Мембранний рівнемір
Номер патенту: 111041
Опубліковано: 25.10.2016
Автори: Рубан Наталія Павлівна, Дубовець Олексій Миколайович
Формула / Реферат
Мембранний рівнемір, що містить корпус, дві мембрани, встановлені в стінці корпусу на різній висоті, датчики тиску, систему перетворення сигналів датчиків тиску в сигнал, пропорційний рівню рідини в об'єкті, і засіб вимірювання, який відрізняється тим, що корпус рівнеміра виконаний у вигляді паралелепіпеда з забезпеченням герметичності, на боковій стінці корпусу закріплений за допомогою затискного пристрою інсталяційний стержень, довжина якого може змінюватися в межах (0,05-0,10) ![]() , де
, де ![]() - граничне значення вимірюваного рівня в технологічному об'єкті, дві мембрани, що розташовані на відстані (0,10-0,15)
- граничне значення вимірюваного рівня в технологічному об'єкті, дві мембрани, що розташовані на відстані (0,10-0,15) ![]() одна від одної, на верхній кришці корпусу закріплений вивідний патрубок, довжина якого визначається за формулою
одна від одної, на верхній кришці корпусу закріплений вивідний патрубок, довжина якого визначається за формулою ![]() , де
, де ![]() - довжина вивідного патрубка,
- довжина вивідного патрубка, ![]() - перевищення вивідного патрубка над поверхнею рідини в об'єкті, вихідні сигнали датчиків тиску, що сприймають прогин мембран, з'єднані з входами мікропроцесорного пристрою, вихід якого з'єднаний з входом вимірювального приладу зі шкалою, проградуйованою в одиницях вимірювання рівня, при цьому мікропроцесор вибраний з функціями: безперервне вимірювання тисків
- перевищення вивідного патрубка над поверхнею рідини в об'єкті, вихідні сигнали датчиків тиску, що сприймають прогин мембран, з'єднані з входами мікропроцесорного пристрою, вихід якого з'єднаний з входом вимірювального приладу зі шкалою, проградуйованою в одиницях вимірювання рівня, при цьому мікропроцесор вибраний з функціями: безперервне вимірювання тисків ![]() і
і ![]() на мембрани, де
на мембрани, де ![]() - тиск на мембрану, занурену в рідину на глибину
- тиск на мембрану, занурену в рідину на глибину ![]() , відносно граничного значення вимірюваного рівня в технологічному об'єкті, а
, відносно граничного значення вимірюваного рівня в технологічному об'єкті, а ![]() - тиск на мембрану, занурену в рідину на глибину
- тиск на мембрану, занурену в рідину на глибину ![]() відповідно; вимірювання співвідношення
відповідно; вимірювання співвідношення ![]() , визначення рівня рідини в ємності за формулою
, визначення рівня рідини в ємності за формулою ![]() , де
, де ![]() - поточне значення рівня рідини в технологічному об'єкті,
- поточне значення рівня рідини в технологічному об'єкті, ![]() - відстань від центру нижньої мембрани до кінця установочного стержня, а
- відстань від центру нижньої мембрани до кінця установочного стержня, а ![]() ,
, ![]() .
.
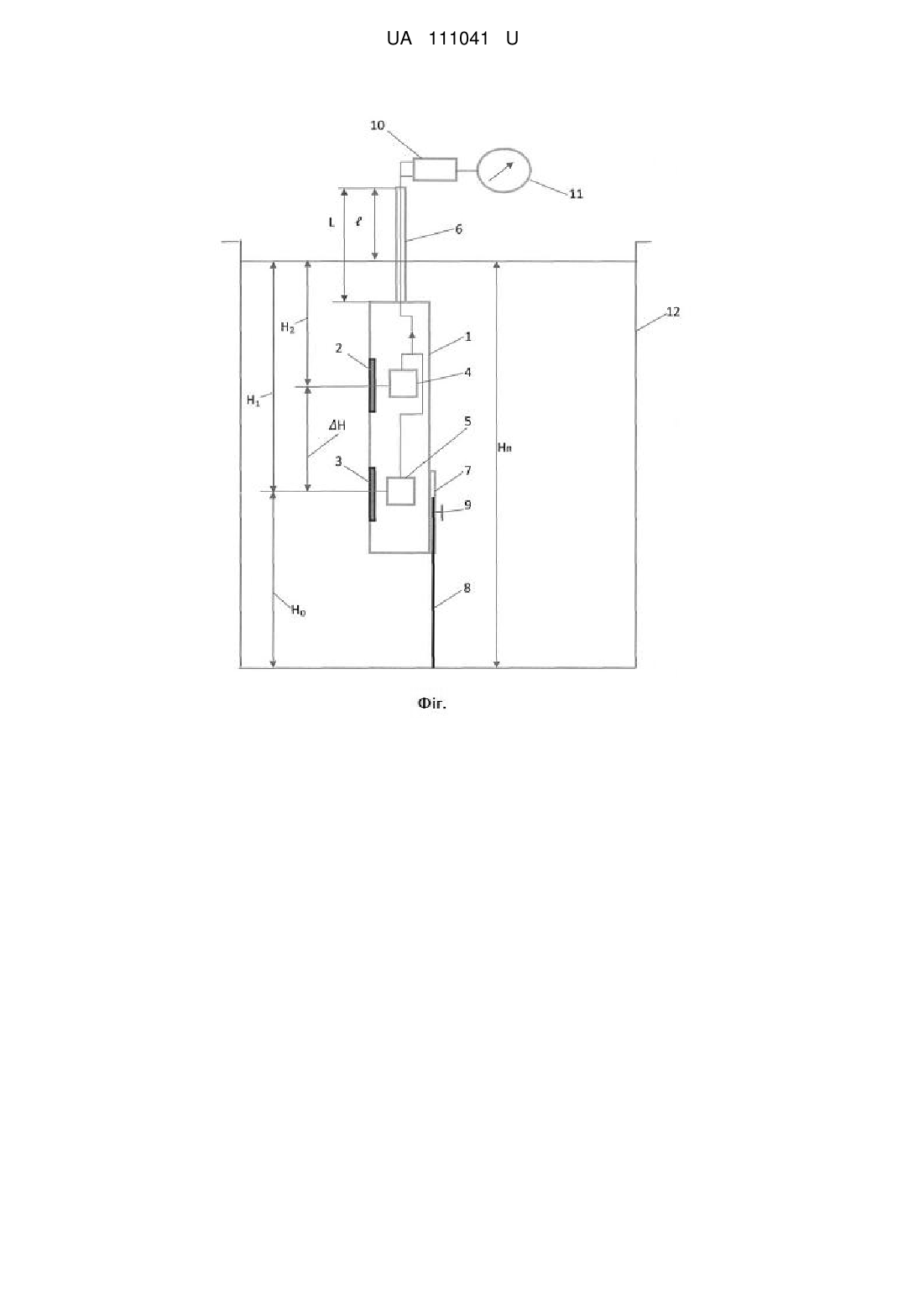
Текст
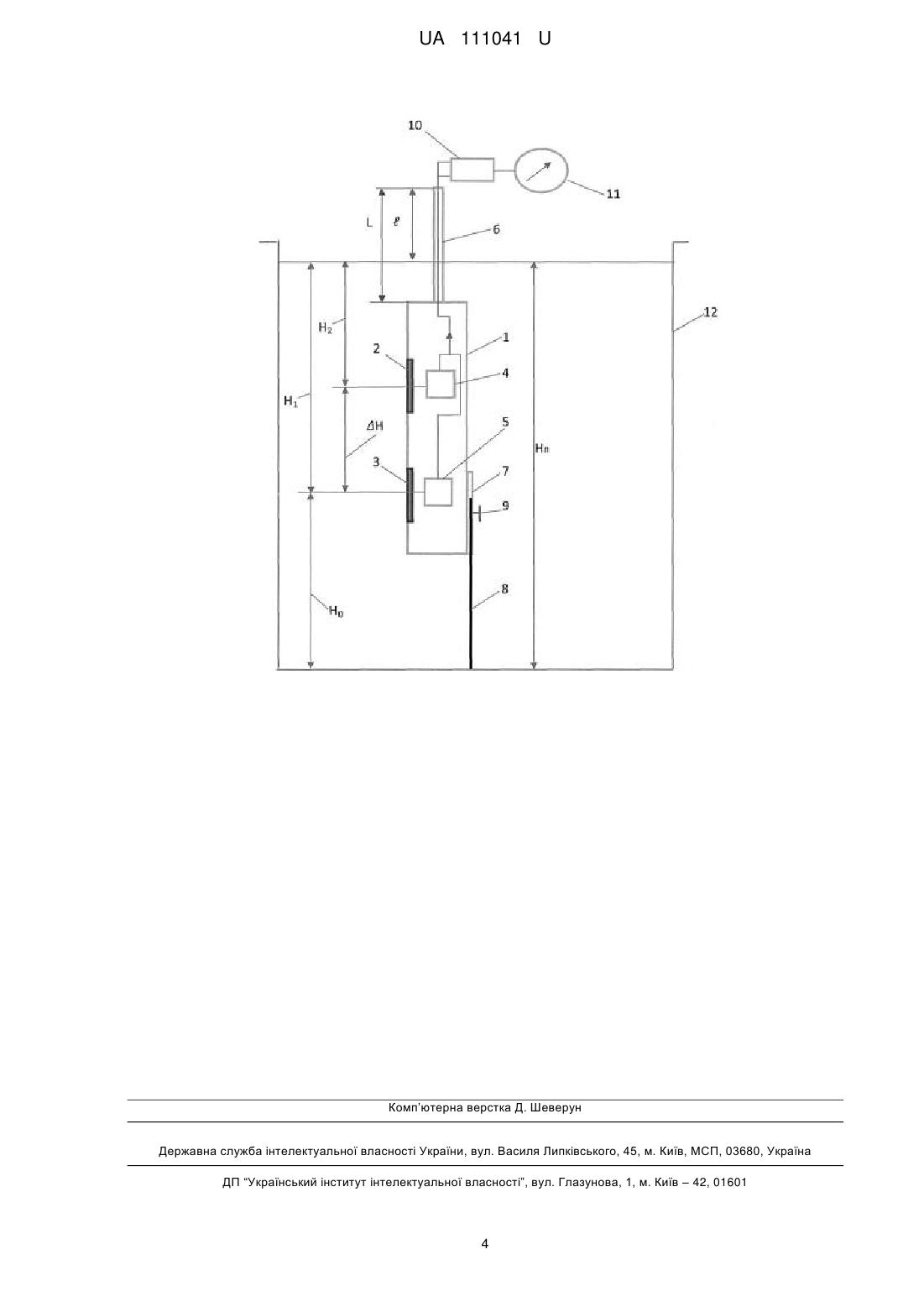
Реферат: UA 111041 U UA 111041 U 5 10 15 20 25 30 Мембранний рівнемір належить до вимірювальної техніки і може бути використаний в різних галузях промисловості, в об'єктах яких необхідно вимірювати рівень рідких середовищ, що мають гарну плинність, з постійними і змінними (щільність, в'язкість) властивостями. Відомий рівнемір для рідини, що містить камеру з двома різновеликими мембранами, вмонтованими в стінку камери, встановленими на П-подібному рівноплечовому важелі, закріпленому на поворотній осі, диференційно-трансформаторний датчик, плунжер якого за допомогою штока жорстко з'єднаний з поворотною (як випливає з креслення) віссю, підсилювач, реверсивний двигун, редуктор з шестірнею, рейку, шкалу з покажчиком і датчик вихідного сигналу [1]. Перевагами прототипу є відсутність необхідності врізання мембран в стінки ємності з контрольованим середовищем, простота конструкції і виключення залежності результатів вимірювання рівня від зміни щільності контрольованої рідини в будь-яких межах. Недоліками прототипу є: недостатня чутливість рівнеміра до зміни рівня внаслідок того, що мембрани мають різну ефективну площу (менша мембрана має меншу чутливістю до зміни тиску стовпа рідини); неефективний вибір зони установки плунжера диференційно-трансформаторного датчика (плунжер переміщається тільки за рахунок повороту осі), що істотно зменшує чутливість рівнеміра до зміни рівня контрольованої рідини; відсутність можливості зменшення порогу чутливості рівнеміра і вибору його оптимальної чутливості, внаслідок жорсткої прив'язки плунжера до осі, на якій закріплений П-подібний важіль. Найбільш близьким по технічній суті та результату, що досягається, до пропонованого мембранного рівнеміру (прототипом) є рівнемір для рідини, що містить камеру з двома мембранами, вмонтованими в стінку камери, встановленими на П-подібному рівноплечовому важелі, закріпленому на поворотній осі, диференційно-трансформаторний датчик, плунжер якого за допомогою штока жорстко з'єднаний з коромислом, систему, що стежить електропривод і вимірювальний прилад, при цьому його мембрани мають однакову ефективну площу, плечі П-подібного коромисла мають різну довжину 1 і 2 (1 2 ) , на кінці більшого плеча П-подібного коромисла жорстко встановлена у вертикальному положенні консоль, плунжер диференційно-трансформаторного датчика і його котушка встановлені відповідно на консолі і в середині жолобоподібної направляючої з прямими бортами з можливістю переміщення і закріплення в заданому положенні, а довжини плечей коромисла відповідно 1 і 2 і консолі к в напрямку знизу вгору пов'язані співвідношенням 1: (1,5-2,0): (1-2) [2]. 35 40 45 50 55 Перевагами цього пристрою є: 1) використання в конструкції рівнеміра рівновеликих мембран, що забезпечує умови для рівноцінності їх реакції на вимір рівня рідини в технологічному об'єкті; 2) зменшується поріг чутливості, що забезпечується установленням плунжера на консолі, закріпленій на кінці більшого плеча П-подібного коромисла; 3) забезпечується можливість вибору оптимального порогу чутливості за рахунок можливості переміщення і закріплення плунжера і котушки диференціального датчика в вертикальному напрямку. Недоліками цього рішення прототипу є: 1) необхідність переміщення камери при зміні рівня рідини, що обмежує область його використання в межах рівня до 2-х метрів; 2) при збільшенні межі вимірювання істотно зростає металоємність і маса камери і, отже, потужність приводного механізму і енергоємність; 3) наявність інерційності вимірювальної системи, що негативно позначається при різких і частих змінах рівня (що пов'язано з необхідністю переміщення камери у вертикальному напрямку). Задачею корисної моделі є вилучення відомих недоліків прототипу (складність конструкції, обмеженість діапазону вимірювання і інерційність) при збереженні всіх його переваг. Поставлена задача вирішується за рахунок того, що у прототипі, що містить камеру з двома мембранами, вмонтованими в стінку камери, встановленими на П-подібному рівноплечовому важелі, закріпленому на поворотній осі, диференційно-трансформаторний датчик, плунжер якого за допомогою штока жорстко з'єднаний з коромислом, систему, що стежить електропривод і вимірювальний прилад, при цьому плечі П-подібного коромисла мають різну довжину 1 і 2 (1 2 ) , на кінці більшого плеча П-подібного коромисла жорстко встановлена в вертикальному положенні консоль, плунжер диференційно-трансформаторного датчика і його котушка встановлені відповідно на консолі і в середині жолобоподібної направляючої з прямими 1 UA 111041 U 5 10 15 бортами з можливістю переміщення і закріплення в заданому положенні, а довжини плечей коромисла відповідно 1 і 2 і консолі к в напрямку знизу вгору пов'язані співвідношенням 1: (1,5-2,0), внаслідок чого виникають причини інерційності вимірювальної системи, обмеженості діапазону вимірювання і значної металоємності і енергоємності, згідно з корисною моделлю, корпус рівнеміра виконаний у вигляді паралелепіпеда з забезпеченням герметичності, на боковій стінці корпусу закріплений за допомогою затискного пристрою інсталяційний стержень, довжина якого може змінюватися в межах (0,05-0,10) Hп , де Hп - граничне значення вимірюваного рівня в технологічному об'єкті, дві мембрани, що розташовані на відстані (0,100,15) Hп один від одного, на верхній кришці корпусу закріплений вивідний патрубок, довжина якого визначається за формулою L Hп , де L - довжина вивідного патрубка, перевищення вивідного патрубка над поверхнею рідини в об'єкті, вихідні сигнали датчиків тиску, що сприймають прогин мембран, з'єднані з входами мікропроцесорного пристрою, вихід якого з'єднаний з входом вимірювального приладу зі шкалою, проградуйованою в одиницях вимірювання рівня, при цьому мікропроцесор вибраний з функціями: безперервне вимірювання тисків P1 і P2 на мембрани, де P1 тиск на мембрану, занурену в рідину на глибину H1 , відносно граничного значення вимірюваного рівня в технологічному об'єкті, а P2 - тиск на мембрану, занурену в рідину на глибину H2 відповідно, вимірювання співвідношення P1 / P2 , визначення рівня рідини в ємності за формулою H H0 P1H / P , де H - поточне значення рівня рідини в технологічному об'єкті, H0 - відстань від центру нижньої мембрани до кінця установочного 20 25 стержня, H H1 H2 const (H1 H2 ) , P P1 P2 . Схему мембранного рівнеміра наведено на кресленні, де 1 - герметичний корпус рівнеміра, 2 і 3 - мембрани з жорстким центром, 4 і 5 - датчики, 6 - вивідний патрубок, 7 - направляючий патрубок, 8 - інсталяційний стержень, 9 - затискний пристрій, 10 - мікропроцесорний блок, 11 вторинний прилад, 12 - ємність. Мембранний рівнемір містить герметичний корпус 1, в стінку якого вмонтовані на різній висоті H1 і H2 , відносно граничного значення вимірюваного рівня в технологічному об'єкті Hп , мембрани з жорстким центром 2 і 3, датчики 4 і 5, перший з яких сприймає тиск P1 на мембрану 2, другий - тиск P2 на мембрану 3, інсталяційний стержень 8, закріплений на стінці герметичного 40 корпусу 1 за допомогою затискного пристрою 9 з висотою, необхідною для фіксації відстані H0 від центру нижньої мембрани 5 до дна ємності 12, яка може змінюватися в межах (0,05-0,10) Hп , вивідний патрубок 6, жорстко і герметично закріплений на верхній кришці герметичного корпусу 1, що призначений для виведення ліній зв'язку, що з'єднують виходи датчиків з мікропроцесорним блоком 10 і вторинний прилад 11 зі шкалою, проградуйованою в одиницях виміру рівня. Робота мембранного рівнеміра здійснюється наступним чином. Залежно від діапазону вимірювання рівня рідини в технологічному об'єкті 12 вибирається довжина установочного стрижня 8 (конструкція якого включає зміну його довжини) і визначається з мінімальною похибкою відстані H0 від дна ємності 12 до центру мембрани 3. При зміні рівня Н рідини в об'єкті 12 на мембрани 2 і 3 починають діяти відповідно сили P H1S1g і P2 H2S2g , 1 45 де H1 - глибина, на яку занурено мембрану 2 в рідину, відносно граничного значення вимірюваного рівня в технологічному об'єкті, м; H2 - глибина, на яку занурено мембрану 3 в рідину, відносно граничного значення вимірюваного рівня в технологічному об'єкті, м; 2 S1 - площа мембрани 2, м ; 30 35 2 S 2 - площа мембрани 3, м ; 3 - густина рідини, кг/м ; 2 g - прискорення вільного падіння, м/с . В зв'язку з тим, що площі мембран S1 і S2 рівні, то справедлива рівність: 50 P1 H1 P1 H1 ; P2 H2 P1 P H1 H де P P1 P2 ; H H1 H2 const (H1 H2 ) . 2 UA 111041 U Таким чином, H1 P1 H ; (1) P P1 H H0 , (2) P де H0 - відстань від центру нижньої мембрани до дна ємності, м. H Із (2) очевидно, що при H const, поточне значення рівня рідини в об'єкті залежить тільки 5 10 15 від співвідношення P1 , бо значення H і H0 - постійні величини. P Вихідні сигнали датчиків 4 і 5 надходять на вхід мікропроцесорного блока, в якому обробляються відповідно до формули 2. Вихідний сигнал мікропроцесора далі надходить на вхід вторинного приладу 11 зі шкалою, проградуйованою в одиницях виміру рівня. У порівнянні з прототипом пропонований сигналізатор рівня має наступні переваги: простота, стаціонарність конструкції, незначнаметалоємність; широкий діапазон виміру; мінімальна інерційність. Джерела інформації: 1. А. с. СРСР № 257792, М.Кл. G01F 23/00. Опубл. 20.11.1969. 2. Патент України на корисну модель № 91430, M.Кл.G01F 23/00. Опубл. 10.07.2014. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Мембранний рівнемір, що містить корпус, дві мембрани, встановлені в стінці корпусу на різній висоті, датчики тиску, систему перетворення сигналів датчиків тиску в сигнал, пропорційний рівню рідини в об'єкті, і засіб вимірювання, який відрізняється тим, що корпус рівнеміра виконаний у вигляді паралелепіпеда з забезпеченням герметичності, на боковій стінці корпусу закріплений за допомогою затискного пристрою інсталяційний стержень, довжина якого може змінюватися в межах (0,05-0,10) Hп , де Hп - граничне значення вимірюваного рівня в технологічному об'єкті, дві мембрани, що розташовані на відстані (0,10-0,15) Hп одна від одної, на верхній кришці корпусу закріплений вивідний патрубок, довжина якого визначається за формулою L Hп , де L - довжина вивідного патрубка, - перевищення вивідного патрубка над поверхнею рідини в об'єкті, вихідні сигнали датчиків тиску, що сприймають прогин мембран, з'єднані з входами мікропроцесорного пристрою, вихід якого з'єднаний з входом вимірювального приладу зі шкалою, проградуйованою в одиницях вимірювання рівня, при цьому мікропроцесор вибраний з функціями: безперервне вимірювання тисків P1 і P2 на мембрани, де P1 - тиск на мембрану, занурену в рідину на глибину H1 , відносно граничного значення вимірюваного рівня в технологічному об'єкті, а P2 - тиск на мембрану, занурену в 35 рідину на глибину H2 відповідно; вимірювання співвідношення P1 / P2 , визначення рівня рідини в ємності за формулою H H0 P1H / P , де H - поточне значення рівня рідини в технологічному об'єкті, H0 - відстань від центру нижньої мембрани до кінця установочного стержня, а H H1 H2 const (H1 H2 ) , P P P2 . 1 3 UA 111041 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01F 23/16
Мітки: мембранний, рівнемір
Код посилання
<a href="https://ua.patents.su/6-111041-membrannijj-rivnemir.html" target="_blank" rel="follow" title="База патентів України">Мембранний рівнемір</a>
Рівнемір для рідини
Номер патенту: 91430
Опубліковано: 10.07.2014
Автори: Дубовець Олексій Миколайович, Подустов Михайло Олексійович, Власова Тетяна Володимирівна, Литвиненко Ігор Іванович
МПК: G01F 23/00
Формула / Реферат:
Рівнемір для рідини, що містить камеру з двома мембранами, вмонтованими в стінки камери на різній висоті і з'єднаними між собою за допомогою П-подібного коромисла, що обертається на осі, диференційно-трансформаторний датчик, плунжер якого жорстко з'єднаний з коромислом, слідкуючу систему - електропривод і вимірювальний прилад, який відрізняється тим, що мембрани мають однакову ефективну площу, плечі П-подібного коромисла мають різну довжину...
Рівнемір для рідини

Номер патенту: 25364
Опубліковано: 10.08.2007
Автори: Григорова Олена Миколаївна, Чернишенко Ніні Олександрівна, Дубовець Олексій Миколайович
МПК: G01F 23/14
Формула / Реферат:
1. Рівнемір для рідини, що містить датчик, слідкувальний електропривід, вторинний прилад, причому датчик виконаний у вигляді камери з двома різновеликими мембранами, що спираються на рівновеликі плечі П-подібного поворотного коромисла, жорстко з'єднаного з плунжером перетворювача, включеного на вхід слідкувального електроприводу, який відрізняється тим, що датчик виконаний у вигляді камери з двома рівновеликими мембранами, що спираються на...
Поплавковий рівнемір
Номер патенту: 74374
Опубліковано: 15.12.2005
Автори: Березуцький Михайло Миколаєвич, Дульский Микола Васильович
МПК: G01F 23/30
Мітки: поплавковий, рівнемір
Формула / Реферат:
Поплавковий рівнемір, який складається з металевої гнучкої мірної стрічки з поділками, один кінець якої прикріплений на валу, а другий - до тягаря й поплавкової камери, який відрізняється тим, що на гнучкій мірній стрічці встановлений з можливістю переміщення вздовж неї фіксатор рівня рідини, виконаний у вигляді постійного магніту.
Рівнемір
Номер патенту: 18005
Опубліковано: 17.06.1997
Автори: Погребняк Олександр Олександрович, Щурик Володимир Олександрович, Войтович Леонід Володимирович, Наконечний Володимир Васильович, Серілко Леонід Степанович
МПК: G01F 23/30
Мітки: рівнемір
Формула / Реферат:
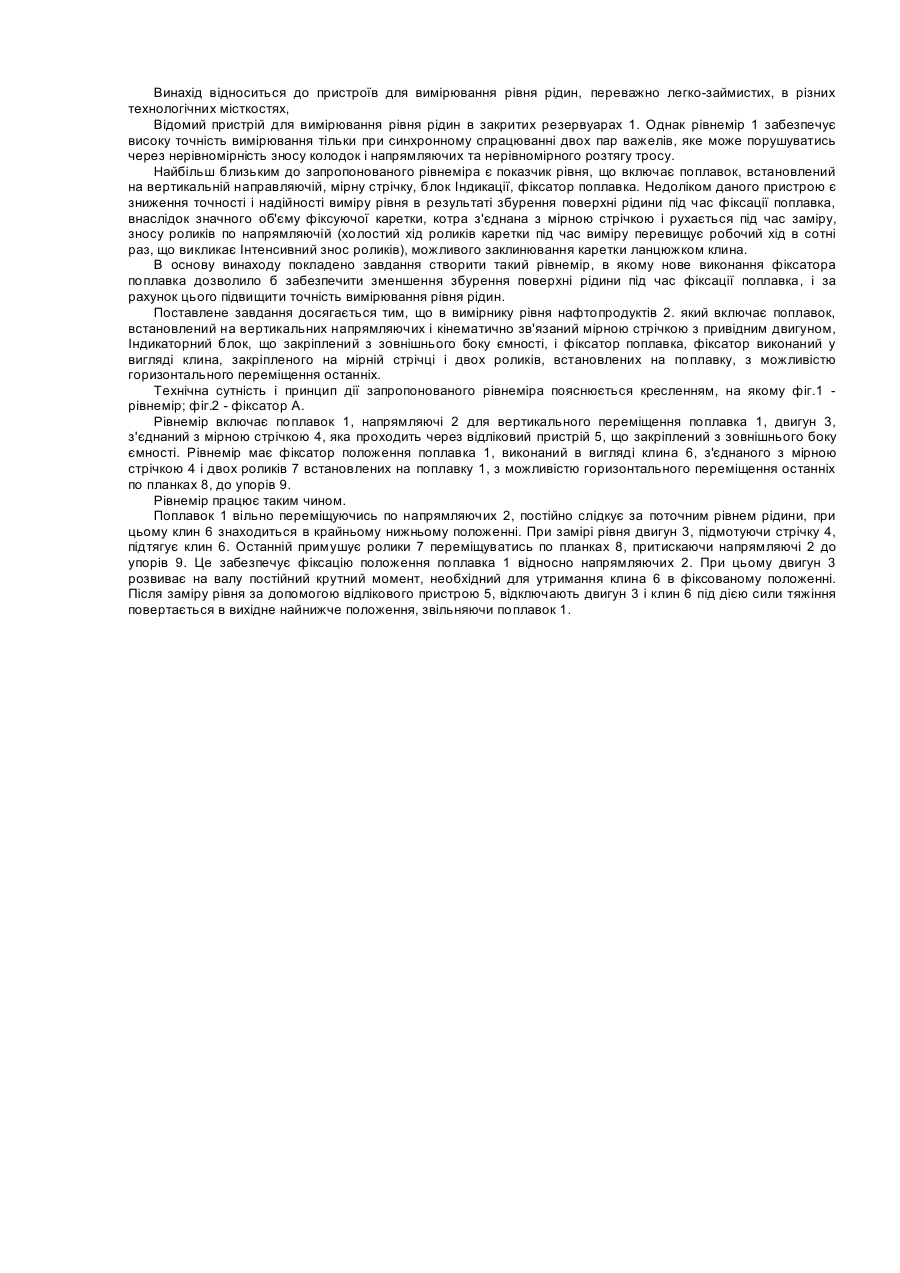
Рівнемір, що включає поплавок, встановлений на вертикальних напрямляючих і кінематично зв'язаний мірною стрічкою з барабаном, механічно з'єднаним з привідним двигуном, індикаторний блок, що закріплений з зовнішнього боку ємності і фіксатор поплавка, який відрізняється тим, що фіксатор виконаний у вигляді клина, закріпленого на мірній стрічці і двох роликів, встановлених на поплавку, з можливістю горизонтального переміщення останніх.
Дискретний рівнемір
Номер патенту: 13857
Опубліковано: 25.04.1997
Автори: Миргородський Михайло Мефодієвич, Політучий Олександр Іванович
МПК: G01F 23/24
Мітки: дискретний, рівнемір
Формула / Реферат:
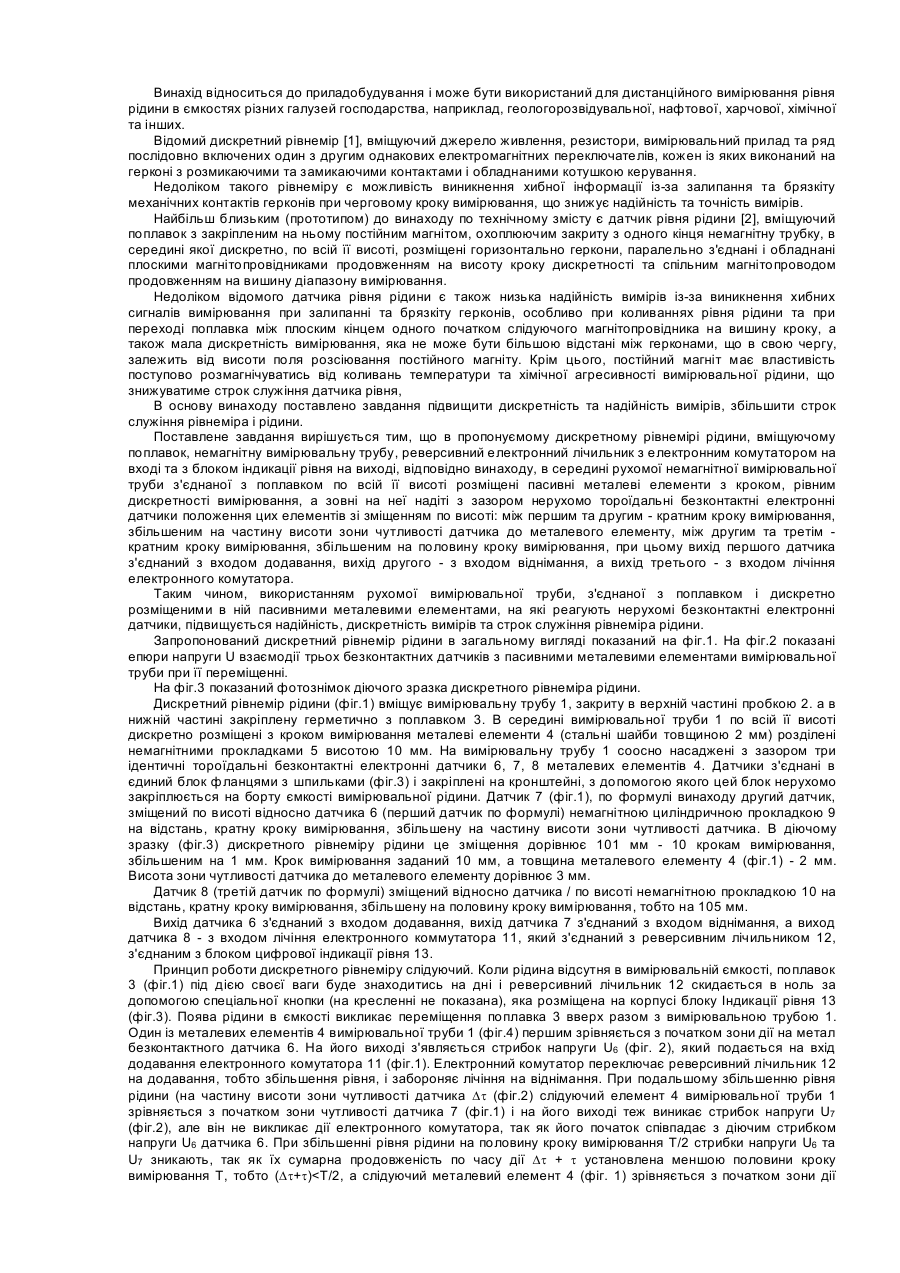
Дискретний рівнемір рідини, вміщуючий поплавок. немагнітну вимірювальну трубу, реверсивний електронний лічильник з електронним комутатором на вході та блоком індикації рівня на виході, який відрізняється тим, що в середині рухомої немагнітності вимірювальної труби, з'єднаної з поплавком, по всій її висоті разміщені пасивні металеві елементи з кроком, рівним дискретності вимірювання, а зовні на неї надіті з зазором нерухомо тороїдальні...
Попередній патент: Гідравлічний пристрій для зменшення динамічних навантажень вантажопідйомного механізму
Наступний патент: Дискове гальмо нормально замкненого типу
Випадковий патент: Спосіб виконання попередньо відформованих заготівок волокнистої структури для виготовлення деталей кільцевої форми із композиційного матеріалу