Спосіб розпізнавання підводних об’єктів

Формула / Реферат
Спосіб розпізнавання підводних об'єктів, який полягає в тому, що за допомогою оптичного датчика мутності гідросередовища вимірюють та аналізують частотно-контрастну характеристику гідросередовища, а також аналізують миттєвий спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основі вихідних сигналів аналізаторів частотно-контрастної характеристики гідросередовища і передспотвореного відеосигналу формують керуючий сигнал для адаптивного регулювання АЧХ передспотворюючого і корегуючого фільтрів, який відрізняється тим, що формують базу зображень типових об'єктів, які необхідно розпізнавати, запам'ятовують еталонне зображення об'єкта, що розпізнається, ідентифікують шляхом порівняння з еталоном зображення підводного об'єкта, яке формується у приймачі інформації, приймають рішення щодо правильного розпізнавання підводного об'єкта на основі ідентифікації, а також подають сигнал зображення на блок відеоконтролю тільки у випадку правильного розпізнавання.
Текст
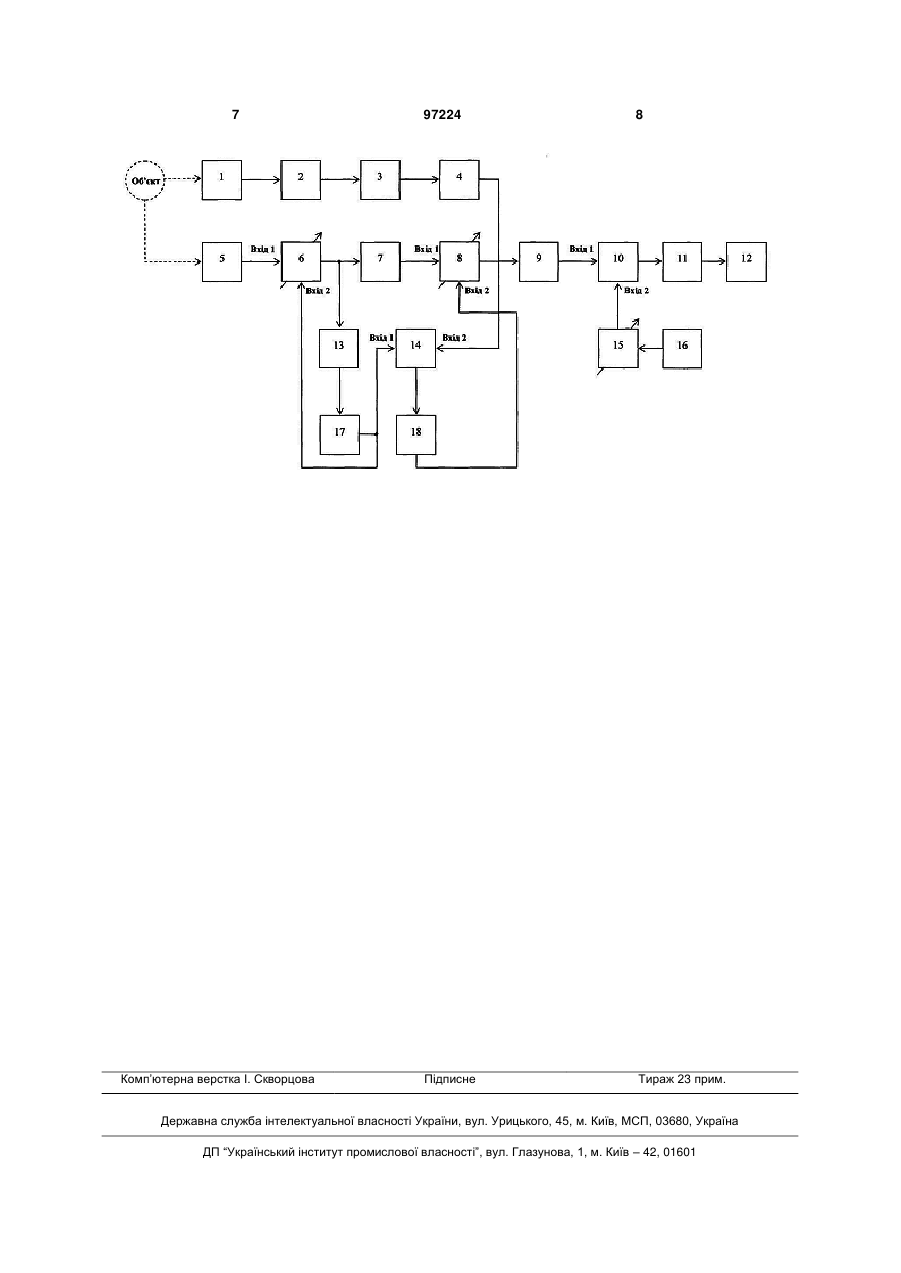
Спосіб розпізнавання підводних об'єктів, який полягає в тому, що за допомогою оптичного датчика мутності гідросередовища вимірюють та аналізують частотно-контрастну характеристику гідросередовища, а також аналізують миттєвий спектр 3 ком розшукати підводний об'єкт, а потім розпізнавати його за допомогою телевізійної системи; оскільки у прототипі магнітометричний датчик і телевізійна камера конструктивно розташовані на загальній платформі, це призводить до збільшення габаритів підводної частини системи, а також до значного зростання гідродинамічних вимог щодо кабелю-троса, на якому буксирується платформа. Таким чином, прототип запропонованого винаходу, як це випливає із вказаних вище недоліків, має низьку ефективність розпізнавання. В основу винаходу поставлена технічна задача підвищення ефективності розпізнавання підводних об'єктів шляхом введення можливості ідентифікації об'єкта, що розпізнається, на основі певного набору зображень типових об'єктів для порівняння з зображенням об'єкта, яке відтворюється у приймачі інформації. При цьому на екрані блока відеоконтролю спостерігається зображення шуканого об'єкта тільки у тому випадку, коли цей підводний об'єкт ідентифікований з еталонним його зображенням. Розв'язання цієї технічної задачі здійснюється тим, що згідно зі способом, який полягає в тому, що для підвищення ефективності розпізнавання підводних об'єктів за допомогою оптичного датчика каламутності гідросередовища вимірюють та аналізують частотно-контрастну характеристику гідросередовища, а також аналізують спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основі вихідних сигналів аналізаторів частотно-контрастної характеристики гідросередовища і передспотвореного відеосигналу формують керуючий сигнал для регулювання АЧХ передспотворюючого і корегуючого фільтрів, формують базу зображень типових об'єктів, які необхідно розпізнавати, запам'ятовують еталонне зображення об'єкта, що розпізнається, ідентифікують шляхом порівняння з еталоном зображення підводного об'єкта, яке формується у приймачі інформації, приймають рішення щодо правильного розпізнавання підводного об'єкта на основі ідентифікації, а також подають сигнал зображення на блок відеоконтролю тільки у випадку правильного розпізнавання. При порівнянні з прототипом запропонований спосіб забезпечує більшу ефективність розпізнавання підводних об'єктів завдяки тому, що зображення підводного об'єкта на екрані кінескопа блока відеоконтролю спостерігається тільки в тому разі, коли об'єкт ідентифіковано з його еталонним зображенням. У випадку відсутності останнього спостерігач (оператор телевізійної системи) повинен затратити достатньо великий час на розпізнавання за рахунок того, що в його пам'яті зберігається дуже велика кількість об'єктів, які мають «розмитий» характер і значно відрізняються від еталонного зображення об'єкта, що розпізнається. Структурна схема системи розпізнавання, яка пояснює запропонований спосіб, зображена на кресленні (Фіг.). Схема містить: оптичний датчик 1 каламутності гідросередовища, блок вимірювання частотно-контрастної характеристики гідросередовища 2, аналізатор частотно-контрастної характе 97224 4 ристики гідросередовища 3, перший блок керування 4, послідовно сполучені джерело сигналу (телевізійна камера) 5, адаптивний передспотворюючий фільтр 6, канал зв'язку (кабель-трос) 7, адаптивний корегуючий фільтр 8, приймач інформації 9, блок порівняння зображення з еталонним зображенням об'єкта 10, блок прийняття рішення 11, блок відеоконтролю 12, а також аналізатор миттєвого спектра передспотвореного сигналу 13, блок віднімання 14, блок запам'ятовування зображення еталонного об'єкта 15, блок бази зображень типових об'єктів 16, другий блок керування 17 і канал керування 18. Схема, зображена на кресленні, працює таким чином. Сигнал з виходу оптичного датчика каламутності гідросередовища 1 надходить до входу блока вимірювання частотно-контрастної характеристики гідросередовища 2. На основі вимірювання аналізатор частотно-контрастної характеристики гідросередовища 3 на своєму виході формує сигнал постійного струму, який через перший блок керування 4 подається до другого входу (Вхід 2) блока віднімання 14, на перший вхід якого (Вхід 1) надходить керуючий сигнал постійного струму з виходу другого блока керування 17. Цей сигнал формується на виході аналізатора миттєвого спектра передспотвореного сигналу 13. Одночасно керуючий сигнал з виходу другого блока керування подається до другого входу (Вхід 2) адаптивного передспотворюючого фільтра 6, на перший вхід якого (Вхід 1) надходить сигнал телевізійного зображення підводного об'єкта з виходу телевізійної камери 5. Для адаптивного регулювання АЧХ адаптивного корегуючого фільтра 8 використовується керуючий сигнал постійного струму, який формується на виході блока віднімання, і через канал керування 18 подається до другого (керуючого) входу (Вхід 2) фільтра 8, на перший (інформаційний) вхід якого (Вхід 1) надходить сигнал з виходу каналу зв'язку 7, а вхід останнього з'єднаний з виходом адаптивного передспотворюючого фільтра 6. Сигнал відтвореного зображення підводного об'єкта подається до входу приймача інформації 9, а з його виходу – до входу (Вхід 1) блока порівняння зображення з еталонним зображенням об'єкта 10, причому до другого входу (Вхід 2) останнього надходить сигнал еталонного зображення об'єкта з виходу блока запам'ятовування еталонного об'єкта 15, який формується із набору еталонних зображень блока бази зображень типових об'єктів 16. Прийняття рішень щодо ідентифікації зображення підводного об'єкта формується блоком прийняття рішення 11, на вхід якого подається сигнал з виходу блока порівняння зображення з еталонним зображенням об'єкта 10. У тому випадку, коли підводний об'єкт ідентифікований, сигнал зображення відтворюється на екрані кінескопа блока відеоконтролю 12. Це можна зробити, якщо на вхід блока прийняття рішення ввести ключовий каскад, який насичується (відкривається) тільки в тому випадку, коли завершився процес ідентифікації підводного об'єкта. Запропонований спосіб забезпечує більшу ефективність розпізнавання підводних об'єктів при порівнянні з прототипом завдяки тому, що в остан 5 ньому розпізнавання підводного об'єкта виконується безпосередньо спостерігачем (оператором системи) на екрані кінескопа телевізійної системи, а в запропонованому способі зображення об'єкта розпізнається за допомогою приладу (блоками порівняння зображення з еталонним зображенням об'єкта і прийняття рішень). Відомо, що імовірність правильного розпізнавання об'єкта спостерігачем в середньому на 2–3 % нижче імовірності правильного розпізнавання приладом [Красильников Н.Н. Теория передачи и восприятия изображений. – М.: Радио и связь, 1986. – С. 99]. Крім того, у прототипі відсутня апріорна інформація відносно об'єкта, який треба розпізнавати, а в запропонованому способі вона є (забезпечується блоками 15 і 16). При цьому відомо, що наявність апріорної інформації щодо об'єкта, який розпізнається,значно збільшує імовірність його правильного розпізнавання. Так, при відношенні середніх потужностей сигналу до шуму з урахуванням фільтрації в зоровій системі людини =8 імовірність правильного розпізнавання р=0,85 [Красильников Н.Н. Теория передачи и восприятия изображений. – М: Радио и связь, 1986. – С. 116]. Наведемо розрахунок виграшу в ефективності розпізнавання, який може бути одержаний від використання запропонованого способу. Для розрахунку виграшу проведемо порівняння середніх імовірностей правильного розпізнавання підводного об'єкта у випадку відсутності ансамблю еталонних зображень і при його наявності. При цьому доцільно розглядати сильно зашумлені зображення, для яких =8. При розпізнаванні об'єкта спостерігачем, який користується зображенням на екрані кінескопа блока відеоконтролю, потрібно мати справу із достатньо великим ансамблем зображень, що зберігаються у пам'яті спостерігача. У випадку наявності апріорної інформації щодо об'єкта, який розпізнається, ансамбль еталонних зображень 97224 6 значно зменшується, що повинно забезпечувати більш високу імовірність правильного розпізнавання. Нехай кількість зображень об'єкта, що зберігаються у пам'яті спостерігача, Nc=60, а кількість об'єктів, які сформовані блоком бази зображень типових об'єктів і блоком запам'ятовування зображення еталонного об'єкта, Ne=2. Це можна пояснити тим, що у даному випадку спостерігач заздалегідь знає, який із підводних об'єктів підлягає розпізнаванню. Середня імовірність правильного розпізнавання об'єкта визначається за виразом [Красильников Н.Н. Теория передачи и восприятия изображений. – М.: Радио и связь, 1986. –С. 113] p=0,5[1+Ф(Q1-Q0)], (1) де Ф(х) – інтеграл імовірності; Q1, Q2 – коефіцієнти, які визначаються із графіків рис. 2.6 [Красильников Н.Н. Теория передачи и восприятия изображений. – М.: Радио и связь, 1986. –С. 55]. Знаходимо середню імовірність правильного розпізнавання об'єкта p1 спостерігачем при Nc=60; Q0=2,16; Q1=0,65. За формулою (1)одержуємо p1=0,8. У випадку наявності апріорної інформації, тобто при Ne=2, знаходимо Q0=0; Q1=0,5; р2=0,92, де р2 – середня імовірність правильного розпізнавання об'єкта запропонованим способом. Виграш у ефективності правильного розпізнавання підводного об'єкта у знаходиться як відношення ймовірностей =p2/p1. (2) Використовуючи вираз (2), одержуємо =1,15 або 6 дБ. Техніко-економічна ефективність запропонованого способу полягає у збільшенні середньої імовірності правильного розпізнавання підводного об'єкта на 6 дБ. 7 Комп’ютерна верстка І. Скворцова 97224 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for recognition of underwater objects
Автори англійськоюMarihodov Volodymyr Kostiantynovych
Назва патенту російськоюСпособ распознавания подводных объектов
Автори російськоюМаригодов Владимир Константинович
МПК / Мітки
Мітки: підводних, спосіб, об'єктів, розпізнавання
Код посилання
<a href="https://ua.patents.su/4-97224-sposib-rozpiznavannya-pidvodnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання підводних об’єктів</a>
Спосіб розпізнавання підводних об’єктів

Номер патенту: 93126
Опубліковано: 10.01.2011
Автори: Кисельов Олексій Олександрович, Марігодов Володимир Костянтинович
Мітки: об'єктів, спосіб, підводних, розпізнавання
Формула / Реферат:
Спосіб розпізнавання підводних об'єктів, який полягає в тому, що аналізують частотно-контрастну характеристику гідросередовища, а також аналізують спектр відеосигналу на виході адаптивного передспотворюючого фільтра, при цьому на основні вихідних сигналів аналізаторів частотно-контрастної характеристики гідросередовища і передспотвореного відеосигналу формують керуючий сигнал для адаптивного регулювання АЧХ корегуючого фільтра, який...
Пристрій для розпізнавання геометричних об`єктів
Номер патенту: 48288
Опубліковано: 10.03.2010
Автори: Лехціер Олексій Олегович, Лехціер Леонід Романович, Шевченко Іван Володимирович
МПК: G06K 9/00
Мітки: геометричних, об'єктів, пристрій, розпізнавання
Формула / Реферат:
Пристрій для розпізнавання геометричних об'єктів, який містить датчик створення відеозображення об'єкта, блок формування матриць проекцій об'єкта, блок обчислення критерію близькості об'єктів і прийняття рішення, блок матриць проекцій еталонних об'єктів, який відрізняється тим, що пристрій забезпечено блоком розрахункового обертання зображення об'єкта та блоком зсуву досліджуваної матриці проекцій відносно еталонної, причому вхід і вихід...
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Остап Володимир Петрович, Русин Богдан Павлович, Остап Олег Петрович
МПК: G06K 9/68
Мітки: спосіб, зображень, розпізнавання
Формула / Реферат:
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Спосіб розпізнавання геометричних об`єктів
Номер патенту: 48287
Опубліковано: 10.03.2010
Автори: Лехціер Олег Леонідович, Лехціер Леонід Романович, Ульшин Віталій Олександрович
МПК: G06K 9/00
Мітки: розпізнавання, спосіб, об'єктів, геометричних
Формула / Реферат:
1. Спосіб розпізнавання геометричних об'єктів, у якому на розпізнаваному об'єкті визначають проекції характерних частин об'єкта і формують матрицю проекцій розпізнаваного об'єкта, після чого сформовану матрицю проекцій розпізнаваного об'єкта порівнюють з матрицею проекцій еталонного об'єкта і ідентифікують розпізнаваний геометричний об'єкт за критерієм близькості, який відрізняється тим, що критерій близькості формують як ряд проекцій на...
Спосіб радіолокаційного розпізнавання об’єктів
Номер патенту: 17731
Опубліковано: 16.10.2006
Автори: Булай Андрій Миколайович, Обод Іван Іванович, Овсянніков Петро Васильович
МПК: G01S 13/00
Мітки: об'єктів, розпізнавання, спосіб, радіолокаційного
Формула / Реферат:
Радіолокаційний спосіб розпізнавання об’єктів, який полягає в тому, що запитником випромінюють кодовий сигнал запиту, код якого визначають за кодом шкали часу системи розпізнавання, який приймають відповідачем, порівнюють його з діючим кодовим сигналом запиту у даний момент часу, код сигналу відповіді визначають за кодом шкали часу системи розпізнавання, який приймають запитником і порівнюють його з діючим кодовим сигналом відповіді у даний...
Попередній патент: Пристрій для транспортування і очистки коренебульбоплодів
Наступний патент: Спосіб цифрового комплексного радіопеленгування
Випадковий патент: Спосіб виготовлення кисломолочних продуктів