Перетворювач лінійних переміщень
Номер патенту: 102222
Опубліковано: 26.10.2015
Автори: Векілов Самір Шамсійович, Дудніков Володимир Степанович

Формула / Реферат
1. Перетворювач лінійних переміщень, що спирається на поверхню досліджуваного об'єкта в трьох точках, розташованих у вершинах прямокутного трикутника, та включає корпус, в якому консольно закріплені два плоских чутливих елементи з наклеєними на них тензорезисторами, у вигляді балочок рівного опору, площини яких взаємно перпендикулярні, який відрізняється тим, що один чутливий елемент своїм широким кінцем закріплений в корпусі, а другий вузьким кінцем за допомогою перехідника з'єднаний з широким кінцем другого елемента, який своїм вузьким кінцем спирається на поверхню досліджуваного об'єкта в одній з вершин опорного прямокутного трикутника, дві інші вершини якого розташовані на корпусі.
2. Перетворювач за п. 1, який відрізняється тим, що вісь другого чутливого елемента розташована в площині першого елемента, при цьому обидві осі розташовані в площині одного з катетів опорного трикутника.
Текст
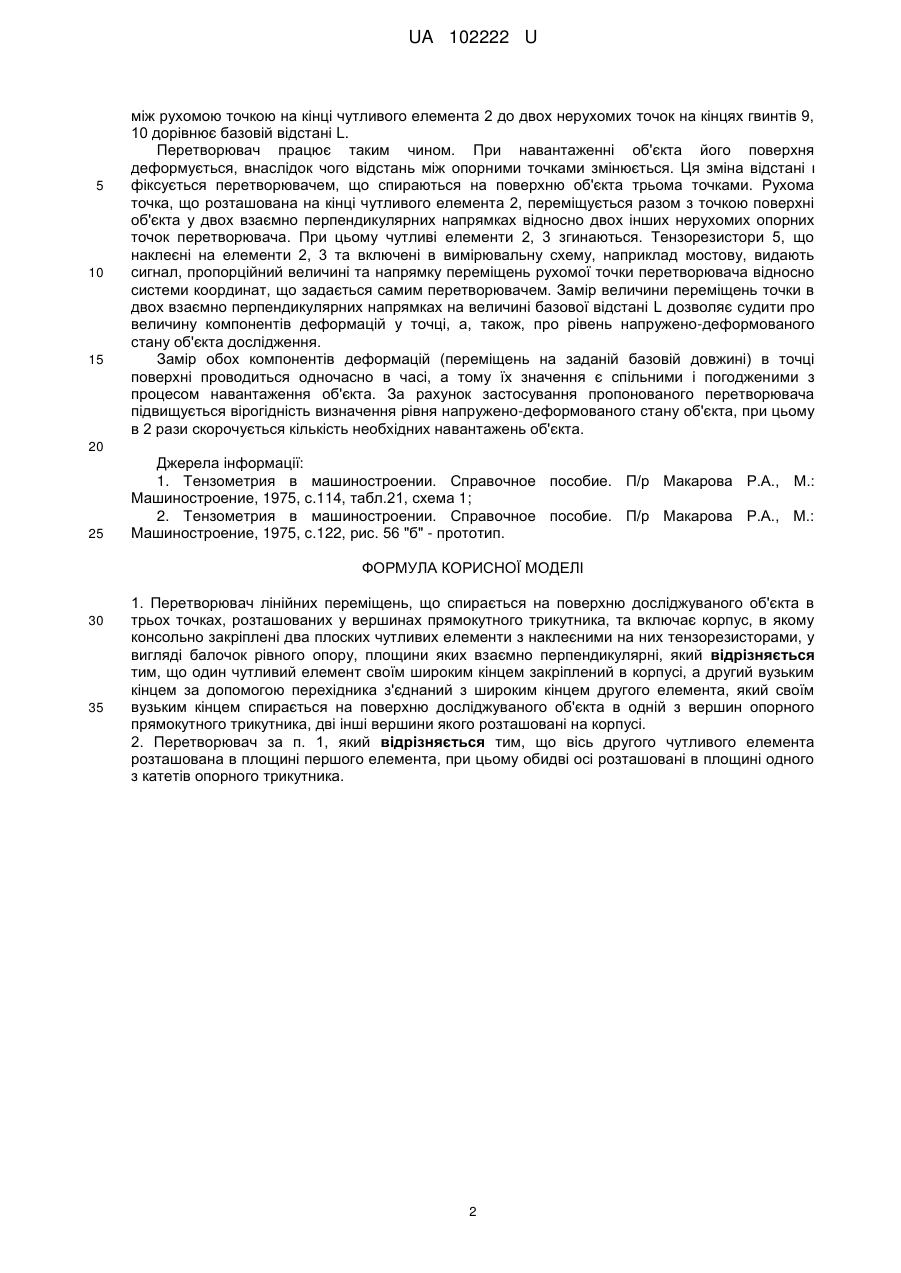
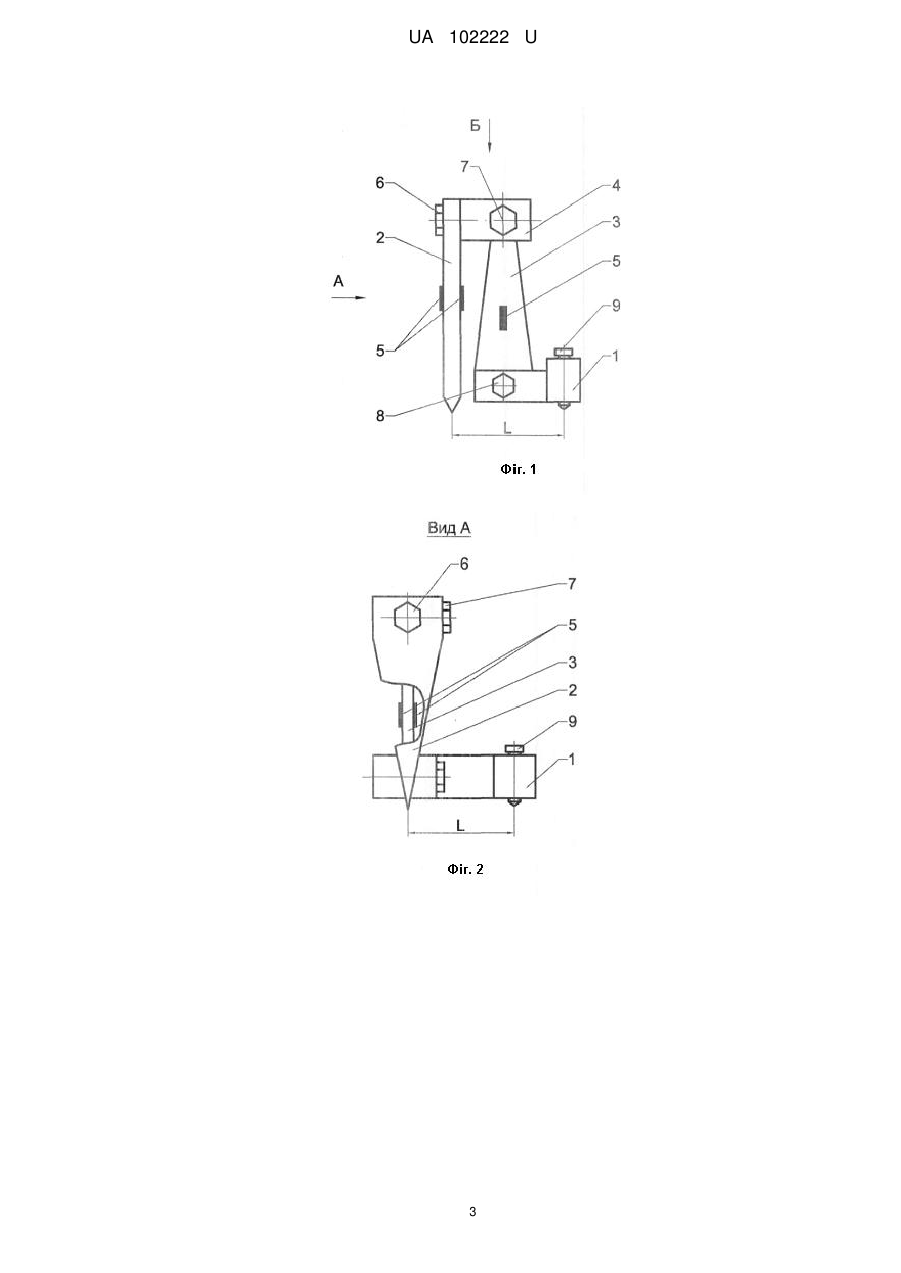
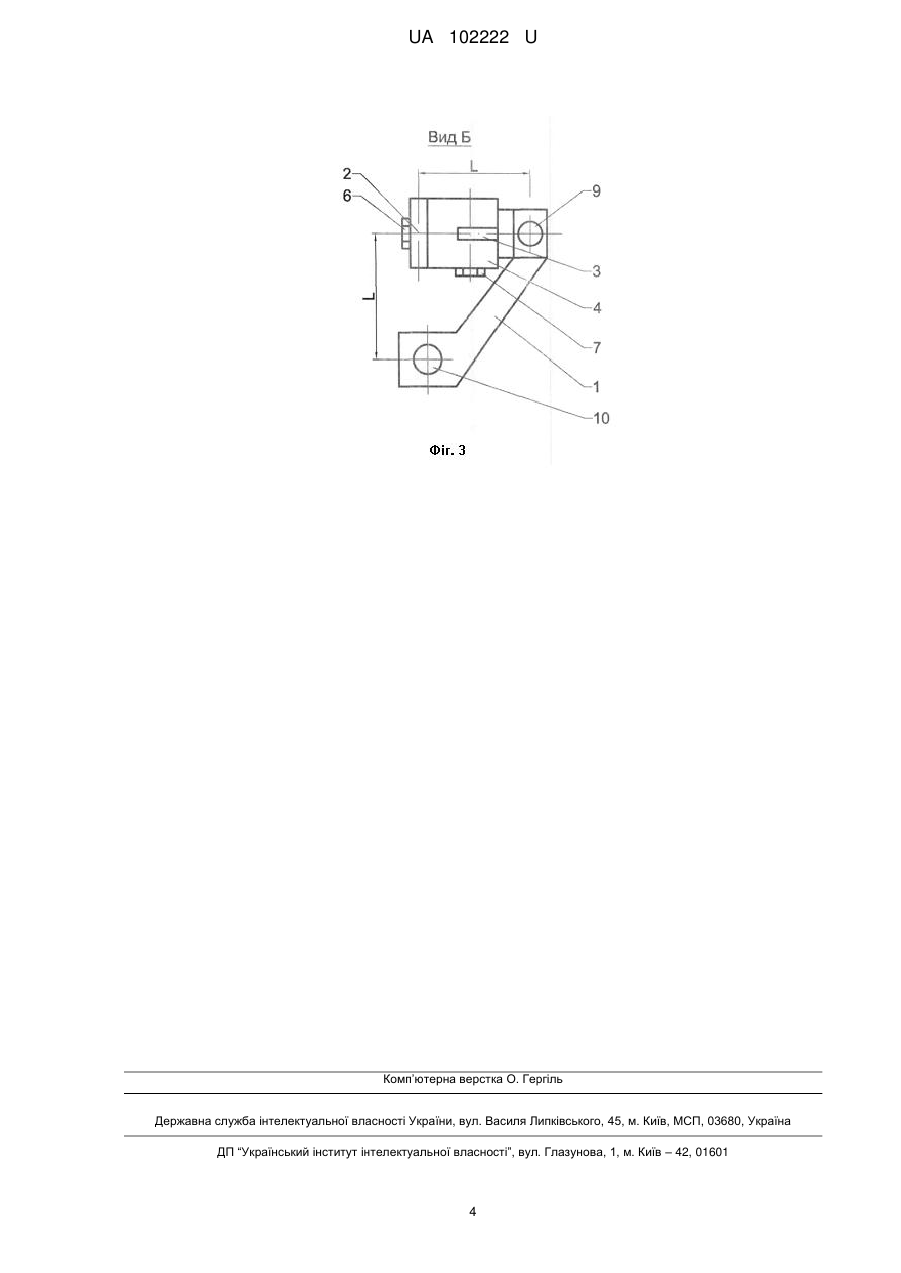
Реферат: Перетворювач лінійних переміщень, спирається на поверхню досліджуваного об'єкта в трьох точках, розташованих у вершинах прямокутного трикутника, та включає корпус, в якому консольно закріплені два плоских чутливих елементи з наклеєними на них тензорезисторами, у вигляді балочок рівного опору, площини яких взаємно перпендикулярні. Один чутливий елемент своїм широким кінцем закріплений в корпусі, а другий вузьким кінцем за допомогою перехідника з'єднаний з широким кінцем другого елемента, який своїм вузьким кінцем спирається на поверхню досліджуваного об'єкта в одній з вершин опорного прямокутного трикутника, дві інші вершини якого розташовані на корпусі. UA 102222 U (54) ПЕРЕТВОРЮВАЧ ЛІНІЙНИХ ПЕРЕМІЩЕНЬ UA 102222 U UA 102222 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до контрольно-вимірювальної техніки, а саме до будови тензорезисторних перетворювачів лінійних переміщень і може бути використана у різних галузях науки і техніки, скрізь, де потрібне дистанційне вимірювання переміщень і деформацій у двох взаємно перпендикулярних напрямках. Відомий тензорезисторний перетворювач лінійних переміщень, що містить консольно закріплений на корпусі плоский чутливий елемент у вигляді балки рівного опору, на який наклеєні тензорезистори, при цьому перетворювач контактує з об'єктом дослідження тільки чутливим елементом [1]. Однак, даний перетворювач вимірює переміщення тільки в одному напрямку (у напрямку, перпендикулярному площині чутливого елемента). Крім того, так як ці переміщення вимірюються в системі координат, не пов'язаний з поверхнею досліджуваного об'єкта, то величина відносної деформації поверхні об'єкта в точці не може бути встановлена. Найбільш близьким аналогом до перетворювача, який вибрано за прототип, є перетворювач лінійних переміщень, що спирається на поверхню досліджуваного об'єкта в трьох точках, розташованих у вершинах прямокутного трикутника, та включає корпус, в якому консольно закріплені два плоских чутливих елементи з наклеєними на них тензорезисторами, наприклад, у вигляді балочок рівного опору, площини яких взаємно перпендикулярні [2]. Перетворювач спирається на досліджуваний об'єкт трьома точками, завдяки чому система координат відліку виявляється пов'язаною з поверхнею об'єкта, при цьому одна точка належить корпусу, а дві інші - чутливим елементам. Вимірюється переміщення між нерухомою корпусною точкою і рухливими (разом з точкою поверхні об'єкта) кінцями чутливих елементів. Так як кінці чутливих елементів розташовуються на різних променях прямого кута, утвореного перетином напрямків виміру, то отримані результати вимірювання переміщень у двох взаємно перпендикулярних напрямках відносяться до двох абсолютно різних точок поверхні об'єкта. Таким чином, для кожної точки поверхні вимірюється тільки один з двох компонентів деформованого стану. Для отримання другого компонента (в перпендикулярному напрямку) в точці необхідна перестановка і переорієнтування перетворювача на поверхні об'єкта, а також повністю ідентичне повторення процесу навантаження об'єкта, що викликає значні труднощі. Компоненти деформацій у точці виявляються несумісними за часом, а, отже, можуть бути і несумісними за значеннями, що вносить помилку в достовірність експериментального визначення рівня напружено-деформованого стану поверхні досліджуваного об'єкта. В основу корисної моделі поставлена задача вимірювання деформацій для однієї точки поверхні у двох взаємно перпендикулярних напрямках. Поставлена задача вирішується тим, що у перетворювачі лінійних переміщень, що спирається на поверхню досліджуваного об'єкта в трьох точках, розташованих у вершинах прямокутного трикутника, та включає корпус, в якому консольно закріплені два плоских чутливих елемента з наклеєними на них тензорезисторами, наприклад, у вигляді балочок рівного опору, площини яких взаємно перпендикулярні, згідно з корисною моделлю, один чутливий елемент своїм широким кінцем закріплений в корпусі, а другим вузьким кінцем за допомогою перехідника з'єднаний з широким кінцем другого елемента, який своїм вузьким кінцем спирається на поверхню досліджуваного об'єкта в одній з вершин опорного прямокутного трикутника, дві інші вершини якого розташовані на корпусі. Крім того, вісь другого чутливого елемента розташована в площині першого елемента, при цьому обидві осі розташовані в площині одного з катетів опорного трикутника. Суть корисної моделі пояснюється кресленням, де на фіг. 1 зображений пропонований перетворювач лінійних переміщень; на фіг. 2 зображено вигляд по стрілці А на фіг. 1; на фіг. 3 вид по стрілці Б на фіг. 1. Перетворювач містить корпус 1, два плоских чутливих елемента 2, 3, які з'єднані між собою кронштейном 4. Елементи 2, 3 виконані у вигляді балочок рівного опору. На них наклеєні тензорезистори 5. Елемент 2 консольно закріплений на кронштейні 4 за допомогою болта 6. Кінці елемента 3 закріплені в кронштейні 4 і корпусі 1 болтами 7, 8 відповідно. У корпусі 1 встановлені гвинти 9, 10, за допомогою яких перетворювач спирається на поверхню досліджуваного об'єкта (на кресленні не показано). Як третя опорна точка використовується другий (незакріплений) кінець чутливого елемента 2. Площини чутливих елементів 2, 3 взаємно перпендикулярні, а осі їх паралельні. Три опорні точки перетворювача розташовуються в вершині і на променях прямого кута, утвореного перетином двох взаємно перпендикулярних напрямків вимірювання переміщень. При цьому вісь чутливого елемента 2, не пов'язаного з корпусом 1, розташована в площині чутливого елемента 3, закріпленого в корпусі 1. Три контактні точки перетворювача при опорі на поверхню досліджуваного об'єкта утворюють систему двох взаємно перпендикулярних координат, пов'язану з поверхнею об'єкта. Відстань 1 UA 102222 U 5 10 15 між рухомою точкою на кінці чутливого елемента 2 до двох нерухомих точок на кінцях гвинтів 9, 10 дорівнює базовій відстані L. Перетворювач працює таким чином. При навантаженні об'єкта його поверхня деформується, внаслідок чого відстань між опорними точками змінюється. Ця зміна відстані ι фіксується перетворювачем, що спираються на поверхню об'єкта трьома точками. Рухома точка, що розташована на кінці чутливого елемента 2, переміщується разом з точкою поверхні об'єкта у двох взаємно перпендикулярних напрямках відносно двох інших нерухомих опорних точок перетворювача. При цьому чутливі елементи 2, 3 згинаються. Тензорезистори 5, що наклеєні на елементи 2, 3 та включені в вимірювальну схему, наприклад мостову, видають сигнал, пропорційний величині та напрямку переміщень рухомої точки перетворювача відносно системи координат, що задається самим перетворювачем. Замір величини переміщень точки в двох взаємно перпендикулярних напрямках на величині базової відстані L дозволяє судити про величину компонентів деформацій у точці, а, також, про рівень напружено-деформованого стану об'єкта дослідження. Замір обох компонентів деформацій (переміщень на заданій базовій довжині) в точці поверхні проводиться одночасно в часі, а тому їх значення є спільними і погодженими з процесом навантаження об'єкта. За рахунок застосування пропонованого перетворювача підвищується вірогідність визначення рівня напружено-деформованого стану об'єкта, при цьому в 2 рази скорочується кількість необхідних навантажень об'єкта. 20 25 Джерела інформації: 1. Тензометрия в машиностроении. Справочное пособие. П/р Макарова Р.А., Μ.: Машиностроение, 1975, с.114, табл.21, схема 1; 2. Тензометрия в машиностроении. Справочное пособие. П/р Макарова Р.А., М.: Машиностроение, 1975, с.122, рис. 56 "б" - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 1. Перетворювач лінійних переміщень, що спирається на поверхню досліджуваного об'єкта в трьох точках, розташованих у вершинах прямокутного трикутника, та включає корпус, в якому консольно закріплені два плоских чутливих елементи з наклеєними на них тензорезисторами, у вигляді балочок рівного опору, площини яких взаємно перпендикулярні, який відрізняється тим, що один чутливий елемент своїм широким кінцем закріплений в корпусі, а другий вузьким кінцем за допомогою перехідника з'єднаний з широким кінцем другого елемента, який своїм вузьким кінцем спирається на поверхню досліджуваного об'єкта в одній з вершин опорного прямокутного трикутника, дві інші вершини якого розташовані на корпусі. 2. Перетворювач за п. 1, який відрізняється тим, що вісь другого чутливого елемента розташована в площині першого елемента, при цьому обидві осі розташовані в площині одного з катетів опорного трикутника. 2 UA 102222 U 3 UA 102222 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear displacement transducer
Автори англійськоюDudnikov Volodymyr Stepanovych, Vekilov Samir Shamsiiovych
Назва патенту російськоюПреобразователь линейных перемещений
Автори російськоюДудников Владимир Степанович, Векилов Самир Шамсийович
МПК / Мітки
Мітки: лінійних, переміщень, перетворювач
Код посилання
<a href="https://ua.patents.su/6-102222-peretvoryuvach-linijjnikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Перетворювач лінійних переміщень</a>
Пристрій для вимірювання лінійних переміщень

Номер патенту: 16116
Опубліковано: 17.07.2006
Автори: Постнов Генадій Михайлович, Червоний Віталій Миколайович, Дуб Володимир Васильович, Чеканов Микола Анатолійович
МПК: G01B 9/00
Мітки: вимірювання, пристрій, лінійних, переміщень
Формула / Реферат:
Пристрій для вимірювання лінійних переміщень, що містить станину, прямокутну форму у вигляді паралелограма, дві рифлені плексигласові пластини, між якими закладається дослідний зразок, верхня пластина з одного боку навантажується за допомогою "вантажу", який відрізняється тим, що з іншого боку верхньої пластини приєднаний за допомогою гнучкої в'язки датчик лінійних переміщень, який з'єднано з аналого-цифровим перетворювачем.
Механізм лінійних переміщень
Номер патенту: 49572
Опубліковано: 26.04.2010
Автори: Павленко Іван Іванович, Коваль Роман Олександрович, Валявський Іван Анатолійович
МПК: F16H 55/00
Мітки: переміщень, механізм, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої і гвинтової передач, який відрізняється тим, що гвинтова передача виконана хвильовою.
Механізм лінійних переміщень
Номер патенту: 63423
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Валявський Анатолій Іванович
МПК: F16H 25/22
Мітки: механізм, лінійних, переміщень
Формула / Реферат:
Механізм лінійних переміщень, що складається з корпуса, двох штанг, рейкового колеса, зубчастої конічної передачі, електродвигуна, який відрізняється тим, що, при обертанні рейкового колеса, дві штанги з рейками переміщуються в протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Механізм лінійних переміщень
Номер патенту: 48333
Опубліковано: 10.03.2010
Автори: Павленко Іван Іванович, Валявський Іван Анатолійович, Валявський Анатолій Іванович
МПК: F16C 13/00
Мітки: лінійних, механізм, переміщень
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої та гвинтової передач, порожнистої рухомої штанги та трубчастого корпусу, який відрізняється тим, що між корпусом зубчастої передачі та гвинтом встановлений упорний підшипник.
Механізм лінійних переміщень
Номер патенту: 63440
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: лінійних, механізм, переміщень
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої передачі та гвинтової передачі з лівою та правою різьбами на кінцях, двох порожнистих штанг з гайками і двох трубчастих корпусів, який відрізняється тим, що обертання гвинта з лівою та правою різьбами на кінцях примушує дві порожнисті штанги з відповідними гайками переміщуватися у протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Попередній патент: Спосіб розміщення вертикального поручня у громадському транспортному засобі
Наступний патент: Система для вимірювання і контролю параметрів вібрації електричних машин
Випадковий патент: Статор двухфазного асинхронного електродвигуна