Спосіб визначення показників курсової стійкості землерийно-транспортних машин
Номер патенту: 108314
Опубліковано: 11.07.2016
Автори: Чаплигіна Олександра Михайлівна, Шевченко Валерій Олександрович

Формула / Реферат
Спосіб визначення показників курсової стійкості землерийно-транспортних машин, що включає визначення показників курсової стійкості з урахуванням бокового зсуву та зміни кута повздовжньої осі машини, який відрізняється тим, що показники бічного зсуву і зміна кута машини відносно поздовжньої осі, які мають криволінійну траєкторію руху, фіксуються по відбитку та осі колеса машини, остаточне визначення зміни кута машини відносно поздовжньої осі встановлюється за допомогою геометричної функції tgb.
Текст
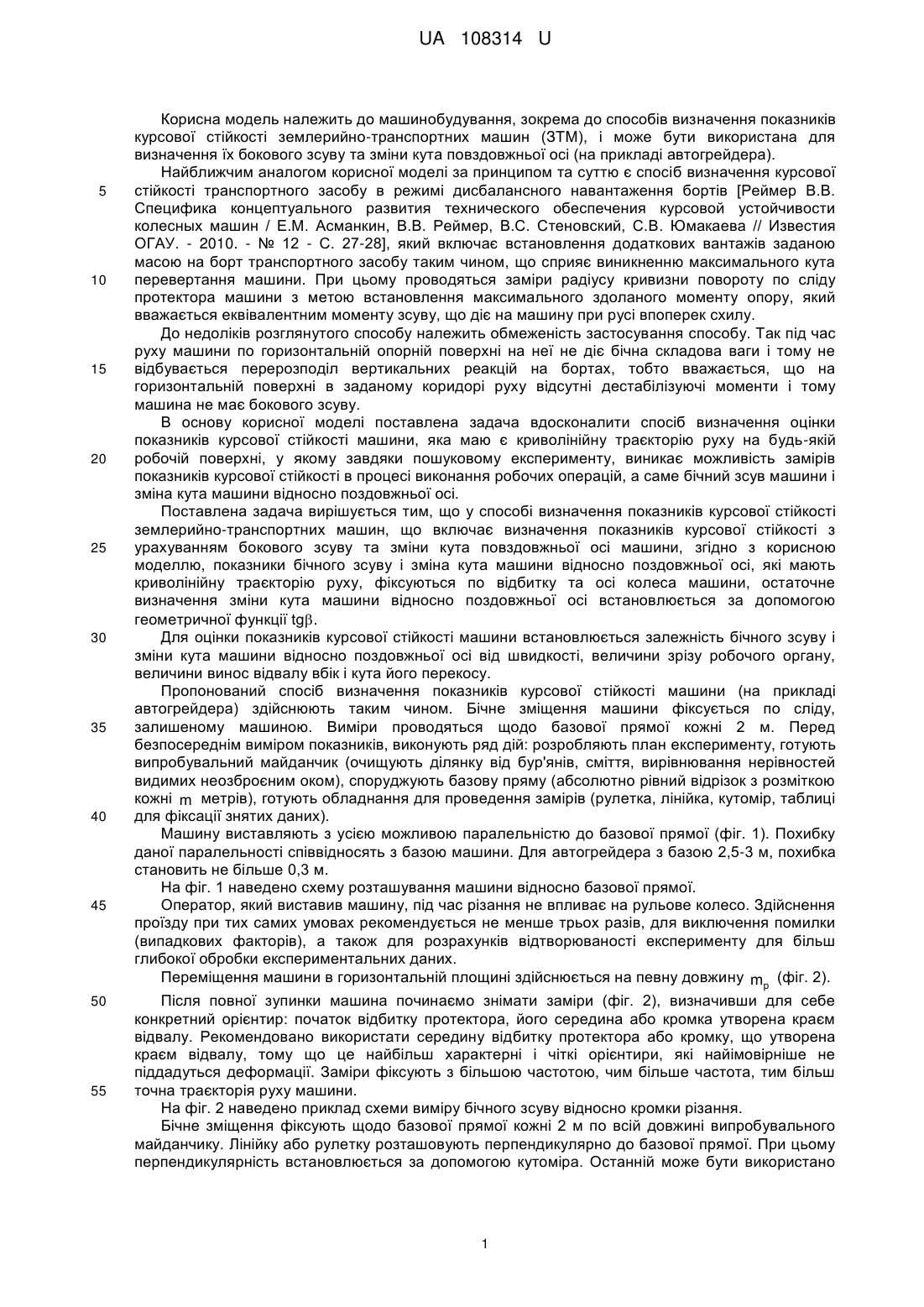
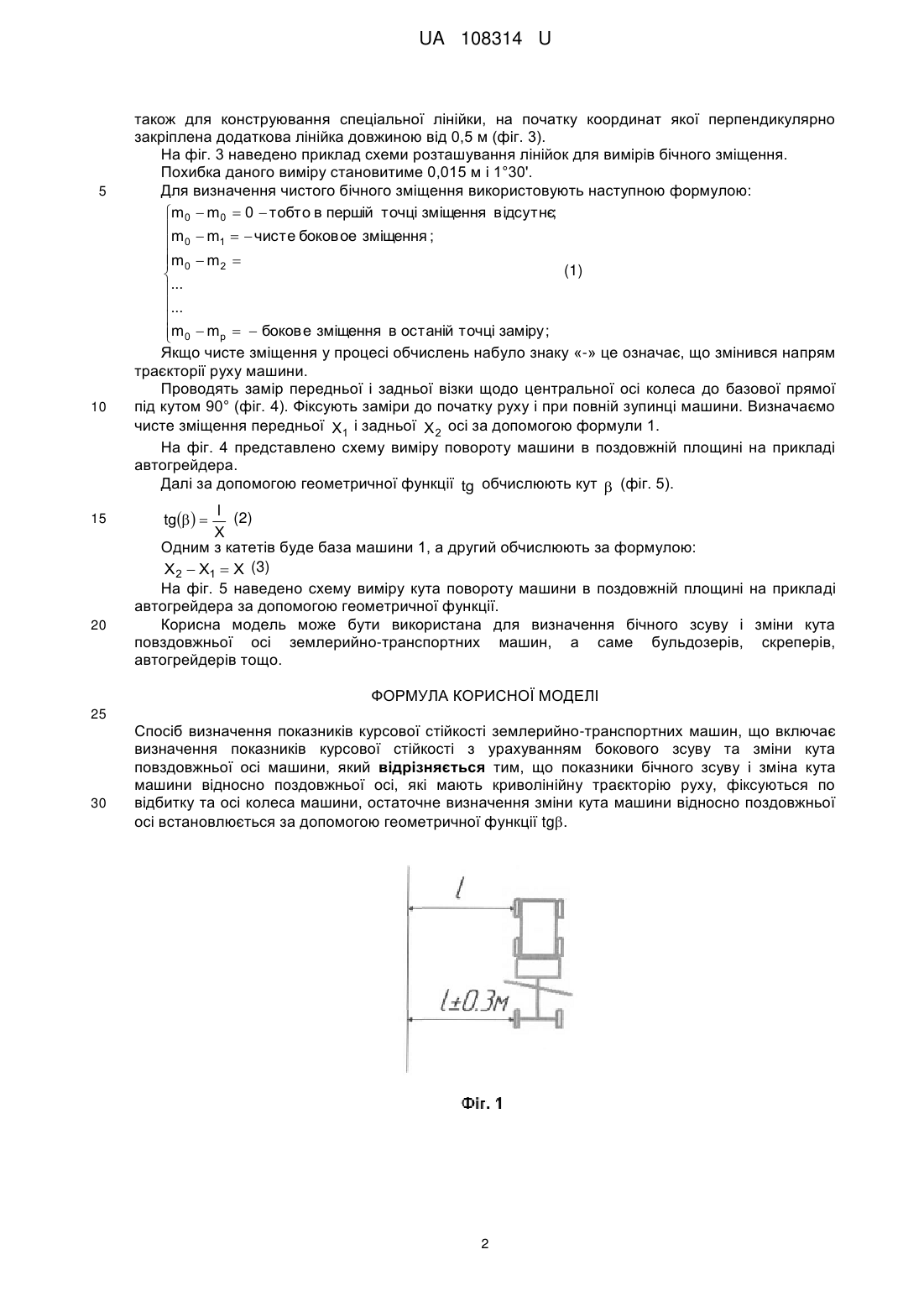
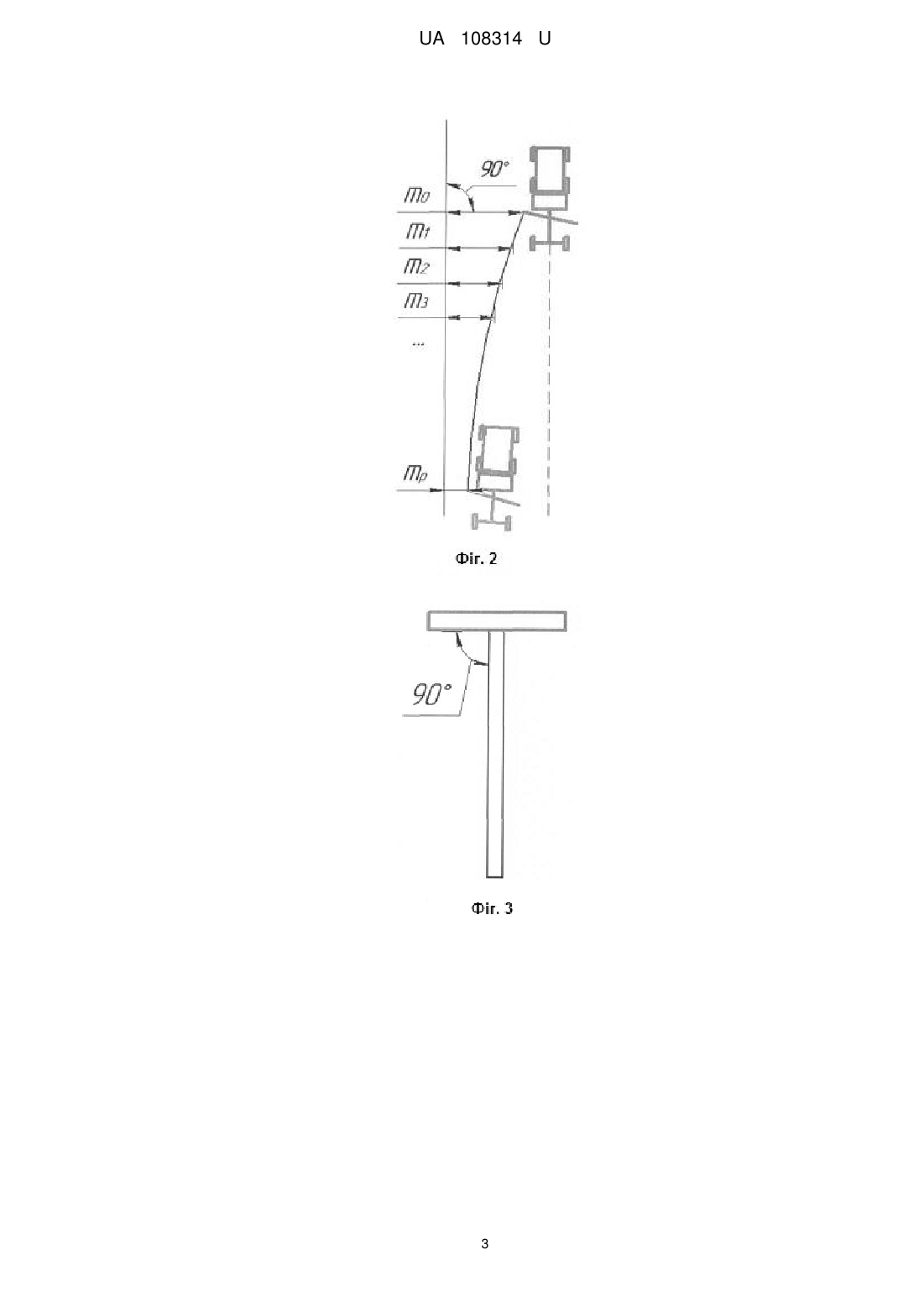
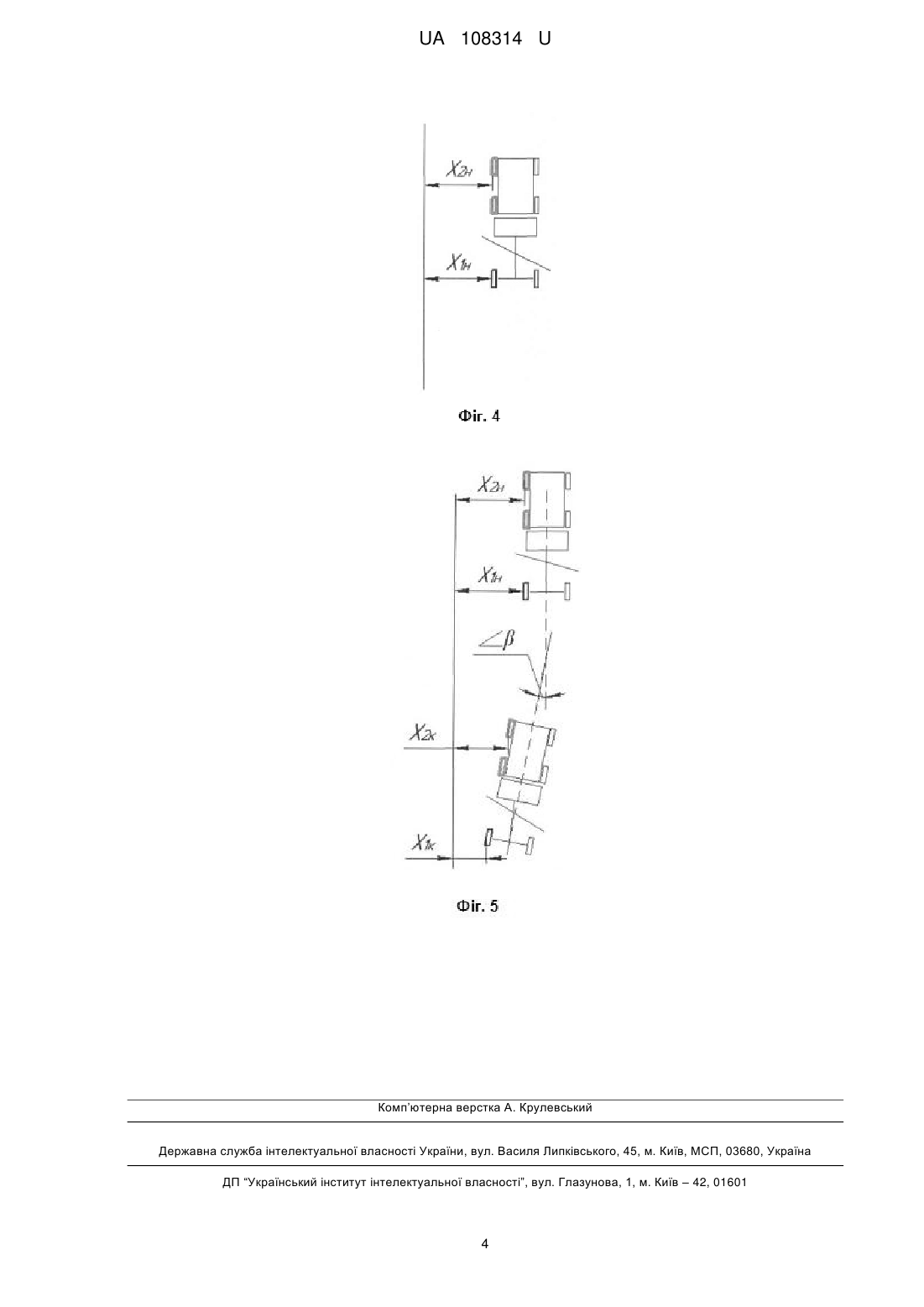
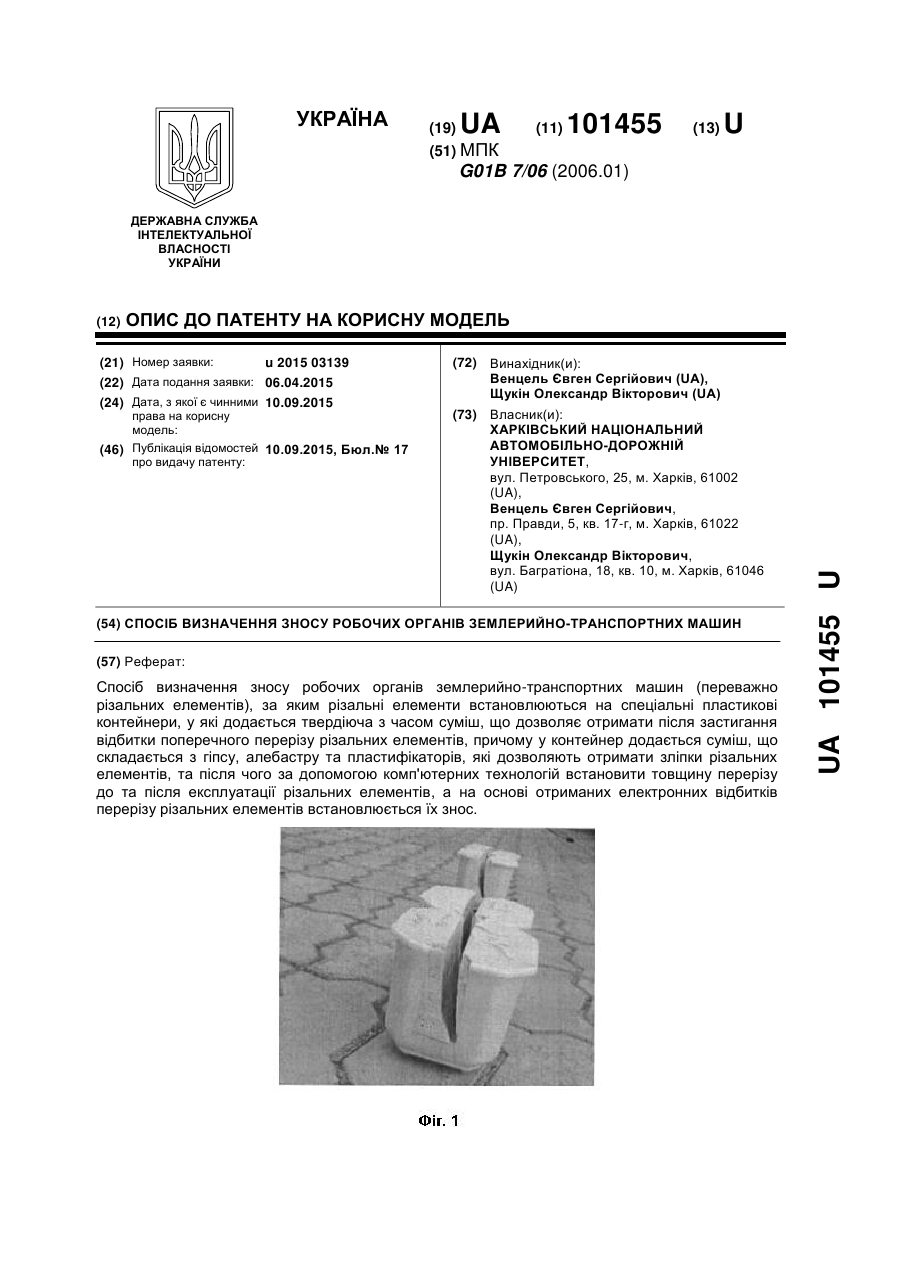
Реферат: Спосіб визначення показників курсової стійкості землерийно-транспортних машин включає визначення показників курсової стійкості з урахуванням бокового зсуву та зміни кута повздовжньої осі машини. Показники бічного зсуву і зміна кута машини відносно поздовжньої осі, які мають криволінійну траєкторію руху, фіксуються по відбитку та осі колеса машини, остаточне визначення зміни кута машини відносно поздовжньої осі встановлюється за допомогою геометричної функції tg. UA 108314 U (12) UA 108314 U UA 108314 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування, зокрема до способів визначення показників курсової стійкості землерийно-транспортних машин (ЗТМ), і може бути використана для визначення їх бокового зсуву та зміни кута повздовжньої осі (на прикладі автогрейдера). Найближчим аналогом корисної моделі за принципом та суттю є спосіб визначення курсової стійкості транспортного засобу в режимі дисбалансного навантаження бортів [Реймер В.В. Специфика концептуального развития технического обеспечения курсовой устойчивости колесных машин / Е.М. Асманкин, В.В. Реймер, B.C. Стеновский, С.В. Юмакаева // Известия ОГАУ. - 2010. - № 12 - С. 27-28], який включає встановлення додаткових вантажів заданою масою на борт транспортного засобу таким чином, що сприяє виникненню максимального кута перевертання машини. При цьому проводяться заміри радіусу кривизни повороту по сліду протектора машини з метою встановлення максимального здоланого моменту опору, який вважається еквівалентним моменту зсуву, що діє на машину при русі впоперек схилу. До недоліків розглянутого способу належить обмеженість застосування способу. Так під час руху машини по горизонтальній опорній поверхні на неї не діє бічна складова ваги і тому не відбувається перерозподіл вертикальних реакцій на бортах, тобто вважається, що на горизонтальній поверхні в заданому коридорі руху відсутні дестабілізуючі моменти і тому машина не має бокового зсуву. В основу корисної моделі поставлена задача вдосконалити спосіб визначення оцінки показників курсової стійкості машини, яка маю є криволінійну траєкторію руху на будь-якій робочій поверхні, у якому завдяки пошуковому експерименту, виникає можливість замірів показників курсової стійкості в процесі виконання робочих операцій, а саме бічний зсув машини і зміна кута машини відносно поздовжньої осі. Поставлена задача вирішується тим, що у способі визначення показників курсової стійкості землерийно-транспортних машин, що включає визначення показників курсової стійкості з урахуванням бокового зсуву та зміни кута повздовжньої осі машини, згідно з корисною моделлю, показники бічного зсуву і зміна кута машини відносно поздовжньої осі, які мають криволінійну траєкторію руху, фіксуються по відбитку та осі колеса машини, остаточне визначення зміни кута машини відносно поздовжньої осі встановлюється за допомогою геометричної функції tg. Для оцінки показників курсової стійкості машини встановлюється залежність бічного зсуву і зміни кута машини відносно поздовжньої осі від швидкості, величини зрізу робочого органу, величини винос відвалу вбік і кута його перекосу. Пропонований спосіб визначення показників курсової стійкості машини (на прикладі автогрейдера) здійснюють таким чином. Бічне зміщення машини фіксується по сліду, залишеному машиною. Виміри проводяться щодо базової прямої кожні 2 м. Перед безпосереднім виміром показників, виконують ряд дій: розробляють план експерименту, готують випробувальний майданчик (очищують ділянку від бур'янів, сміття, вирівнювання нерівностей видимих неозброєним оком), споруджують базову пряму (абсолютно рівний відрізок з розміткою кожні m метрів), готують обладнання для проведення замірів (рулетка, лінійка, кутомір, таблиці для фіксації знятих даних). Машину виставляють з усією можливою паралельністю до базової прямої (фіг. 1). Похибку даної паралельності співвідносять з базою машини. Для автогрейдера з базою 2,5-3 м, похибка становить не більше 0,3 м. На фіг. 1 наведено схему розташування машини відносно базової прямої. Оператор, який виставив машину, під час різання не впливає на рульове колесо. Здійснення проїзду при тих самих умовах рекомендується не менше трьох разів, для виключення помилки (випадкових факторів), а також для розрахунків відтворюваності експерименту для більш глибокої обробки експериментальних даних. Переміщення машини в горизонтальній площині здійснюється на певну довжину mp (фіг. 2). Після повної зупинки машина починаємо знімати заміри (фіг. 2), визначивши для себе конкретний орієнтир: початок відбитку протектора, його середина або кромка утворена краєм відвалу. Рекомендовано використати середину відбитку протектора або кромку, що утворена краєм відвалу, тому що це найбільш характерні і чіткі орієнтири, які найімовірніше не піддадуться деформації. Заміри фіксують з більшою частотою, чим більше частота, тим більш точна траєкторія руху машини. На фіг. 2 наведено приклад схеми виміру бічного зсуву відносно кромки різання. Бічне зміщення фіксують щодо базової прямої кожні 2 м по всій довжині випробувального майданчику. Лінійку або рулетку розташовують перпендикулярно до базової прямої. При цьому перпендикулярність встановлюється за допомогою кутоміра. Останній може бути використано 1 UA 108314 U 5 10 15 20 також для конструювання спеціальної лінійки, на початку координат якої перпендикулярно закріплена додаткова лінійка довжиною від 0,5 м (фіг. 3). На фіг. 3 наведено приклад схеми розташування лінійок для вимірів бічного зміщення. Похибка даного виміру становитиме 0,015 м і 1°30'. Для визначення чистого бічного зміщення використовують наступною формулою: m0 m0 0 тобто в першій точці зміщення відсутнє; m m чисте боковое зміщення ; 1 0 m0 m 2 (1) ... ... m0 mp бокове зміщення в останій точці заміру ; Якщо чисте зміщення у процесі обчислень набуло знаку «-» це означає, що змінився напрям траєкторії руху машини. Проводять замір передньої і задньої візки щодо центральної осі колеса до базової прямої під кутом 90° (фіг. 4). Фіксують заміри до початку руху і при повній зупинці машини. Визначаємо чисте зміщення передньої X1 і задньої X 2 осі за допомогою формули 1. На фіг. 4 представлено схему виміру повороту машини в поздовжній площині на прикладі автогрейдера. Далі за допомогою геометричної функції tg обчислюють кут (фіг. 5). l (2) X Одним з катетів буде база машини 1, а другий обчислюють за формулою: X2 X1 X (3) На фіг. 5 наведено схему виміру кута повороту машини в поздовжній площині на прикладі автогрейдера за допомогою геометричної функції. Корисна модель може бути використана для визначення бічного зсуву і зміни кута повздовжньої осі землерийно-транспортних машин, а саме бульдозерів, скреперів, автогрейдерів тощо. tg ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб визначення показників курсової стійкості землерийно-транспортних машин, що включає визначення показників курсової стійкості з урахуванням бокового зсуву та зміни кута повздовжньої осі машини, який відрізняється тим, що показники бічного зсуву і зміна кута машини відносно поздовжньої осі, які мають криволінійну траєкторію руху, фіксуються по відбитку та осі колеса машини, остаточне визначення зміни кута машини відносно поздовжньої осі встановлюється за допомогою геометричної функції tg. 2 UA 108314 U 3 UA 108314 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: визначення, стійкості, показників, машин, спосіб, землерийно-транспортних, курсової
Код посилання
<a href="https://ua.patents.su/6-108314-sposib-viznachennya-pokaznikiv-kursovo-stijjkosti-zemlerijjno-transportnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення показників курсової стійкості землерийно-транспортних машин</a>
Спосіб визначення зносу робочих органів землерийно-транспортних машин
Номер патенту: 101455
Опубліковано: 10.09.2015
Автори: Венцель Євген Сергійович, Щукін Олександр Вікторович
МПК: G01B 7/06
Мітки: землерийно-транспортних, зносу, органів, визначення, спосіб, робочих, машин
Формула / Реферат:
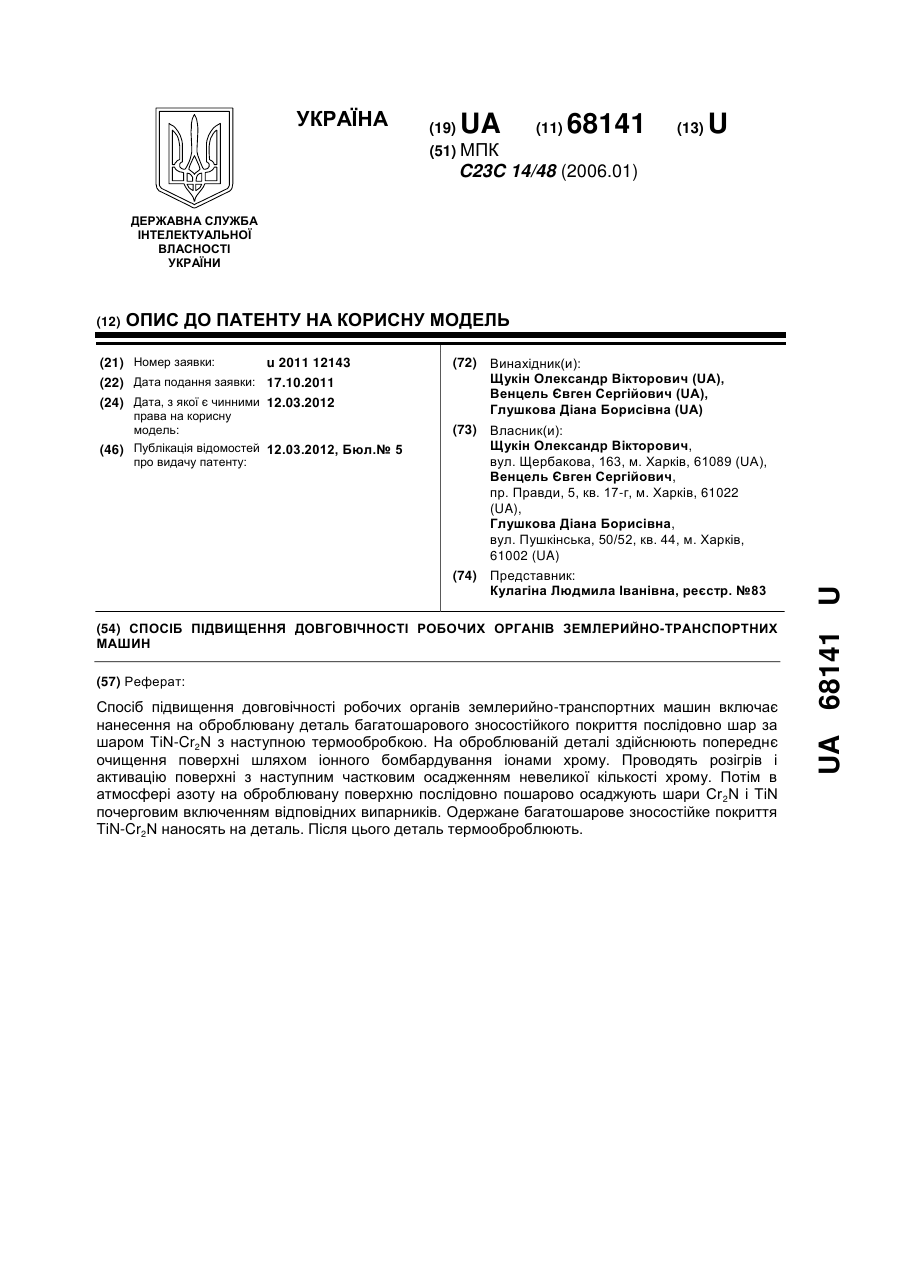
Спосіб визначення зносу робочих органів землерийно-транспортних машин (переважно різальних елементів), за яким різальні елементи встановлюються на спеціальні пластикові контейнери, у які додається твердіюча з часом суміш, що дозволяє отримати після застигання відбитки поперечного перерізу різальних елементів, який відрізняється тим, що у контейнер додається суміш, що складається з гіпсу, алебастру та пластифікаторів, які дозволяють отримати...
Спосіб підвищення курсової стійкості колісного транспортного засобу під час руху в поворотах
Номер патенту: 54332
Опубліковано: 10.11.2010
Автори: Залипка Василь Дарійович, Шабатура Юрій Васильович
МПК: B61F 5/02
Мітки: засобу, підвищення, поворотах, курсової, руху, транспортного, стійкості, колісного, спосіб
Формула / Реферат:
Спосіб підвищення курсової стійкості колісного транспортного засобу під час руху в поворотах, що полягає у зменшенні моментів перекидання, який відрізняється тим, що виконують зміну тиску в шинах коліс транспортного засобу, причому у внутрішніх, по відношенню до траєкторії повороту, шинах коліс тиск зменшують, а у зовнішніх, по відношенню до траєкторії повороту, шинах коліс тиск збільшують, що приводить до збільшення ефективного радіуса...
Спосіб підвищення довговічності робочих органів землерийно-транспортних машин
Номер патенту: 68141
Опубліковано: 12.03.2012
Автори: Венцель Євген Сергійович, Глушкова Діана Борисівна, Щукін Олександр Вікторович
МПК: C23C 14/48
Мітки: органів, землерийно-транспортних, машин, довговічності, підвищення, робочих, спосіб
Формула / Реферат:
Спосіб підвищення довговічності робочих органів землерийно-транспортних машин, переважно їх ріжучих елементів, при якому використовують іонно-плазмове нанесення покриття заданої товщини й характеристик методом конденсації речовин в умовах іонного бомбардування, протягом часу й при певних режимах, який відрізняється тим, що на оброблювану деталь наносять багатошарове зносостійке покриття послідовно шар за шаром TiN-Cr2N, що чергуються, з...
Спосіб випробовування на знос робочих органів землерийно-транспортних машин
Номер патенту: 81060
Опубліковано: 25.06.2013
Автори: Онопрієнко Сергій Володимирович, Щукін Олександр Вікторович, Венцель Євген Сергійович
МПК: G01N 3/56
Мітки: випробовування, знос, землерийно-транспортних, органів, робочих, спосіб, машин
Формула / Реферат:
Спосіб випробовування на знос робочих органів землерийно-транспортних машин (переважно ріжучих елементів), за яким фрагмент ріжучого елемента (випробувальний зразок) обертається з заданою постійною швидкістю і взаємодіє з абразивним середовищем, який відрізняється тим, що випробувальний зразок (реальний ріжучий елемент), встановлений у завантажувальному бункері та зафіксований за допомогою спеціального пристрою - вилки, зношується...
Пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин

Номер патенту: 47748
Опубліковано: 25.02.2010
Автори: Терещук Зоя Михайлівна, Митрофанов Олександр Петрович, Лілевман Ігор Йосипович, Лілевман Олександр Йосипович
МПК: G01M 1/00
Мітки: визначення, мобільних, машин, стійкості, кута, статичної, граничного, пристрій, поперечної
Формула / Реферат:
1. Пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин, що містить рухому частину з робочою площиною (1), яка може повертатися навколо горизонтальної осі, механізм її повертання (2) і маятниковий кутомір (3), який встановлюється на цій площині, який відрізняється тим, що є переносним і малогабаритним, забезпечує визначення граничного кута поперечної статичної стійкості методом моделювання контуру опорної...
Попередній патент: Спосіб діагностики розвитку остеопорозу
Наступний патент: Електрогідравлічний гальмівний пристрій в системі безпеки автомобіля
Випадковий патент: Спосіб моделювання гострого брижового лімфаденіту