Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування
Формула / Реферат
Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування, який включає генерування безперервних високочастотних коливань з відомими частотами, первинне випромінювання, первинний прийом, зсув частоти, підсилення сигналу в транспондері, вторинне випромінювання, вторинний прийом високочастотних коливань, перемножування в змішувачі повторно прийнятих високочастотних коливань, що спочатку генеруються, вибіркове підсилення однієї з комбінаційних низькочастотних складових різниці коливань, послідовне вимірювання фазового зсуву між виділеним низькочастотним сигналом і сигналом низької частоти місцевого опорного генератора, обчислення відстані по послідовно виміряних різницях фаз, який відрізняється тим, що первинно сформований високочастотний сигнал заздалегідь підсилюють за потужністю і безпосередньо через антену кругової поляризації відомого напряму обертання площини поляризації первинно випромінюють у напрямі антени лінійної поляризації транспондера, при цьому первинно прийнятий антеною лінійної поляризації, підсилений і трансформований по частоті сигнал транспондера повторно випромінюють тією ж антеною лінійної поляризації, повторно приймають у вимірювальній станції іншої, просторово віддаленої від першої, антенної кругової поляризації, напрям обертання площини поляризації якої протилежний напряму обертання площини поляризації хвилі, відбитої від поперечної площі розсіювання об'єкта, на якому встановлений транспондер, при цьому повторно прийнятий сигнал транспондера додатково підсилюють.
Текст
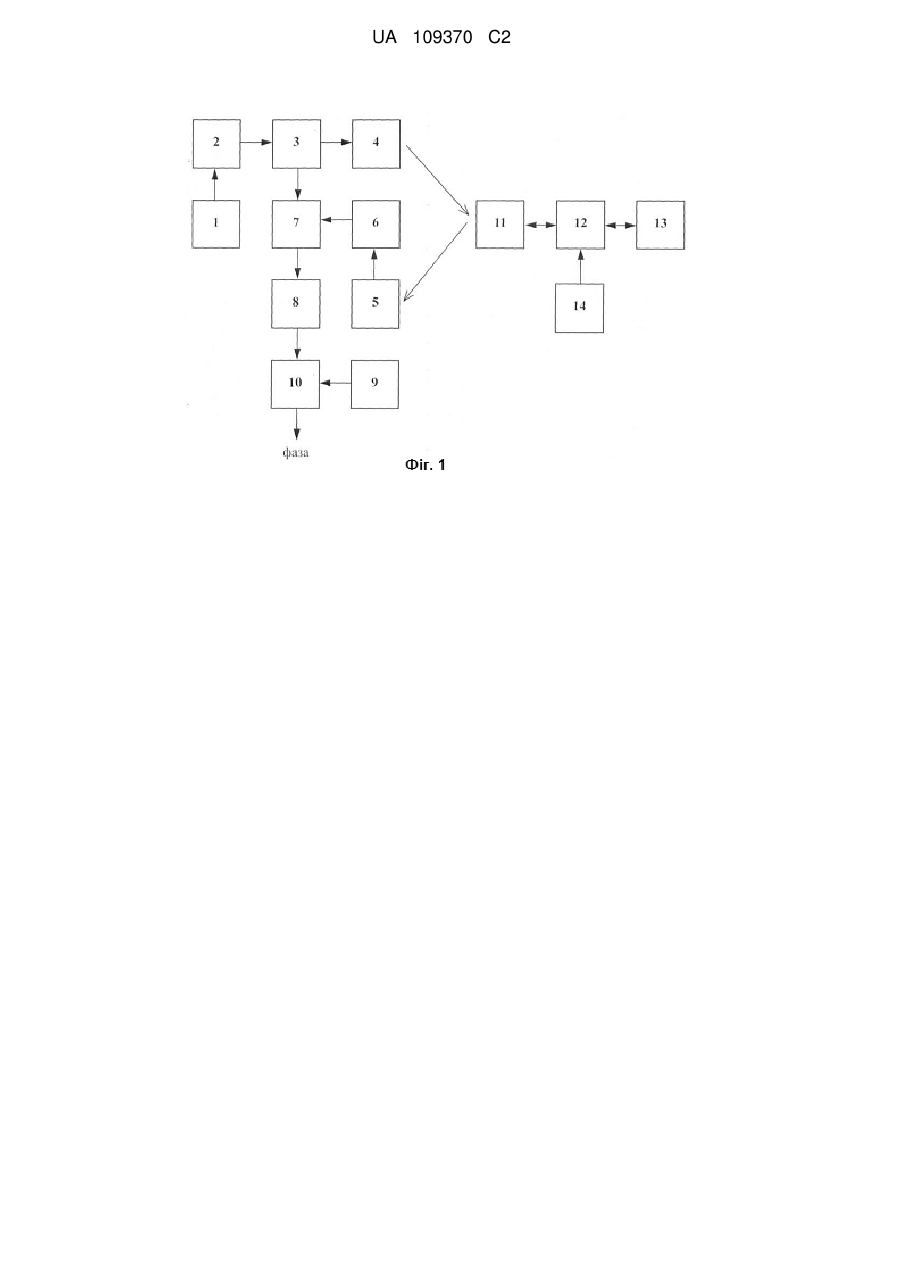
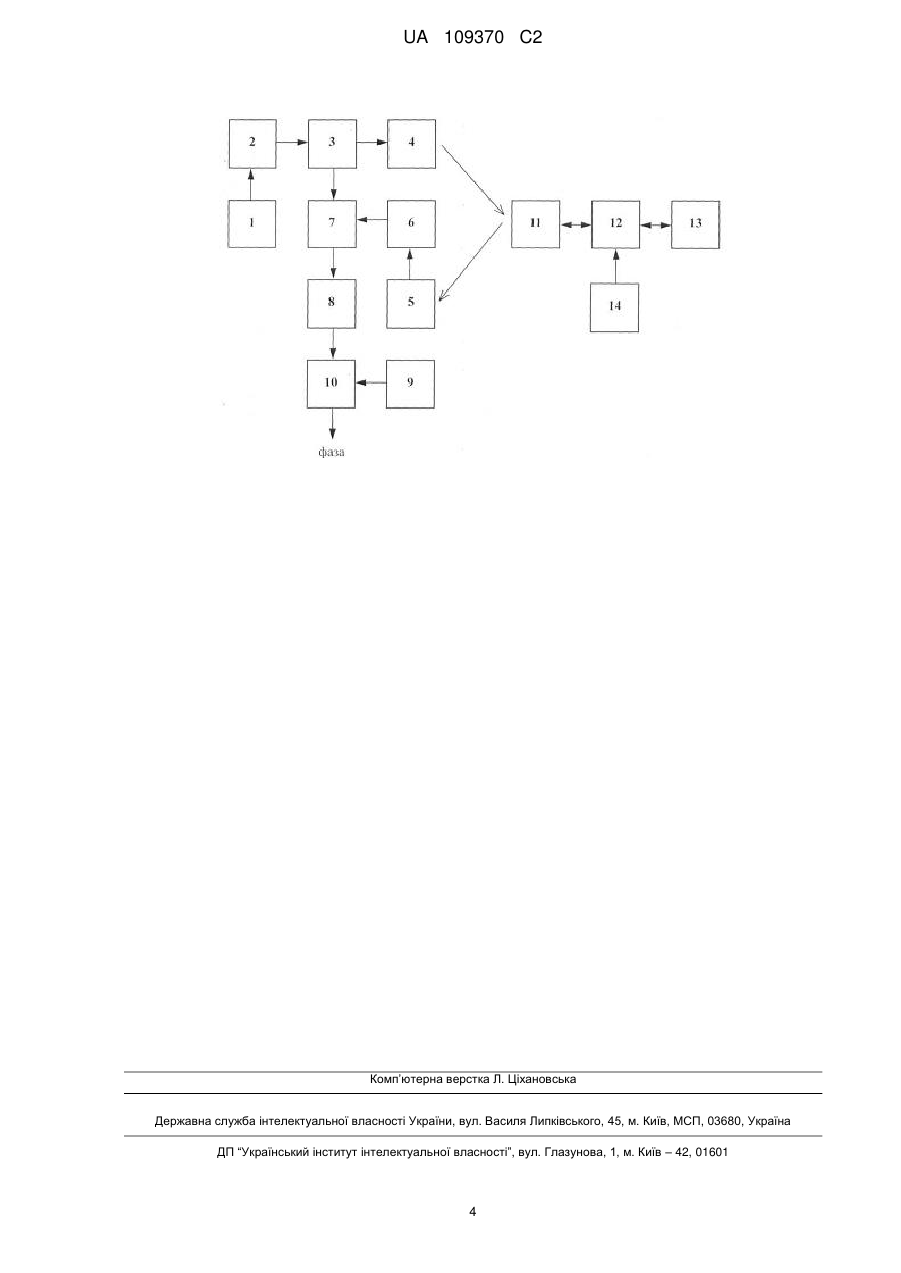
Реферат: Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування включає генерування безперервних високочастотних коливань з відомими частотами, первинне випромінювання, первинний прийом, зсув частоти, підсилення сигналу в транспондері, вторинне випромінювання, вторинний прийом високочастотних коливань, перемножування в змішувачі повторно прийнятих високочастотних коливань, що спочатку генеруються, вибіркове підсилення однієї з комбінаційних низькочастотних складових різниці коливань, послідовне вимірювання фазового зсуву між виділеним низькочастотним сигналом і сигналом низької частоти місцевого опорного генератора, обчислення відстані по послідовно виміряних різницях фаз. Первинно сформований високочастотний сигнал заздалегідь підсилюють за потужністю і безпосередньо через антену кругової поляризації відомого напряму обертання площини поляризації первинно випромінюють у напрямі антени лінійної поляризації транспондера. Просторове рознесення антен вимірювальної станції дозволяє підвищити розв'язку між каналами прийому і передачі, що дозволяє випромінювати сигнали підвищеної потужності і додатково підсилювати сигнали, які приймаються. UA 109370 C2 (12) UA 109370 C2 UA 109370 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області техніки радіотехнічних засобів вимірювання відстані і може бути використаний, наприклад, при відстежуванні руху і радіочастотній ідентифікації рухомих об'єктів. Відомі амплітудні способи визначення координат об'єктів (див., наприклад, кн. Довідник по основах техніки радіолокації / під ред. В. В. Дружиніна. - М.: Воєніздат, 1967.) Проте, амплітудні способи позиціонування мають велику похибку. Найбільш близькими, за технічною суттю, до передбачуваного винаходу є: "Спосіб вимірювання відстані від вимірювальної станції до ретранслятора", описаний у патенті України № 93645 від 25.02.2011, і "Спосіб збільшення дальності дії системи багатоабонентної радіочастотної ідентифікації", описаний у патенті України № 100897 від 100897. За цими способами ідентифікації і вимірювання відстані від вимірювальної станції до ретранслятора (транспондера) передбачається генерування безперервних високочастотних коливань з відомими частотами, первинне випромінювання, первинний прийом, зсув частоти, підсилення сигналу в транспондері, вторинне випромінювання, вторинний прийом високочастотних коливань, причому, первинне випромінювання і вторинний прийом здійснюються через один циркулятор і одну антену вимірювальної станції, перемножування в змішувачі повторно прийнятих високочастотних коливань, що спочатку генеруються, виборче підсилення однієї з комбінаційних низькочастотних складових різниці коливань і послідовне вимірювання фазового зсуву між виділеним низькочастотним сигналом і сигналом низької частоти місцевого опорного генератора. При цьому селективне підсилення припускає ідентифікацію об'єкта, а вимірювання різниці фаз припускає вимірювання відстані до об'єкта (транспондера). Проте, вказані способи ідентифікації і вимірювання дальності мають недоліки, що полягають у малій дальності дії системи та низькій точності визначення відстані. Мала дальність дії обумовлена тим, що у вимірювальній станції системи використовується одна спільна антена для первинного випромінювання і вторинного прийому, при цьому передавані сигнали, та сигнали що приймаються, розділяються через циркулятор. Розв'язка циркулятора, як правило, не перевищує 20 дБ, що обумовлює відомі обмеження на рівень потужності первинно випромінюваного сигналу. Встановлювати підсилювач сигналів, що приймаються, у вимірювальній станції при цьому не є можливим. Відповідно, дальність дії системи буде низька. З іншого боку, за допомогою транспондера первинно приймають сигнал вимірювальної станції, підсилюють його, трансформують його по частоті і перевипромінюють трансформований сигнал назад в напрямі вимірювальної станції. Підсилення сигналу підвищує дальність дії системи. Але треба розуміти, що сам транспондер встановлюється на деякому об'єкті, наприклад автомобілі. Ефективна поперечна площа розсіювання об'єкта велика в порівнянні з приведеною апертурою антени транспондера. Таким чином, у вимірювальну станцію надходять два сигнали: підсилений і трансформований по частоті сигнал транспондера і сигнал, відбитий від поперечної площі розсіювання об'єкта. Другий сигнал з частотою коливань, що первинно генеруються, є сигналом, що заважає. Наявність цього сигналу призводить до появи помилок вимірювання відстані. Крім того, антена транспондера встановлюється на рухомому об'єкті. Відповідно, взаємне розташування антен вимірювальної станції і транспондера може змінюватися, що може призводити до ослаблення сигналу, який приймається від транспондера, що призводить до зменшення дальності дії системи. В основу винаходу поставлено задачу збільшення дальності дії і точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування. Поставлена задача вирішується тим, що спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування, який включає генерування безперервних високочастотних коливання з відомими частотами, первинне випромінювання, первинний прийом, зсув частоти, підсилення сигналу в транспондері, вторинне випромінювання, вторинний прийом високочастотних коливань, перемножування в змішувачі повторно прийнятих високочастотних коливань, що спочатку генеруються, вибіркове підсилення однієї з комбінаційних низькочастотних складових різниці коливань, послідовне вимірювання фазового зсуву між виділеним низькочастотним сигналом і сигналом низької частоти місцевого опорного генератора, обчислення відстані по послідовно виміряних різницях фаз, що відрізняється тим, що первинно сформований високочастотний сигнал заздалегідь підсилюють за потужністю і безпосередньо через антену кругової поляризації відомого напряму обертання площини поляризації первинно випромінюють у напрямі антени лінійної поляризації транспондера, при цьому первинно прийнятий антеною лінійної поляризації, підсилений і трансформований по частоті сигнал транспондера повторно випромінюють тією ж антеною лінійної поляризації, повторно приймають у вимірювальній станції іншої, просторово віддаленої від першої, антенної кругової поляризації, напрям обертання площини поляризації якої протилежний напряму 1 UA 109370 C2 5 10 15 20 25 30 35 40 45 50 55 60 обертання площини поляризації хвилі, відбитої від поперечної площі розсіювання об'єкта, на якому встановлений транспондер, при цьому повторно прийнятий сигнал транспондера додатково підсилюють. Порівняння передбачуваного винаходу зі вже відомими способами і прототипом показує, що спосіб, який заявляється, виявляє нові технічні властивості, що полягають в підвищенні дальності дії системи і підвищенні точності вимірювання відстані. Ці властивості винаходу є новими, оскільки, у способі-прототипі, через властиві йому недоліки, що полягають у випромінюванні сигналу вимірювальної станції і прийомі сигналу транспондера через одну антену, передбачаючи, при цьому, розділення цих сигналів за допомогою циркулятора, не можна отримати великої дальності дії системи і високої точності. За способом, що заявляється, первинно випромінюваний сигнал може мати підвищену потужність, оскільки розділення випромінюваних сигналів та сигналів, які приймаються у вимірювальній станції, здійснює не циркулятор, що має відносно низький рівень розв'язки, а просторово рознесені антени, розв'язка між якими може досягати 40 дБ і більше. Дальність дії системи при цьому буде збільшена. Додаткового збільшення дальності дії досягають додатковим підсиленням сигналу, що повторно приймається. При цьому дальність дії системи не змінюється при зміні взаємного розташування антен вимірювальної станції і транспондера при пересуванні об'єкта, на якому встановлений останній, оскільки антени вимірювальної станції мають кругову поляризацію випромінювання, а антена транспондера - лінійну. При цьому, сигнал кругової поляризації, відбитий від поперечної площі розсіювання об'єкта, на якому встановлений транспондер, антеною вторинного прийому заглушується, оскільки ця антена має протилежний напрям обертання площини поляризації. Точність визначення відстані при цьому буде підвищена. Вказаний спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування можна реалізувати за допомогою пристрою, показаного на кресленні. Пристрій підвищеної точності вимірювання відстані і підвищеної дальності дії системи радіочастотної ідентифікації і позиціонування складається з генератора безперервних високочастотних коливань 1, підсилювача потужності високочастотних сигналів 2, спрямованого відгалужувача 3, передавальної антени кругової поляризації 4, приймальної антени кругової поляризації 5, малошумливого підсилювача 6, змішувача 7, вузькосмугового підсилювачаобмежувача 8, першого високостабільного низькочастотного генератора 9, вимірника різниці фаз 10, антени лінійної поляризації транспондера 11, керованого фазообертача 12, однопортового підсилювача високочастотних коливань 13, другого високостабільного низькочастотного генератора 14. Вихід генератора високочастотних коливань 1 з'єднаний зі входом підсилювача потужності 2, вихід якого з'єднаний зі входом спрямованого відгалужувача 3, перший вихід якого з'єднаний з передавальною антеною кругової поляризації 4, а другий вихід якого з'єднаний з першим входом змішувача 7, причому, приймальна антена кругової поляризації 5 з'єднана зі входом малошумливого підсилювача 6, вихід якого з'єднаний з другим входом змішувача 7, причому вихід змішувача 7 з'єднаний зі входом вузькосмугового підсилювача-обмежувача 8, причому вихід вузькосмугового підсилювача-обмежувача 8 з'єднаний з першим входом вимірника різниці фаз 10, причому вихід першого високостабільного низькочастотного генератора 9 з'єднаний з другим входом вимірника різниці фаз 10, при цьому антена лінійної поляризації транспондера 11 з'єднана з першим сигнальним виводом керованого фазообертача 12, другий сигнальний вивід якого з'єднаний з виводом однопортового підсилювача високочастотних коливань 13, при цьому вхід управління керованого фазообертача 12 з'єднаний з виходом другого високостабільного низькочастотного генератора 14. Працює пристрій, що реалізує спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування, що заявляється, таким чином. Генератором високочастотних коливань 1 спочатку генерують безперервні високочастотні коливання з відомою частотою, початковою фазою і амплітудою. Всі аналітичні формули, що описують процеси формування, випромінювання, прийому і перетворення сигналів, обчислення відстані детально описані в патентах-прототипах № 93645 і № 100897, тому тут не приводяться. Підсилені за потужністю коливання через спрямований відгалужувач 3, з незначними втратами енергії, подають на антену кругової поляризації 4 і випромінюють у напрямі антени лінійної поляризації транспондера 11. Прийняті антенною лінійної поляризації транспондера 11 високочастотні коливання подають на першій сигнальній вивід керованого фазообертача 12 і з другого сигнального вивода якого далі на однопортовий підсилювач високочастотних коливань 2 UA 109370 C2 5 10 15 20 25 30 13. Далі підсилені високочастотні коливання знов подають на другій сигнальній вивід керованого фазообертача 12 і далі через першій сигнальний вивід фазообертача 12 на антену лінійної поляризації транспондера 11. У керованому фазообертачі в безперервні високочастотні коливання, під дією сигналу управління від низькочастотного високостабільного генератора 14, вводять монотонно наростаючий фазовий зсув, призводячи, по суті справи, до зсуву частоти початкових високочастотних коливань. Трансформовані, таким чином, по частоті коливання перевипромінюють через антену лінійної поляризації транспондера 11 у напрямі антени кругової поляризації 5 вимірювальної станції, де їх приймають і підсилюють малошумливим підсилювачем 6. Підсилені високочастотні коливання змішують з частиною енергії початкових високочастотних коливань у змішувачі 7 і за допомогою вузькосмугового підсилювача-обмежувача 8 виділяють і підсилюють до обмеження комбінаційну складову різниці початкових високочастотних коливань і трансформованих в транспондері по частоті. Після цього у вимірнику різниці фаз 10 вимірюють різницю фаз безперервних низькочастотних коливань, що формуються високостабільними генераторами вимірювальної станції 9 транспондера 14 з урахуванням набігу фази високочастотних коливань при їх поширенні від вимірювальної станції і назад. По послідовно змінній в часі частоті високочастотного генератора і вимірюваній різниці фаз низькочастотних генераторів, визначають відстань між вимірювальною станцією і транспондером з високою точністю. Дальність дії системи при цьому буде підвищена. Народногосподарський ефект від використання передбачуваного винаходу пов'язаний із збільшенням дальності дії системи радіочастотної ідентифікації і позиціонування. Збільшення дальності дії обумовлене можливістю первинно випромінювати високочастотні сигнали підвищеної потужності і додатково підсилювати сигнали, що повторно приймаються. Крім того, підвищення ефективності від використання передбачуваного винаходу пов'язане з підвищенням точності визначення відстані між вимірювальною станцією і транспондером, встановлюваному на об'єкті ідентифікації і стеження. Цей ефект обумовлений заглушенням сигналу, відбитого поперечною площею розсіювання об'єкта, на якому встановлений транспондер. Інший аспект підвищення ефективності від передбачуваного винаходу пов'язаний з тим, що взаємне положення антен вимірювальної станції і транспондера може вільно змінюватися в просторі в межах зміни площини поляризації антен. Рівень сигналу, що повторно приймається, змінюватися при цьому не буде, оскільки, первинно випромінюють і повторно приймають вимірювальною станцією хвилі кругової поляризації, тоді як первинно приймають і повторно випромінюють транспондером хвилі лінійної поляризації. 35 ФОРМУЛА ВИНАХОДУ 40 45 50 55 Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування, який включає генерування безперервних високочастотних коливань з відомими частотами, первинне випромінювання, первинний прийом, зсув частоти, підсилення сигналу в транспондері, вторинне випромінювання, вторинний прийом високочастотних коливань, перемножування в змішувачі повторно прийнятих високочастотних коливань, що спочатку генеруються, вибіркове підсилення однієї з комбінаційних низькочастотних складових різниці коливань, послідовне вимірювання фазового зсуву між виділеним низькочастотним сигналом і сигналом низької частоти місцевого опорного генератора, обчислення відстані по послідовно виміряних різницях фаз, який відрізняється тим, що первинно сформований високочастотний сигнал заздалегідь підсилюють за потужністю і безпосередньо через антену кругової поляризації відомого напряму обертання площини поляризації первинно випромінюють у напрямі антени лінійної поляризації транспондера, при цьому первинно прийнятий антеною лінійної поляризації, підсилений і трансформований по частоті сигнал транспондера повторно випромінюють тією ж антеною лінійної поляризації, повторно приймають у вимірювальній станції іншої, просторово віддаленої від першої, антенної кругової поляризації, напрям обертання площини поляризації якої протилежний напряму обертання площини поляризації хвилі, відбитої від поперечної площі розсіювання об'єкта, на якому встановлений транспондер, при цьому повторно прийнятий сигнал транспондера додатково підсилюють. 3 UA 109370 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюShyrokov Ihor Borysovych
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: G01S 13/00, G01S 13/32, G01R 29/08
Мітки: збільшення, дальності, радіочастотної, системі, позиціонування, відстані, дії, вимірювання, точності, спосіб, ідентифікації
Код посилання
<a href="https://ua.patents.su/6-109370-sposib-zbilshennya-dalnosti-di-i-zbilshennya-tochnosti-vimiryuvannya-vidstani-sistemi-radiochastotno-identifikaci-i-pozicionuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб збільшення дальності дії і збільшення точності вимірювання відстані системи радіочастотної ідентифікації і позиціонування</a>
Спосіб збільшення дальності дії системи багатоабонентної радіочастотної ідентифікації
Номер патенту: 100897
Опубліковано: 11.02.2013
Автор: Широков Ігор Борисович
МПК: G01R 29/08, G01S 13/00
Мітки: дії, дальності, радіочастотної, ідентифікації, системі, збільшення, спосіб, багатоабонентної
Формула / Реферат:
Спосіб збільшення дальності дії системи багатоабонентної радіочастотної ідентифікації, що включає первинне генерування безперервних радіочастотних коливань з частотою f, первинне випромінювання їх у напрямі декількох транспондерів, що одночасно знаходяться в зоні дії системи радіочастотної ідентифікації, первинний прийом цих безперервних радіочастотних коливань, вторинне випромінювання і вторинний прийом трансформованих по частоті і...
Спосіб багатоабонентної радіочастотної ідентифікації
Номер патенту: 91937
Опубліковано: 10.09.2010
Автор: Широков Ігор Борисович
МПК: H04L 25/00, H03M 1/00
Мітки: багатоабонентної, спосіб, ідентифікації, радіочастотної
Формула / Реферат:
Спосіб багатоабонентної радіочастотної ідентифікації, що включає первинне генерування безперервних високочастотних коливань з частотою f, первинне випромінювання і первинний прийом цих безперервних високочастотних коливань, модуляцію по амплітуді прийнятих високочастотних коливань унікальною кодовою послідовністю, вторинне випромінювання і вторинний прийом трансформованих високочастотних коливань, який відрізняється тим, що високочастотні...
Спосіб вимірювання дальності
Номер патенту: 94529
Опубліковано: 10.05.2011
Автор: Широков Ігор Борисович
МПК: G01S 13/32
Мітки: дальності, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання дальності, що включає первинне випромінювання, первинний прийом, вторинне випромінювання, вторинний прийом високочастотних коливань, який відрізняється тим, що спочатку генерують два безперервні високочастотні коливання з відомими частотами і , та через суматор, через один циркулятор і...
Спосіб вимірювання відстані від вимірювальної станції до ретранслятора
Номер патенту: 93645
Опубліковано: 25.02.2011
Автор: Широков Ігор Борисович
МПК: G01S 13/32
Мітки: вимірювання, вимірювальної, ретранслятора, спосіб, відстані, станції
Формула / Реферат:
Спосіб вимірювання відстані від вимірювальної станції до ретранслятора, що включає первинне випромінювання, первинний прийом, підсилення високочастотних коливань, зсув частоти високочастотних коливань, вторинне випромінювання, вторинний прийом високочастотних коливань, який відрізняється тим, що спочатку у вимірювальній станції і в ретрансляторі двома генераторами одночасно генерують безперервні низькочастотні високостабільні коливання з...
Спосіб вимірювання дальності
Номер патенту: 104437
Опубліковано: 10.02.2014
Автори: Каминін Іван Володимирович, Широков Ігор Борисович
МПК: G01S 13/32
Мітки: вимірювання, спосіб, дальності
Формула / Реферат:
Спосіб вимірювання дальності, що включає генерування безперервних низькочастотних коливань, генерування безперервних високочастотних коливань, зсув частоти цих безперервних високочастотних коливань за допомогою керованого фазообертача, зсув вихідних і трансформованих по частоті безперервних високочастотних коливань, виділення комбінаційної складової різниці, управління частотою безперервних високочастотних коливань по заданому алгоритму,...
Попередній патент: Спосіб промислового виготовлення цукерок на основі маси нуги
Наступний патент: Спосіб м’язової аутопластики кукси стопи у хворих з деструктивною формою синдрому діабетичної стопи
Випадковий патент: Консерви "огірки мариновані з гірчицею"