Спосіб визначення дальності
Номер патенту: 3056
Опубліковано: 26.12.1994
Автори: Квашньов Юрій Олександрович, Глазков Леонід Олександрович, Скрипник Юрій Олексійович
Формула / Реферат
Способ определения дальности, основанный на излучении в сторону контролируемого объекта исходной последовательности зондирующих радиоимпульсов, приеме отраженных радиоимпульсов, сравнении с излученными по времени их следования, изменении частоты следования зондирующих радиоимпульсов исходной последовательности, определении момента совпадения во времени отраженных радиоимпульсов с последующими излученными исходными зондирующими радиоимпульсами, измерении частоты следования совпадающих радиоимпульсов и определении дальности, отличающийcя тем, что при излучении зондирующих радиоимпульсов увеличивают частоту следования исходных зондирующих радиоимпульсов до значения f1, при котором достигается стабильность результатов сравнения принятых и излученных радиоимпульсов, затем изменяют частоту следования радиоимпульсов до достижения совпадения принятых радиоимпульсов с ближайшими исходными зондирующими радиоимпульсами, измеряют частоту f2 следования совпадающих радиоимпульсов, определяют период T2 следования этих радиоимпульсов, задерживают принятые зондирующие радиоимпульсы на время ![]() меньшее величины полупериода следования исходных зондирующих радиоимпульсов
меньшее величины полупериода следования исходных зондирующих радиоимпульсов ![]() уменьшают частоту следования исходных радиоимпульсов до момента совпадения задержанных принятых радиоимпульсов с радиоимпульсами исходной зондирующей последовательности, измеряют значение соответствующей частоты f3 и определяют значение дальности из выражений.
уменьшают частоту следования исходных радиоимпульсов до момента совпадения задержанных принятых радиоимпульсов с радиоимпульсами исходной зондирующей последовательности, измеряют значение соответствующей частоты f3 и определяют значение дальности из выражений.
![]()
где R1 и R2 - соответственно дальность объекта до передающего и приемного пункта при разнесенных излучающей и приемной антеннах, R - дальность объекта при совмещении передающей и приемной антенн, v - скорость распространения радиоволн в атмосфере.
Текст
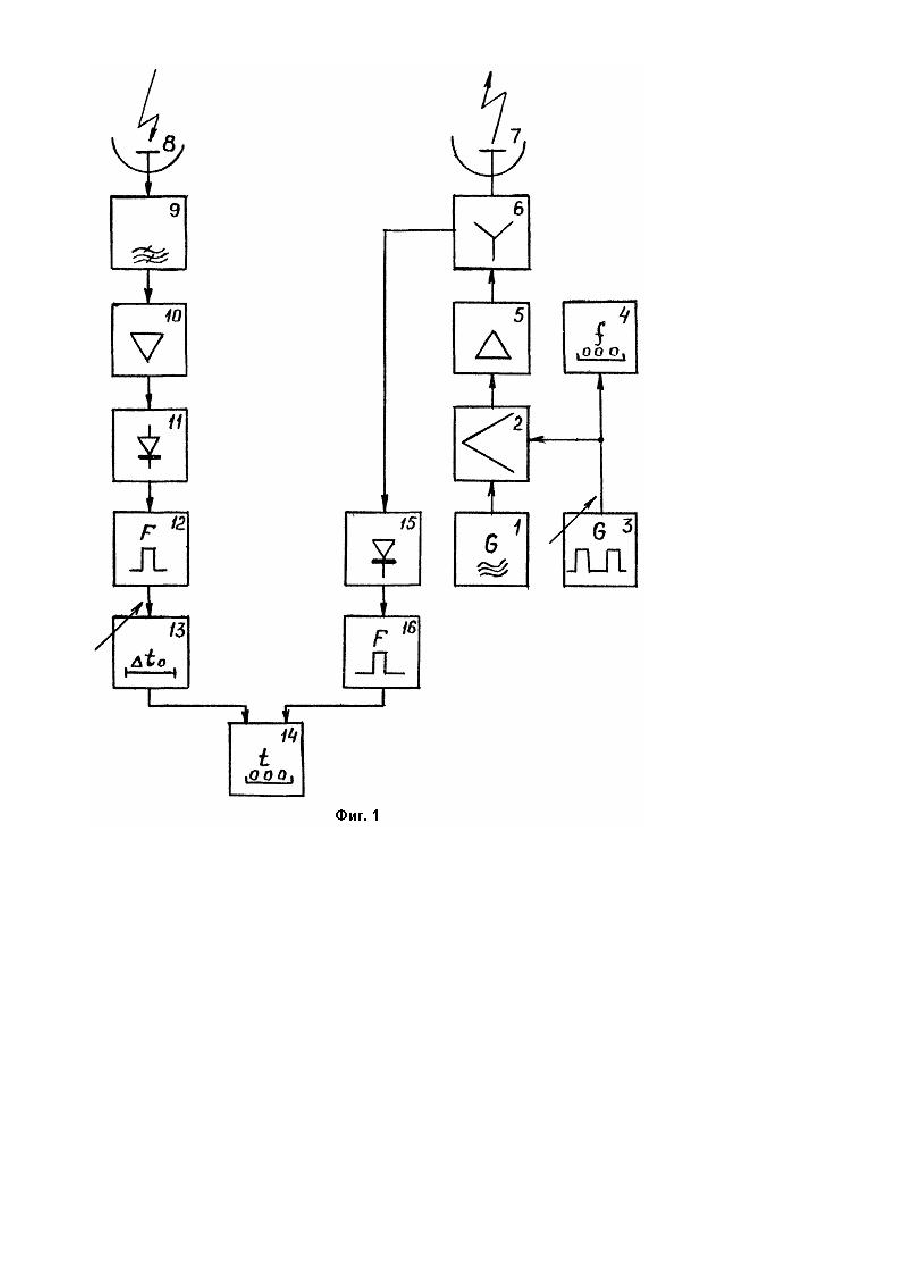
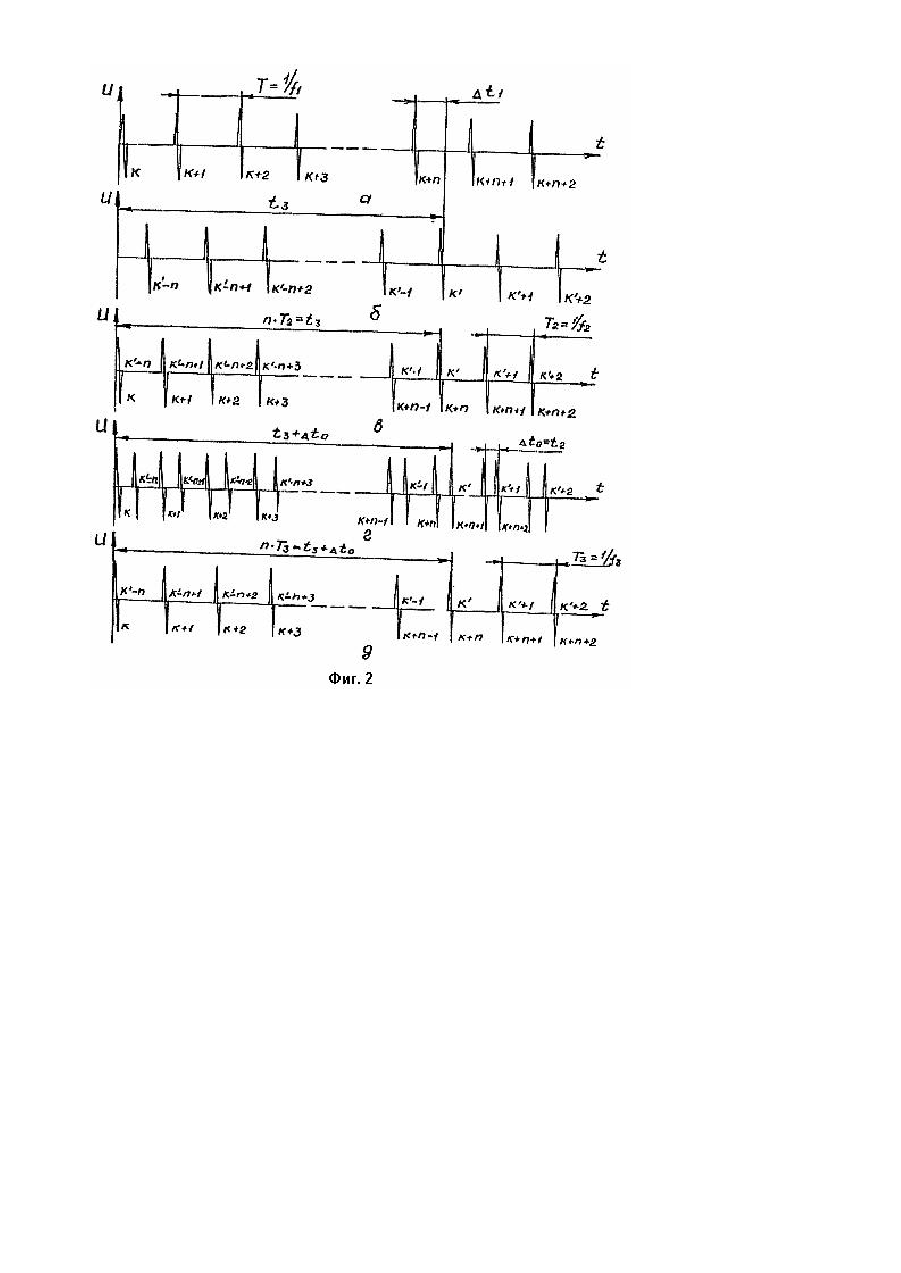
Изобретение относится к области радиолокации и может быть использовано для определения дальности малоподвижных объектов путем измерения времени запаздывания между излученными и принятыми зондирующими импульсными сигналами. Известен компенсационный способ с переменной частотой следования радиоимпульсов, основанный на излучении в сторону контролируемого объекта исходной последовательности зондирующих радиоимпульсов, приеме отраженных радиоимпульсов, сравнении их с излученными, по времени следования, изменении частоты следования радиоимпульсов исходной последовательности до получения периода следования, равного интервалу времени между моментом передачи очередного исходного радиоимпульса и моментом приема отраженного предшествующего радиоимпульса, и определении дальности по формуле v v R = Tп = , 2 2fп где R - дальность контролируемого объекта до приемо-излучающей антенны; v - скорость распространения радиоволн в атмосфере; Тп и fn - соответственно период и частота следования радиоимпульсов в момент совпадения. Если расстояние до контролируемого объекта заранее не известно хотя бы приблизительно, то возможна ситуация, при которой отраженный зондирующий импульс при изменении частоты следования импульсов совпадет не с предшествующим исходным импульсом, а с более поздним. В этом случае действительное запаздывание сигнала до объекта. tз.д. = nТ, где n - количество излученных импульсов между исходным зондирующим и совпадающим по времени отраженным импульсом. В результате неопределенности в количестве импульсов, между которыми фиксируется совпадение, возникает большая ошибка в определении дальности. При больших расстояниях из-за влияния помех наблюдается нестабильность в индикации совпадения импульсов по времени, которую можно устранить повышением частоты следования зондирующих сигналов. Однако это может привести к еще большей неоднозначности измерений. В основу настоящего изобретения положена задача разработать способ определения дальности, в котором устранялась бы неоднозначность в измерении частоты совпадающих радиоимпульсов при высокой частоте их следования, что позволит повысить точность определения дальности до удаленных малоподвижных объектов. Поставленная задача достигается тем, что в способ определения дальности, основанный на излучении в сторону контролируемого объекта исходной последовательности зондирующих радиоимпульсов, приеме отраженных радиоимпульсов, сравнении с излученными по времени их следования, изменении частоты следования зондирующи х радиоимпульсов исходной последовательности, определении момента совпадения во времени отраженных радиоимпульсов с последующими излученными исходными зондирующими радиоимпульсами, измерении частоты следования совпадающих радиоимпульсов и определении дальности, согласно изобретению, при излучении зондирующи х радиоимпульсов: увеличивают частоту следования исходных зондирующи х радиоимпульсов до значения f1, при котором достигается стабильность результатов сравнения принятых и излученных радиоимпульсов, затем изменяют частоту следования радиоимпульсов до достижения совпадения принятых радиоимпульсов с ближайшими исходными зондирующими радиоимпульсами, измеряют частоту f2 следования совпадающих радиоимлульсов, определяют период Т2 следования этих радиоимпульсов, задерживают принятые зондирующие радиоимпульсы на время Dt o , меньшее величины T2 ), уменьшают частоту следования исходных радиоимпульсов 2 до момента совпадения дополнительно задержанных принятых радиоимпульсов с радиоимпульсами исходной зондирующей последовательности, измеряют значение соответствующей частоты f3, дальность определяют из выражений: f × Dt o R1 + R2 = 3 × v, f2 - f3 полупериода следования радиоимпульсов (D to < f3 × Dt o × v, 2(f2 - f3 ) где R1 и R2 - соответственно дальность объекта до передающего и приемного пунктов при разнесенных излучающей и приемной антеннах, R - дальность объекта при совмещении передающей и приемной антенн, v скорость распространения радиоволн в атмосфере. На фиг.1 представлена структурная схема устройства, реализующего способ определения дальности, на фиг.2 - эпюры исходных зондирующи х и отраженных зондирующих импульсов, поясняющие способ. Устройство содержит СВЧ генератор 1, соединенный с импульсным модулятором 2, управляющий вход которого подключен к импульсному генератору 3 регулируемой частоты и цифровому частотомеру 4. Выход модулятора через усилитель 5 мощности и делитель мощности 6 соединен с передающей антенной 7. Приемная антенна 8 через полосовой фильтр 9 и усилитель мощности 10 соединена с СВЧ детектором 11, выход которого через формирователь импульсов 12 и регулируемую линию задержки 13 соединен с одним входом цифрового измерителя временных интервалов (ИВИ) 14. Второй выход делителя 6 мощности через СВЧ детектор 15 и формирователь импульсов 16 соединен со вторым входом ИВИ 14. Определение дальности до малоподвижного объекта производится в следующей последовательности. Сверхвысокочастотные колебания (СВЧ) генератора 1 подвергаются импульсной модуляции в модуляторе 2, на управляющий вход которого поступают короткие импульсы, от генератора 3, частота следования которых измеряется частотомером 4. Последовательность радиоимпульсов с частотой f следования усиливается R= усилителем 5 мощности и излучается передающей антенной 7 в направлении контролируемого объекта (на фиг. 1 не показан) в качестве зондирующего сигнала. Принятые антенной 8 отраженные от объекта радиоимпульсы проходят через полосовой фильтр 9, усиливаются по мощности усилителем 10 и детектируются СВЧ детектором II. Короткие импульсы с формирователя 12 с частотой f следования поступают на один вход измерителя временных интервалов (ИВИ) 14. На другой вход ИВИ поступают опорные импульсы с выхода формирователя 16, полученные из исходных зондирующи х радиоимпульсов, которые поступают на СВЧ детектор 15 со второго выхода делителя мощности 6. Вначале устанавливают на выходе генератора 3 частоту f1 следования импульсов такой, чтобы нестабильность показаний по цифровому индикатору ИВИ 14 не превышала единицу младшего разряда. Последнее достигается постепенным увеличением частоты следования импульсов генератора 3. При установленной частоте f1 передающей антенной 7 излучается последовательность исходных радиоимпульсов К, К+1, K+2,..., К+n , К+n+1 (фиг. 2,а), которые одновременно в виде опорных импульсов поступают на один из входов ИВИ 14. Отраженные зондирующие радиоимпульсы К, К+1, К+2,.., (фиг. 2,б), запаздывающие на время tз, поступают на другой вход ИВИ 14. Если приемная и передающая антенны разнесены в пространстве, то время запаздывания tз, отраженного сигнала относительно зондирующего определяется соотношением tз = (R1 + R2 ) × v, (1) где R1 и R2 - соответственно расстояния от объекта до передающего и приемного пунктов; v - скорость распространения радиоволн в атмосфере. При совмещении передающей и приемной антенн время запаздывания отраженного сигнала 2R tз = . ( 2) v Сравнивают с помощью ИВИ 14 временное положение импульсов, фиксируя временной интервал между ближайшими по времени импульсами. Так, временной интервал между принятым К импульсом (фиг. 2,б) и ближайшим по времени исходным импульсом К+n (фиг. 2,а) определяется выражением Dt1 = t з - nTn, (3) где Tn - период следования радиоимпульсов; n - количество излученных импульсов между моментом приема отраженного и предшествующим моментом излучения этого же импульса. Затем плавно изменяют частоту следования радиоимпульсов до значения f2, при котором наблюдается совпадение ближайших отраженных и исходных импульсов (фи г. 2,в) n tз = nT2 = ( 4) f2 Измеряют частоту f 2 следования импульсов частотомером 4 и определяют период следования импульсов T2=I/f2 . Дополнительно задерживают принятые импульсы с помощью линии задержки 13 на время, которое превышает порог чувстви тельности ИВИ, но меньше полупериода следования импульсов (фиг. 2,г) T Dt 2 = t з + Dt o - nT2 >Tn, повышает точность определения дальности за счет повышения частоты следования зондирующих импульсов, когда не известно даже приблизительно расстояние до контролируемого объекта. Возможности предлагаемого способа иллюстрируются следующим расчетом дальности по результатам измерений. При определении дальности до объекта, находящегося на расстоянии до 2-3 тыс. км, частоту следования радиоимпульсов с мощностью в импульсе 1000 кВт для обеспечения соотношения сигнал/шум больше единицы следует выбирать в диапазоне 100-1000 Гц, когда обеспечивается стабильная работа цифрового измерителя временных интервалов. Если первоначальную частоту следования радиоимпульсов выбрать f1 = 1000 Гц, то отраженный радиоимпульс, из соотношения (2), запаздывает на время 2R tз = v при дальности 2 тыс. км t¢ = з 2,2 × 103 3 ×105 = 13,3 × 10-3 c, 2 × 2,5 × 103 = 16,6 × 10- 3 c, 3 × 105 что близко к совпадению с 13 или 17 импульсами. Если объект находится на расстоянии 2200 км, то время запаздывания равно при дальности 2,5 тыс. км t¢¢ = з 2 × 2,2 × 103 = 14,66 × 10- 3 c. 3 × 105 Изменением частоты следования радиоимпульсов добиваются совпадения отраженного радиоимпульса с ближайшим 15 импульсом. Тогда частота следования f2 будет равна n 15 f2 = = = 1023 Гц. tз 14,66 × 10-3 Дополнительно задерживаем привитые радиоимпульсы на время, равное полупериоду следования радиоимпульсов I 1 Dt o = = = 0,488 × 10-3 c. 2f2 2 × 1023 Для восстановления совпадения радиоимпульсов частоту следования радиоимпульсов уменьшают до значения f2 1023 f3 = = = 990 Гц. D to 10332 , I+ tз Подставлял значение частоты следования f2 и f3 в формулу (II), получим дальность до объекта tз = f3 × Dt o 990 × 0,488 × 10-3 × 3 × 108 v= = 2196км 2( f2 - f3 ) 2(1023 - 990) Если, изменяя частоту следования радиоимпульсов, добиваются совпадения отраженного радиоимпульса с 14 импульсом, то: 14 f2 = = 995Гц. 14,66 × 10-3 1 Dt o = = 0,523 × 10-3 c. 1910 995 f3 = = 922Гц 1,0356 и дальность до объекта R= 922 × 0,523 × 10-3 × 3 × 10 8 = 2191км 66 Относительная сшибка определения дальности до удаленного объекта не превышает 0,2-0,3 % в условиях действия помех, Таким образом, возможность выбора начальной частоты следования зондирующих сигналов в присутствии помех по критерию достижения стабильной работы измерителя временных интервалов, т.е. достижения отношения сигнал/шум, больше единицы и последующая избыточность в измерении частоты следования зондирующи х сигналов за счет дополнительной задержки принятых сигналов позволяет полностью исключить неоднозначность отсчетов и тем самым существенно повысить точность определения дальности до удаленных объектов. R=
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of range
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Kvashniov Yurii Oleksandrovych, Hlazkov Leonid Oleksandrovych
Назва патенту російськоюСпособ определения дальности
Автори російськоюСкрипник Юрий Алексеевич, Квашнев Юрий Александрович, Глазков Леонид Александрович
МПК / Мітки
МПК: G01S 13/12
Мітки: визначення, дальності, спосіб
Код посилання
<a href="https://ua.patents.su/5-3056-sposib-viznachennya-dalnosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення дальності</a>
Спосіб визначення окремих значень амплітудно-фазової частотної характеристики всережимного відцентрового регулятора частоти обертання колінчатого вала тракторного дизельного двигуна
Номер патенту: 33
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/08
Мітки: частотної, амплітудно-фазової, частоти, спосіб, дизельного, відцентрового, визначення, колінчатого, тракторного, двигуна, обертання, регулятора, вала, характеристики, всережимного, окремих, значень
Формула / Реферат:
Формула изобретенияСпособ определения частных значений амплитудно-фазовой частотной характеристики всережимного центробежного регулятора частоты вращения коленчатого вала тракторного дизельного двигателя, характеризующийся тем, что задают частоту вращения валика регулятора, соединяют рычаг управления регулятора с имитатором гармонических колебаний и регистрируют колебания рычага управления и позирующего органа топливного насоса,...
Спосіб визначення гранулометричного складу матеріалів
Номер патенту: 147
Опубліковано: 30.04.1993
Автори: Первушин Сергій Іванович, Хорошілов Микола Макарович, Кубишкін Сергій Миколайович, Дорофєєв Володимир Миколайович, Новохатський Олександр Михайлович, Михайлюк Геннадій Дмитрович
МПК: G01N 29/00
Мітки: визначення, гранулометричного, спосіб, складу, матеріалів
Формула / Реферат:
Формула изобретенияСпособ определения гранулометрического состава материала, заключающийся в том, что исследуемый материал прозвучивают на двух частотах f1 и f2 и измеряют параметры принятых звуковых сигналов, по которым судят в среднем диаметре гранул, отличающийся тем, что, с целью повышения точности и информативности за счет определения также и коэффициента вариации гранул, частоты f1 и f2 сигналов прозвучивания выбирают из...
Спосіб визначення оптимальної температури нагріву під загартування титанових сплавів
Номер патенту: 1306
Опубліковано: 25.03.1994
Автори: Ошкадьоров Станіслав Петрович, Івасишин Орест Михайлович, Марковський Павло Євгенович, Гріднев Віталій Никифорович, Теруков Андрій Вікторович
МПК: C22F 1/18
Мітки: спосіб, визначення, оптимальної, температури, загартування, сплавів, нагріву, титанових
Формула / Реферат:
Способ определения оптимальной температуры нагрева под закалку титановых сплавов, включающий измерение температуры полиморфного превращения закаливаемого сплава и выбор тсмпературы закалки в зависимости от температуры полиморфного превращения и скорости нагрета, отличающийся тем, что, с целью повышения достоверности определения за счет уменьшения разброса свойств, дополнительно определяют сруктурный параметр а, равный средней толщине частин...
Спосіб визначення окремих значень амплітудно-фазової частотної характеристики автотракторного дизельного двигуна
Номер патенту: 34
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/08
Мітки: спосіб, окремих, автотракторного, дизельного, двигуна, визначення, характеристики, значень, частотної, амплітудно-фазової
Формула / Реферат:
(57) СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТНЫХ ЗНАЧЕНИЙ АМПЛИТУДНО-ФАЗОВОЙ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ АВТОТРАКТОРНОГО ДИЗЕЛЬНОГО ДВИГАТЕЛЯ путем запуска двигателя с последующим прогревом, задания .частоты вращения коленчатого вала, отсоединения дозирующего органа топливного насоса от рычага управления регулятора, соединения дозирующего органа с имитатором гармонических колебаний.и регистрации колебаний . имитатора, отличающийся тем, что, с целью повышения...
Пристрій для визначення вектора дісбалансу
Номер патенту: 1158
Опубліковано: 30.12.1993
Автори: Меншиков Сергій Миколайович, Квашин Михайло Федорович, Цибулько Вадим Йосипович, Грязєв Генадій Васильович
МПК: G01M 1/22
Мітки: пристрій, дисбалансу, вектора, визначення
Формула / Реферат:
(57) 1. Устройство для определения вектора дисбаланса, содержавшее последовательно соединенные датчик дисбаланса, синхронный детектор, выход которого предназначен для соединения с указателем величины дисбаланса, источник опорного напряжения, вход которого соединен с датчиком дисбаланса, и импульсную лампу, предназначенную для указания места дисбаланса на роторе, отличающееся тем, что, с целью повышения производительности балансировки,...