Спосіб підвищення ефективності розпізнавання підводних об’єктів
Формула / Реферат
Спосіб підвищення ефективності розпізнавання підводних об'єктів, який полягає в тому, що для підвищення ефективності розпізнавання підводних об'єктів аналізують контрастно-частотну характеристику гідросередовища, а також аналізують спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основі вихідних сигналів аналізаторів контрастно-частотної характеристики гідросередовища і миттєвого спектра передспотвореного сигналу формують керуючий сигнал для адаптивного регулювання АЧХ коректуючого фільтра, який відрізняється тим, що вимірюють спектральну характеристику гідросередовища, підсвічують підводний об'єкт світловим імпульсом дуже малої тривалості, причому, згідно зі значенням спектральної характеристики гідросередовища, регулюють режим тривалості імпульсів підсвічування, а також керують автоматичним вибором необхідних світлофільтрів до об'єктива телевізійної передавальної камери, при цьому, згідно зі значенням спектральної характеристики гідро середовища, адаптивно змінюють режим часового стробування переривника об'єктива передавальної трубки телевізійної камери так, щоб світло від підводного об'єкта потрапляло до фотокатода трубки тільки на момент повернення відбитого від підводного об'єкта імпульсу.
Текст
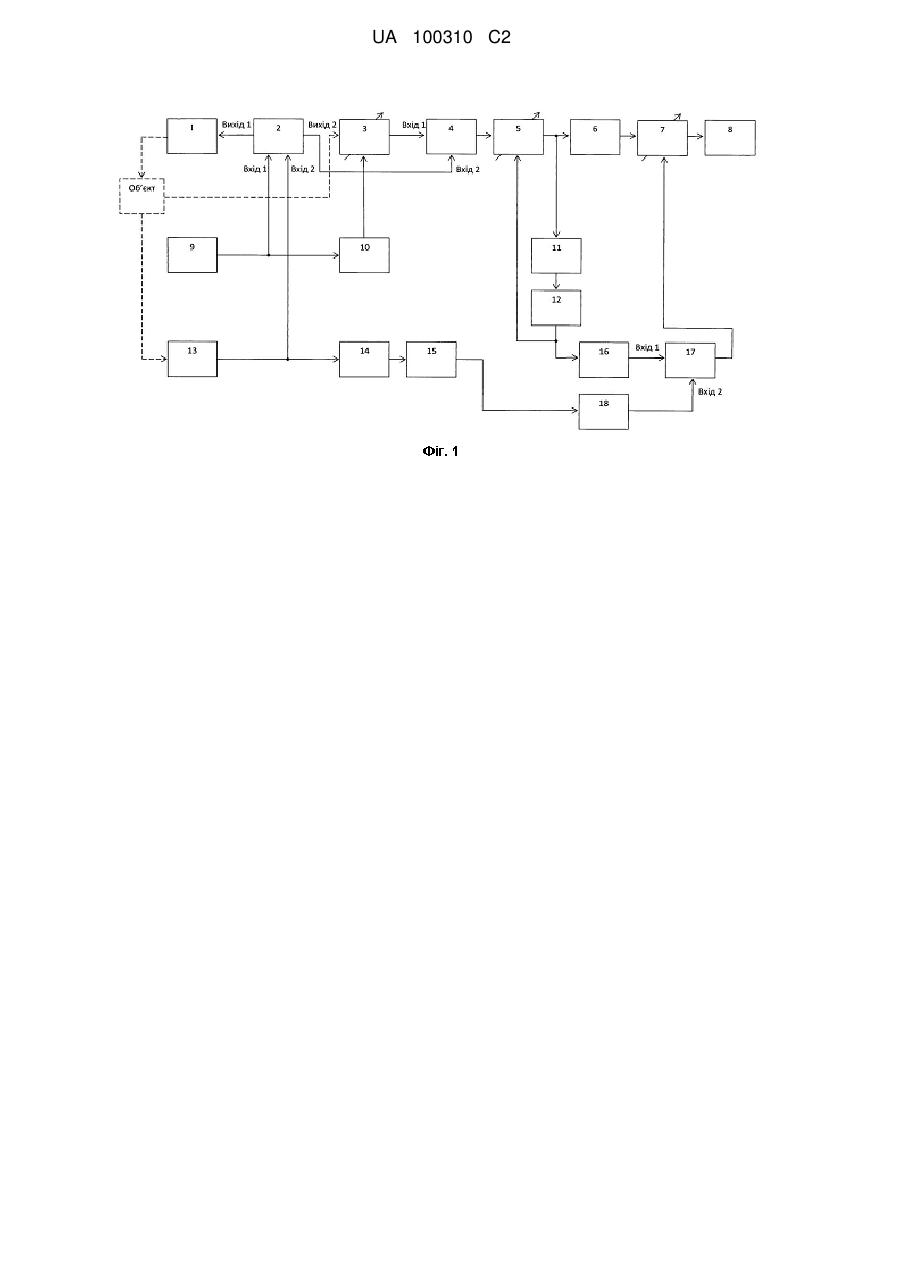
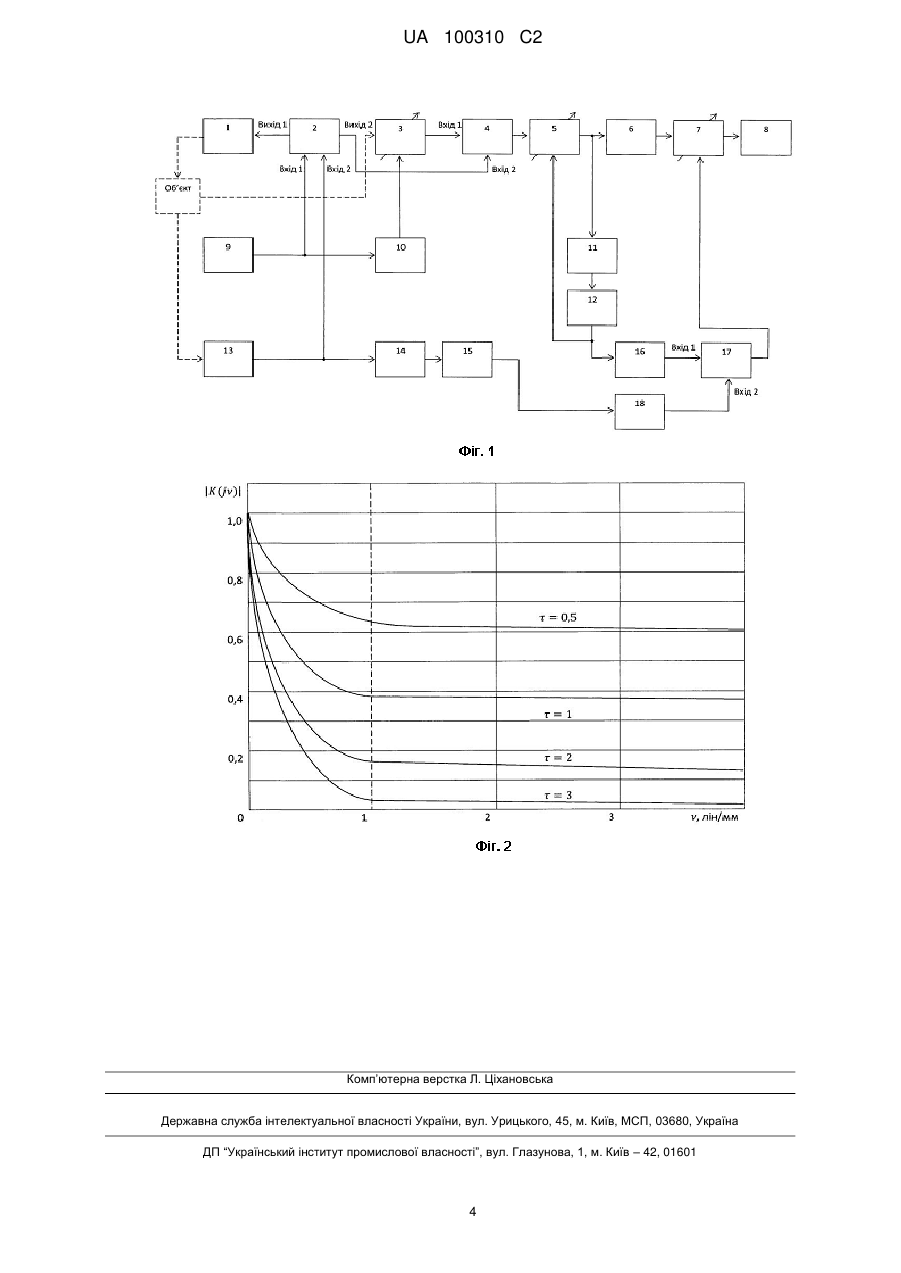
Реферат: Винахід призначений для підвищення ефективності розпізнавання підводних об'єктів у складних умовах стану гідросередовища. З метою підвищення ефективності розпізнавання підводних об'єктів вимірюють спектральну характеристику гідросередовища, підсвічують підводний об'єкт світловим імпульсом дуже малої тривалості, причому, згідно зі значенням спектральної характеристики гідросередовища, регулюють режим тривалості імпульсів підсвічування, а також керують автоматичним вибором необхідних світлофільтрів до об'єктива телевізійної передавальної камери, при цьом, згідно зі значенням спектральної характеристики гідросередовища, адаптивно змінюють режим часового стробування переривника об'єктива передавальної трубки телевізійної камери так, щоб світло від підводного об'єкта потрапляло до фотокатода трубки тільки на момент повернення відбитого від підводного об'єкта імпульсу. Техніко-економічна ефективність запропонованого способу полягає у виграші у величині АЧХ гідросередовища 23,8 дБ, що рівнозначно збільшенню у стільки ж разів коефіцієнта підсилення телевізійної камери. UA 100310 C2 (12) UA 100310 C2 UA 100310 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід призначений для підвищення ефективності розпізнавання підводних об'єктів у складних умовах стану гідросередовища. Відомі аналогічні способи і пристрої розпізнавання підводних об'єктів, в яких для підвищення ефективності розпізнавання підводних об'єктів застосовується вимірювання контрастночастотної характеристики гідросередовища, а також передспотворення сигналу зображення при передачі та адаптивна корекція передспотвореного сигналу в приймальному тракті телевізійної системи [А.с. СРСР 327615, МКИ НО4 N9/84, 1970; А.с. СРСР 720731, МКИ НО4В1/62, НО4 N5/38, 05.03.1980; А.с. СРСР 268566, МКИ НО4В1/62, 1970; Пат. 4255800 США, МКИ GO1S15/06, 10.03.1980; Пат. 93126 Україна, МПК G01V3/11, В63С7/26, 10.01.2011]. Найбільш близьким за технічною суттю до способу, який заявляється, є вибраний як прототип спосіб розпізнавання підводних об'єктів [Пат. 93126 Україна, МПК G01V3/11; В63С 7/26, 10.01.2011], який полягає в тому, що заздалегідь визначають порогове значення сигналу з виходу магнітометричного датчика щодо певного класу підводних об'єктів, причому у випадку розпізнавання об'єкта вихідним сигналом блока визначення порога керують блоком комутації; за допомогою якого підключають до інформаційного входу передспотворюючого фільтра смуговий фільтр низькочастотної частини відеоспектра сигналу зображення і розпізнають на приймачі сигналу зображення загальний вигляд підводного об'єкта, після чого за допомогою блока комутації підключають до входу передспотворюючого фільтра смуговий фільтр високочастотної частини відеоспектра сигналу зображення і розпізнають на приймачі сигналу зображення дрібні деталі об'єкта, а також визначають характер його пошкоджень. Недоліки цього способу, а також вказаних аналогів полягають у наступному: у випадку достатньо великої глибини, на якій знаходиться підводний об'єкт, а також великої мутності гідросередовища навіть при достатньо потужному джерелі підсвічування об'єкта телевізійна камера матиме низьку чутливість, що обумовлено процесами розсіяння та поглинання світла у гідросередовищі; у прототипі під час неперервної роботи джерела підсвічування виникають достатньо великі затрати енергії; при великій глибині розташування підводного об'єкта магнітометричний датчик буде неспроможним розпізнати об'єкт, при цьому телевізійна система не зможе нормально працювати у режимі розпізнавання; у прототипі не реалізовано такий режим роботи, при якому спектральна характеристика фотокатода передавальної камери телевізійної системи узгоджується зі змінами частотноконтрастної характеристики гідросередовища; у прототипі не передбачена адаптація об'єктива телевізійної камери до змінних умов освітлення підводних об'єктів, що призводить до значного зниження ефективності розпізнавання. Таким чином, прототип запропонованого винаходу в складних умовах, що виникають при великому ступені мутності гідросередовища та при достатньо великій глибині знаходження підводного об'єкта, має низьку ефективність пошуку і розпізнавання. В основу винаходу поставлена задача підвищення ефективності розпізнавання підводних об'єктів шляхом введення імпульсного підсвічування об'єкта, режим якого адаптується щодо спектральної характеристики гідросередовища та його контрастно-частотної характеристики. Крім того, згідно зі значенням спектральної характеристики гідро середовища, регулюють режим тривалості імпульсів підсвічування, керують автоматичним режимом вибору світофільтрів, а також режимом часового стробування фотокатода передавальної трубки телевізійної камери таким чином, щоб світло від об'єкта потрапляло до фотокатода трубки тільки на момент повернення відбитого (віддзеркаленого) імпульсу. Розв'язання цієї технічної задачі здійснюється тим, що згідно зі способом, який полягає в тому, що для підвищення ефективності розпізнавання підводних об'єктів аналізують контрастночастотну характеристику гідросередовища, а також аналізують спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основі вихідних сигналів аналізаторів контрастно-частотної характеристики гідросередовища і миттєвого спектра передспотвореного сигналу формують керуючий сигнал для адаптивного регулювання АЧХ коректуючого фільтра, згідно з винаходом, вимірюють спектральну характеристику гідросередовища, підсвічують підводний об'єкт світловим імпульсом дуже малої тривалості, причому, згідно зі значенням спектральної характеристики гідросередовища, регулюють режим тривалості імпульсів підсвічування, а також керують автоматичним вибором необхідних світлофільтрів до об'єктива телевізійної передавальної камери, при цьому, згідно зі значенням спектральної характеристики гідросередовища, адаптивно змінюють режим часового стробування переривника об'єктива 1 UA 100310 C2 5 10 15 20 25 30 35 40 45 50 55 60 передавальної трубки телевізійної камери так, щоб світло від підводного об'єкта потрапляло до фотокатода трубки тільки на момент повернення відбитого від підводного об'єкта імпульсу. При порівнянні з прототипом запропонований спосіб забезпечує більшу ефективність розпізнавання підводних об'єктів за рахунок того, що при великій мутності гідросередовища і достатньо великій глибині розташування шуканого об'єкта тільки імпульсний режим роботи джерела освітлення та зміна світлофільтрів для узгодження спектральної характеристики гідросередовища зі спектральною чутливістю фотокатода передавальної телевізійної трубки можуть вирішити задачу розпізнавання об'єктів. Крім того, при часовому стробуванні переривника об'єктива камери таким чином, щоб світло від підводного об'єкта потрапляло до фотокатода передавальної трубки тільки на момент повернення відбитого від об'єкта імпульсу, можна компенсувати спотворення зображення об'єкта за рахунок впливу розсіяння світла та його поглинання в гідросередовищі. При імпульсному підсвічуванні підводного об'єкта можна також значно збільшити потужність джерела освітлення, чого принципово неможливо реалізувати в прототипі. Структурна схема системи розпізнавання, яка пояснює запропонований спосіб, зображена на фіг. 1. На фіг. 2 наведена залежність АЧХ гідросередовища від просторової частоти при різних значеннях оптичної дальності спостереження. Схема (фіг. 1) містить в собі: послідовно сполучені джерело імпульсного підсвічування об'єкта 1, другий блок керування 2, блок автоматичного вибору світлофільтрів 3, телевізійну передавальну камеру 4, передспотворюючий фільтр 5, канал зв'язку (коаксіальний кабель-трос) 6, коректуючий фільтр 7 і приймач зображення 8, а також блок вимірювання спектральної характеристики гідросередовища 9, третій блок керування 10, аналізатор миттєвого спектра передспотвореного сигналу 11, четвертий блок керування 12, блок вимірювання контрастно-частотної характеристики гідросередовища 13, аналізатор контрастно-частотної характеристики гідросередовища 14, перший блок керування 15, перший канал керування 16, блок віднімання 17 і другий канал керування 18. Схема, зображена на фіг. 1, працює таким чином. Блок вимірювання спектральної характеристики гідросередовища 9 вимірює цю характеристику і на його виході формується керуючий сигнал, який подається на перший вхід (Вхід 1) другого блока керування 2, а також через третій блок керування 10 - до входу блока автоматичного вибору світлофільтрів 3. Одночасно вихідний сигнал з блока вимірювання контрастно-частотної характеристики гідросередовища 13 подається до другого входу (Вхід 2) другого блока керування 2, а також до входу аналізатора контрастно-частотної характеристики гідросередовища 14. З першого виходу (Вихід 1) блока 2 керуючий сигнал, який містить в собі інформацію щодо виміряних спектральної та контрастно-частотної характеристик гідросередовища, надходить до керуючого входу джерела імпульсного підсвічування об'єкта 1. Останній формує такий режим, при якому підводний об'єкт освітлюється імпульсами короткочасної тривалості, а тривалість імпульсів залежить від стану спектральної та контрастно-частотної характеристик гідросередовища. З другого виходу (Вихід 2) другого блока керування 2 керуючий сигнал подається до другого входу (Вхід 2) керуючого входу телевізійної передавальної камери 4, на перший вхід якої (Вхід 1) надходить керуючий сигнал з виходу блока автоматичного вибору світлофільтрів 3. Телевізійна камера функціонує в такому режимі, який є необхідним для узгодження як зі спектральною, так і з контрастно-частотною характеристиками гідросередовища. При цьому відбувається часове стробування переривника об'єктива телевізійної камери так, щоб світло від підводного об'єкта потрапляло до фотокатода передавальної трубки тільки на час повернення відбитого від об'єкта імпульсу. Таким чином, телевізійна камера адаптується не тільки до характеристик гідросередовища, а й до відбитого (віддзеркаленого) від об'єкта імпульсу світла. Останнє забезпечує змогу розпізнавання підводних об'єктів в умовах шкідливого впливу процесів розсіяння та поглинання світла в гідросередовищі. З виходу телевізійної камери 4 відеосигнал подається до інформаційного входу передспотворюючого фільтра 5, а з його виходу через канал зв'язку 6 - до інформаційного входу коректуючого фільтра 7. З виходу останнього інформаційний сигнал надходить до входу приймача зображення 8. Оптимально передспотворений сигнал з виходу адаптивного передспотворюючого фільтра 5 подається до входу аналізатора миттєвого спектра передспотвореного сигналу 11, а з його виходу керуючий сигнал через четвертий блок керування 12 і перший канал керування 16 подається на перший вхід (Вхід 1) блока віднімання 17, на другий вхід якого (Вхід 2) надходить через перший блок керування 15 і другий канал керування 18 керуючий сигнал з виходу аналізатора контрастно-частотної характеристики гідросередовища 14. Блок віднімання 17 призначений для того, щоб на його виході формувався керуючий сигнал для адаптивного регулювання АЧХ коректуючого фільтра 7, який не тільки 2 UA 100310 C2 5 10 15 20 25 відтворює сигнал на вході передспотворюючого фільтра, а й компенсує в ньому спотворення, що обумовлені неідеальністю контрастно-частотної характеристики гідросередовища. Керуючий сигнал з виходу четвертого блока керування 12 подається на керуючий вхід передспотворюючого фільтра 5 для адаптивного регулювання його АЧХ. З виходу блока віднімання 17 керуючий сигнал надходить до керуючого входу коректуючого фільтра 7. Запропонований спосіб забезпечує більшу ефективність розпізнавання підводних об'єктів при порівнянні з прототипом завдяки тому, що в ньому телевізійна камера адаптується до спектральної та контрастно-частотної характеристик гідросередовища, а також до імпульсного режиму функціонування джерела імпульсного підсвічування об'єкта та зміні режиму часового стробування об'єктива камери в залежності від мутності гідросередовища. Наведемо розрахунок виграшу в ефективності розпізнавання, який може бути одержаний від використання запропонованого способу. Мутне середовище, в якому відбуваються фізичні процеси розсіювання та поглинання світла, можна моделювати просторовим фільтром нижніх частот з нестаціонарною контрастно-частотною характеристикою [Варфоломеев A. M., Маригодов В. К. Повышение эффективности светоинформационных систем, работающих в мутных средах // Техника кино и телевидения.-1989. - № 3. - С. 22]. Там же зображена залежність АЧХ цієї моделі від просторової частоти при різних значеннях оптичної дальності -1 спостереження L , де - коефіцієнт розсіювання гідросередовища, м ; L - геометрична дальність до підводного об'єкта, м. Ця залежність зображена на фіг. 2. Аналіз графіків фіг. 2 свідчить про те, що спотворення АЧХ тим більші, чим більша оптична дальність . Вид графіків має такий характер, що при просторовій частоті 1 лінії/мм можна констатувати асимптотичну поведінку кривих. Відомо, що режим імпульсного підсвічування підводного об'єкта при порівнянні зі стаціонарним режимом джерела світла знижує оптичну дальність у 5-6 разів [Кондратьев А. Г., Лукин М. И. Техника промышленного телевидения. - Л.: Лениздат, 1970. - С. 112]. Звернемося до фіг. 2. Нехай при 1 і стаціонарному режимі підсвічування об'єкта, тобто для прототипу, маємо 3 . При цьому K j 0,04 (штрихова лінія на фіг. 2). Якщо в запропонованому способі оптична дальність зменшується у 6 разів, то при цьому маємо 0,5 і відповідно K j 0,62 . Таким чином, виграш у величині АЧХ (тобто у величині підсилення) 30 складає 0,62/0,04=15,5 або 23,8 дБ. Техніко-економічна ефективність запропонованого способу полягає у виграші у величині АЧХ гідросередовища 23,8 дБ, що рівнозначно збільшенню у стільки ж разів коефіцієнта підсилення відеотракту телевізійної камери. Це значно перевищує виграш, який має місце у прототипі і складає 1,13-6,3 дБ. 35 ФОРМУЛА ВИНАХОДУ 40 45 50 Спосіб підвищення ефективності розпізнавання підводних об'єктів, який полягає в тому, що для підвищення ефективності розпізнавання підводних об'єктів аналізують контрастно-частотну характеристику гідросередовища, а також аналізують спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основі вихідних сигналів аналізаторів контрастно-частотної характеристики гідросередовища і миттєвого спектра передспотвореного сигналу формують керуючий сигнал для адаптивного регулювання АЧХ коректуючого фільтра, який відрізняється тим, що вимірюють спектральну характеристику гідросередовища, підсвічують підводний об'єкт світловим імпульсом дуже малої тривалості, причому, згідно зі значенням спектральної характеристики гідросередовища, регулюють режим тривалості імпульсів підсвічування, а також керують автоматичним вибором необхідних світлофільтрів до об'єктива телевізійної передавальної камери, при цьому, згідно зі значенням спектральної характеристики гідросередовища, адаптивно змінюють режим часового стробування переривника об'єктива передавальної трубки телевізійної камери так, щоб світло від підводного об'єкта потрапляло до фотокатода трубки тільки на момент повернення відбитого від підводного об'єкта імпульсу. 3 UA 100310 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for increase of underwater objects identification effectiveness
Автори англійськоюMarihodov Volodymyr Kostiantynovych
Назва патенту російськоюСпособ повышения эффективности распознавания подводных объектов
Автори російськоюМаригодов Владимир Константинович
МПК / Мітки
Мітки: ефективності, підводних, об'єктів, розпізнавання, спосіб, підвищення
Код посилання
<a href="https://ua.patents.su/6-100310-sposib-pidvishhennya-efektivnosti-rozpiznavannya-pidvodnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення ефективності розпізнавання підводних об’єктів</a>
Спосіб розпізнавання підводних об’єктів

Номер патенту: 97224
Опубліковано: 10.01.2012
Автор: Марігодов Володимир Костянтинович
Мітки: об'єктів, підводних, спосіб, розпізнавання
Формула / Реферат:
Спосіб розпізнавання підводних об'єктів, який полягає в тому, що за допомогою оптичного датчика мутності гідросередовища вимірюють та аналізують частотно-контрастну характеристику гідросередовища, а також аналізують миттєвий спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основі вихідних сигналів аналізаторів частотно-контрастної характеристики гідросередовища і передспотвореного відеосигналу формують...
Спосіб розпізнавання підводних об’єктів

Номер патенту: 93126
Опубліковано: 10.01.2011
Автори: Кисельов Олексій Олександрович, Марігодов Володимир Костянтинович
Мітки: підводних, розпізнавання, спосіб, об'єктів
Формула / Реферат:
Спосіб розпізнавання підводних об'єктів, який полягає в тому, що аналізують частотно-контрастну характеристику гідросередовища, а також аналізують спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основні вихідних сигналів аналізаторів частотно-контрастної характеристики гідросередовища і передспотвореного відеосигналу формують керуючий сигнал для адаптивного регулювання АЧХ корегуючого фільтра, який...
Спосіб підвищення ефективності розробки підводних родовищ корисних копалин
Номер патенту: 89250
Опубліковано: 11.01.2010
Автори: Кириченко Євген Олексійович, Кириченко Володимир Євгенович, Шворак Віталій Григорович, Бешта Олександр Степанович, Євтєєв Володимир Васильович
МПК: E21C 45/00, F04F 1/00
Мітки: родовищ, підводних, корисних, копалин, розробки, спосіб, підвищення, ефективності
Формула / Реферат:
1. Спосіб підвищення ефективності розробки підводних родовищ корисних копалин, який включає підйом утворених компонентами підводних родовищ корисних копалин елементів гірничої маси в потоці транспортуючого середовища, що рухається в поставі транспортного трубопроводу, який відрізняється тим, що попередньо виконують геологічне дослідження підводних родовищ корисних копалин та задають величину робочої витрати первинно збагаченої гірничої маси...
Надшвидкісний засіб ураження надводних та підводних цілей
Номер патенту: 47374
Опубліковано: 25.01.2010
Автори: Бєляєв Сергій Юрійович, Даневич Володимир Феодосійович, Слєпов Лев Іванович, Блаженний Валерій Іванович
МПК: F42B 17/00
Мітки: цілей, підводних, надшвидкісний, засіб, ураження, надводних
Формула / Реферат:
Надшвидкісний засіб ураження надводних та підводних цілей, який містить корпус, основне сопло реактивної тяги, бойовий заряд, реактивний двигун, пристрій керування, який відрізняється тим, що додатково містить розподільчий пристрій та одне або більше додаткові сопла реактивної тяги, які розміщені в передній частині корпусу, під кутом до 45° від подовжньої осі в напрямку руху надшвидкісного засобу ураження надводних та підводних цілей.
Спосіб виявлення підводних об’єктів на морському рубежі або морській акваторії, що охороняється
Номер патенту: 80266
Опубліковано: 10.09.2007
Автори: Мнухін Анатолій Григорович, Амітан Веніамін Наумович, Киклевич Юрій Миколайович, Мнухін Владислав Анатолійович
МПК: G01S 15/00
Мітки: виявлення, охороняється, рубежі, об'єктів, морському, акваторії, спосіб, підводних, морській
Формула / Реферат:
Спосіб виявлення підводних об'єктів на морському рубежі або на морській акваторії, що охороняється, при якому з ряду точок з відомими координатами здійснюють ненаправлене випромінювання гідравлічних коливань у водяному масиві, яке приймають декількома приймачами, а про місце розташування об'єкта судять по координатах приймача, у якому реєструється зміна коливань, який відрізняється тим, що гідравлічні коливання здійснюють за допомогою...
Попередній патент: Свердловинна насосна установка
Наступний патент: Спосіб виконання вантажних операцій на контейнерному терміналі
Випадковий патент: Замінник молочного жиру "феттімілк 02ак" для харчового продукту, переважно морозива та глазурі до нього