Спосіб визначення місцеположення та швидкості з використанням кодових гнсс-вимірювань і тривимірної карти місцевості
Номер патенту: 105960
Опубліковано: 10.07.2014
Автори: Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна, Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Галевич Максим Миколайович
Формула / Реферат
Спосіб визначення місцеположення та швидкості з використанням кодових ГНСС-вимірювань, при якому координати місцеположення визначають у точці перетину поверхонь місцеположень, які являють собою сфери із центром, співпадаючим із фазовим центром антени супутника, та радіусом, що дорівнює кодовій відстані, яка вимірюється між навігаційним приймачем рухомого об'єкта й кожним навігаційним супутником, а швидкість об'єкта визначають з вектора швидкості, обчисленого за допплерівським зсувом частоти навігаційного сигналу, який відрізняється тим, що додають додаткову поверхню місцеположення, яка являє собою поверхню місцевості й будується шляхом інтерполяції інформації про рельєф місцевості, залученої із тривимірної карти місцевості, в якій знаходиться рухомий об'єкт, та додають додаткову умову щодо положення вектора швидкості об'єкта, яка полягає у тому, що вектор швидкості належить до площини, дотичної до поверхні руху об'єкта у точці його поточного місцеположення.
Текст
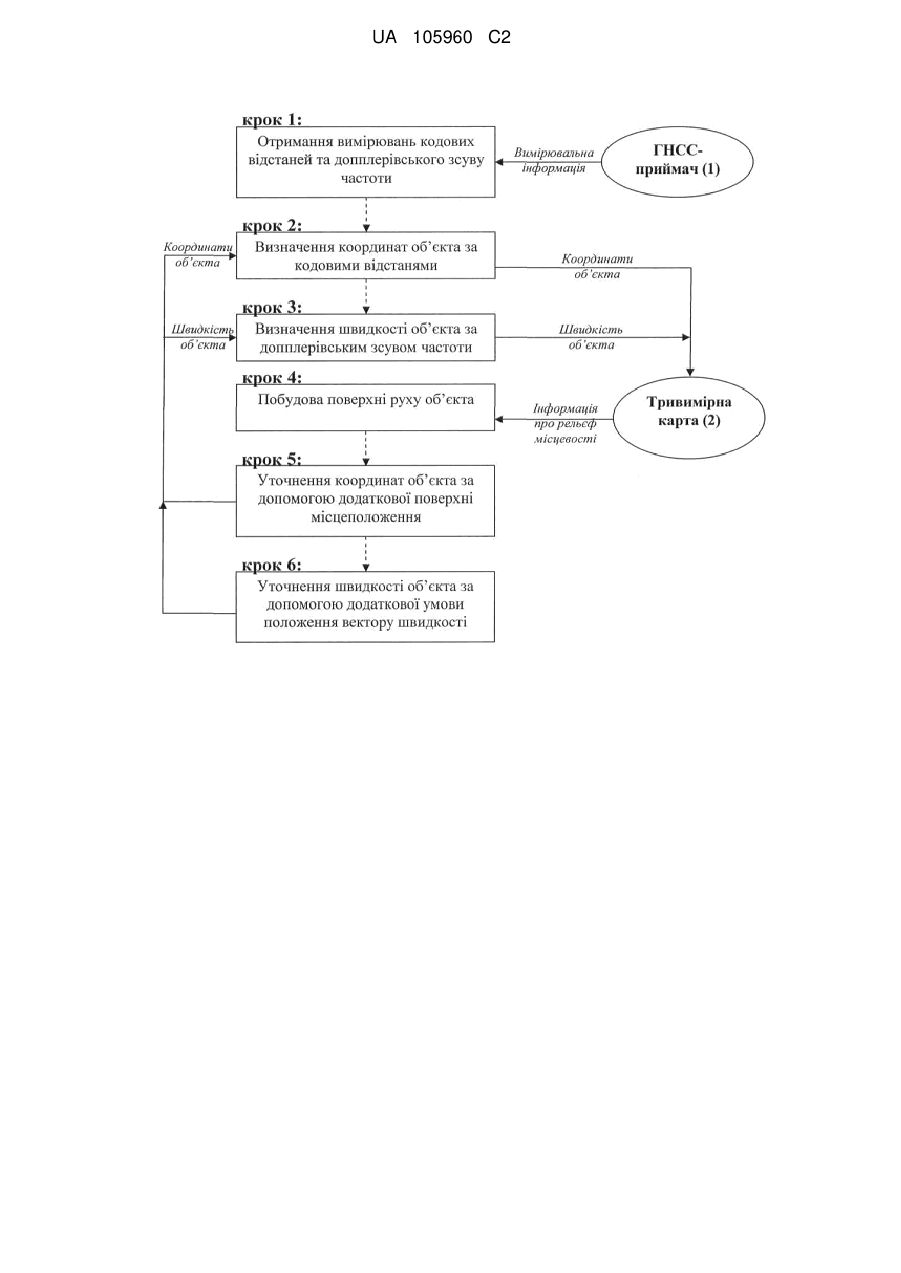
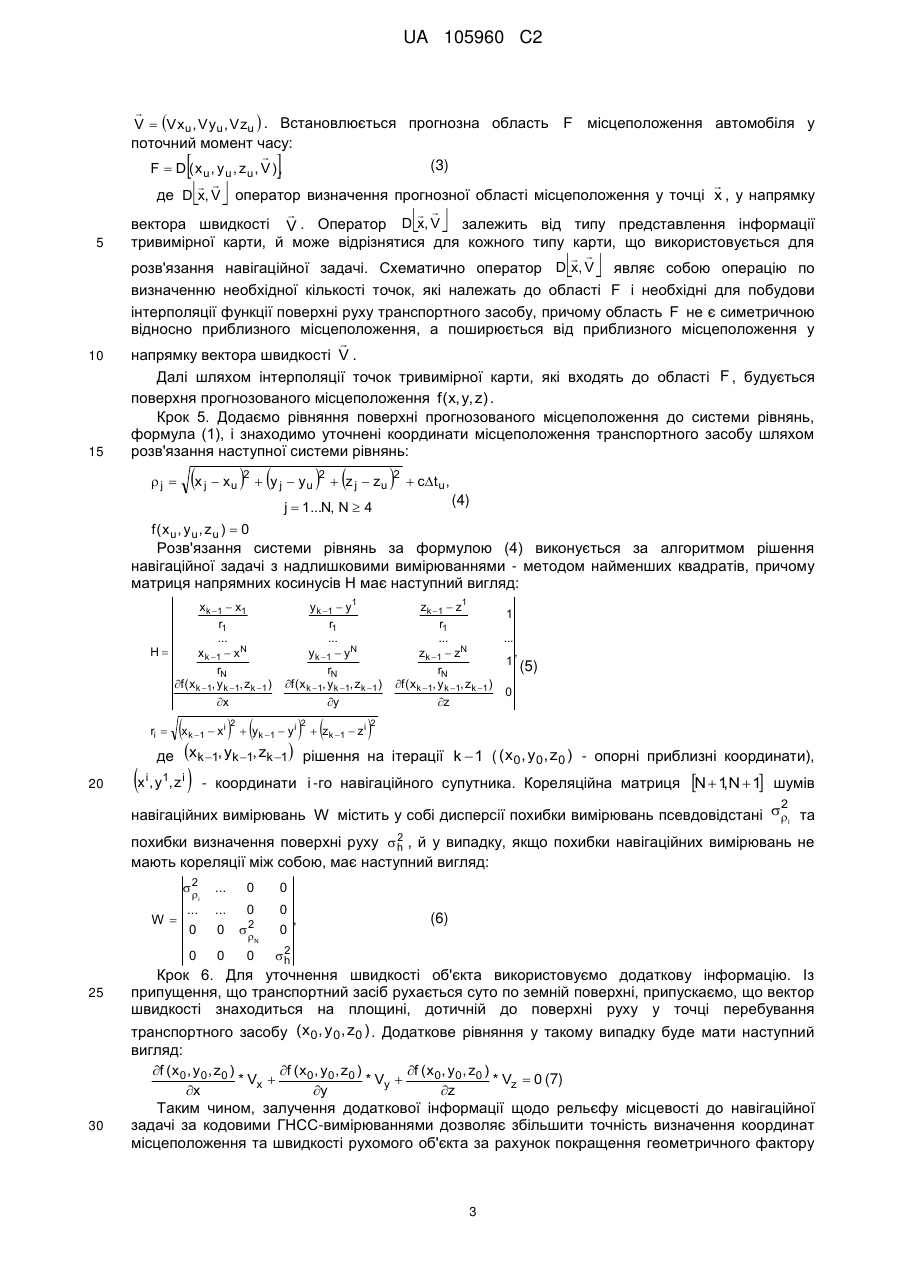
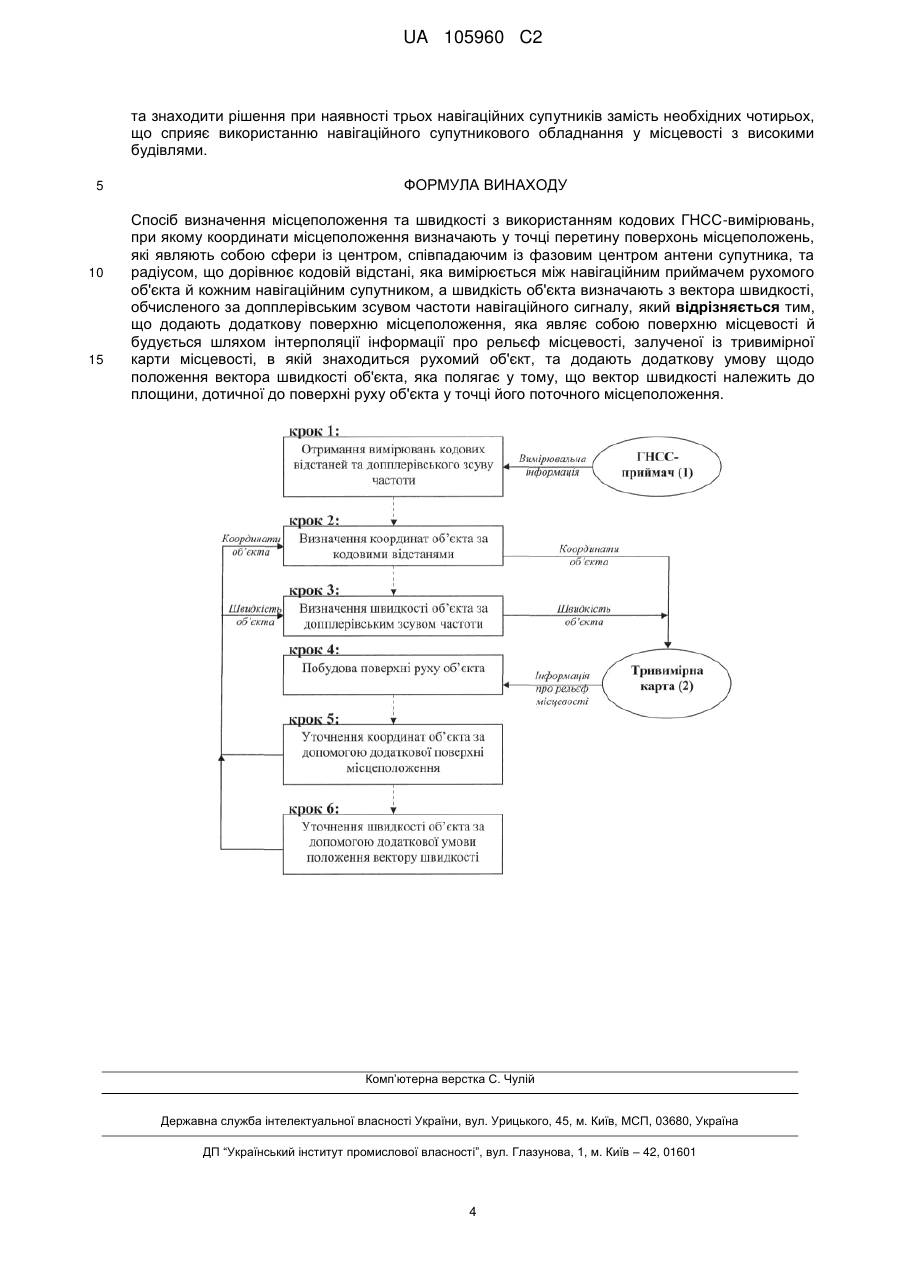
Реферат: Спосіб визначення місцеположення та швидкості з використанням кодових ГНСС-вимірювань і тривимірної карти місцевості належить до систем супутникової навігації та може бути використаний в системах моніторингу статичних й рухомих об'єктів, які знаходяться на земній поверхні. Згідно зі способом, визначення координат об'єкта здійснюється у два етапи. На першому етапі визначається швидкість та приблизне місцеположення об'єкта, яке отримується через рішення навігаційної задачі за кодовими відстанями. На другому етапі, на підставі швидкості та приблизного місцеположення об'єкта, із тривимірної карти вибирається необхідна область місцевості й будується рівняння поверхні рельєфу місцевості, яке додається до навігаційної задачі, результатом рішення якої є уточнені координати рухомого об'єкта. Також на другому етапі уточнюється швидкість рухомого об'єкта: до задачі визначення швидкості додається додаткова умова знаходження вектора швидкості на площині, дотичній до поверхні руху об'єкта у точці його поточного місцеположення. Завдяки реалізації пропонованого способу забезпечується підвищення точності визначення координат та швидкості рухомого об'єкта, що дозволяє підвищити ефективність різноманітних дорожніх застосувань. UA 105960 C2 (12) UA 105960 C2 UA 105960 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до систем супутникової навігації та може бути використаний в системах моніторингу статичних й рухомих об'єктів, які знаходяться на земній поверхні. Система глобального позиціонування (GPS) має велике розповсюдження при визначенні просторових координат місцеположення як для рухомих, так і для статичних об'єктів. До складу GPS входять космічні супутники, які обертаються навколо Землі й генерують та випромінюють радіосигнал. Радіосигнал містить інформацію стосовно часу його випромінювання, інформацію про місцеположення супутника та ідентифікаційні дані, які унікальні для кожного супутника. Навігаційні прилади GPS приймають ці радіосигнали та визначають своє місцеположення на підставі їх інформації. Так навігаційні прилади розраховують відстань до кожного супутника через час розповсюдження сигналу (різниця між часом прийому та випромінювання сигналу) та швидкість його розповсюдження - швидкість світла. Інформація радіосигналу щодо місцеположення супутника використовується для припущення, що навігаційний прилад знаходиться на сфері із радіусом, який дорівнює відстані до навігаційного супутника, та центром у точці місцеположення цього супутника. Найближча до земної поверхні точка перетину трьох сфер, які являють собою поверхні місцеположення навігаційного приймача від трьох різних навігаційних супутників, і є точка місцеположення об'єкта. Але шкали часу годинників супутників та навігаційного приймача відрізняються, що суттєво впливає на вимірювання відстані між навігаційним приймачем та супутником. Тому з метою синхронізації часу до трьох сфер додають ще четверту. Таким чином, для визначення місцеположення об'єкта, який обладнано навігаційним приймачем, у просторі, необхідно мати вимірювання від чотирьох навігаційних супутників. Обчислене таким чином місцеположення зазвичай значно відрізняється від дійсного місцеположення об'єкта. Причини цього полягають у таких факторах, як точність координат навігаційних супутників, точність вимірів відстаней між приймачем і супутником та геометрія розташування супутників. Існує багато способів та технологій, які дозволяють зменшити вплив наведених факторів на точність визначення місцеположення. У системах моніторингу рухомих об'єктів місцеположення об'єктів постійно змінюється, тому для цих систем дуже важливим й суттєвим є фактор геометричного розташування супутників. Так у випадках гірського рельєфу чи міських висотних будівель одночасно спостерігати чотири навігаційні супутники досить часто є проблемою. А якщо у цих умовах і вдається спостерігати необхідну кількість супутників, то досить часто виникає проблема з їх геометричним розташуванням: висока концентрація їх розташування у якійсь невеликій ділянці небесної півкулі, що призводить до суттєвих похибок у визначенні місцеположення. Шляхи вирішення цієї проблеми полягають у залученні додаткової інформації, яка зазвичай надається такими різноманітними приладами, як акселерометр (датчик лінійного прискорення), гіроскоп (датчик кутової швидкості), магнітометр (визначення магнітного поля), одометр (визначення відстані, яку пройдено) та ін.. Ця додаткова інформація інтегрується до супутникових навігаційних вимірювань й обчислюються координати місцеположення об'єкта, як правило за допомогою фільтра Калмана. Відомий спосіб підвищення точності визначення місцеположення рухомого об'єкта на, або поруч земної поверхні, за допомогою GPS [Патент США № 6,055,477 МПК G05D 1/00, опублікований 25.04.2000]. В цьому способі координата висоти, яка отримується з використанням GPS, інтегрується із значенням висоти, яке отримується з альтиметра або барометра, за допомогою фільтру Калмана або методу найменших квадратів чи порівняння статистичних параметрів похибок цих параметрів. Як результат, при уточненні координати висоти збільшується точність визначення й горизонтальних координат. Найближчим за технічною суттю до пропонованого винаходу є спосіб використання карти висот для підвищення точності оцінки навігаційної системи [Патент США № 4,939,663 МПК G01C 21/00 (2006.01), опублікований 3.07.1990]. Цей спосіб корекції визначення місцеположення навігаційної системи об'єкта засновано на використанні тривимірної цифрової карти місцевості, внаслідок чого обчислювальна траєкторія руху стає більш ближчою до дійсної траєкторії. Під час руху альтиметр зчитує фазу та формує значення висоти, яка являє собою актуальну висоту місцевості, в якій знаходиться об'єкт. Ця висота надалі використовується як вхідна інформація для цифрової карти, із якої отримуються контурні ізолінії відповідних висот. Оцінка позиції навігаційної системи належить до часу, коли альтиметр визначає значення висоти. Різниця оцінки позиції навігаційної системи та географічної позиції на контурній лінії використовується для корекції позиції об'єкта. Використання додаткових навігаційних приладів збільшує точність визначення місцеположення об'єкта, але поряд з цим, розглянуті аналоги мають наступні, пов'язані з суттєвим збільшенням складності та вартості навігаційних заходів, властивості: 1 UA 105960 C2 5 10 15 20 25 30 35 40 додаткові похибки інерційних приладів, що додає значної складності алгоритмам обчислення координат місцеположення; додаткові витрати на придбання та утримання в належному стані додаткових навігаційних приладів, їх постійне калібрування; конструкторське переобладнання рухомих об'єктів для встановлення додаткових навігаційних приладів. Тож актуальною є задача зменшення складності й вартості заходів для збільшення точності визначення місцеположення та швидкості рухомого об'єкта з використанням кодових ГНССвимірювань. Технічною задачею винаходу є підвищення точності визначення координат місцеположення та швидкості будь-якого рухомого об'єкта, який обладнано апаратурою ГНСС-спостережень та який рухається суто по земній поверхні та структурових елементах дорожньо-транспортної інфраструктури (мости, тунелі, багаторівневі шляхові розв'язки та ін.), в будь-який момент часу за допомогою кодових ГНСС-вимірювань лише із залученням додаткової інформації із тривимірної карти місцевості без додаткових навігаційних та інерційних приладів. Ця задача вирішена таким чином. При визначенні місцеположення та швидкості з використанням кодових ГНСС-вимірювань, при якому координати місцеположення визначаються у точці перетину поверхонь місцеположень, які являють собою сфери із центром, співпадаючим із фазовим центром антени супутника, та радіусом, що дорівнює кодовій відстані, яка вимірюється між навігаційним приймачем рухомого об'єкта й кожним навігаційним супутником, а швидкість об'єкта визначається за допплерівським зсувом частоти навігаційного сигналу, згідно з винаходом, навігаційна задача вирішується із додаванням додаткової поверхні місцеположення, яка являє собою поверхню місцевості й будується шляхом інтерполяції інформації про рельєф місцевості, залученої із тривимірної карти місцевості, в якій знаходиться рухомий об'єкт, та додаванням додаткової умови щодо положення вектору швидкості об'єкта, яка полягає у тому, що вектор швидкості належить до площини, дотичної до поверхні руху об'єкта у точці його поточного місцеположення. На кресленні зображено алгоритм способу визначення місцеположення та швидкості з використанням кодових ГНСС-вимірювань і тривимірної карти місцевості. Розглянемо більш детальніше спосіб, що заявляється. Крок 1. Для здійснення способу необхідно від ГНСС-приймача 1 отримати вимірювання кодових відстаней та допплерівського зсуву частоти. Крок 2. Якщо це перший момент визначення координат транспортного засобу та в моменти, які є першими після суттєвої перерви навігаційних спостережень, яка може бути викликана перешкоджаючими умовами довкілля (будівлі, густа висока рослинність, активні радіоперешкоди та ін.), приблизні координати місцеположення обчислюються з використанням кодових ГНСС-вимірювань, отриманих від ГНСС-приймача 1, без додаткових умов (виконується розв'язання системи рівнянь, які наведено у формулі (1), за умови спостереження чотирьох або більше навігаційних супутників.). У інші моменти приблизні координати встановлюються рівними координатам, отриманим в попередній момент часу на кроці 5. j x j xu 2 y j yu 2 z j zu 2 ctu, (1) j 1...N Крок 3. За формулою (2), з використанням вимірів допплерівського зсуву частоти обчислюється вектор швидкості Vu . D1j D1j * 1 C * V j C * Vu , де j 1...N, x u x j y u y j zu z j C R , R , R , R 45 (2) x j x u 2 y j yu 2 z j zu 2 , де 1 - довжина несучої хвилі на частоті L1, яка становить 0.19м, Vj Vxj, Vy j, Vzj - вектор швидкості j-то навігаційного супутника Крок 4. Із тривимірної карти 2 залучається інформація щодо рельєфу довкілля відносно приблизного місцеположення транспортного засобу xu , yu , zu та напрямку вектора швидкості 2 UA 105960 C2 V Vxu , Vyu , Vzu . Встановлюється прогнозна область F місцеположення автомобіля у поточний момент часу: (3) F D ( x u , y u , zu , V ) , де D x, V оператор визначення прогнозної області місцеположення у точці x , у напрямку вектора швидкості V . Оператор D x, V залежить від типу представлення інформації тривимірної карти, й може відрізнятися для кожного типу карти, що використовується для розв'язання навігаційної задачі. Схематично оператор D x, V являє собою операцію по 5 10 15 визначенню необхідної кількості точок, які належать до області F і необхідні для побудови інтерполяції функції поверхні руху транспортного засобу, причому область F не є симетричною відносно приблизного місцеположення, а поширюється від приблизного місцеположення у напрямку вектора швидкості V . Далі шляхом інтерполяції точок тривимірної карти, які входять до області F , будується поверхня прогнозованого місцеположення f ( x, y, z) . Крок 5. Додаємо рівняння поверхні прогнозованого місцеположення до системи рівнянь, формула (1), і знаходимо уточнені координати місцеположення транспортного засобу шляхом розв'язання наступної системи рівнянь: x j xu 2 y j yu 2 z j zu 2 ctu, j (4) j 1...N, N 4 f ( x u , y u , zu ) 0 Розв'язання системи рівнянь за формулою (4) виконується за алгоритмом рішення навігаційної задачі з надлишковими вимірюваннями - методом найменших квадратів, причому матриця напрямних косинусів Н має наступний вигляд: y k 1 y1 r1 ... y k 1 y N rN f ( x k 1, y k 1, zk 1) y x k 1 x1 r1 ... H x k 1 x N rN f ( x k 1, y k 1, zk 1) x ri де 20 x k 1 1 y 2 k 1 yi xk 1, yk 1, zk 1 x , y , z i xi z 2 k 1 z zk 1 z1 1 r1 ... ... , zk 1 zN 1 (5) rN f ( x k 1, y k 1, zk 1) 0 z i 2 рішення на ітерації k 1 ( ( x 0 , y 0 , z0 ) - опорні приблизні координати), , - координати i -го навігаційного супутника. Кореляційна матриця N 1 N 1 шумів i 2 навігаційних вимірювань W містить у собі дисперсії похибки вимірювань псевдовідстані i та 2 похибки визначення поверхні руху h , й у випадку, якщо похибки навігаційних вимірювань не мають кореляції між собою, має наступний вигляд: 2 W ... 0 0 25 i ... 0 ... 0 2 0 N 0 0 0 0 , 0 (6) 2 h Крок 6. Для уточнення швидкості об'єкта використовуємо додаткову інформацію. Із припущення, що транспортний засіб рухається суто по земній поверхні, припускаємо, що вектор швидкості знаходиться на площині, дотичній до поверхні руху у точці перебування транспортного засобу ( x 0 , y 0 , z0 ) . Додаткове рівняння у такому випадку буде мати наступний вигляд: f ( x 0 , y 0 , z0 ) f ( x 0 , y 0 , z0 ) f ( x 0 , y 0 , z0 ) * Vx * Vy * Vz 0 (7) x y z 30 Таким чином, залучення додаткової інформації щодо рельєфу місцевості до навігаційної задачі за кодовими ГНСС-вимірюваннями дозволяє збільшити точність визначення координат місцеположення та швидкості рухомого об'єкта за рахунок покращення геометричного фактору 3 UA 105960 C2 та знаходити рішення при наявності трьох навігаційних супутників замість необхідних чотирьох, що сприяє використанню навігаційного супутникового обладнання у місцевості з високими будівлями. 5 10 15 ФОРМУЛА ВИНАХОДУ Спосіб визначення місцеположення та швидкості з використанням кодових ГНСС-вимірювань, при якому координати місцеположення визначають у точці перетину поверхонь місцеположень, які являють собою сфери із центром, співпадаючим із фазовим центром антени супутника, та радіусом, що дорівнює кодовій відстані, яка вимірюється між навігаційним приймачем рухомого об'єкта й кожним навігаційним супутником, а швидкість об'єкта визначають з вектора швидкості, обчисленого за допплерівським зсувом частоти навігаційного сигналу, який відрізняється тим, що додають додаткову поверхню місцеположення, яка являє собою поверхню місцевості й будується шляхом інтерполяції інформації про рельєф місцевості, залученої із тривимірної карти місцевості, в якій знаходиться рухомий об'єкт, та додають додаткову умову щодо положення вектора швидкості об'єкта, яка полягає у тому, що вектор швидкості належить до площини, дотичної до поверхні руху об'єкта у точці його поточного місцеположення. Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюDokhov Oleksandr Ivanovych, Lukianov Oleksandr Mykhailovych, Hrinchenko Olena Volodymyrivna, Lukianova Olha Oleksiivna
Автори російськоюДохов Александр Иванович, Лукьянов Александр Михайлович, Гринченко Елена Владимировна, Лукьянова Ольга Алексеевна
МПК / Мітки
МПК: G09B 29/00, G05D 1/00, G06F 17/00, G01C 21/00
Мітки: визначення, спосіб, гнсс-вимірювань, тривимірної, кодових, карти, місцевості, використанням, місцеположення, швидкості
Код посилання
<a href="https://ua.patents.su/6-105960-sposib-viznachennya-miscepolozhennya-ta-shvidkosti-z-vikoristannyam-kodovikh-gnss-vimiryuvan-i-trivimirno-karti-miscevosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцеположення та швидкості з використанням кодових гнсс-вимірювань і тривимірної карти місцевості</a>
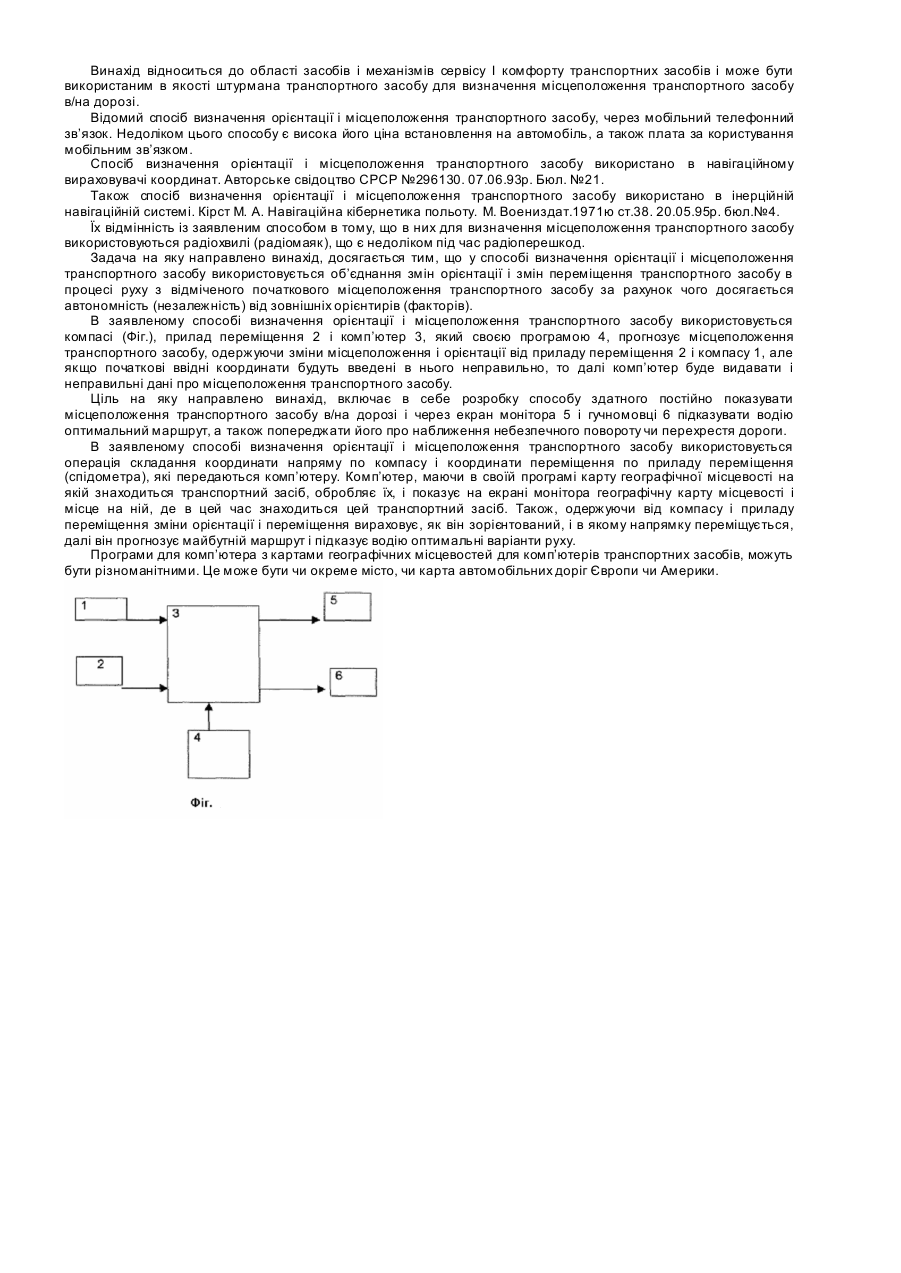
Спосіб визначення орієнтації і місцеположення транспортного засобу
Номер патенту: 64162
Опубліковано: 16.02.2004
Автор: Гайдук Павло Миколайович
МПК: G01C 23/00, G01C 21/00
Мітки: орієнтації, визначення, спосіб, місцеположення, транспортного, засобу
Формула / Реферат:
Спосіб визначення орієнтації і місцеположення транспортного засобу, що полягає в визначенні місцеположення транспортного засобу на географічній карті, який відрізняється тим, що відмічають початкове місцеположення транспортного засобу на географічній карті, введеній у комп’ютер, та визначають його орієнтацію відносно сторін світу, а в процесі руху транспортного засобу зміни його місцеположення і орієнтації передають в комп’ютер, і одержують...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Герасименко Володимир Вікторович, Слєпов Лев Іванович, Блаженний Валерій Іванович, Щипанський Павло Володимирович
МПК: G01S 5/10
Мітки: апарата, місцеположення, спосіб, визначення, літального
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб визначення плоских прямокутних координат контурних точок місцевості
Номер патенту: 60941
Опубліковано: 25.06.2011
Автори: Кравченко Юрій Васильович, Брезіцький Едуард Юрійович, Пермяков Олександр Юрійович, Машталір Вадим Віталійович, Чорнокнижний Олександр Анатолійович, Федченко Олексій Петрович, Савченко Віталій Анатолійович, Шевченко Олексій Васильович, Примаченко Костянтин Володимирович
МПК: G01S 5/02
Мітки: точок, спосіб, координат, визначення, контурних, плоских, місцевості, прямокутних
Формула / Реферат:
Спосіб визначення плоских прямокутних координат контурних точок місцевості, при якому вибирають растровий знімок аерокосмічного фотографування, завантажують знімок аерокосмічного фотографування у цифрову фотограмметричну станцію, здійснюють вимірювання плоских прямокутних координат контурних точок місцевості на растровому знімку аерокосмічного фотографування цифровою фотограмметричною станцією, який відрізняється тим, що додатково...
Спосіб і пристрій підтримки послуг визначення місцеположення із вдосконаленим рівнем послуги визначення місцеположення
Номер патенту: 103394
Опубліковано: 10.10.2013
Автори: Едж Стефен В., Вахтер Андреас К.
МПК: H04W 4/20, H04L 29/08, H04W 4/02
Мітки: місцеположення, пристрій, послуги, рівнем, визначення, вдосконаленим, послуг, спосіб, підтримки
Формула / Реферат:
1. Спосіб отримання послуги визначення місцеположення, що містить етапи, на яких:обмінюються щонайменше одним повідомленням між терміналом і сервером визначення місцеположення один раз для встановлення розширеного сеансу визначення місцеположення визначеної тривалості, включаючи етапи, на яких: відправляють перше повідомлення від термінала на сервер визначення місцеположення для ініціювання встановлення розширеного сеансу...
Спосіб однозначного визначення місцеположення об’єкта на площині
Номер патенту: 45179
Опубліковано: 26.10.2009
Автори: Сівак Вадим Анатолійович, Шинкарук Олег Миколайович, Лисий Микола Іванович, Солонніков Владислав Григорович
МПК: G01S 5/00, G08B 13/00
Мітки: спосіб, однозначного, визначення, об'єкта, площині, місцеположення
Формула / Реферат:
Спосіб однозначного визначення місцеположення об'єкта на площині, який базується на визначенні пеленга об'єкта тріадою ненаправлених пасивних датчиків, який відрізняється тим, що шукане однозначне місцеположення об'єкта, у вигляді лінійних координат, визначають як точку перетину двох гіпербол і пеленга, які є лініями положення об'єкта.
Попередній патент: 7-[2-(4-етилпіперазин-1-іл)етокси]-2-метил-3-(4-хлорофеніл)-4н-хромен-4-он та його застосування
Наступний патент: Спосіб розділення кольорів цифрового зображення на дві кольорові і чорну фарби для друкування чотирма та більше фарбами
Випадковий патент: Спосіб обробки привибійної зони карбонатного колектора