Система розпізнавання
Номер патенту: 10887
Опубліковано: 25.12.1996
Автори: Кулініч Олег Миколайович, Берека Сергій Валерійович, Ляшенко Іван Сергійович, Толюпа Сергій Васильович, Новіков Володимир Пилипович, Балаба Валерій Акімович
Формула / Реферат
Система распознавания, содержащая антенну и последовательно соединенные аналого-цифровой преобразователь и первый блок сдвигающих регистров, вход синхронизатора которого соединен с трактирующим входом аналого-цифрового преобразователя, входом второго блока задержки и выходом первого блока задержки, вход которого соединен с выходом первого элемента II, первый вход которого соединен с входом элемента НЕ, вторым входом ключа, входом установки в нуль RS-триггера, входом установки в нуль регистра кодов дальности и соединен с управляющим входом устройства распознавания, причем информационные выходы первого блока сдвигающих регистров соединены с соответствующими адресными входами блоков постоянных запоминающих устройств, выходы которых соединены с соответствующими информационными входами блоков сумматоров, соответствующие информационные выходы которых соединены с соответствующими информационными входами второго блока сдвигающих регистров, соответствующими входами блоков устройств выбора максимума, выходы которых соединены с входами устройства выбора максимума, выходы которого соединены с входами блока элементов ИЛИ, выходы которого соединены с входами индикатора, причем управляющий вход измерителя дисперсии шума соединен с выходом генератора тактовых импульсов, вторым входом первого элемента И и первым входом второго элемента И, первый вход которого соединен с выходом RS-триггера, вход установки в единицу которого соединен с установочным входом устройства распознавания, выход второго элемента И соединен со счетным входом счетчика импульсов, выходы которого соединены с соответствующими входами регистра кодов дальности, выходы которого соединены с соответствующими входами цифроаналогового преобразователя, выход которого соединен с опорным входом аналого-цифрового преобразователя, вход установки в ноль счетчика импульсов соединен с вторыми управляющими входами второго блока сдвигающих регистров, выходом формирователя импульсов, вход которого соединен с выходом элемента НЕ и входом установки нуль первого блока сдвигающих регистров, выход второго блока задержки соединен с первыми входами второго блока сдвигающих регистров, информационные выходы измерителя дисперсии шума соединены с соответствующими входами блоков постоянных запоминающих устройств, отличающаяся тем, что содержит широкополосный усилитель, фильтр коррекции фазовых искажений, многоканальный генератор импульсов и блок излучательных модулей, причем выход антенны соединен со входом широкополосного усилителя, а его выход подключен ко входу ключа, выход которого соединен со входом фильтра коррекции фазовых искажений, выход которого соединен с объединенными информационными входами аналого-цифрового преобразователя и измерителя дисперсии шума, при этом второй выход генератора тактовых импульсов соединен со входом многоканального генератора импульсов, соответствующие выходы которого соединены с входам излучательных модулей блока излучательных модулей.
Текст
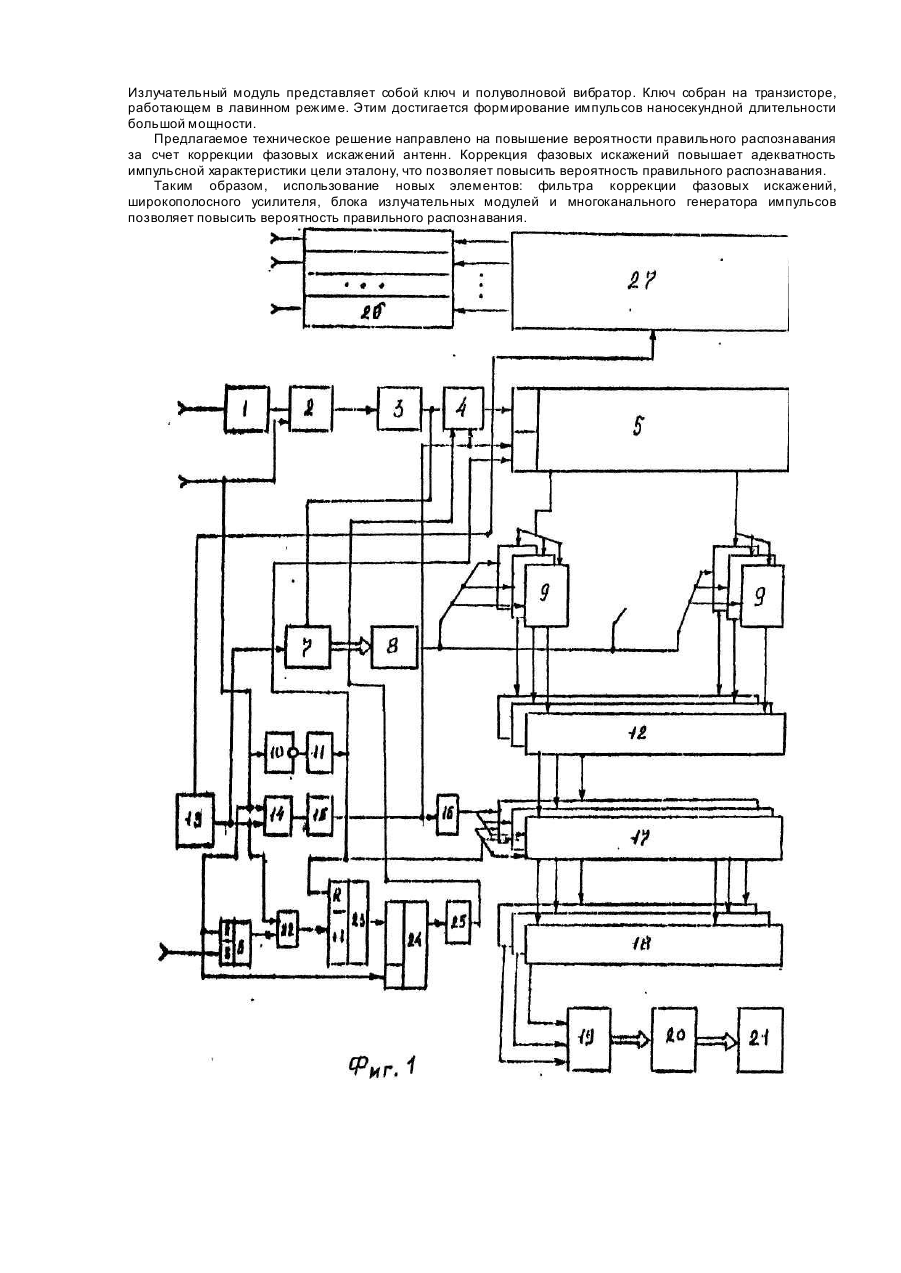
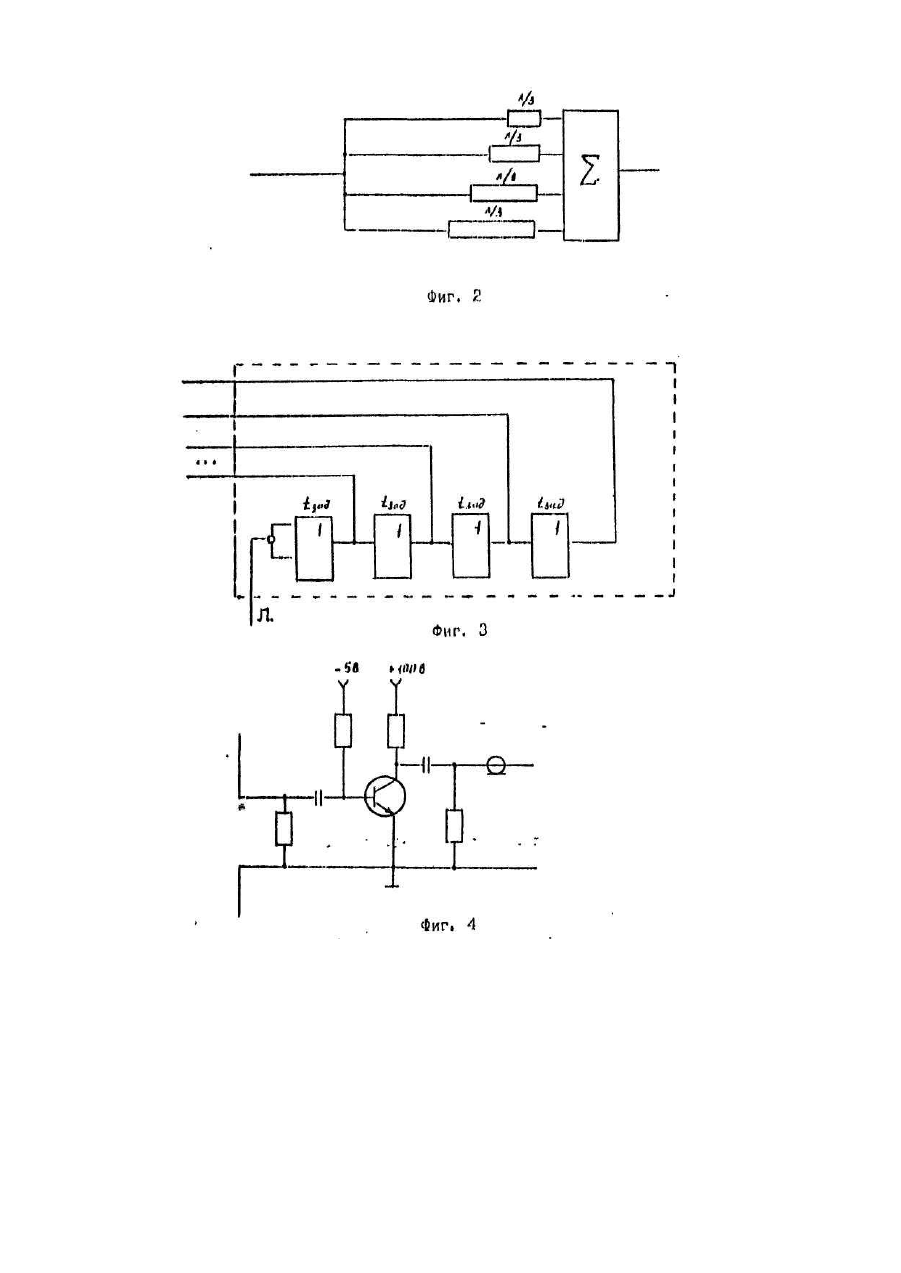
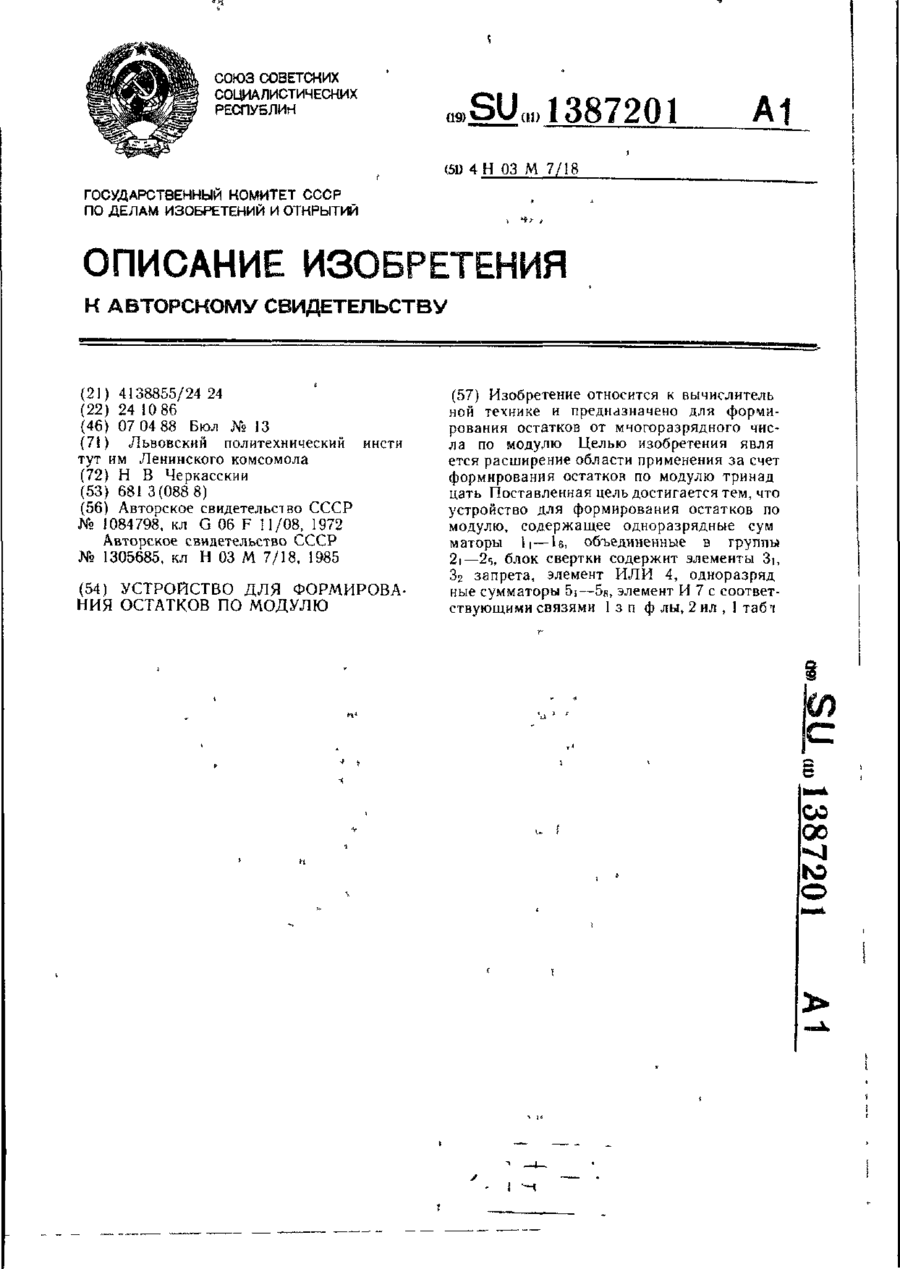
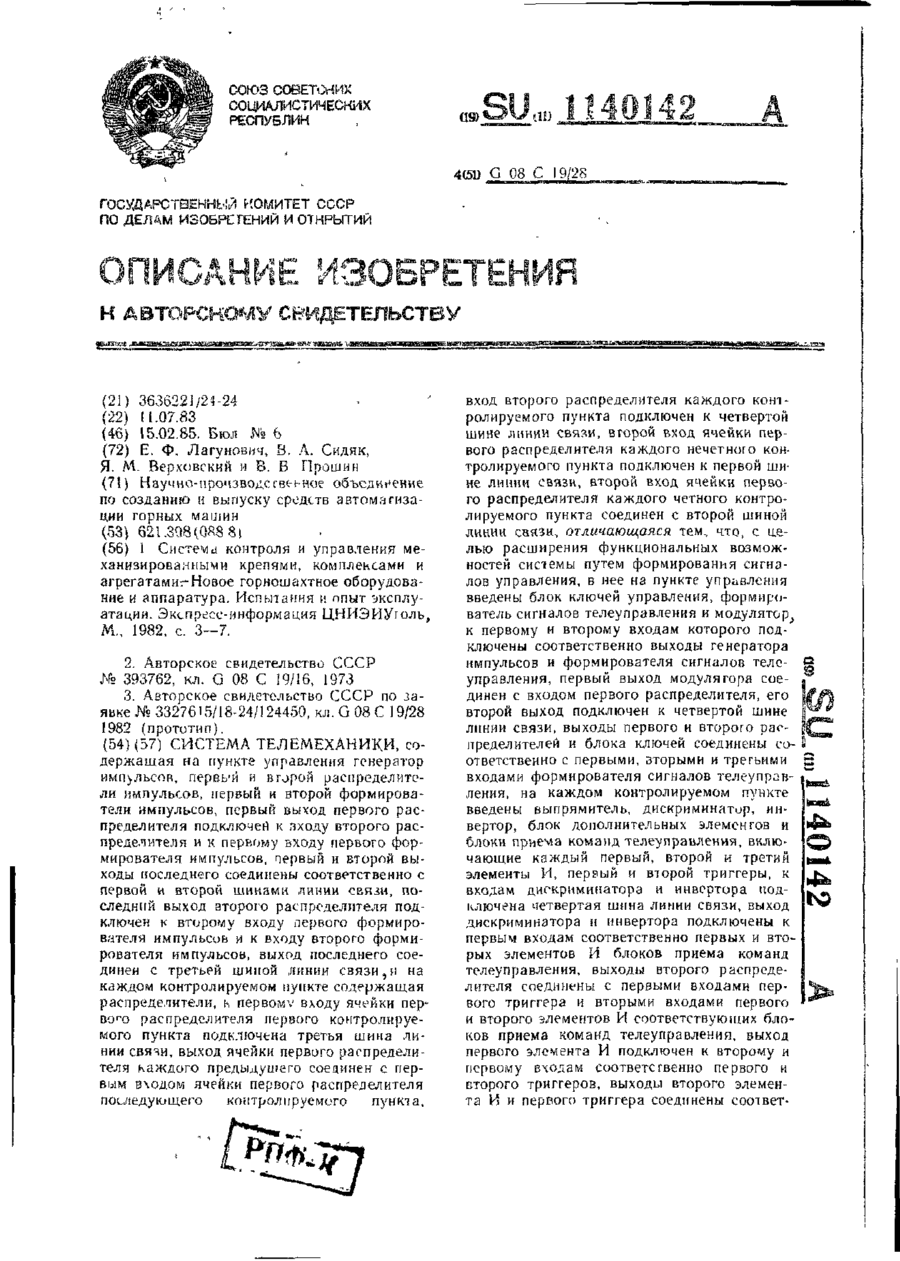
Предполагаемое изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях, позволяющих получить сверхвысокое разрешение по дальности за счет использования наносекундных зондирующих импульсов для распознавания классов воздушных объектов в интересах поддержки принятия решений оператором в условиях априорной неопределенности. Наиболее близким техническим решением предлагаемому решению является устройство распознавания радиолокационных сигналов, содержащее дешифратор, первый блок задержки, второй блок задержки, три регистра, три сумматора и последовательно соединенные антенну, приемник, амплитудный детектор, ключ и АЦП, последовательно соединетные блок элементов ИЛИ и индикатор, последовательно соединенные RSтриггер, второй элемент И, счетчик импульсов, регистр кодов дальности ЦАП, выход которого соединен с опорным входом АЦП, последовательно соединенные элемент НЕ, вход которого соединен со входом управляющего импульса устройства распознавания радиолокационных сигналов, вторым входом ключа, Rвходом RS триггера и входом разрешения приема информации регистра кодов дальности, и формирователь импульсов, выход которого соединен с R входом счетчика импульсов, причем выход генератора тактовых импульсов соединен со вторыми входами первого и второго элементов И, a S вход RS триггера соединен с синхронизирующим входом устройства распознавания радиолокационных сигналов, причем выходы первого блока сдвигающих регистров соединены с адресными входами блоков ПЗУ, информационные входы которых соединены с соответствующими входами блоков сумматоров, выходы которых соединены с соответствующими входами второго блока сдвигающих регистров, выходы которого соединены с соответствующими входами блока устройств выбора максимума, входы которого соединены с соответствующими входами устройства выбора максимума, выходы которого соединены с входами блока эталонов ИЛИ, причем управляющие входы блоков ПЗУ соединены с входами дешифратора, входы которого соединены с выходами измерителя дисперсии шума, второй вход которого соединен с выходом амплитудного детектора, а первый вход - с вы ходом генератора тактовых импульсов, при этом последовательно соединенные первый элемент И, первый блок задержки, выход которого соединен с первым входом второго блока сдвигающих регистров, вторые входы которого соединены с выходом формирователя импульсов И входом первого блока сдвигающих регистров, вход сдвига которого соединен с тактирующим входом АЦП и выходом первого блока задержки, причем, первый вход первого элемента И соединен с входом элемента НЕ, Работа известного устройства заключается в следующем. Принятый приемником отраженный ЛЧМ сигнал обрабатывается и поступает на амплитудный детектор. На его выходе формируется радиолокационный портрет, который через ключ поступает на вход аналого-цифрового преобразователя (АЦП). Последовательность дискретных переменных Uk, k=0,1,...,n-1 на выходе аналого-цифрового преобразователя, принимающих значения xa, a =1,2.....r при независимых отсчетах можно аппроксимировать регулярными неоднородными n =0 - связными цепями Маркова с г состояниями. Здесь r-число уровней квантования, n - число отсчетов радиолокационного портрета в стробе дальности, В этом случае многомерные распределения вероятностей радиолокационного портрета с шумом для m-το класса и шума можно записать следующим образом: Логарифм этого отношения является достаточной статистикой для принятия решения о принадлежности принимаемой реализации к m-му классу, m =1,2.....Μ, Алгоритм принятия решения, что принимаемая реализация относится к m-му классу, заключается в вычислении и определении m , соответствующего максимальному из вычисленных значений ΙnΙm (U). Выборки Uk с выхода аналого-цифрового преобразователя записываются в первый блок сдвигающих регистров. Разрядные входы сдвигающи х регистров являются адресными входами блока постоянных запоминающих устройств, в котором записаны весовые коэффициенты С помощью блоков сумматоров образуется Μ отношений правдоподобия Inl1(U), lnl2(U).....InIm (U),...ІnІm (U)для М классов целей. Устройство выбора максимума определяет номер сумматора μ максимальным InIm (U) и код класса цели отражается на индикаторе. В устройстве производится определение максимального отношения правдоподобия в ожидаемом интервале появления цели. Для этого текущие значения \η\μ (U) вводятся во второй блок сдвигающих регистров. После получения Μ отношений правдоподобия блок устройств выбора максимума определяет максимальное значение отношений правдоподобия в ожидаемом интервале появления цели, которые подаются на устройство выбора максимума. Весовые коэффициенты Φαμ (к)зависят от дисперсии шума. Поэтому в устройстве предусмотрена их коррекция в зависимости от дисперсии шума. Для этого используется переключение постоянных запоминающих устройств посредством первого дешифратора по результатам измерений дисперсии шума. В данном устройстве предполагается, что геометрической структуре воздушной цели соответствует адекватная структура радиолокационного портрета, представляющего совокупность импульсных характеристик каждой блестящий точки. Однако за счет искажения фазовой структуры сигналов антеннами при излучении и приеме сверхширокополосных сигналов импульсная характеристика одной блестящей точки будет теперь представлять их некоторую совокупность, которая будет определяться параметрами антенны. Этим нарушается адекватность геометрической и сигнальной структуры цели, что затрудняет их сопоставление, а следовательно и снижается вероятность правильного распознавания. Задачей изобретения является повышение вероятности правильного распознавания за счет учета при распознавании искажения фазовых структур сигналов антеннами при облучении целей импульсами наносекундной длительности, позволяющих получи ть сверхвысокое разрешение. Поставленная задача достигается тем, что в известное устройство, содержащее антенну и последовательно соединенные аналого-цифровой преобразователь и первый блок сдвигающих регистров, вход син хронизации которого соединен с тактирующим входом аналого-цифрового преобразователя, входом второго блока задержки и выходом первого блока задержки, вход которого соединен с выходом первого элемента И, первый вход которого соединен с входом элемента НЕ, вторым входом ключа, входом установки в нуль RS-триггера, входом установки в нуль регистра кодов дальности и соединен с управляющим входом устройства распознавания, причем информационные выходы первого блока сдвигающих регистров соединены с соответствующими адресными входами блоков постоянных запоминающих устройств, вы ходы которых соединены с соответствующими информационными входами блоков сумматоров, соответствующие информационные выходы которых соединены с соответствующими информационными входами второго блока сдвигающи х регистров, соответствующие информационные выходы которых соединены с соответствующими входами блоков устройств выбора максимума, выходы которых соединены с входами устройств выбора максимума, выходы которого соединены с входами блока элементов ИЛИ, выходы которого соединены с входами индикатора, причем управляющий вход измерителя дисперсии шума соединен с выходом генератора тактовых импульсов, вторым входом первого элемента И и первым входом второго элемента И, первый вход которого соединен с выходом RS-триггера, вход установки в единицу которого соединен с установочным входом устройства распознавания, выход второго элемента И соединен со счетным входом счетчика импульсов, выходы которого соединены с соответствующими входами регистра кодов дальности, выходы которого соединены с соответствующими входами цифроаналогового преобразователя, выход которого соединен с опорным входом аналогоцифрового преобразователя, вход установки в ноль счетчика импульсов соединен с вторыми управляющими входами второго блока сдвигающих регистров, выходом формирователя импульсов, вход которого соединен с выходом элемента НЕ и входом установки нуль первого блока сдвигающих регистров, выход второго блока задержки соединен с первыми входами второго блока сдвигающих регистров, мн-формационные выходы измерителя дисперсии шума соединены с соответствующими входами дешифратора, соответствующие вы ходы которого соединены с соответствующими входами блоков постоянных запоминающих устройств, введен широкополосный усилитель, фильтр коррекции фазовых искажений, многоканальный генератор импульсов и блок иэлучательных модулей, причем выход антенны соединен со входом широкополосного усилителя, а его выход подключен ко входу ключа, выход которого соединен со входом фильтра коррекции фазовых искажений, выход которого соединен с объединенными информационными входами аналогово-цифрового преобразователя и измерителя дисперсии шума, при этом второй выход генератора тактовых импульсов соединен со входом многоканального генератора импульсов, соответствующие выходы которого соединены с входами излучательных модулей блока излу-чательных модулей. На фиг. 1 представлена структурная схема устройства распознавания. На фиг. 2 представлена структурная схема фильтра коррекции фазовых искажений. На фиг. 3 приведена структурная схема многоканального генератора импульсов. На фиг. 4 приведен вариант схемы излучательного модуля. Устройство распознавания (см. фиг. 1) широкополосный усилитель 1, ключ 2, фильтр коррекции фазовых искажений 3, аналого-цифровой преобразователь 4, первый блок сдвигающих регистров 5, RS триггер 6, измеритель дисперсии шума 7, де шифратор 8, блоки постоянных запоминающих устройств 9. Элемент НЕ 10, формирователь импульсов 11, блоки сумматоров 12, генератор тактовых импульсов 13, первый элемент И 14, первый блок задержки 15, второй блок задержки 16, второй блок сдвигающих регистров 17, блоки устройства выбора максимума 18, устройство выбора максимума 19, блок элементов ИЛИ 20, индикатор 21, второй элемент И 22, счетчик импульсов 23, регистр кодов дальности 24, цифроаналоговый преобразователь 25, блок излучателей 26, многоканальный генератор импульсов 27. Устройство распознавания содержит антенну и последовательно соединенные аналого-цифровой преобразователь 4 и первый блок сдвигающих регистров 5, вход синхронизации которого соединен с тактирующим входом аналого-цифрового преобразователя 4, входом второго блока задержки 16 и выходом первого блока задержки 15, вход которого соединен с выходом первого элемента И 14, первый вход которого соединен с входом элемента НЕ 10, вторым входом ключа 2, входом установки в нуль RS-триггера 6, входом установки в нуль регистра кодов дальности 24 и соединен с управляющим входом устройства распознавания, причем информационные выходы первого блока сдвигающих регистров 5 соединены с соответствующими адресными входами блоков постоянных запоминающих устройств 9, выходы которых соединены с соответствующими информационными входами блоков сумматоров 12, соответствующие информационные выходы которых соединены с соответствующими информационными входами второго блока сдвигающих регистров 17, соответствующие информационные выходы которых соединены с соответствующими входами блоков устройств выбора максимума 18, выходы которых соединены с входами устройств выбора максимума 19, выходы которого соединены с входами блока элементов ИЛИ 20, выходы которого соединены с входами индикатора 21, причем управляющий вход измерителя дисперсии шума 7 соединен с выходом генератора тактовых импульсов 13, вторым входом первого элемента И 14 и первым входом второго элемента И 22, первый вход которого соединен с выходом RS-триггера 6, вход установки в единицу которого соединен с установочным входом устройства распознавания, выход второго элемента И 22 соединен со счетным входом счетчика импульсов 23, выходы которого соединены с соответствующими входами регистра кодов дальности 24, выходы которого соединены с соответствующими входами цифроаналогового преобразователя 25. выход которого соединен с опорным входом аналого-цифрового преобразователя 4, вход установки в ноль счетчика импульсов 23 соединен с вторыми управляющими входами второго блока сдвигающих регистров 17, выходом формирователя импульсов 11, вход которого соединен с выходом элемента НЕ 10 и входом установки нуль первого блока сдвигающих регистров 5, вы ход второго блока задержки 16 соединен с первыми входами второго блока сдвигающих регистров 17, информационные выходы измерителя дисперсии шума 7 соединены с соответствующими входами дешифратора 8, соответствующие выходы которого соединены с соответствующими входами блоков постоянных запоминающих устройств 9, введен широкополосный усилитель 1, фильтр коррекции фазовых искажений 3, многоканальный генератор импульсов 27 и блок излучательных модулей 26, причем выход антенны соединен со входом широкополосного усилителя 1, а его выход подключен ко входу ключа 2, выход которого соединен со входом фильтра коррекции фазовых искажений 3, выход которого соединен с обьединенными информационными входами аналогово-цифрового преобразователя 4 и измерителя дисперсии шума 7, при этом второй выход генератора тактовых импульсов 13 соединен со входом многоканального генератора импульсов І7, соответствующие выходы которого соединены с входами излучательных модулей блока излучательных модулей 26, Работа предлагаемого устройства распознавания заключается в следующем. Блок излучающи х модулей 26 формирует наносекундный импульс со сложением мощности в пространстве. Его временное положение привязано по времени к импульсам генератора тактовых импульсов 13 за счет фазирования многоканальным генератором импульсов 27. Антенны блока излучательных модулей 26 осуществляют канализацию энергии в пространство. Однако, из-за сверхширокополосности наносекундных импульсов при этом осуществляется искажение фазовой структуры сигнала антеннами. Следовательно, такой блок излучательных модулей формирует сигнал со сложной фазовой структурой. Отраженный от воздушного объекта сигнал будет представлять собой совокупность искаженных импульсных характеристик блестящих точек воздушного объекта. Этот сигнал может быть использован для распознавания класса или типа воздушного объекта. Для получения высоких вероятностей правильного распознавания необходимо скорректировать импульсные характеристики для каждой блестящей точки. Данная задача решается на приемной стороне устройства. Принятый антенной отраженный сигнал усиливается посредством широкополосного усилителя 1, селектируется ключом 2 и поступает на фильтр коррекции фазовых искажений 3. Этот фильтр осуществляет коррекцию фазовых искажений антенн, которые на входе фильтра преобразуются во временные задержки импульсов. Фильтр представляет собой набор линий задержек на каждую спектральную составляющую гзлучаемого сигнала (фиг. 2). Этим осуществляется компенсация искажений фазового спектра антеннами. Время задержки каждой линии выбирается в соответствии с ожидаемым фазовым сдвигом соответствующей спектральной составляющей. На выходе фильтра 3 формируется радиолокационный портрет воздушной цели. Этот портрет посредством ключа 2 селектируется по дальности и поступает на вход аналого-цифрового преобразователя 4. Последовательность дискретных переменных Uk, к=0,1.....n-1 на выходе аналого-цифрового преобразователя, принимающих значения xa, a=1,2,..., r, при независимых отсчетах можно аппроксимировать регулярными неоднородными v=0 - связными цепями Маркова с r состояниями. Здесь r - число уровней квантования, n - число отсчетов радиолокационного портрета в стробе дальности, В этом случае многомерные распределения вероятностей радиолокационного портрета с шумом для a -го класса и шума можно записать следующим образом: где Рa (k) - вероятность события, что переменная Логарифм этого отношения является достаточной статистикой для принятия решения о принадлежности принимаемой реализации к m-му классу, m=1,2.....Μ. Алгоритм принятия решения, что принимаемая реализация относится к m-му классу, заключается в вычислении и определении m, соответствующего максимальному из вычисленных значений ΙnΙ m (U). Выборки Uk с выхода аналого-цифрового преобразователя записываются в первый блок сдвигающих регистров. Разрядные входы сдвигающи х регистров являются адресными входами блока постоянных запоминающих устройств, в котором записаны весовые коэффициенты С помощью блоков сумматоров образуется Μ о тношений правдоподобия Inl1(U), lnl2(U).....ΙnΙm (U).....lnlm (U) для М классов целей. Устройство выбора максимума определяет номер сумматора μ с максимальным ΙnΙ m (U) и код класса цели отражается на индикаторе. В устройстве производится определение максимального отношения правдоподобия в ожидаемом интервале появления цели. Для этого текущие значения ΙnΙ m (U) вводятся во второй блок сдвигающих регистров. После получения Μ отношений правдоподобия блок устройств выбора максимума определяет максимальное значение отношений правдоподобия в ожидаемом интервале появления цели, которые подаются на устройство выбора максимума. Весовые коэффициенты зависят от дисперсии шума. Поэтому в устройстве предусмотрена их коррекция в зависимости от дисперсии шума. Для этого используется переключение постоянных запоминающих устройств посредством первого дешифратора по результатам измерений дисперсии шума. Дисперсию шума измеряет измеритель дисперсии шума 7, который посредством дешифратора 8 управляет входами выбор кристалла блоков ПЗУ 9. Этим осуществляется коммутация ПЗУ 9 по результатам измерения дисперсии шума. Нормировка радиолокационных портретов при изменении расстояние до воздушной цели реализуется за счет изменения опорного напряжения на аналого-цифровом преобразователе 4. Дальность до цели измеряется посредством преобразователя временного интервала в код собранного на RS-триггере 6, втором логическом элементе И 22, счетчике импульсов дальности 23 и регистре кодов дальности 24. Опорное напряжения для аналого-цифрового преобразователя образуется посредством цифроаналогового преобразователя 25. Синхронизация всех элементов устройства распознавания осуществляется посредством генератора тактовых импульсов 13, первого элемента И 14, элемента НЕ 10, формирователя импульсов 11, первого 15 и второго 16 блоков задержки. Эти элементы формируют последовательность управляющих импульсов с необходимыми временными задержками. В качестве элементов использованы интегральные микросхемы серии К100. Блоки постоянных запоминающих устройств могут быть выполнены на интегральных микросхемах 573 серии. Блоки сумматоров могут быть реализованы на интегральных микросхемах К100ИМ180. Аналого-цифровой преобразователь может быть построен на интегральных микросхемах 1107ПВ1, 1107ПВ2, 1107ПВЗ. Блоки сдвигающих регистров могут быть выполнены на интегральных микросхемах 1500 серии. Блоки устройств выбора максимума могут быть построены на интегральных схемах цифровых компараторов 555СП1. Остальные элементы устройства могут быть выполнены на интегральных схемах средней степени интеграции. В качестве линий задержек в фильтре коррекции фазовых искажений могут быть использованы отрезки коаксиальных кабелей, каждый сантиметр которого соответствует задержке на 0,1 не. Многоканальный генератор импульсов представляет собой, набор последовательно включенных логических элементов. За счет внутренней задержки t обеспечивается формирование сетки импульсов с соответствующей задержкой. Излучательный модуль представляет собой ключ и полуволновой вибратор. Ключ собран на транзисторе, работающем в лавинном режиме. Этим достигается формирование импульсов наносекундной длительности большой мощности. Предлагаемое техническое решение направлено на повышение вероятности правильного распознавания за счет коррекции фазовых искажений антенн. Коррекция фазовых искажений повышает адекватность импульсной характеристики цели эталону, что позволяет повысить вероятность правильного распознавания. Таким образом, использование новых элементов: фильтра коррекции фазовых искажений, широкополосного усилителя, блока излучательных модулей и многоканального генератора импульсов позволяет повысить вероятность правильного распознавания.
ДивитисяДодаткова інформація
Назва патенту англійськоюIdentification system
Автори англійськоюBalaba Valerii Yakymovych, Liashenko Ivan Serhiiovych, Bereka Serhii Valeriiovych, Kulinyih Oleh Mykolaiovych, Toliupa Serhii Vasyliovych
Назва патенту російськоюСистема распознавания
Автори російськоюБалаба Валерий Акимович, Ляшенко Иван Сергеевич, Берека Сергей Валерьевич, Кулинич Олег Николаевич, Толюпа Сергей Васильевич
МПК / Мітки
МПК: G01S 13/78, G01S 13/02
Мітки: розпізнавання, система
Код посилання
<a href="https://ua.patents.su/6-10887-sistema-rozpiznavannya.html" target="_blank" rel="follow" title="База патентів України">Система розпізнавання</a>
Нейрокомп’ютерний пристрій розпізнавання повітряних об’єктів

Номер патенту: 9979
Опубліковано: 30.09.1996
Автори: Кулько Аркадій В'ячеславович, Берека Валерій Веніамінович, Гребенюк Андрій Юрійович, Новіков Володимир Пилипович
МПК: G01S 13/02, G01S 13/78
Мітки: об'єктів, пристрій, нейрокомп'ютерний, розпізнавання, повітряних
Формула / Реферат:
Нейтрокомпьютерное устройство распознавания воздушных объектов, содержащее блок управления, состоящий из последовательно соединенных RS-триггера, второго элемента И, счетчика импульсов, регистра кодов дальности и цифроаналогового преобразователя, выход которого является первым выходом блока управления, последовательно соединенных элемента НЕ, вход которого является первым входом блока управления и соединен с R-входом RS-триггера и входом...
Пристрій розпізнавання

Номер патенту: 10885
Опубліковано: 25.12.1996
Автори: Балаба Валерій Акімович, Ляшенко Іван Сергійович, Кулініч Олег Миколайович, Берека Сергій Валерійович, Новіков Володимир Пилипович, Толюпа Сергій Васильович
МПК: G01S 13/02, G01S 13/78
Мітки: пристрій, розпізнавання
Формула / Реферат:
Устройство распознавания, содержащее последовательно соединенные антенну, приемник, амплитудный детектор, ключ, аналого-цифрового преобразователя и первый блок сдвигающих регистров, вход синхронизации которого соединен с трактирующим входом аналого-цифрового преобразователя, входом второго блока задержки и выходом первого блока задержки, вход которого соединен с выходом первого элемента И, первый вход которого соединен с входом элемента...
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Журавель Олександр Павлович, Дяченко Олег Миколайович
МПК: G06F 11/00
Мітки: сигнатурний, аналізатор, багатоканальний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: модулю, залишків, пристрій, формування
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Система телемеханіки
Номер патенту: 7702
Опубліковано: 26.12.1995
Автори: Прошин Володимир Володимирович, Лагунович Євген Федорович, Сидяк Володимир Олександрович, Верховський Яків Маркович
МПК: G08C 19/28
Мітки: телемеханіки, система
Формула / Реферат:
Система телемеханики, содержащая на пункте управления генератор импульсов, первый и второй распределители импульсов, первый и второй формирователи импульсов, первый выход первого распределителя подключен к входу второго распределителя и к первому входу первого формирователя импульсов, первый и второй выходы последнего соединены соответственно с первой и второй шинами линии связи, последний выход второго распределителя подключен к...
Попередній патент: Устрій до пуску перетворювача частоти для регулювання асинхроного короткозамкнутого двигуна
Наступний патент: Спосіб виготування порошкового дроту
Випадковий патент: Бітумно-полімерна композиція