Спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур
Номер патенту: 100730
Опубліковано: 10.08.2015

Формула / Реферат
Спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур, який полягає в тому, що стабілізують роботу сошника шляхом фіксації положення з урахуванням відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу станів реальної та нормованої глибин борозни, потужності нарізання борозни сошником, вологості й щільності ґрунту та інших фізико-механічних параметрів ґрунту, ширини борозни та швидкості переміщення сівалки, який відрізняється тим, що змінюють просторове положення сошника для нарізання борозни, відокремлюючи постійні та змінні керуючі впливи, при цьому із постійних керуючих впливів формують команди і змінюють основне просторове положення сошника, а змінні керуючі впливи перетворюють у взаємно корелюючі функції та зчитують величини цих функцій, на основі яких формують корегуючі команди і здійснюють уточнення просторового положення сошника.
Текст
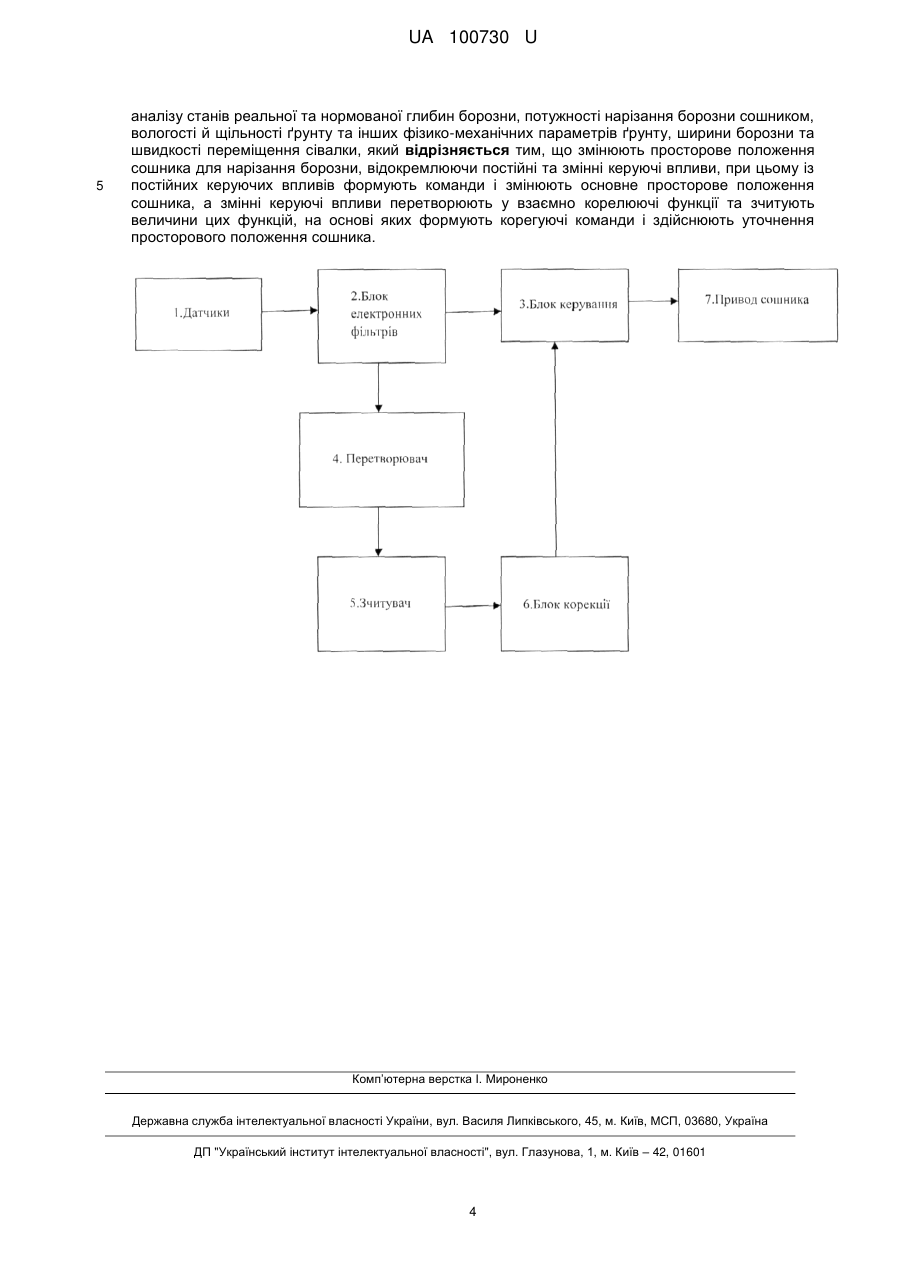
Реферат: Спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур, який полягає в тому, що стабілізують роботу сошника шляхом фіксації положення з урахуванням відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу станів реальної та нормованої глибин борозни, потужності нарізання борозни сошником, вологості й щільності ґрунту та інших фізико-механічних параметрів ґрунту, ширини борозни та швидкості переміщення сівалки. Змінюють просторове положення сошника для нарізання борозни, відокремлюючи постійні та змінні керуючі впливи, при цьому із постійних керуючих впливів формують команди і змінюють основне просторове положення сошника, а змінні керуючі впливи перетворюють у взаємно корелюючі функції та зчитують величини цих функцій, на основі яких формують корегуючі команди і здійснюють уточнення просторового положення сошника. UA 100730 U (12) UA 100730 U UA 100730 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до сільськогосподарського машинобудування, зокрема до устаткування сівалок, і може бути використана в керуванні технологічними процесами висіву насіння у польових умовах. До відомих способів адаптивного керування процесом нарізання сошником борозни для посіву просапних культур можна віднести спосіб, що враховує неоднорідні властивості та фізико-механічні параметри (щільність, аерація, шпаруватість, вологість) ґрунту на довжині гону, оптимальну рівномірність розміщення насіння в борозні і спрямований на підвищення точності формування борозни [АС СССР № 169918, МПК А01С 7/04]. Недоліком відомих способів є те, що при експлуатації робоча поверхня сошників зношується із-за неоднорідності властивостей і фізико-механічних параметрів ґрунту на довжині гону та наближається до циліндричної формі, а це сприяє підняттю сошника при наїзді на грудки, що знижує рівномірність нарізання глибини борозни та не забезпечує нормовану глибину борозни. При цьому сошники піднімаються над ґрунтом настільки, що одна частина насіння виявляється на поверхні поля, інша - заглиблюється до глибини 3…5 см кожен раз після проїзду грудок сошником, що також веде до прямих втрат частини посівного матеріалу. Найбільш близьким є спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур, який полягає в тому, що стабілізують роботу сошника шляхом фіксації положення з урахуванням відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу станів реальної та нормованої глибин, потужності нарізання борозни дисками сошника, вологості й щільності ґрунту та інших фізико-механічних параметрів ґрунту, ширини борозни та швидкості переміщення сівалки (Патент України № 84925, кл. А01С 7/00). Недоліком даного способу є те, що він забезпечує низьку точність та продуктивність нарізання борозни сошником, так як в процесі сівби не контролюють реальний стан деталей сошника сівалки в сенсі зношування його дисків, загортачів тощо. Кожний сошник не забезпечений можливістю плавної зміни глибини нарізання борозни, автоматичне регулювання відсутнє, тому при налагоджуванні сівалки на різну глибину посіву в кожному проході потрібні великі витрати часу. Окрім того, у відомому способі відсутній облік взаємного впливу каналів керування, використання статичної моделі процесів нарізання сошником борозни і, таким чином, низька якість апроксимації експериментальних даних з наступними помилками в обчисленні керуючого впливу, принципова неможливість забезпечення оптимальності перехідних процесів. Ці недоліки знижують польову схожість насіння і рівномірність розміщення насіння в борозні, а також призводять до збільшення витрат рідин, що вносяться в борозну. В основу корисної моделі поставлено задачу удосконалення способу адаптивного керування процесом нарізання сошником борозни для посіву просапних культур, так як об'єкт є нелінійним, нестаціонарним, динамічним, стохастичним з різними темповими каналами вимірювання та великим запізнюванням, шляхом повного перебору можливих вхідних впливів з підтримкою заданої нормованої глибини борозни з урахуванням виду висівного насіння та реального стану об'єкту керування, що забезпечить рівномірність глибини посівної борозни по довжині гону і можливість уніфікованого адаптивного керування нестаціонарними процесами нарізання сошником борозни. Це надасть необхідну інформацію для прийняття рішень і виконання технологічної операції нарізання сошником посівної борозни для забезпечення найкращих умов проростання, підвищення польової схожості насіння, зниження витрат рідини і підвищення рівномірності розміщення насіння в борозні та в кожному з сусідніх (суміжних) рядках з забезпеченням найкращого розвитку рослин. Поставлена задача вирішується за рахунок того, що спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур полягає в тому, що стабілізують роботу сошника шляхом фіксації положення з урахуванням відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу станів реальної та нормованої глибин борозни, потужності нарізання борозни сошником, вологості й щільності ґрунту та інших фізико-механічних параметрів ґрунту, ширини борозни та швидкості переміщення сівалки. Згідно з корисною моделлю, змінюють просторове положення сошника для нарізання борозни, відокремлюючи постійні та змінні керуючі впливи, при цьому із постійних керуючих впливів формують команди і змінюють основне просторове положення сошника, а змінні керуючі впливи перетворюють у взаємно корелюючі функції та зчитують величини цих функцій, на основі яких формують корегуючі команди і здійснюють уточнення просторового положення сошника. Корисна модель пояснюється кресленням, яке реалізує запропонований спосіб. На креслені зображено наступне: блок 1 - датчики, які вимірюють фактичну глибину борозни, стан роботи механізмів сівалки, вологість ґрунту на глибині висіву насіння, щільність ґрунту та 1 UA 100730 U 5 10 15 20 25 30 35 40 45 50 55 60 інші, які визначають фізико-механічні параметри ґрунту, ширину борозни, потужності копання борозни, задану нормовану глибину нарізання борозни та враховують швидкість переміщення сівалки; блок 2 - електронних фільтрів, які виділяють і відокремлюють постійні та змінні сигнали з датчиків блока 1; блок 3 - керування, в якому формуються керуючі впливи на зміну просторового положення сошника; блок 4 - перетворювач, який перетворює змінні корегуючі впливи у взаємно корелюючі функції; блок 5 - зчитувач, який зчитує величини взаємно корелюючих функцій; блок 6 - корекції, яким формують корегуючі команди на зміну просторового положення сошника у борозні та блок 7 - привод сошника, який може бути пневматичним або гідравлічним циліндром, або іншим. Спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур реалізується за рахунок виконання наступної послідовності операцій за один прохід сівалки: грудковідведення перед сошником і нарізування сошником посівної борозни з одночасною реєстрацією відповідними датчиками 1 - глибини посівної борозни по довжині гону, висіву насіння, фотографування в реальному часі цифровою камерою тепловізора дійсного стану орного поля, виконують інфрачервону термографію орного поля і посівної борозни за допомогою тепловізору з вбудованою в нього цифровою камерою, і визначають піксель-матриці температури та вологості ґрунтів у зоні висіву насіння орного поля і посівної борозни; за допомогою аналізатора обробляють і уточнюють похибки виміру температури і вологості ґрунтів орного поля та борозни, використовуючи матриці пікселів їх інфрачервоної термографії і вологи та обчислюють щільність ґрунту у посівної борозни; визначаються постійні та змінні керуючі команди, які впливають на роботу сошника, та їх відокремлюють у блоці 2; визначають фактичне просторове положення сошника та зрівнюють його положення із нормованим; якщо у блоці 2 сформуються постійні команди, то вони подаються у блок керування 3 на зміну основного просторового положення сошника, а якщо змінні - то вони перетворюються у взаємно корелюючі функції у блоці 4 та зчитують величини цих функцій блоком 5 і обробляються у блоці корекції 6 та на основі сформованих команд у реальному масштабі часу уточнюють основне просторове положення привода 7 сошника для нарізання нормованої глибини борозни; для забезпечення найбільш сприятливих фізико-механічних параметрів ґрунту в посівній борозні виконується його розпушування, якщо щільність цього ґрунту нижче потрібної норми; при заданих нормах висіву насіння у посівну борозну, заданих і виміряних значеннях параметрів датчиками 1 з урахуванням дійсного стану орного поля визначається відстань між насінинами; введення раціональної порції активованих добрив і стимуляторів росту на посіяне насіння та додавання до цієї порції обчисленого об'єму води, якщо вологість ґрунту посівної борозни менше оптимальної, тобто вологість ґрунту посівної борозни доводиться до оптимального значення; загортання насіння ґрунтом і ущільнення їх у борозні поєднують з передчасною подачею в них спільного потоку насіння з водою, активованих добрив й стимуляторів росту на потрібну глибину закладання з регульованим зусиллям і шляхом раціонального зволоження водою ґрунту посівної борозни в функції від його вологості та щільності з подальшим шліфуванням і мульчуванням дрібноструктурним ґрунтом. Для здійснення заявленого способу використовують серійну сівалку з будь-яким висівним апаратом, пристроєм грудковідведення, сошником, переднім і заднім котками, що накочуються, і пристроєм, який виштовхує насіння, дві ємності: з водою та рідиною, ланцюговий шлейф, призначений для шлейфування ґрунту над рівчаком та інше. Подача води й рідини із ємностей забезпечується відповідно насосами та при відкриванні відповідних клапанів. У поєднані з насіннєпроводом для контролю висіву насіння використовується датчик висіву насіння. У висівному апараті також встановлені датчики: обертання висіваючого диска та рівня насіння. Пневматичний або гідравлічний механізм привода 7 сошника регулює глибину нарізання сошником борозни при керуванні блоком 3. Глибина посівної борозни контролюється датчиками 1, шляхом використання контактного або безконтактного, наприклад, ультразвукового, датчика. Механізми сівалки контролюються датчиками стану, сигнали яких подаються у блок 1. Перед сівбою на сівалці попередньо задають потрібні вид насіння і норми його висіву, допустимі значення температури, вологості та щільності ґрунту орного поля і посівної борозни, нормовану глибину борозни та норми витрат активованих добрив і стимуляторів росту тощо. Пристрій автоматичного регулювання (на креслені не показаний) попередньо обчислює і 2 UA 100730 U 5 10 15 20 25 30 35 встановлює необхідні відстані між насінинами в рядку за рахунок початкових заданих трактористом параметрів і зміни частоти обертання висівного диска секції сівалки. Одночасно з цим автоматично визначається і зміщення в сусідніх (суміжних) рядках на піввідстані між місцями розташування насінин. Крім того, шляхом переміщення висівних секцій одна до одної встановлюють відповідну ширину між сусідніми (суміжними) рядками (ширина міжрядь). Настроюють цифрову камеру вбудовану у тепловізор. Роблять декілька знімків цифровою камерою і перевіряють по ним дійсний стан орного поля. Потім нарізують сошником, використовуючи привід 7, посівну борозну і виконують тепловізором пробну інфрачервону термографію, по якій визначають правильність налаштувань тепловізора і перевіряють відповідність температурного поля поверхні ґрунтів орного поля і борозни в зоні висіву насіння за допомогою еталонних стандартних пристроїв, наприклад, вимірювачем вологості і температури типу DT-616CT. При необхідності вносяться відповідні коригування. Після того, як буде нарізана посівна борозна і тепловізором будуть виміряні параметри ґрунтів орного поля та посівної борозни і по вологості ґрунту посівної борозни визначена його щільність і проведено її зрівняння із заданою, і якщо ця щільність не є оптимальною, то пристрій автоматичного регулювання, залежно від рівня щільності, включає на потрібну глибину розпушувач ґрунту. Далі у борозну закладаються насіння на відстані одне від одного залежно від дійсного стану орного поля і посівної борозни та параметрів ґрунтів і додають через додатковий патрубок у патрубок розраховану кількість води для забезпечення оптимальної вологості ґрунту і порцію активованих добрив і стимуляторів росту (рідини) на насіння у посівній борозні. Складові сигналів з датчиків блока 1 несуть повну інформацію про процеси, які відбуваються в зоні посівної борозни. їх інформація складається з постійних і змінних виміряних сигналів. Виникнення та зрив процесу нарізання сошником борозни, різні зміни в деталях та конструкціях сошника, що утворюються на поверхнях тертя, неоднорідність ґрунту, що оброблюється, безпосереднє вимірювання вологи в зоні борозни на глибині висіву насіння, визначення потужності копання борозни та інших даних є основними параметрами технологічного процесу, що впливають на роботу сошника у перехідних процесах. Постійні та змінні керуючі команди відокремлюються у блоці 2 за допомогою електронних фільтрів, перші із яких формують через блок 3 керування команди в блок 7 на зміну основного просторового положення сошника, а другі перетворюються у взаємно корелюючі функції та зчитують величини цих функцій, наоснові яких формують у реальному масштабі часу корегуючі функції на уточнення основного просторового положення привода сошника для нарізання заданої нормованої глибини борозни. Перетворення змінних складових сигналів у взаємно кореляційні функції у блоці 4 є згортання сигналів, виділених із датчиків у блоці 1 в початковий момент, наприклад pm (t) , з поточними сигналами, наприклад, p c (t) , згідно з виразом: p (t) p c (t )( m z(t) pm (t) p c (t) 40 45 50 де Z - згортання сигналів p m та p c , t - часове зміщення сигналів p m та p c , параметрична зміна згортання сигналів. Інформація з перетворювача 4, який може бути виконаний в вигляді когерентного оптичного процесору або іншим, після визначення взаємно корелюючих функцій, зчитується блоком 5, який визначає величини взаємно корелюючих функцій та після корекції у блоці 6 подається у блок 3 керування на уточнення просторового положення привода дисків сошника (блок 7) для підтримки заданої нормованої глибини борозни для посіву пропасних культур. Таким чином, запропонований спосіб дозволяє з високим ступенем точності (відносна похибка складає не більше 0,12 %) підтримувати нормовану глибину посівної борозни по довжині гону посівного поля за рахунок обліку і використання постійних і змінних керуючих впливів на об'єкт керування. Отримання більш точної інформації про швидкість зношення деталей сошника в процесі на нарізання борозни, та врахування фізико-механічних параметрів ґрунту в посівній борозні, що в кінцевому результаті дозволяє підвищити продуктивність нарізання борозен у 1,6-1,8 разу та знизити собівартість до 30 %. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур, який полягає в тому, що стабілізують роботу сошника шляхом фіксації положення з урахуванням відповідних керуючих впливів, оптимальні значення яких обчислюють на базі 3 UA 100730 U 5 аналізу станів реальної та нормованої глибин борозни, потужності нарізання борозни сошником, вологості й щільності ґрунту та інших фізико-механічних параметрів ґрунту, ширини борозни та швидкості переміщення сівалки, який відрізняється тим, що змінюють просторове положення сошника для нарізання борозни, відокремлюючи постійні та змінні керуючі впливи, при цьому із постійних керуючих впливів формують команди і змінюють основне просторове положення сошника, а змінні керуючі впливи перетворюють у взаємно корелюючі функції та зчитують величини цих функцій, на основі яких формують корегуючі команди і здійснюють уточнення просторового положення сошника. Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01C 7/20, A01B 23/00
Мітки: процесом, нарізання, сошником, культур, посіву, керування, борозни, просапних, адаптивного, спосіб
Код посилання
<a href="https://ua.patents.su/6-100730-sposib-adaptivnogo-keruvannya-procesom-narizannya-soshnikom-borozni-dlya-posivu-prosapnikh-kultur.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивного керування процесом нарізання сошником борозни для посіву просапних культур</a>
Посівна секція для прямого посіву насіння просапних культур
Номер патенту: 47585
Опубліковано: 10.02.2010
Автори: Веретенніков Григорій Пилипович, Шмат Сергій Іванович, Янчук Валерій Анатолійович, Пислиця Анна Миколаївна, Абрамова Вікторія Вікторівна
МПК: A01C 7/00
Мітки: культур, насіння, прямого, посіву, посівна, секція, просапних
Формула / Реферат:
Посівна секція для прямого посіву насіння просапних культур, яка складається з кронштейна, паралелограмної підвіски, висівного апарата, сошника, коточка, прикочуючого колеса, шлейфа, механізму регулювання глибини ходу сошника, яка відрізняється тим, що перед сошником додатково встановлено на глибині, аналогічній глибині ходу сошника, стрілчасту лапу з плоскорізами та важелем, при цьому стрілчаста лапа в центральній частині має відгортаючі...
Гребеневий спосіб посіву просапних сільськогосподарських культур
Номер патенту: 25698
Опубліковано: 27.08.2007
Автори: Білоткач Михайло Петрович, Шквира Андрій Степанович, Півень Анатолій Степанович
МПК: A01C 7/00
Мітки: просапних, гребеневий, культур, посіву, сільськогосподарських, спосіб
Формула / Реферат:
Гребеневий спосіб посіву просапних сільськогосподарських культур, що включає проведення посіву насіння і формування гребеня, який відрізняється тим, що спочатку формують гребінь з верхнього прогрітого шару ґрунту, а посів насіння виконують безпосередньо в сформований насипний гребінь, після чого прикочують гребінь коточками, розташованими за сошником та під кутом один до одного.
Спосіб посіву насіння просапних культур і пристрій для його здійснення
Номер патенту: 23165
Опубліковано: 19.05.1998
Автори: Радзієвський Леонід Леонідович, Шмат Сергій Іванович, Шило Валерія Сергіївна, Іванько Іван Павлович
МПК: A01C 7/00
Мітки: просапних, посіву, здійснення, пристрій, культур, насіння, спосіб
Формула / Реферат:
Спосіб посіву насіння просапних культур, який включає поверхневий обробіток грунту і посів насіння просапними сівалками, який відрізняється тим, що одночасно з посівом насіння проводять поверхневий обробіток зони рядка з відгортанням лапами-відвальниками поверхневого прошарку грунту глибиною 4-8 см І шириною 10-16 см,2, Спосіб посіву по п. 1, який відрізняється тим, що для боротьби з бур'янами без застосування гербіцидів одночасно з...
Спосіб посіву зернових культур і трав
Номер патенту: 93690
Опубліковано: 10.03.2011
Автори: Бабицький Леонід Федорович, Ніколаєв Євген Володимирович, Тарасенко Володимир Іванович, Мельников Михайло Михайлович
Мітки: трав, посіву, спосіб, зернових, культур
Формула / Реферат:
Спосіб посіву зернових культур і трав, що включає утворення на поверхні ґрунту борозни за допомогою дискового сошника, закладання насіння на дно борозни з наступним її загортанням, який відрізняється тим, що одночасно із закладанням насіння здійснюють додатковий притиск сошника до ґрунту, обмеження ходу сошника за глибиною й утворення канавок прямокутного профілю по рядках висіяного насіння за допомогою опорно-притискного пристрою, що...
Спосіб адаптивного керування процесом обробки деталей на металорізальних верстатах
Номер патенту: 69285
Опубліковано: 25.04.2012
Автори: Ревенко Ірина Володимирівна, Філіпова Марина В'ячеславівна, Шевченко Вадим Володимирович
Мітки: деталей, процесом, металорізальних, адаптивного, спосіб, верстатах, керування, обробки
Формула / Реферат:
Спосіб адаптивного керування процесом обробки деталей на металорізальних верстатах, який полягає в зміні режимів різання в функції вимірювальних в процесі обробки сигналів термоерс, потужності різання та пружних переміщень технологічної системи, який відрізняється тим, що з метою підвищення точності та продуктивності обробки, відокремлюють постійні та складові сигналів, при цьому по постійних складових формують керуючі програми на зміну...
Попередній патент: Композиція жирової начинки для вафель “злакові”
Наступний патент: Отримання рослинної субстанції з відхаркувальною та протизапальною активністю
Випадковий патент: Екзотермічна суміш для легування залізовуглецевих сплавів хромом в ковші