительные импульсы через преобразователь 8 поступают на усилитель 9, где усиливаются до постоянного уровня. Из усиленных импульсов формирователем 10 30 создаются короткие импульсы, которые поступают на один из входов триггера 13. Опорные импульсы возбуждают одновибратор 11 с регулируемым временем задержки. Из задержанных выходных импульсов одно- 35 вибратора формирователем 12 создаются короткие импульсы, поступающие на второй вход триггера 13. Измерительные импульсы запаздывают относительно опорных импульсов на время 40 прохождения контрольного участка пути между источником 5 и детектором 7 меток. L-F (2) где F=1/T - частота следования импульсов (меток); Е[А] - целая часть числа А. Длительность выходных импульсов триггера 13 пропорциональна дробной части времени задержки меток = — -п -Т= —— п і у v L £k (3) Из последовательности выходных импульсов триггера 13 фильтром 14 нижних частот выделяют постоянную составляющую напряжения, которую регистрируют индикатором 15. Частоту следования импульсов F предварительно устанавливают такой, чтобы обеспечить стабильные показания индикатора 15. Это обеспечивается повышением частоты следования меток, при котором возрастает отношение сигнал/помеха на выходе фильтра до требуемого значения. После достижения стабильных показаний индикатора 15 плавно изменяют частоту F следования импульсоо до совпадения последующих опорных импульсоо с принимаемыми измерительными импульсами. При достижении оТ1=0 получают (4) где F1 - частота следования совпадающих импульсов. Измеряют частоту следования F1 импульсов (меток) частотомером 2. Дополнительно задерживают опорные импульсы одновибратором 11 на время, которое превышает порогчувствителыюсти индикатора 15, но меньше полупериода следования импульсов. Для этого плавно увеличивают поо t=L/V, стоянную времени одновибратора 11 до 0) 45 достижения максимальных показаний ингде О\- время прохождения контрольного дикатора 15. Затем постоянную времени участка пути; уменьшают до значения, при котором покаL - длина контрольного участка пути; зания индикатора достигают половинного V - скорость движения среды (меток). значения. В результате дополнительной заДлительность выходных импульсов 50 держки длительность выходных импульсов триггера 13 будет определяться разностью триггера 13 принимает значение времен прихода опорных импульсов и ближайших к ним задержанных измерительных (5) импульсов. Вначале задержка, вводимая одиовибротэром 11, устанавливаемся равной 55 нулю. Если период следования импульсов • где ОТО - дополнительная задержка, вносиравен Т, то опорный и соответствующий ему мая одновибратором. измерительный импульсы будут разделены Далее увеличивают частоту следования количеством импульсов импульсов до значения, при котором восста 10009 нэвливастся совпадение импульсов. При оТ2=0 получают L-tfrtKn.-rc-.JL. (6) где F2 - частота следования импульсов (меток) при втором совпадении. Измеряют значение частоты F2 частотомером 2. Затем переключатель 8 переводят 10 в противоположное состояние. При этом зондирующие импульсы через аттенюатор 16 непосредственно поступают на усилитель 9. Ослабление, вносимое аттенюатором 16 выбирают равным ослаблению, которое испы- 15 тывают зондирующие импульсы в процессе преобразования а метки, приеме меток и преобразовании их в измерительные импульсы В результате формирования коротких импульсов из ослабленных зондирующих 20 импульсов на выходе триггера 13 формируются импульсы длительностью Т2 (7) 25 2 Увеличивают частоты следования импульсов до достижения совпадения. Так как дополнительная задержка оТ0
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of average value of linear velocity
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Kvashniov Yurii Oleksandrovych, Shevchenko Kostiantyn Leonidovych
Назва патенту російськоюСпособ определения среднего значения линейной скорости
Автори російськоюСкрипник Юрий Алексеевич, Квашнев Юрий Александрович, Шевченко Константин Леонидович
МПК / Мітки
МПК: G01P 3/42
Мітки: визначення, середнього, швидкості, спосіб, значення, лінійної
Код посилання
<a href="https://ua.patents.su/6-10009-sposib-viznachennya-serednogo-znachennya-linijjno-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення середнього значення лінійної швидкості</a>
Пристрій для обчислювання змінного середнього значення
Номер патенту: 6597
Опубліковано: 29.12.1994
Автор: Єлманов Сергій Олександрович
МПК: G06F 17/15
Мітки: обчислювання, пристрій, середнього, змінного, значення
Формула / Реферат:
(57) Устройство для вычисления скользящего среднего значения содержащее сумматор два блока вычитания, первый блок деления и два блока элементов задержки причем информационный вход первого блока элементов задержки является информационным входом устройства тактовый вход которого соединен с тактовыми входами первого блока деления и первого и второго блоков элементов задержки, выход первого блока элементов задержки соединен со входом вычитаемого...
Спосіб визначення дальності
Номер патенту: 3056
Опубліковано: 26.12.1994
Автори: Квашньов Юрій Олександрович, Глазков Леонід Олександрович, Скрипник Юрій Олексійович
МПК: G01S 13/12
Мітки: спосіб, дальності, визначення
Формула / Реферат:
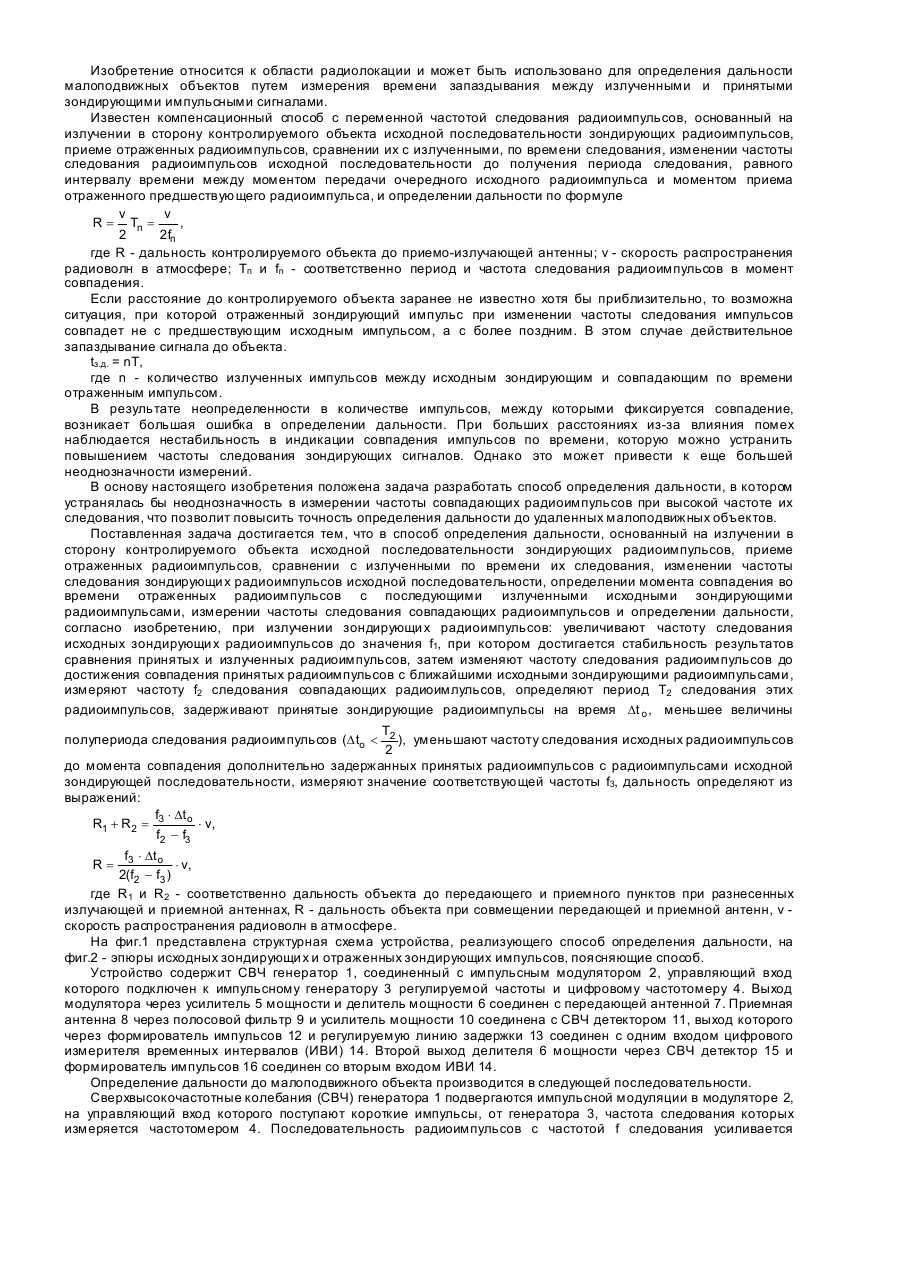
Способ определения дальности, основанный на излучении в сторону контролируемого объекта исходной последовательности зондирующих радиоимпульсов, приеме отраженных радиоимпульсов, сравнении с излученными по времени их следования, изменении частоты следования зондирующих радиоимпульсов исходной последовательности, определении момента совпадения во времени отраженных радиоимпульсов с последующими излученными исходными зондирующими...
Спосіб визначення швидкості сейсмічної хвилі
Номер патенту: 3525
Опубліковано: 27.12.1994
Автори: Головін Сергій Леонідович, Нєстєров Володимир Вікторович
МПК: G01V 1/00, G01V 1/28, G01V 1/16
Мітки: спосіб, швидкості, сейсмічної, визначення, хвилі
Формула / Реферат:
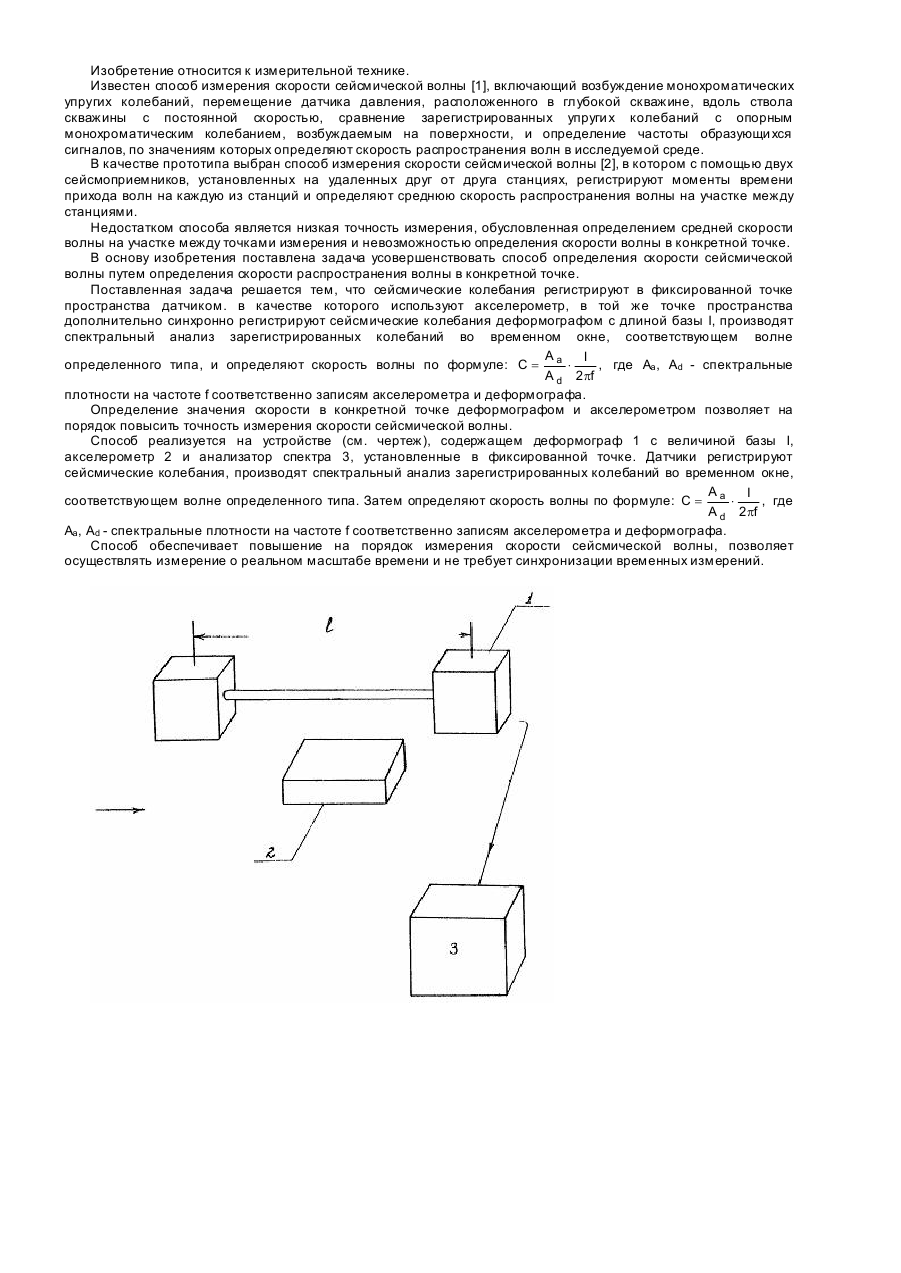
Способ определения скорости сейсмической волны путем регистрации сейсмических колебаний датчиком в фиксированной точке пространства, отличающийся тем, что в качестве датчика используют акселерометр, дополнительно синхронно регистрируют в той же точке сейсмические колебания деформографом с длиной базы I, производят спектральный анализ зарегистрированных колебаний во временном окне, соответствующем волне определенного типа, и определяют...
Спосіб визначення нижнього порогового значення коефіцієнта інтенсивності напружень
Номер патенту: 2913
Опубліковано: 26.12.1994
Автори: Лисак Микола Васильович, Сергієнко Олег Миколайович, Скальський Валентин Романович, Андрейків Олександр Євгенович
МПК: B23P 25/00, G01N 17/00
Мітки: спосіб, коефіцієнта, нижнього, значення, інтенсивності, порогового, напружень, визначення
Формула / Реферат:
Способ определения нижнего порогового значения коэффициента интенсивности напряжений kiscc высокопрочных сталей в коррозионных средах, по которому используют образцы из исследуемого материала, один из образцов нагружают постоянной нагрузкой до увеличения трещины на длину, превышающую зону пластической деформации у вершины трещины, затем снижают нагрузку до прекращения роста трещины, определяют усилие, при котором трещина прекращает рост,...
Спосіб визначення відносної кутової швидкості під час коливального процесу керування орієнтаціею об’єкту на рухомий орієнтир
Номер патенту: 3990
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: коливального, орієнтаціею, орієнтир, швидкості, визначення, керування, спосіб, кутової, відносної, об'єкту, процесу, рухомий
Формула / Реферат:
1. Способ определения относительной угловой скорости при колебательном процессе управления ориентацией объекта на подвижным ориентир, включающий измерение углового отклонения ориентируемой оси от направления на ориентир, приложение к ориентируемому объекту управляющего воздействия, сформированного в функции измеренного отклонения, при помощи электромаховичных двигателей (ЭМД), измерение скорости вращения маховиков ЭМД, отличающийся тем, что...
Попередній патент: Стенд для приймально-здавальних випробувань регулятора тиску
Наступний патент: Станок для висвердлювання дефектів деревини і забивання отворів
Випадковий патент: Композиція інгредієнтів для настоянки "абсент голд"