Магнітоелектричний датчик магнітного поля
Номер патенту: 106286
Опубліковано: 11.08.2014
Автори: Скирта Юрій Борисович, Шарай Ірина Володимирівна, Крупа Микола Миколайович
Формула / Реферат
Магнітоелектричний датчик магнітного поля, що складається з корпусу, магніточутливого елемента і п'єзокерамічних елементів, який відрізняється тим, що магніточутливий елемент датчика виготовлений у вигляді куба з магнітного мартенситного монокристалічного матеріалу NiMnGa, тетрагональна кристалічна ґратка якого знаходиться в багатодоменній магнітній фазі, причому ребра куба паралельні базовим напрямкам тетрагональної ґратки мартенситного кристалу, а на дві пари граней куба з двох сторін встановлені п'єзокерамічні елементи, які жорстко зв'язані з гранями куба для знімання різниці електричних потенціалів, що виникає під дією змінного магнітного поля, причому пари граней куба вибираються з умови максимального зменшення віддалі між першою парою граней при одновісному стискуванні мартенситного куба в напрямку, перпендикулярному до цієї пари граней, і одночасного максимального збільшення віддалі між другою парою граней.
Текст
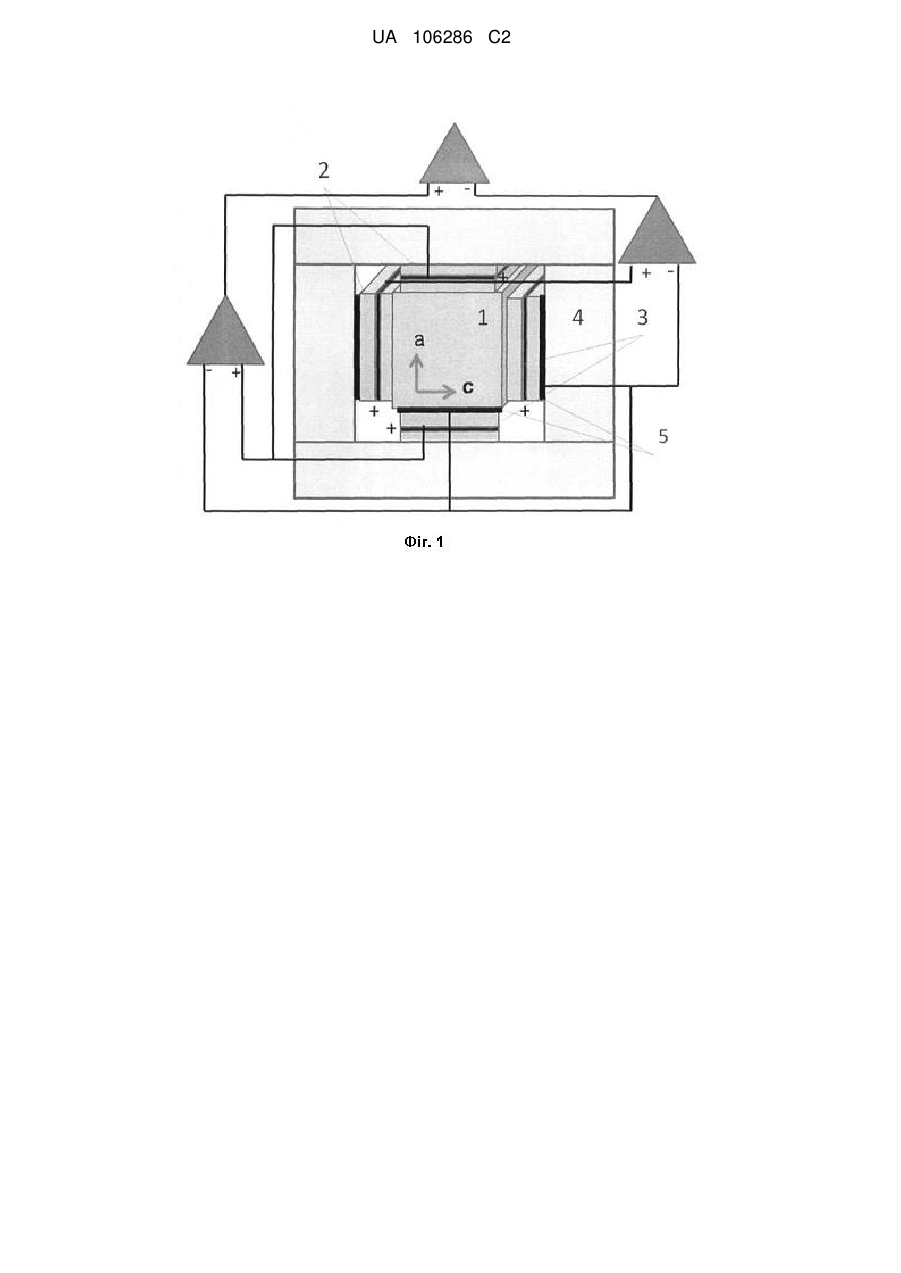
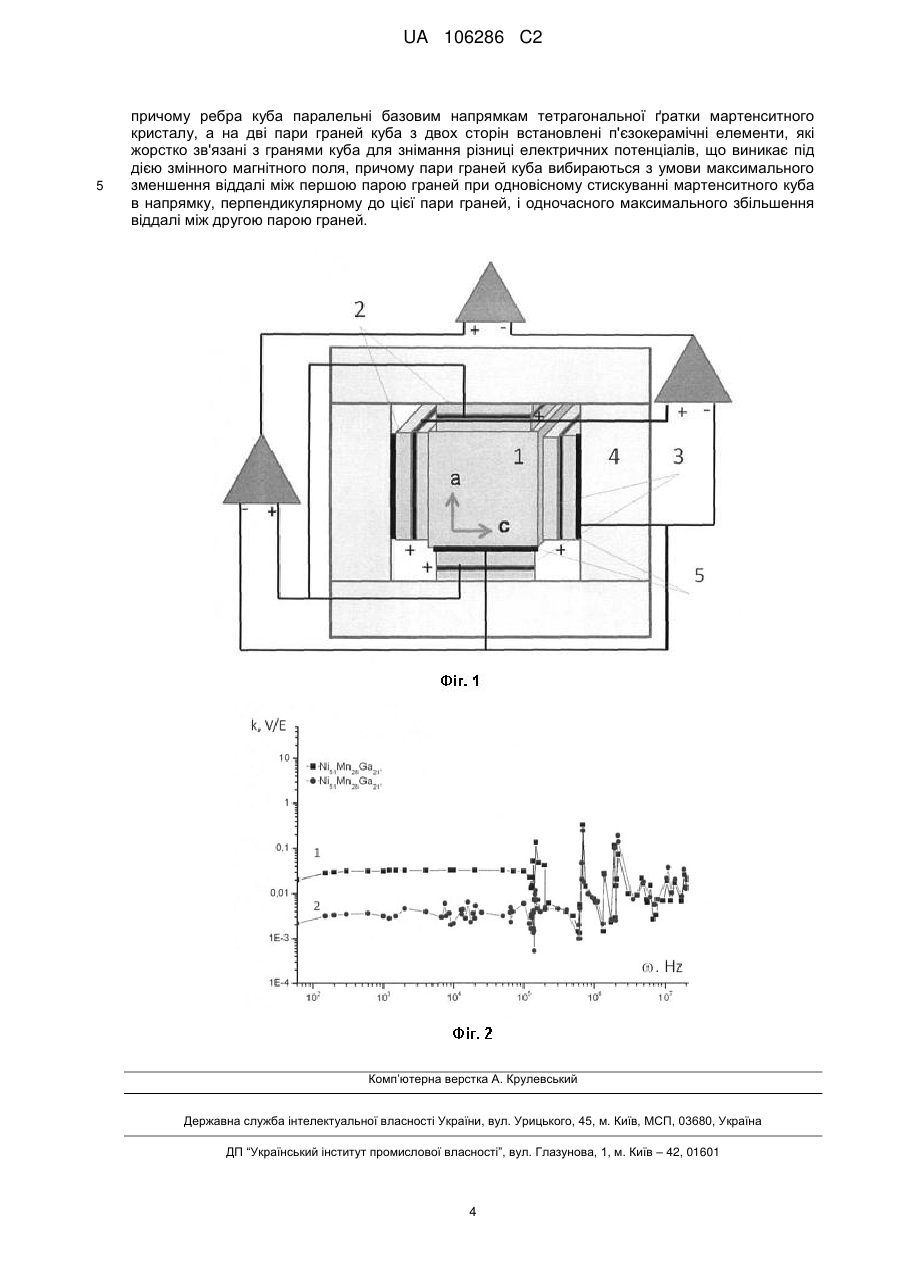
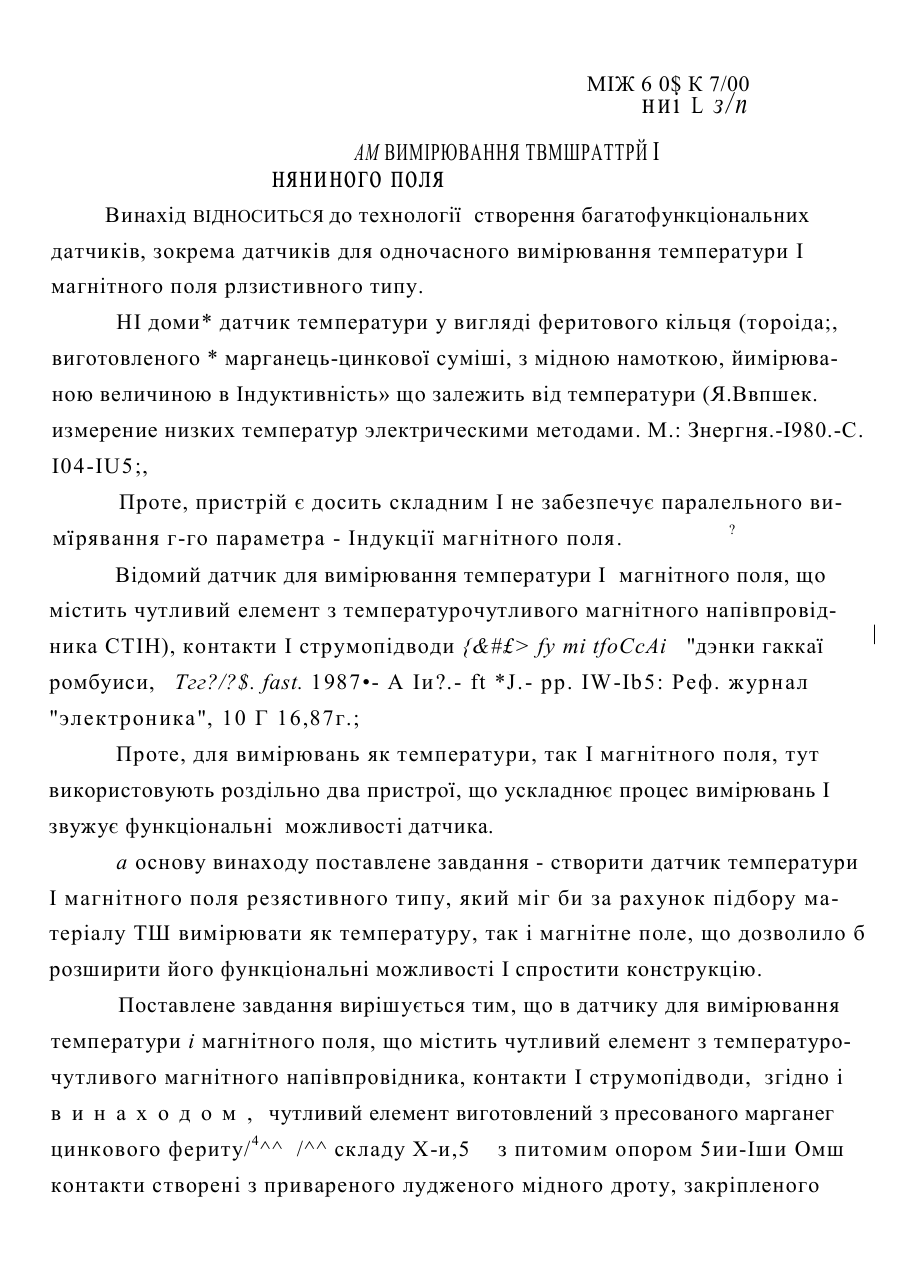
Реферат: Винахід належить до області вимірювання електромагнітного поля і може використовуватись для вимірювання напряму і величини магнітного поля і реєстрації електромагнітних сигналів в широкій спектральній області. Магнітоелектричний датчик магнітного поля складається з корпусу, магніточутливого елемента, що виготовлений з магнітного мартенситного монокристалічного матеріалу NiMnGa, і п'єзокерамічних елементів, які встановлені з двох сторін магніточутливого елемента і з яких знімається різниця електричних потенціалів, що виникає за рахунок магнітострикційного тиску магніточутливого елемента під дією змінного магнітного поля. Технічним результатом винаходу є розширення функціональних можливостей магнітоелектричного датчика магнітного поля через розширення частотного діапазону і можливість роботи без додаткового електричного живлення, підвищення чутливості і точності вимірювання величини та напрямку магнітного поля і зменшення його габаритів. UA 106286 C2 (12) UA 106286 C2 UA 106286 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області вимірювання електромагнітного поля і може використовуватись для вимірювання напряму і величини магнітного поля і реєстрації електромагнітних сигналів в широкій спектральній області. За принципом роботи датчики магнітного поля можна виділити такі класи: датчики на ефекті Холла (патенти US 7851780, US 8034675 і US 8143646), ферорезонансні або як ще їх називають магнітоіндукційні датчики (патенти RU 2244318; US 6,560,128), магніторезистивні (патенти US 5,206,590; RU № 2392697 і RU № 2404127), магнітооптичні (патент US 4,554,459; RU 2161316), спін-вентильні (патенти US 5,561,368; US 7112962), квантові або протонні (патенти RU 2361247; US 6,912,148) і сквідовські (патент RU 2384856) датчики. Основним недоліком датчиків на ефекті Холла, магніторезистивних, магнітооптичних, спінвентильних і магніторезистивними датчиків є невисока чутливість і слабка залежність величини сигналу від напряму магнітного поля, крім того для роботи таких датчиків на них необхідно подавати стабілізовану електричну напругу. Це ускладнює надійність їх роботи знижує функціональну можливість і збільшує їх габарити, знижує надійність їх роботи. Сквідовські і протонні датчиками при високій чутливості до величини магнітного поля, практично, не дозволяють вимірювати його напрям. Крім того, такі датчики також потребують досить складної системи електричного живлення, а для сквідовських датчиках необхідна система охолодження. Все знижує функціональну можливість таких датчиків, підвищує їх габарити, знижує надійність їх роботи. Ферозондові чи магнітоіндукційні датчиками при своїй простоті мають досить високу чутливість до величини магнітного поля, дозволяють вимірювати напрямок магнітного поля і його градієнт. Проте чутливість ферозондових датчиків зростає зі збільшення об'єму феритових стержнів, на які наносять обмотки збудження і реєстрації. Збільшення об'єму феритових стержнів не тільки погіршує направленість таких датчиків, але й звужує частотну смугу вимірюваних магнітних полів, підвищує рівень власних шумів датчика при перемагнічуванні і збільшує його габарити. Крім того, на такі датчики необхідно подавати стабілізоване досить високочастотне збудження, тобто вони не можуть працювати без активного електричного живлення, що є малоприйнятним для автономних систем реєстрації електромагнітних полів. Найбільш близьким за принципом роботи до нашого датчика магнітного поля є так звані магнітоелектричні датчики (патент RU 2244318, MПK G01R 33/02), магніточутливий елемент яких складається з багатошарового композиційного матеріалу ферит-п'єзокераміка і котушок підмагнічення. Під дією вимірюваного магнітного поля і подачі електричного імпульсу на котушки підмагнічення змінюється магнітний стан композиційного матеріалу і на елементах п'єзокераміки появляється імпульс електричної напруги, величина якого пропорційна вимірюваному постійному полю. Недоліком даного датчика є те, що він призначений для вимірювання постійних полів, і в ньому також використовується досить складна система електричного живлення. Більш досконалим є різновид магнітоелектричного датчика (патент RU 102813 MПK G01R), який ми вибрали як прототип. Цей датчик складається з корпусу, магніточутливого елемена, виготовленого з композиційного матеріалу на основі діелектричної полімерної матриці, і орієнтованих вуглецевих нанотрубок, заповнених магнітним металом, і п'єзокерамічного моста з чотирма електродами, на одну пару з яких подається електрична напруга, а з другої пари знімається вихідний сигнал. Магнітне поле викликає деформації магніточутливого елемента, яка передається на п'єзокерамічний міст, в якому за рахунок п'єзоефекту виникає різниця електричного потенціалу, величина якого пропорційна магнітному полю. Основним недоліком даного магнітоелектричного датчика є низька резонансна частота магніточутливого елемента на основі діелектричної полімерної матриці, що обмежує діапазон вимірюваних магнітних полів низькими частотами, а також низька чутливість, що обумовлено малою масою магнітного матеріалу в магніточутливому елементі. Тому для підвищення чутливості на цей датчик подають електричну напругу живлення. Крім того, даний датчик вимірює величину магнітного поля тільки в одному напрямі, причому діаграма направленості датчика досить широка. Для вимірювання магнітного поля в двох напрямах приходиться будувати складну систему з двома магніточутливими елементами, з двома п'єзокерамічними мостами, і двома каналами стабілізованої електричної напруги. Все це звужує функціональну можливість такого типу датчика, знижує надійність його роботи і збільшує його габарити. Технічною задачею, на розв'язання якої направлений даний винахід, є розширення функціональних можливостей магнітоелектричного датчика магнітного поля через розширення частотного діапазону і можливість роботи без додаткового електричного живлення, підвищення чутливості і точності вимірювання величини та напрямку магнітного поля і зменшення його габаритів. Вирішення поставленої задачі в даному винаході досягається за рахунок того, що у відомому магнітоелектричному датчику магнітного поля, який складається з корпусу, 1 UA 106286 C2 5 10 15 20 25 30 35 40 45 50 55 магніточутливого елемента і п'єзокерамічних елементів, магніточутливий елемент датчика виготовлений у вигляді куба з магнітного мартенситного монокристалічного матеріалу NiMnGa, тетрагональна кристалічна ґратка якого знаходиться в багатодоменній магнітній фазі, причому ребра куба паралельні базовим напрямкам тетрагональної ґратки мартенситного кристалу, а на дві пари граней куба з двох сторін встановлені п'єзокерамічні елементи, які жорстко зв'язані з гранями куба і з яких знімається різниця електричних потенціалів, що виникає під дією змінного магнітного поля, причому пари граней куба вибираються з умови максимального зменшення віддалі між першою парою граней при одновісному стискуванні мартенситного куба в напрямку, перпендикулярному до цієї пари граней, і одночасного максимального збільшення віддалі між другою парою граней. Схема магнітоелектричного датчика показана на фігурі 1. Він складається з магніточутливого елемента 1, який виготовлений з магнітного мартенситного монокристалічного матеріалу NiMnGa, і двох пар п'єзокерамічних елементів 2, кожна з пар яких жорстко зв'язана з протилежними гранями куба. Для виготовлення магніточутливого елемента використовують монокристалічний магнітний мартенсит Ni(47-53)Mn(27-31)Ga(23-26), тобто за концентрацію складових вибирають так, щоб температура Кюрі матеріалу була вища від діапазону робочих температур датчика (див. роботу - Murray S J et al. Appl. Phys. Lett. 77, 886 2000). П'єзокерамічні елементи 2 виготовляються з п'єзокераміки з великим значенням коефіцієнта прямого п'єзоефекту і жорстко притискаються як показано на кресленні до протилежних граней куба по два однакових п'єзоелементи. Ці два п'єзоелементи встановлюються таким чином, що вони поляризовані назустріч один одному, і в площині їх з'єднання встановлений плоский електрод 3, який виготовляється з матеріалу з високою провідністю (срібло або покрита сріблом чи паладієм бронза або латунь). Причому орієнтація всіх чотирьох пар п'єзоелементів така, що в площині їх з'єднання під діє стискування генерується заряд одного знака плюс або мінус. Жорстке притискання п'єзоелементів до граней мартенситного куба здійснюється за рахунок конструкції корпуса 4, який виготовляється в вигляді ящика без дна і закривки з немагнітного металу (мідь, латунь, дюралюміній і т.д.). В площині з'єднання корпусу датчика з п'єзоелементами і в площині з'єднання магніточутливого елемента з п'єзоелементами встановлюються електроди 5, які аналогічні електродам 3 і з'єднані між собою електричним контактом. Відносно цих електродів 5 і реєструється потенціал, який наводиться в нашому датчику під дією вимірюваного магнітного поля. Грані куба до яких жорстко притиснуті п'єзоелементи попередньо вибираються по вимірюваннях зміни віддалі між ними при одновісному стискуванні мартенситного куба в напрямку, перпендикулярному до його граней. Перша пара таких граней повинна давати максимальне зменшення віддалі між цими гранями під дією однакової по величині сили стискування (напрямок с на фігурі 1). При зменшенні віддалі між парою стискуваних граней одночасно збільшується віддаль між іншими парами граней. Для датчика як друга вибрана пара використовується та пара граней, віддаль між (напрямок а на фігурі 1) якими при цьому зростає на багато більшу величину, ніж між третьою парою граней. Ця третя пара граней куба в даній конструкції датчика залишається вільною. Особливістю даного магнітного датчика є те, що його магніточутливий елемент не тільки виготовлений з магнітного мартенситного монокристалічного матеріалу NiMnGa, але й те, що він перебуває в багатодоменному стані. В такому стані мартенситний кристал складається мікрокристалітів, які взаємно перпендикулярно орієнтовані, що і забезпечує в таких кристалах рекордно високе значення магнітострикції. Для переводу монокристалу NiMnGa в багатодоменний стан його потрібно тренувати, тобто піддавати циклічному навантаженню (див. роботу - Murray S J et al. Appl. Phys. Lett. 77, 886 2000). Працює даний магнітометр наступним чином. Під дією магнітного поля Н і, направленого по напрямку с, збільшується розмір куба в цьому напрямку. Причиною такого збільшення є те, що за рахунок намагнічування магнітним полем мартенситного кристала, який перебуває в багатодоменному стані, зростає величина магнітного поля і відповідно і розмір магнітних доменів вздовж магнітного поля. Таке зростання розміру куба викликає додатковий тиск на пари п'єзоелементів, які перпендикулярні до напрямку його розширення, і зростання електричного потенціалу на відповідних електродах 31 U1 U0 U1 відносно корпусу датчика і електродів 5. Одночасно за рахунок зменшення величини доменів в перпендикулярному (напрямок а) до діючого поля напрямку зменшується тиск на пари п'єзоелементів, які паралельні до напрямку дій магнітного поля, що приводить до зменшення електричного потенціалу на відповідних електродах 32 U2 U0 U2 . Величина зміни електричного потенціалу пропорційна амплітуді діючого магнітного поля H i , довжині ребра куба мартенситного кристала l , коефіцієнту зміни розмірів ребра куба мартенситного кристала під дією магнітного поля dl / dH , коефіцієнту зміни 2 UA 106286 C2 тиску мартенситного кристала на пари п'єзоелементів за рахунок зміни довжини ребра куба мартенситного кристала dP / dl і п'єзоелектричного модуля d33 п'єзоелементів нашого датчика dl dP dl dP lHid33 , U2 2 lHid33 , (1) dH dl dH dl де - коефіцієнт пропорційності. В результаті, якщо реєструвати зміну різницю потенціалів між електродами 31, які орієнтовані перпендикулярно до діючого магнітного поля, і електродами 32, які орієнтовані паралельно до діючого магнітного поля, то при умові 1 2 ми утримаємо U0 0 U1 1 5 dl dP lHid33 . (2) dH dl Якщо тепер магнітне поле направлене по напрямку а, то реєструючи різницю потенціалів між тими ж самими електродами 31 і 32, ми отримаємо приблизно таку ж саму величину, але протилежного знака U0 0 . Частотна залежність зареєстрованого електричного потенціалу буде повторювати частотну залежність діючого магнітного поля, в діапазоні частот 0 0 , де 0 ~ 2l / - частота перестройки доменної структури в мартенситному кристалі, швидкість звуку в мартенситному кристалі (див. роботу V. L'vov, О. Rudenko, N. Glavatska, PHYSICAL REVIEW В 71, 024421, 2005). При ( 2 6)x10 4 м / с величина частота 0 10 6 c 1 . Хотілось би відмітити що в області, далекій від 0 , і області частот, менших від частоти резонансного збудження використовуваних в даній конструкції датчика п'єзоелементів чутливість нашого датчика магнітного поля практично не залежить від частоти, що є його важливою перевагою. Все це показує, що вимірюючи різницю потенціалів між електродами 3 1 і електродами 5, між електродами 32 і електродами 5, а також між електродами 31 і електродами 32, ми можемо з допомогою нашого датчика визначити в досить широкому частотному діапазоні величину і напрям магнітного для двох взаємно перпендикулярних напрямків. Причому при таких вимірюваннях п'єзоелементи потрібно використовувати як генератор заряду і з'єднувати їх паралельно (див. фігуру 1), що дозволяє за рахунок високої ємності отримати хорошу чутливість і більш низький рівень шумів в нашому датчику. Створення додаткового тиску на мартенситний магніточутливий елемент 1, яке досягається і регулюється конструктивними елементами корпуса 4, дозволяє не тільки збільшити величини коефіцієнтів dl / dH і dP / dl , але й перейти в область, де величина цих коефіцієнтів, практично, лінійна в широкому діапазоні амплітуд магнітного поля (див. роботи: А.Н. Васильєв, В.Д. Бучельников, Т. Такай, В.В. Ховайло, Э.И. Эстрин. Успехи физических наук, 173, № 6, 5777, 2003; V. L'vov, S. Kustov, Ε. Cesar. Acta Materialia, 56, 802, 2008). Ми провели експериментальну перевірку працездатності макетного зразка датчика. На фігурі 2 представлена виміряна нами частотна залежність коефіцієнта магнітоелектричного перетворення, отримана нами при використанні магніточутливого елемента в вигляді паралелепіпеда 7x5x5 мм з магнітного мартенситного монокристала Ni51Mn28Ga21 і п'єзокерамічні елементів товщиною 1,1 мм. Вимірювання чутливості нашого магнітоелектричного датчика проводилось для випадку, коли мартенситний кристал знаходився в багатодоменному стані (крива 1) і однодоменному стані, що досягалось за рахунок його попереднього одновісно стискування і прикладенні вздовж осі постійного намагнічуючого поля H 5 кілоерстед. Результати приведені на фігурі 2 показують, що датчик при магніточутливому елементі в багатодоменному стані має високу чутливість k 0,02 0,04 V / E , яка на більш ніж на порядок перевищує чутливість для випадку однодоменного стану магніточутливого елемента. Ці результати показують, що наш датчик дозволяє реєструвати магнітні поля на рівні 10 5 ерстеда і його чутливість майже не змінюється аж до частот, близьких до резонансної частоти наших п'єзокерамічних елементів. Таким чином все вищевикладене підтверджує перспективність використання наших магнітоелектричних датчиків. U0 2 10 15 20 25 30 35 40 45 ФОРМУЛА ВИНАХОДУ 50 Магнітоелектричний датчик магнітного поля, що складається з корпусу, магніточутливого елемента і п'єзокерамічних елементів, який відрізняється тим, що магніточутливий елемент датчика виготовлений у вигляді куба з магнітного мартенситного монокристалічного матеріалу NiMnGa, тетрагональна кристалічна ґратка якого знаходиться в багатодоменній магнітній фазі, 3 UA 106286 C2 5 причому ребра куба паралельні базовим напрямкам тетрагональної ґратки мартенситного кристалу, а на дві пари граней куба з двох сторін встановлені п'єзокерамічні елементи, які жорстко зв'язані з гранями куба для знімання різниці електричних потенціалів, що виникає під дією змінного магнітного поля, причому пари граней куба вибираються з умови максимального зменшення віддалі між першою парою граней при одновісному стискуванні мартенситного куба в напрямку, перпендикулярному до цієї пари граней, і одночасного максимального збільшення віддалі між другою парою граней. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюKrupa Mykola Mykolaiovych
Автори російськоюКрупа Николай Николаевич
МПК / Мітки
МПК: G01R 33/00
Мітки: датчик, магнітного, поля, магнітоелектричний
Код посилання
<a href="https://ua.patents.su/6-106286-magnitoelektrichnijj-datchik-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентів України">Магнітоелектричний датчик магнітного поля</a>
Датчик для вимірювання температури і магнітного поля
Номер патенту: 33148
Опубліковано: 15.02.2001
Автори: Венгер Евген Федорович, Варшава Славомир Степанович, Прохорович Анатолій Вікторович, Ющук Степан Іванович
МПК: G01K 7/00, H01L 43/00
Мітки: вимірювання, поля, датчик, магнітного, температури
Текст:
...Х-и,5 з питомим опором 5ии-Іши Омш контакти створені з привареного лудженого мідного дроту, закріпленого ІНДІЄМ. встановлено, що виготовлення чутливого елемента датчика а пресованого марганець-цинкового фериту даного складу І питомого опору *абе»~ печуе добру температурну чутливість датчика в Інтервалі U».,+IOU°C s коефіцієнтом тК0-£ 5&/R, а також його чутливість до магнітних полів s коефіцієнтом^^ Ом /тл дз Оскільки...
Датчик магнітного поля
Номер патенту: 33149
Опубліковано: 15.02.2001
Автори: Пелех Любов Миколаївна, Варшава Славомир Степанович, Венгер Евген Федорович, Прохорович Анатолій Вікторович
МПК: H01L 43/06
Мітки: магнітного, поля, датчик
Текст:
...витягнуті HP з 2-а контактами кожен, дозволяв підвищити багатократно чутливість датчика» оскільки практично не Існує обмежень на їх КІЛЬКІСТЬ , те хнологія їх виготовлення в набагато простіша, ніж елементів лолла, оскільки не Існує проблеми холдЕвських контактів, що особливо важливо для мікрокристалів, якими в ниткопо діб ні кристали. Окрім цього, встановлення МР на кільцевому фериті дозволяє сумістити функції підкладки І концентратора...
Датчик магнітного поля для виявлення феромагнітних частинок
Номер патенту: 12196
Опубліковано: 16.01.2006
Автори: Поздняков Ігор Володимирович, Черняк Володимир Миколайович
МПК: G07D 7/04, G01D 5/12, G06K 7/08
Мітки: датчик, поля, феромагнітних, частинок, магнітного, виявлення
Формула / Реферат:
Датчик магнітного поля для виявлення феромагнітних частинок, що містить магніторезистивний елемент і систему намагнічування феромагнітних частинок, який відрізняється тим, що система намагнічування феромагнітних частинок виконана у вигляді постійних магнітів, розташованих із двох боків магніторезистивного елемента.
Датчик для вимірювання напруженості магнітного поля
Номер патенту: 33219
Опубліковано: 15.02.2001
Автори: Добріца Євген Леонідович, Серков Олександр Анатолійович, Гуйська Ганна Едвардівна, Ефременко Любов Львовна, Ковальов Ігор Валерійович
МПК: G01R 33/02
Мітки: вимірювання, магнітного, датчик, напруженості, поля
Текст:
...винаходу ЕЩІОЧЄЯ у тому, що виконання кожної вимірювальної котушки у вигляді відрізка екранованого кабелю що продовжує ВІДПОВІДНУ кабельну лінію передачі інформації, дає змогу залучити однаковіш хвильовий опір кабельної лінію передачі інформації та датчика чим досягається збільшення частотного діапазону виміру напруженості магнітного поля. На фіг. наведено датчик для вимірювання напруженості магнітного поля. Винахід містить дві...
Датчик магнітного поля
Номер патенту: 36598
Опубліковано: 16.04.2001
Автори: Грошенко Микола Олександрович, Вілесов Юрій Федотович
МПК: G02F 1/00, G01R 33/00
Мітки: магнітного, датчик, поля
Текст:
...між вели чиною фотосигналу і напруженістью магнітного поля визначають напруженість поля, що досліджується. Фотоприймач (7) реєструє: не все продифрагировавше світло, а лише випромінювання вищих порядків дифракції на MOM. Відношення корисного оптичного сигналу до всього сві тового потоку (динамічний діапазон) зростає, що підвищує точність виміру напруженості магнітного поля. Крім того, зняття вимоги на співвідношення між апертурою...
Попередній патент: Опорний шпангоут з композиційних матеріалів
Наступний патент: Манекен для випробувань інвалідних колясок
Випадковий патент: Спосіб захисту електромережі шахти від короткого замикання