Спосіб однозначного визначення місцеположення об’єкта на площині
Номер патенту: 45179
Опубліковано: 26.10.2009
Автори: Лисий Микола Іванович, Шинкарук Олег Миколайович, Солонніков Владислав Григорович, Сівак Вадим Анатолійович

Формула / Реферат
Спосіб однозначного визначення місцеположення об'єкта на площині, який базується на визначенні пеленга об'єкта тріадою ненаправлених пасивних датчиків, який відрізняється тим, що шукане однозначне місцеположення об'єкта, у вигляді лінійних координат, визначають як точку перетину двох гіпербол і пеленга, які є лініями положення об'єкта.
Текст
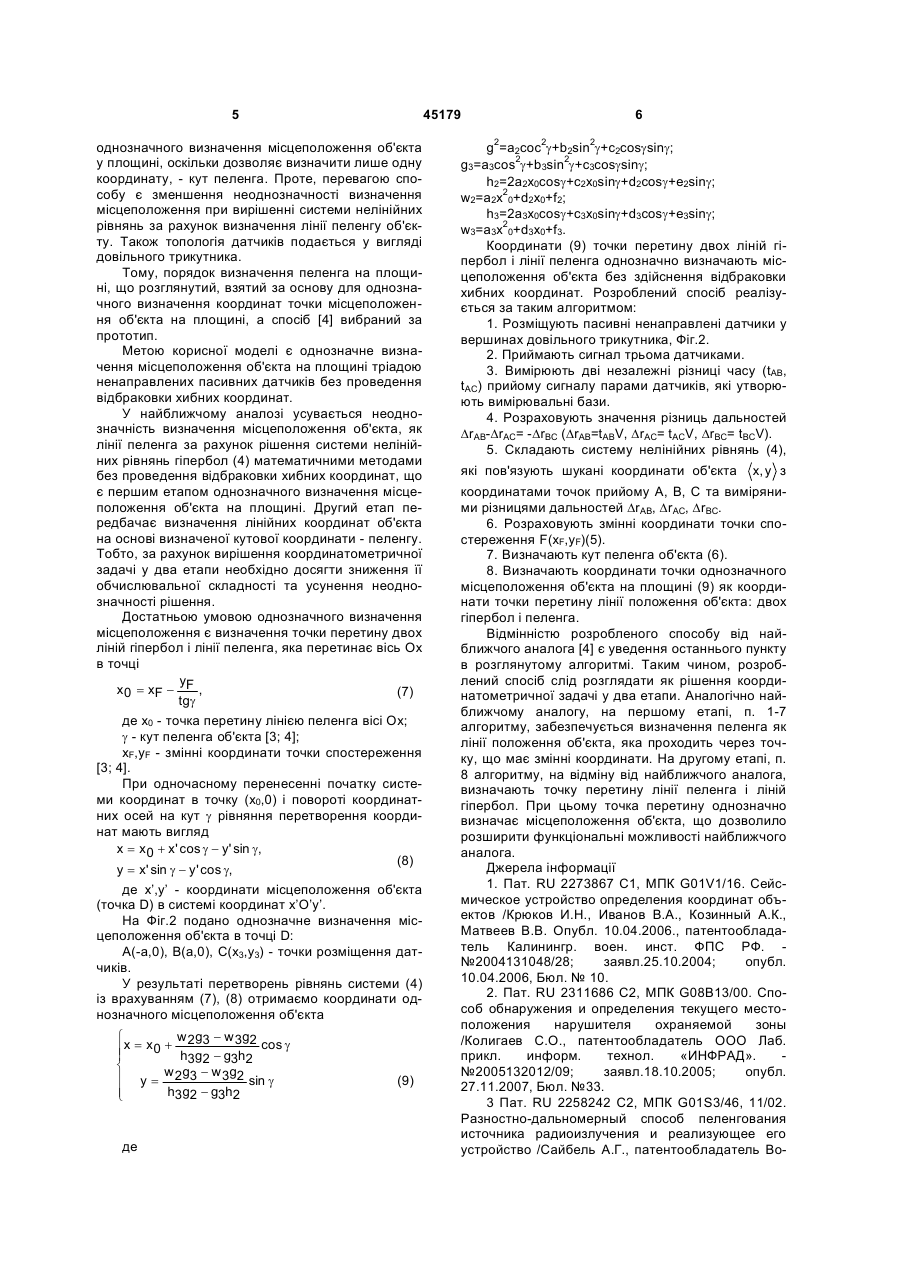
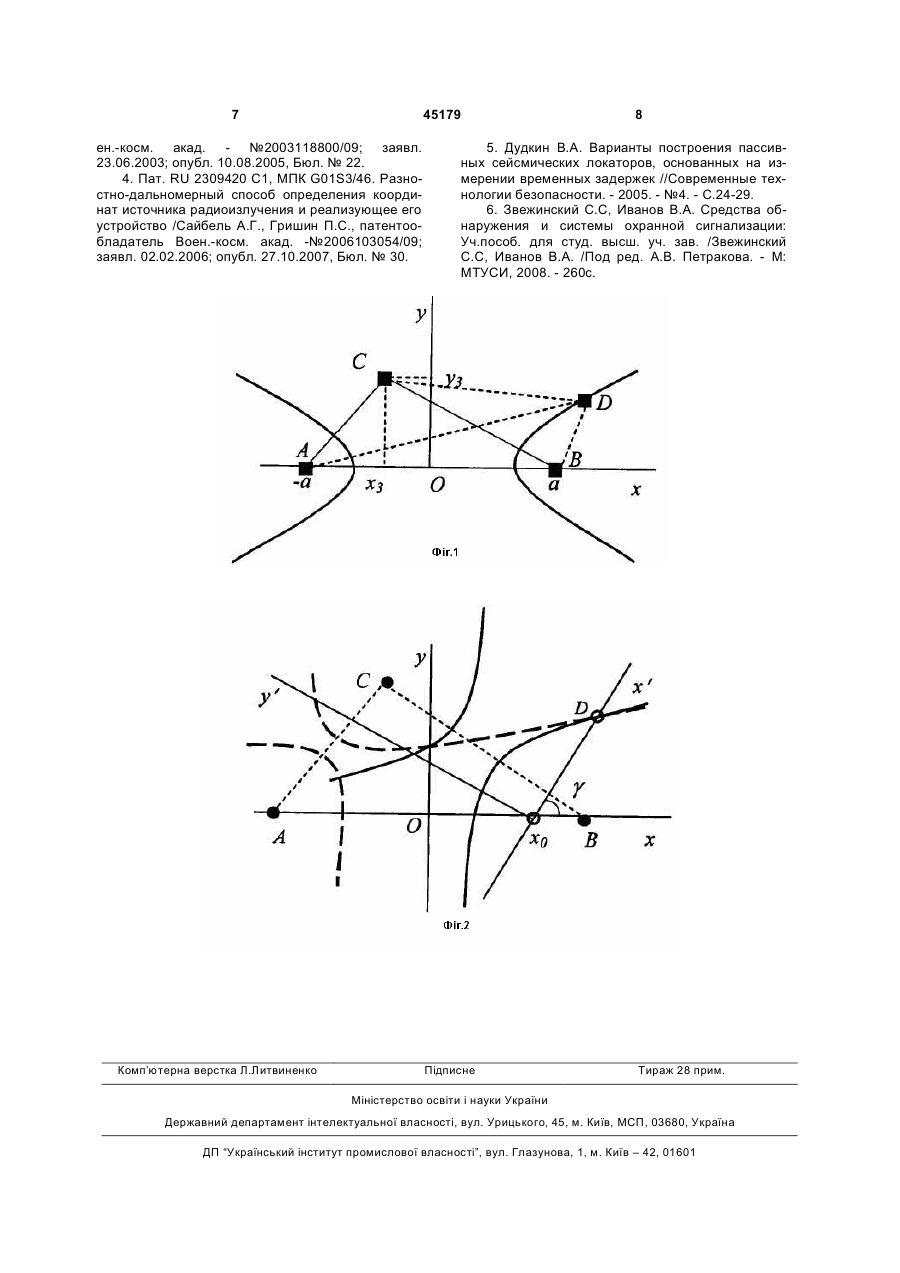
Спосіб однозначного визначення місцеположення об'єкта на площині, який базується на визначенні пеленга об'єкта тріадою ненаправлених пасивних датчиків, який відрізняється тим, що шукане однозначне місцеположення об'єкта, у вигляді лінійних координат, визначають як точку перетину двох гіпербол і пеленга, які є лініями положення об'єкта. (11) (21) u200905735 (22) 04.06.2009 (24) 26.10.2009 (46) 26.10.2009, Бюл.№ 20, 2009 р. (72) ЛИСИЙ МИКОЛА ІВАНОВИЧ, СОЛОННІКОВ ВЛАДИСЛАВ ГРИГОРОВИЧ, СІВАК ВАДИМ АНАТОЛІЙОВИЧ, ШИНКАРУК ОЛЕГ МИКОЛАЙОВИЧ (73) НАЦІОНАЛЬНА АКАДЕМІЯ ДЕРЖАВНОЇ ПРИКОРДОННОЇ СЛУЖБИ УКРАЇНИ 3 r1 = 45179 (x j - x)2 + (y j - y)2, (3) p j = x 2 + y 2 , j = 2,3. j j 6. Підставляють рішення систем лінійних рівнянь (2) виду х(r1), у(r1) в рівняння (3) і рішають квадратне рівняння відносно невідомого значення r 1. 7. Знаходять два набора коренів системи рівнянь (2) для двох значень r1. 8. Здійснюють відбраковку хибних координат об'єкта, тобто вибирають з двох наборів коренів один, який відповідає шуканим координатам об'єкта. Недоліком даного способу [2;5;6] є необхідність проведення відбраковки хибних координат для виконання останнього пункту, наприклад, на основі використання апріорної інформації про місцеположення об'єкта, аналізу знаків різниці часу прийому сигналу парами датчиків, що не гарантує відсутності грубих похибок. Відомий різницево-дальномірний спосіб [4] визначення координат джерела радіовипромінювання забезпечує однозначне визначення місцеположення об'єкта у просторі за рахунок визначення 4 координат точки перетину трьох ліній пеленга при застосуванні чотирьох рознесених у просторі датчиків. При цьому, в основу способу покладено зменшення неоднозначності визначення місцеположення об'єкта на одній площині за рахунок визначення лінії пеленга при застосуванні трьох датчиків [3]. Розглянемо сутність однозначного визначення пеленга об'єкта. На Фіг.1 подано топологію датчиків у вигляді довільного трикутника А(-а,0), В(а,0), С(х3,у3) і точку D розміщення об'єкту. Місцеположення об'єкта, як координати точки D(x,у ) визначається системою рівнянь, яка зв'язує невідомі значення координат точки D з відомими координатами точок А,В,С і розрахованими значеннями різниць дальностей DrAB, DrAC і DrBC [4] ìa x 2 + b y 2 + f = 0 1 1 ï 1 ï 2 + b y 2 + c xy + d x + e y + f = 0, ía2 x 2 2 2 2 2 ï 2 + b y 2 + c xy + d x + e y + f = 0 ïa3 x 3 3 3 3 2 î де: (4) a1 = (2a / DrAB )2 - 1; b1 = -1; f1 = (DrAB / 2)2 - a2; a2 = (a + x3 )2 / Dr 2 - 1; AC b2 = y2 / Dr 2 - 1; c 2 = 2y3 (a + x3 ) / Dr 2 ; d2 = x3 - a - 2(a + x3 )æ 2b2 - a(a + x3 )ö / Dr 2 ; ÷ ç 3 AC AC AC ø è e2 = y3 - 2y3 æ 2b2 - a(a + x3 )ö / Dr 2 ; ÷ ç AC ø è 2 f2 = æ 2b2 - a(a + x 3 )ö / Dr 2 - æ (a - x3 )2 + y 2 + 4b2 - Dr 2 ö / 4; ÷ ç 3 AC ÷ AC ç ø è ø è 2 / Dr 2 - 1; b = y2 / Dr 2 - 1 c = -2y (a - x ) / Dr 2 ; a3 = (a - x3 ) ; 3 3 3 3 3 BC BC BC æ 2c 2 - a(a - x )ö / Dr 2 ; e = y - 2y æ 2c 2 - a(a - x )ö / Dr 2 ; d3 = x3 + a + 2(a - x 3 )ç 3 ÷ BC 3 3 3ç 3 ÷ BC ø ø è è 2 f3 = æ 2c 2 - a(a - x3 )ö / Dr 2 - æ (a + x3 )2 + y2 + 4c 2 - Dr 2 ö / 4; ÷ ç BC ç 3 BC ÷ ø ø è è a = AB / 2; b = AC / 2; c = BC / 2 / Проте, зважаючи на наявність функціонального взаємозв'язку між рівняннями системи (4), вона може мати декілька рішень, до складу яких входять координати точки D. Лінія пеленга точки D містить всі точки, координати яких є коренями сис теми рівнянь (4), а тому визначення кута пеленга зменшує неоднозначність рішення такої системи. Лінія пеленга проходить через точку D і точку F(xF,yF) з координатами [3;4] ì 2ö æ 2 ïxF = (2aDrAC - (a + x3 )DrAB )ç a + DrAC (DrAC - DrAB ) - d ÷DrAB / Z ç ÷ ï è ø , í ï æ 2 ö 2 öæ 2 2 ïyF = -y 3 ç 4a - DrAB ÷ç a - d + DrAC (DrAC - DrAB )÷ / Z è øè ø î (5) де: d = x2 + y2; Z = 4a2 æ y2 + DrABDrAC - Dr 2 ö - Dr 2 æ a2 + d2 ö + 2ax3 æ 2 - Dr 2 ö. ç ÷ ç 3 AB ÷ AB ç AC ÷ 3 3 ø è ø è ø è Кут пеленга становить [3; 4] g = arctg((2aDrAC - (a + x3 )DrAB ) / (y3DrAB )). (6) Отриманий результат, як відзначається в [3; 4], інтерпретується таким чином: всі точки, координати яких є рішеннями системи рівнянь (4), ле жать на лінії пеленга об'єкта, яка перетинає вісь Ох під кутом g (6) і проходить через точку F(xF,yF) (5). Точка F - точка спостереження зі змінними координатами. Розглянута сутність однозначного визначення пеленга є частиною способу [4] і не забезпечує 5 45179 однозначного визначення місцеположення об'єкта у площині, оскільки дозволяє визначити лише одну координату, - кут пеленга. Проте, перевагою способу є зменшення неоднозначності визначення місцеположення при вирішенні системи нелінійних рівнянь за рахунок визначення лінії пеленгу об'єкту. Також топологія датчиків подається у вигляді довільного трикутника. Тому, порядок визначення пеленга на площині, що розглянутий, взятий за основу для однозначного визначення координат точки місцеположення об'єкта на площині, а спосіб [4] вибраний за прототип. Метою корисної моделі є однозначне визначення місцеположення об'єкта на площині тріадою ненаправлених пасивних датчиків без проведення відбраковки хибних координат. У найближчому аналозі усувається неоднозначність визначення місцеположення об'єкта, як лінії пеленга за рахунок рішення системи нелінійних рівнянь гіпербол (4) математичними методами без проведення відбраковки хибних координат, що є першим етапом однозначного визначення місцеположення об'єкта на площині. Другий етап передбачає визначення лінійних координат об'єкта на основі визначеної кутової координати - пеленгу. Тобто, за рахунок вирішення координатометричної задачі у два етапи необхідно досягти зниження її обчислювальної складності та усунення неоднозначності рішення. Достатньою умовою однозначного визначення місцеположення є визначення точки перетину двох ліній гіпербол і лінії пеленга, яка перетинає вісь Ох в точці y x 0 = xF - F , (7) tgg де х0 - точка перетину лінією пеленга вісі Ох; g - кут пеленга об'єкта [3; 4]; xF,yF - змінні координати точки спостереження [3; 4]. При одночасному перенесенні початку системи координат в точку (x0,0) і повороті координатних осей на кут g рівняння перетворення координат мають вигляд x = x 0 + x' cos g - y' sin g, (8) y = x' sin g - y ' cos g, де x’,y’ - координати місцеположення об'єкта (точка D) в системі координат x’O’y’. На Фіг.2 подано однозначне визначення місцеположення об'єкта в точці D: А(-а,0), B(а,0), С(х3,у3) - точки розміщення датчиків. У результаті перетворень рівнянь системи (4) із врахуванням (7), (8) отримаємо координати однозначного місцеположення об'єкта w 2g3 - w 3g2 ì ïx = x 0 + h g - g h cos g ï 3 2 3 2 í w 2g3 - w 3g2 ï y= sin g ï h3g2 - g3h2 î де (9) 6 g2=a2coc2g+b2sin2g+c2cosgsing; g3=a3cos2g+b3sin2g+c3cosgsing; h2=2a2x0cosg+c2x0sing+d2cosg+e2sing; w2=a2x20+d2x0+f2; h3=2a3x0cosg+c3x0sing+d3cosg+e3sing; w3=a3x20+d3x0+f3. Координати (9) точки перетину двох ліній гіпербол і лінії пеленга однозначно визначають місцеположення об'єкта без здійснення відбраковки хибних координат. Розроблений спосіб реалізується за таким алгоритмом: 1. Розміщують пасивні ненаправлені датчики у вершинах довільного трикутника, Фіг.2. 2. Приймають сигнал трьома датчиками. 3. Вимірюють дві незалежні різниці часу (tAB, tAC) прийому сигналу парами датчиків, які утворюють вимірювальні бази. 4. Розраховують значення різниць дальностей DrAB-DrAC= -DrBC (DrAB=tABV, DrAC= tACV, DrBC= tBCV). 5. Складають систему нелінійних рівнянь (4), які пов'язують шукані координати об'єкта x, y з координатами точок прийому А, В, С та виміряними різницями дальностей DrAB, DrAC, DrBC. 6. Розраховують змінні координати точки спостереження F(xF,yF)(5). 7. Визначають кут пеленга об'єкта (6). 8. Визначають координати точки однозначного місцеположення об'єкта на площині (9) як координати точки перетину лінії положення об'єкта: двох гіпербол і пеленга. Відмінністю розробленого способу від найближчого аналога [4] є уведення останнього пункту в розглянутому алгоритмі. Таким чином, розроблений спосіб слід розглядати як рішення координатометричної задачі у два етапи. Аналогічно найближчому аналогу, на першому етапі, п. 1-7 алгоритму, забезпечується визначення пеленга як лінії положення об'єкта, яка проходить через точку, що має змінні координати. На другому етапі, п. 8 алгоритму, на відміну від найближчого аналога, визначають точку перетину лінії пеленга і ліній гіпербол. При цьому точка перетину однозначно визначає місцеположення об'єкта, що дозволило розширити функціональні можливості найближчого аналога. Джерела інформації 1. Пат. RU 2273867 С1, МПК G01V1/16. Сейсмическое устройство определения координат объектов /Крюков И.Н., Иванов В.А., Козинный А.К., Матвеев В.В. Опубл. 10.04.2006., патентообладатель Калинингр. воен. инст. ФПС РФ. №2004131048/28; заявл.25.10.2004; опубл. 10.04.2006, Бюл. № 10. 2. Пат. RU 2311686 С2, МПК G08B13/00. Способ обнаружения и определения текущего местоположения нарушителя охраняемой зоны /Колигаев С.О., патентообладатель ООО Лаб. прикл. информ. технол. «ИНФРАД». №2005132012/09; заявл.18.10.2005; опубл. 27.11.2007, Бюл. №33. 3 Пат. RU 2258242 С2, МПК G01S3/46, 11/02. Разностно-дальномерный способ пеленгования источника радиоизлучения и реализующее его устройство /Сайбель А.Г., патентообладатель Во 7 45179 ен.-косм. акад. - №2003118800/09; заявл. 23.06.2003; опубл. 10.08.2005, Бюл. № 22. 4. Пат. RU 2309420 С1, МПК G01S3/46. Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство /Сайбель А.Г., Гришин П.С., патентообладатель Воен.-косм. акад. -№2006103054/09; заявл. 02.02.2006; опубл. 27.10.2007, Бюл. № 30. Комп’ютерна верстка Л.Литвиненко 8 5. Дудкин В.А. Варианты построения пассивных сейсмических локаторов, основанных на измерении временных задержек //Современные технологии безопасности. - 2005. - №4. - С.24-29. 6. Звежинский С.С, Иванов В.А. Средства обнаружения и системы охранной сигнализации: Уч.пособ. для студ. высш. уч. зав. /Звежинский С.С, Иванов В.А. /Под ред. А.В. Петракова. - М: МТУСИ, 2008. - 260с. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for unique determination of object location on plane
Автори англійськоюLysyi Mykola Ivanovych, Solonnikov Vladyslav Hryhorovych, Sivak Vadym Anatoliiovych, Shynkaruk Oleh Mykolaiovych
Назва патенту російськоюСпособ однозначного определения местоположения объекта на плоскости
Автори російськоюЛысый Николай Иванович, Солонников Владислав Григорьевич, Сивак Вадим Анатольевич, Шинкарук Олег Николаевич
МПК / Мітки
МПК: G08B 13/00, G01S 5/00
Мітки: спосіб, місцеположення, однозначного, об'єкта, визначення, площині
Код посилання
<a href="https://ua.patents.su/4-45179-sposib-odnoznachnogo-viznachennya-miscepolozhennya-obehkta-na-ploshhini.html" target="_blank" rel="follow" title="База патентів України">Спосіб однозначного визначення місцеположення об’єкта на площині</a>
Спосіб визначення орієнтації і місцеположення транспортного засобу
Номер патенту: 64162
Опубліковано: 16.02.2004
Автор: Гайдук Павло Миколайович
МПК: G01C 23/00, G01C 21/00
Мітки: транспортного, спосіб, орієнтації, засобу, визначення, місцеположення
Формула / Реферат:
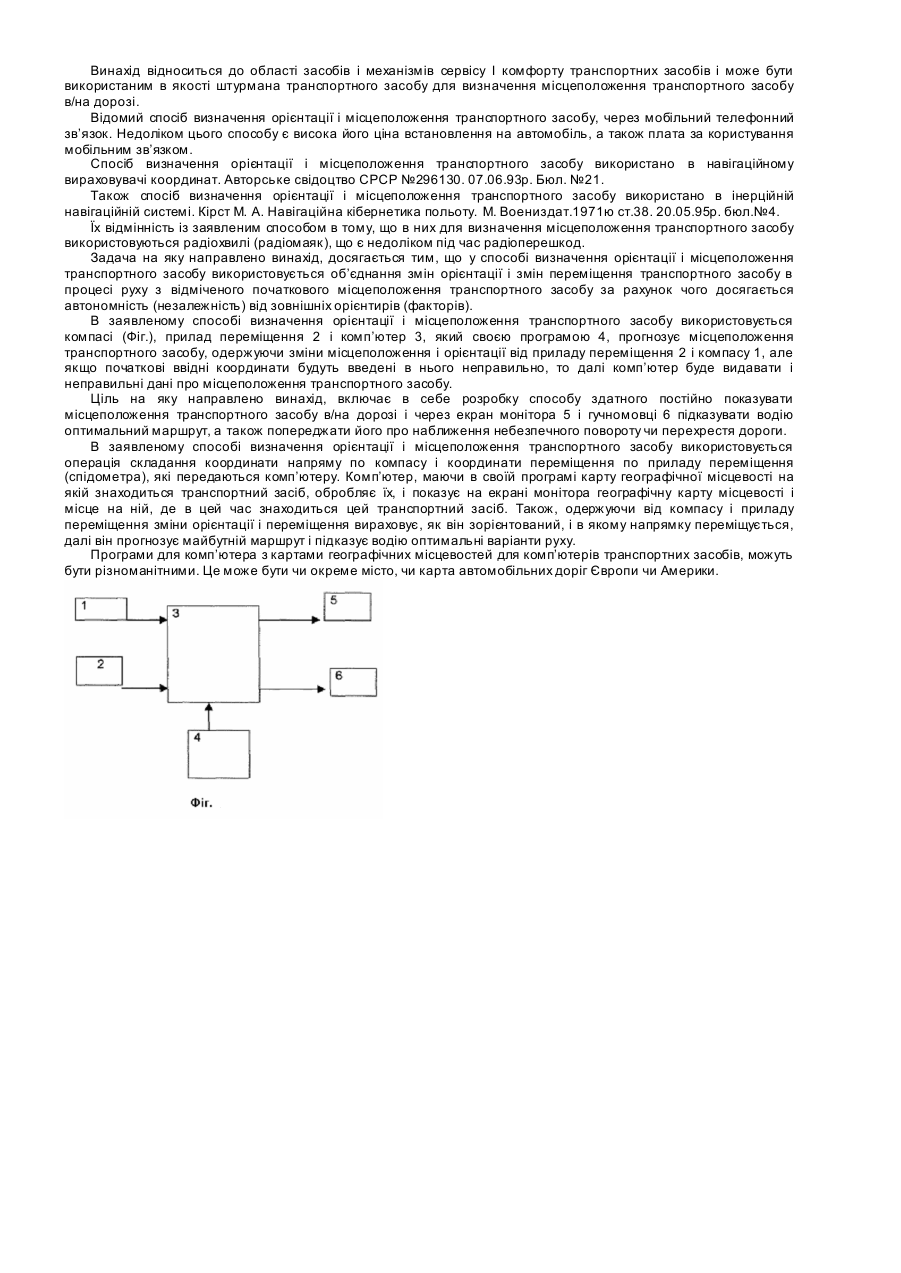
Спосіб визначення орієнтації і місцеположення транспортного засобу, що полягає в визначенні місцеположення транспортного засобу на географічній карті, який відрізняється тим, що відмічають початкове місцеположення транспортного засобу на географічній карті, введеній у комп’ютер, та визначають його орієнтацію відносно сторін світу, а в процесі руху транспортного засобу зміни його місцеположення і орієнтації передають в комп’ютер, і одержують...
Спосіб визначення місцеположення свищів у виробах
Номер патенту: 27486
Опубліковано: 12.11.2007
Автори: Філоненко Сергій Федорович, Пономаренко Олександр Васильович, Бабак Віталій Павлович
МПК: F17D 5/02, G01N 29/00, G01M 3/00, G01N 29/14
Мітки: визначення, свищів, виробах, спосіб, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення свищів у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими визначають місцеположення свищів, який відрізняється тим, що як вищезгадані характеристики використовують положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцеположення свища у...
Спосіб визначення місцеположення точок акупунктури
Номер патенту: 37001
Опубліковано: 16.04.2001
Автори: Смердова Тетяна Андріївна, Грицюк Ольга Володимирівна, Крижанівський Володимир Ярославович
МПК: A61H 39/02
Мітки: визначення, спосіб, місцеположення, акупунктури, точок
Формула / Реферат:
1. Спосіб визначення місцеположення точок акупунктури, який полягає в тому, що встановлюють давач фізичного параметра на поверхні шкіри, переміщують його в передбачуваній зоні знаходження точки акупунктури і за максимальною амплітудою фізичного параметра, який вимірюють, визначають наявність точки акупунктури на місці розміщення давача, який відрізняється тим, що трьохелектродним давачем формують функціональне співвідношення імпедансів двох...
Спосіб визначення місцеположення літаючого апарата або морського судна
Номер патенту: 24487
Опубліковано: 21.07.1998
Автор: Рудий Роман Михайлович
МПК: G01S 5/00
Мітки: визначення, спосіб, морського, судна, апарата, місцеположення, літаючого
Формула / Реферат:
Спосіб визначення місцеположення літаючого апарата або морського судна, що включає визначення відстаней до земної поверхні, обробку отриманої інформації і прийняття рішення, який відрізняється тим, що по виміряних відстанях складають образ як вектор ознак, по цифровій моделі рельєфу місцевості для заданої висоти польоту над поверхнею землі обчислюють вектор ознак еталонів, а порівняння отриманого образу з образами еталонів здійснюють за...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Козлинський Мирослав Петрович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: здійснення, вертикальний, визначення, ваги, пристрій, центра, транспортного, засобу, площині, положення, колісного, спосіб
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Попередній патент: Спосіб двочастотної рефлектометрії волоконного світловоду
Наступний патент: Ендопротез кульшового суглоба
Випадковий патент: Спосіб реклами за допомогою рекламно-інформаційного пристрою та додаткового носія рекламної інформації