Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні
Номер патенту: 104443
Опубліковано: 10.02.2014
Автори: Хомушко Дмитро Валерійович, Бурачек Всеволод Германович

Формула / Реферат
Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, заснований на спостереженні і фіксуванні зміни взаємного просторового положення зображень індексів, які визначають оптичні осі, контролюючого і контрольованого приладів в єдиній системі світлових променів, що несуть зображення індексів, який відрізняється тим, що оптико-електронно контролюють фокусування зображення сітки ниток контрольованого приладу на фотоприймальній матриці контролюючого коліматора, за зворотним зв'язком керують механізмом фокусування коліматора і за відліками на фотоприймальній матриці для заданих значень відстаней фокусування визначають величини зміщення візирної осі контрольованого приладу на всьому діапазоні роботи його фокусувального компонента.
Текст
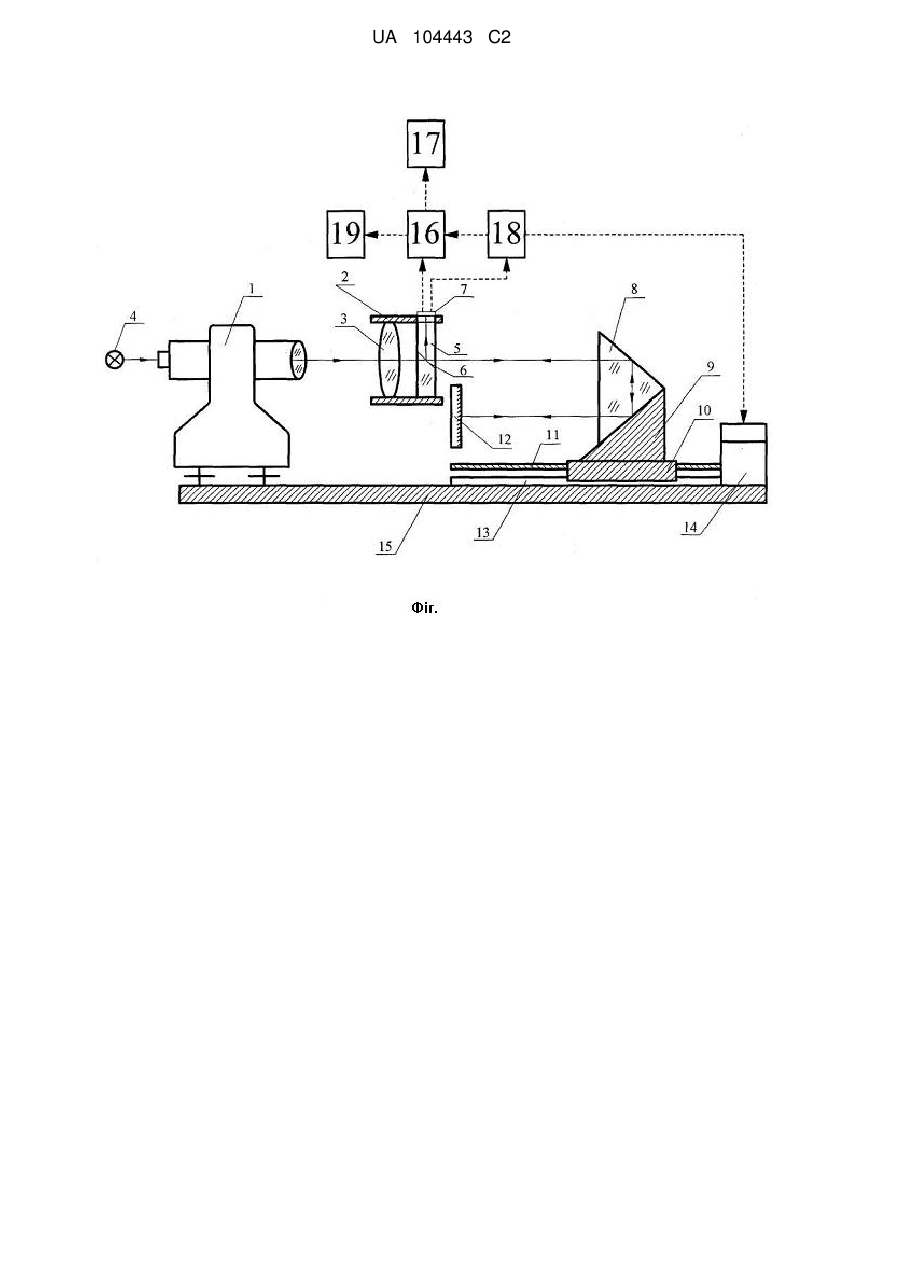
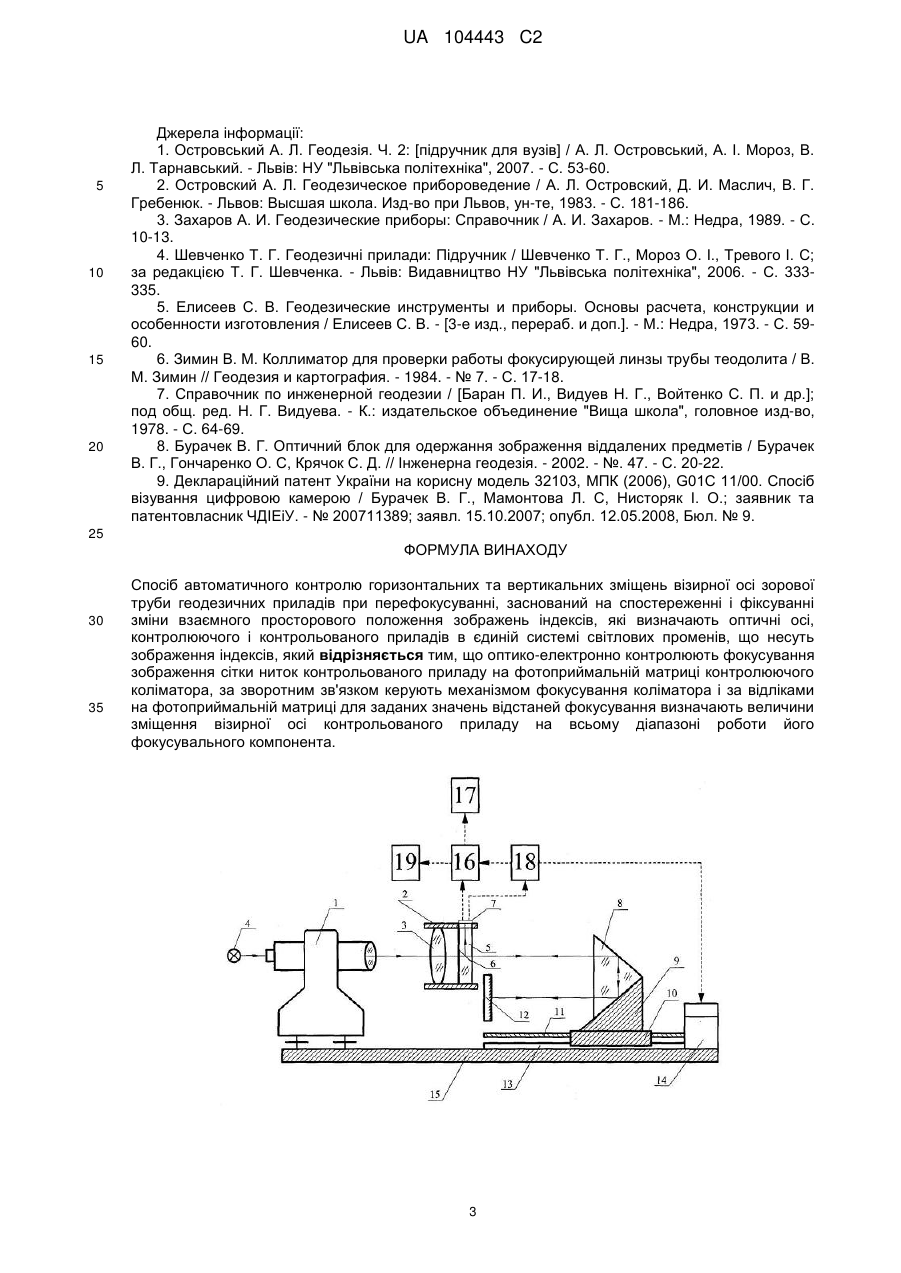
Реферат: Cпосіб належить до області геодезії, зокрема до способів дослідження руху фокусувального компонента зорової труби геодезичних приладів. Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні заснований на спостереженні і фіксуванні зміни взаємного просторового положення зображень індексів, які визначають оптичні осі, контролюючого і контрольованого приладів в єдиній системі світлових променів, що несуть зображення індексів. Оптикоелектронно контролюють фокусування зображення сітки ниток контрольованого приладу на фотоприймальній матриці контролюючого коліматора, за зворотним зв'язком керують механізмом фокусування коліматора і за відліками на фотоприймальній матриці для заданих значень відстаней фокусування визначають величини зміщення візирної осі контрольованого приладу на всьому діапазоні роботи його фокусувального компонента. Винахід дозволяє автоматично визначати горизонтальні та вертикальні зміщення візирної осі зорової труби геодезичних приладів внаслідок руху фокусувального компонента на всьому діапазоні його роботи в лабораторних умовах з підвищеною точністю. UA 104443 C2 (12) UA 104443 C2 UA 104443 C2 5 10 15 20 25 30 35 40 45 50 55 Запропонований спосіб належить до області геодезії, зокрема до способів дослідження руху фокусувального компонента зорової труби геодезичних приладів. Для чіткого зображення предметів (рейок, марок тощо) спостерігач, за допомогою кремальєрного гвинта, переміщує фокусувальний компонент (лінзу), який повинен рухатися вздовж оптичної осі так, щоб лінія візування залишалася незмінною. На практиці механізм переміщення не є ідеальним; у результаті фокусувальний компонент буде мати зміщення, що викликатиме зміни у відліках [1]. Причини, що викликають неправильність руху фокусувального компонента, наступні [2, 3]: - зазори між нерухомими напрямними та рухомою оправою лінзи; - нерівномірний розподіл і забруднення мастила; - зношення всіх деталей фокусувального компонента в процесі експлуатації приладу; - зміна параметрів деталей фокусувального компонента внаслідок зміни температури навколишнього середовища; - зміщення сітки ниток з оптичної осі об'єктива тощо. Дослідження руху фокусувального компонента зорової труби нівеліра проводять за допомогою власне нівеліра, що досліджується, та рейок на відкритій місцевості, при цьому вимірюють перевищення між точками, що розташовані по колу спочатку при однакових плечах (нівелір встановлюють у центрі кола), а потім при різних плечах (нівелір встановлюють на колі, поблизу першої точки) [4]. До недоліків такого способу дослідження слід віднести те, що він є трудомістким і займає багато часу (виконання польових і камеральних робіт), а на точність результатів будуть впливати похибки, викликані зовнішніми умови (вертикальна рефракція, вплив температури на осьові системи нівеліра тощо) та кривизна Землі, виключення яких потребує додаткових розрахунків [1, 5]. Роботу фокусувального компонента зорової труби теодоліта (тахеометра) перевіряють шляхом спостерігання різновіддалених візирних цілей при двох положеннях вертикального круга. Про її правильність судять за зміною значень колімаційної похибки і місця нуля (місця зеніту), що отримують за результатами вимірювань кожної цілі, одна з яких повинна знаходитися у "нескінченності". Як цілі рекомендується використовувати візирні марки, сітки ниток коліматорів, що імітують різну віддаленість цілей, при цьому виникають труднощі одночасного задоволення умов їх розташування, точності вимірювань і зручності виконання повірки, особливо в лабораторних умовах. Навіть використання коліматорів, що імітують різну віддаленість цілей, обмежено в лабораторних умовах тим, що на близьких відстанях від теодоліта (тахеометра) важко забезпечити вимоги їх розташуванню по висоті і створу [6]. Також загальним недоліком існуючих способів дослідження руху фокусувального компонента зорових труб геодезичних приладів є те, що вони передбачають виконання візуальних спостережень, які призводять до похибок візування і відліку та виключають можливість автоматизувати процес дослідження [7]. Як аналог, вибраний за прототип, можна прийняти спосіб, заснований на спостереженні і фіксації зміни взаємного просторового положення сітки ниток приладу, що контролюється, та сіток ниток коліматора, що встановлені послідовно одна за одною, при цьому їх кількість вибирається за числом відстаней, які імітуються [4, 6]. Недоліком способу є те, що встановлення сіток ниток уздовж оптичної осі коліматора призводить до їх зміщення відносно осі, а обмежена кількість сіток не дозволяє досліджувати рух фокусувального компонента на всьому діапазоні його роботи. Задачею винаходу є створення способу, який дозволяє автоматично визначати горизонтальні та вертикальні зміщення візирної осі зорової труби геодезичних приладів внаслідок руху фокусувального компонента на всьому діапазоні його роботи в лабораторних умовах з підвищеною точністю. Поставлена задача вирішується за рахунок створення способу автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, заснованого на спостереженні і фіксуванні зміни взаємного просторового положення зображень індексів, які визначають оптичні осі, контролюючого і контрольованого приладів в єдиній системі світлових променів, що несуть зображення індексів, який відрізняється тим, що оптико-електронно контролюють фокусування зображення сітки ниток контрольованого приладу на фотоприймальній матриці контролюючого коліматора, за зворотним зв'язком керують механізмом фокусування коліматора і за відліками на фотоприймальній матриці для заданих значень відстаней фокусування визначають величини зміщення візирної осі контрольованого приладу на всьому діапазоні роботи його фокусувального компонента. 1 UA 104443 C2 5 10 15 20 25 30 35 40 45 50 55 Технічним результатом є можливість автоматично визначати горизонтальні та вертикальні зміщення візирної осі зорової труби геодезичних приладів внаслідок руху фокусувального компонента на всьому діапазоні його роботи в лабораторних умовах з підвищеною точністю. Функціональна схема пристрою, що реалізує запропонований спосіб, представлена на кресленні, де штрих-пунктирними стрілками позначені електричні зв'язки, суцільними - оптичні. 1 - геодезичний прилад, що контролюється; 2 - оправа оптичного блока; 3 - об'єктив пристрою, що контролює; 4 - джерело світла; 5 - плоско-паралельна пластина; 6 - напівпрозоре дзеркало; 7 - фото-приймальна матриця; 8 - трипельпризма; 9 - оправа трипельпризми; 10 - каретка; 11 - мікрометричний гвинт каретки; 12 - дзеркало; 13 - напрямні; 14 - механізм переміщення каретки; 15 - основа пристрою; 16 - блок обробки і аналізу зображень; 17 - блок індикації (дисплей); 18 - блок управління автофокусуванням; 19 - блок запису та збереження інформації. Дзеркало 12 та оптичний блок (2, 3, 5, 6) [8] жорстко закріплені на основі 15. Пристрій, за запропонованим способом, працює наступним чином. Оптична система пристрою фокусується на "нескінченність". Прилад, що контролюється 1, приводять в робочий стан і наводять на об'єктив 3. Джерело світла 4 підсвічує сітку ниток геодезичного приладу 1, зображення якої через об'єктив 3, напівпрозоре дзеркало 6, що знаходиться у плоскопаралельній пластині 5, та трипельпризму 8 потрапляє на дзеркало 12, де воно відбивається та знову потрапляє на трипельпризму 8, а з неї на напівпрозоре дзеркало 6, відбивається та проектується на фотоприймальну матрицю (наприклад, ПЗЗ-матрицю) 7. Зображення сітки ниток на фотоприймальній матриці перетворюється в електронний код і надходить до блока обробки і аналізу зображень 16 та блока управління автофокусуванням 18, який за відповідним алгоритмом визначає ступінь контрасту зображення і у випадку незадовільного контрасту цей блок дає команду механізму 14, котрий обертанням мікрометричного гвинта 11 переміщує у визначеному напрямку по напрямних 13 каретку 10, на якій встановлена трипельпризма 8, що кріпиться до каретки 10 за допомогою оправи 9 доти, доки зображення сітки ниток не досягне найкращого контрасту. В цей момент блок 18 дає команду блока 14 на зупинку та блока 16 запустити алгоритм обробки і аналізу зображень, за допомогою якого визначаються координати зображення сітки ниток (наприклад, субпіксельним способом [9]) на фотоприймальній матриці 7; ці координати приймаються за початкові. Оператор за допомогою кремальєрного гвинта геодезичного приладу 1 переміщує фокусувальний компонент (контролюючи відстань фокусування по дисплею 17) і запропонований пристрій виконує всі дії, що були описані вище (автофокусування зображення сітки ниток на фотоприймальній матриці 7 та визначення її координат). Таким чином, переміщуючи фокусувальний компонент по всьому діапазону його роботи, визначають координати зображень сіток ниток на фотоприймальній матриці 7. Зміщення візирної осі внаслідок перефокусування визначають за зміною положення (за різницею координат) зображення сітки ниток на мішені фотоприймальної матриці 7 при різних положеннях фокусувального компонента відносно початкового положення (початкових координат). Результати аналізу і обробки зображень з блока 16 надходять до блока 19, де вони записуються та зберігаються та до блока індикації 17, з якого оператор візуально зчитує інформацію про виконане дослідження. Таким чином, запропонований спосіб дозволяє автоматично визначати горизонтальні та вертикальні зміщення візирної осі зорової труби геодезичних приладів внаслідок руху фокусувального компонента на всьому діапазоні його роботи в лабораторних умовах з підвищеною точністю. 2 UA 104443 C2 5 10 15 20 Джерела інформації: 1. Островський А. Л. Геодезія. Ч. 2: [підручник для вузів] / А. Л. Островський, А. І. Мороз, В. Л. Тарнавський. - Львів: НУ "Львівська політехніка", 2007. - С. 53-60. 2. Островский А. Л. Геодезическое прибороведение / А. Л. Островский, Д. И. Маслич, В. Г. Гребенюк. - Львов: Высшая школа. Изд-во при Львов, ун-те, 1983. - С. 181-186. 3. Захаров А. И. Геодезические приборы: Справочник / А. И. Захаров. - М.: Недра, 1989. - С. 10-13. 4. Шевченко Т. Г. Геодезичні прилади: Підручник / Шевченко Т. Г., Мороз О. I., Тревого I. С; за редакцією Т. Г. Шевченка. - Львів: Видавництво НУ "Львівська політехніка", 2006. - С. 333335. 5. Елисеев С. В. Геодезические инструменты и приборы. Основы расчета, конструкции и особенности изготовления / Елисеев С. В. - [3-е изд., перераб. и доп.]. - М.: Недра, 1973. - С. 5960. 6. Зимин В. М. Коллиматор для проверки работы фокусирующей линзы трубы теодолита / В. М. Зимин // Геодезия и картография. - 1984. - № 7. - С. 17-18. 7. Справочник по инженерной геодезии / [Баран П. И., Видуев Н. Г., Войтенко С. П. и др.]; под общ. ред. Н. Г. Видуева. - К.: издательское объединение "Вища школа", головное изд-во, 1978. - С. 64-69. 8. Бурачек В. Г. Оптичний блок для одержання зображення віддалених предметів / Бурачек В. Г., Гончаренко О. С, Крячок С. Д. // Інженерна геодезія. - 2002. - №. 47. - С. 20-22. 9. Деклараційний патент України на корисну модель 32103, МПК (2006), G01C 11/00. Спосіб візування цифровою камерою / Бурачек В. Г., Мамонтова Л. С, Нисторяк І. О.; заявник та патентовласник ЧДІЕіУ. - № 200711389; заявл. 15.10.2007; опубл. 12.05.2008, Бюл. № 9. 25 ФОРМУЛА ВИНАХОДУ 30 35 Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, заснований на спостереженні і фіксуванні зміни взаємного просторового положення зображень індексів, які визначають оптичні осі, контролюючого і контрольованого приладів в єдиній системі світлових променів, що несуть зображення індексів, який відрізняється тим, що оптико-електронно контролюють фокусування зображення сітки ниток контрольованого приладу на фотоприймальній матриці контролюючого коліматора, за зворотним зв'язком керують механізмом фокусування коліматора і за відліками на фотоприймальній матриці для заданих значень відстаней фокусування визначають величини зміщення візирної осі контрольованого приладу на всьому діапазоні роботи його фокусувального компонента. 3 UA 104443 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюBurachek Vsevolod Hermanovych, Khomushko Dmytro Valeriiovych
Автори російськоюБурачек Всеволод Германович, Хомушко Дмитрий Валериевич
МПК / Мітки
МПК: G01C 15/00
Мітки: осі, горизонтальних, візирної, перефокусуванні, спосіб, трубі, зміщень, вертикальних, автоматичного, зорової, геодезичних, контролю, приладів
Код посилання
<a href="https://ua.patents.su/6-104443-sposib-avtomatichnogo-kontrolyu-gorizontalnikh-ta-vertikalnikh-zmishhen-vizirno-osi-zorovo-trubi-geodezichnikh-priladiv-pri-perefokusuvanni.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні</a>
Спосіб візування зоровими трубами геодезичних приладів
Номер патенту: 86562
Опубліковано: 27.04.2009
Автори: Шевченко Тарас Георгієвич, Літинський Володимир Осипович, Літинський Святослав Володимирович
МПК: G01C 5/00
Мітки: трубами, візування, спосіб, зоровими, геодезичних, приладів
Формула / Реферат:
Спосіб візування зоровими трубами геодезичних приладів, який полягає у тому, що наводять зорову трубу геодезичного приладу на ціль, суміщають з візирною ціллю відповідний штрих сітки ниток і відлічують кутомірні кола чи рейку, який відрізняється тим, що за окуляром зорової труби на її оптичній осі додатково встановлюють цифровий носій інформації, наприклад цифрову відеокамеру, за умови розташування її об'єктива у задній фокусній площині...
Спосіб визначення похибки перефокусування зорових труб геодезичних приладів
Номер патенту: 66668
Опубліковано: 17.05.2004
Автори: Новосад Володимир Миколайович, Островський Аполлінарій Львович, Шевченко Тарас Георгійович
МПК: G01C 5/00
Мітки: спосіб, перефокусування, зорових, похибки, труб, приладів, визначення, геодезичних
Формула / Реферат:
Спосіб визначення похибки перефокусування зорових труб геодезичних приладів, що включає встановлення приладу, відлік рейок, розміщених у точках, розташованих на однаковій віддалі від приладу, переставлення приладу в одну із точок встановлення рейки і відлік рейок, розташованих на різних віддалях від приладу, визначення похибок, що впливають на результати вимірювань, введення їх у вигляді поправок у результати вимірювань і визначення похибки...
Спосіб автоматичного контролю якості зображення, що створюється об’єктивами геодезичних та аерофотознімальних оптичних систем
Номер патенту: 96554
Опубліковано: 10.11.2011
Автори: Бурачек Всеволод Германович, Беленок Вадим Юрійович, Хомушко Дмитро Валерійович
МПК: G01C 11/00
Мітки: зображення, контролю, створюється, аерофотознімальних, якості, об'єктивами, оптичних, автоматичного, спосіб, систем, геодезичних
Формула / Реферат:
Спосіб автоматичного контролю якості зображення, що створюються об'єктивами геодезичних та аерофотознімальних оптичних систем, заснований на релеєвській інтерпретації оцінки якості оптичної системи, що базується на аналізі зображення двох точкових світних об'єктів, який відрізняється тим, що на екрані проекційного дисплея формують два точкові світні об'єкти з заданим по напрямку вимірювання інтервалом між ними, колімують їх зображення та...
Спосіб визначення похибки перефокусування зорових труб геодезичних приладів
Номер патенту: 84107
Опубліковано: 10.09.2008
Автори: Літинський Святослав Володимирович, Кіселик Оксана Володимирівна, Літинський Володимир Осипович, Шевченко Тарас Георгієвич
МПК: G01C 5/00
Мітки: приладів, труб, спосіб, визначення, перефокусування, геодезичних, похибки, зорових
Формула / Реферат:
Спосіб визначення похибки перефокусування зорових труб геодезичних приладів, згідно з яким встановлюють прилад і рейку на сталій віддалі і відлічують рейку, змінюють довжину візирного променя до рейки, відлічують рейку, визначають похибки, що впливають на результати вимірювань, зокрема за вертикальну рефракцію, і визначають похибку перефокусування зорової груби, який відрізняється тим, що додатково встановлюють прямовисно плоский дзеркальний...
Пристрій для установки і центрування візирної труби на фланці вала
Номер патенту: 91466
Опубліковано: 26.07.2010
Автор: Багно Анатолій Миколайович
Мітки: установки, трубі, фланці, візирної, вала, центрування, пристрій
Формула / Реферат:
1. Пристрій для установки і центрування візирної труби на фланці вала, що містить фланець із закріпленим на ньому кронштейном, на якому закріплені опори для кріплення візирної труби, який відрізняється тим, що торцева поверхня фланця оснащена по його осі центруючим конусним виступом, відповідним розмірам базового технологічного центрового отвору на фланці суднового вала.2. Пристрій за п. 1, який відрізняється тим, що кронштейн,...
Попередній патент: Спосіб корекції цифрових зображень
Наступний патент: Пристрій для автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні
Випадковий патент: Спосіб вимірювання фазоамплітудної похибки пристрою