Спосіб визначення координат джерел акустичної емісії контрольованого об’єкта

Формула / Реферат
Спосіб визначення координат джерел акустичної емісії контрольованого об'єкта, що включає прийом сигналів акустичної емісії (АЕ) групою каналів, вимірювання амплітуди сигналів у кожному каналі й визначення різниці часів надходження сигналів на приймальні перетворювачі каналів, по яким визначають координати джерел, який відрізняється тим, що попередньо на контрольований об'єкт, на рівній відстані від двох приймальних перетворювачів, встановлюють імітатор сигналів АЕ, виконаний у вигляді зразка матеріалу тотожного матеріалу контрольованого об'єкта з наперед визначеним дефектом, наприклад з наведеною тріщиною, забезпечений випромінюючим перетворювачем, випромінюють акустичні імпульси, змінюють амплітуду сигналу в одному з каналів і визначають залежність помилки виміру різниці часу надходження сигналів АЕ до перетворювачів від амплітуди, в процесі контролю об'єкта вимірювані різниці часів надходження сигналів АЕ коригують відповідно до їхньої амплітуди й отриманої залежності, а зі скоригованих різниць часів надходження віднімають найменшу з них.
Текст
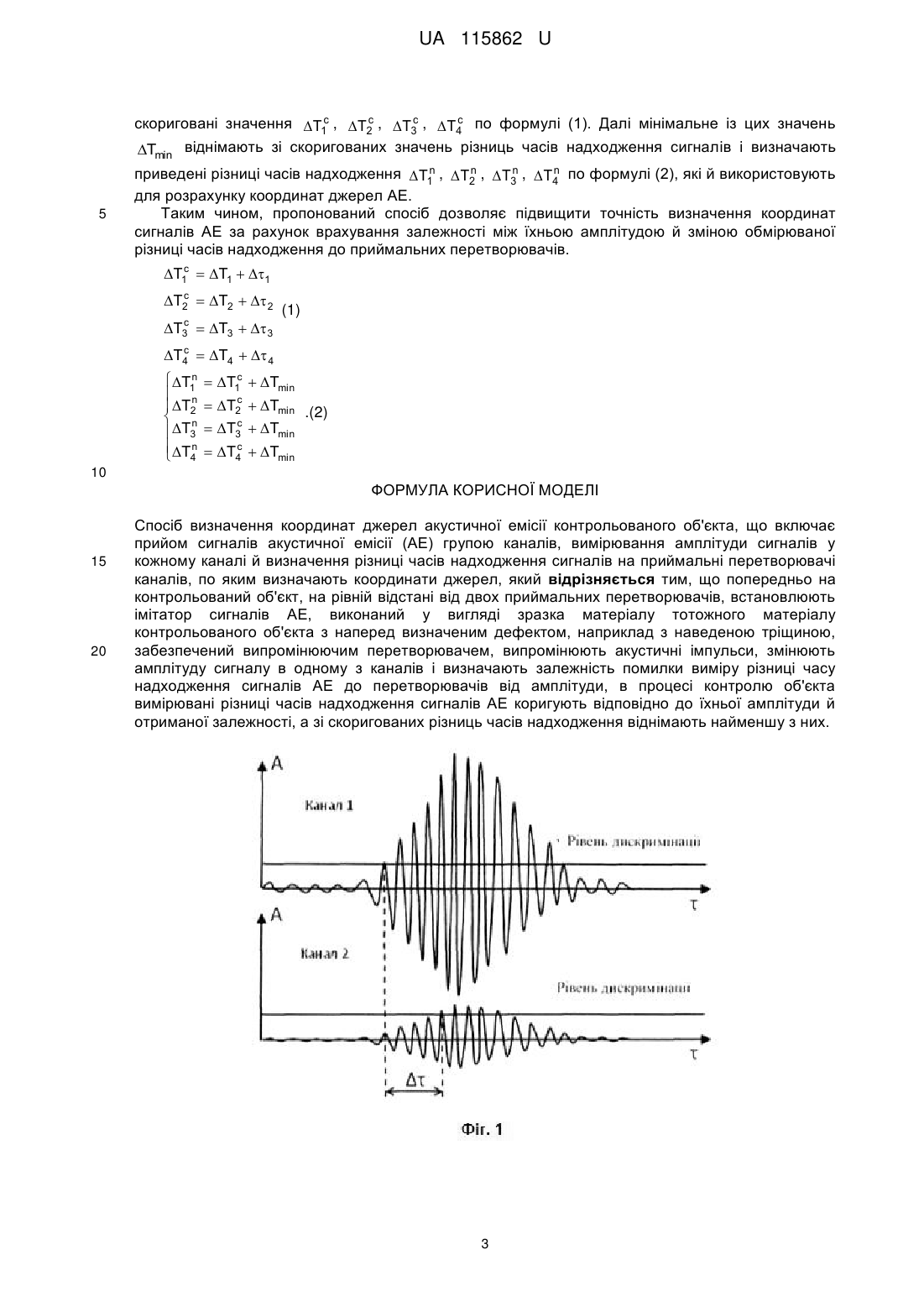
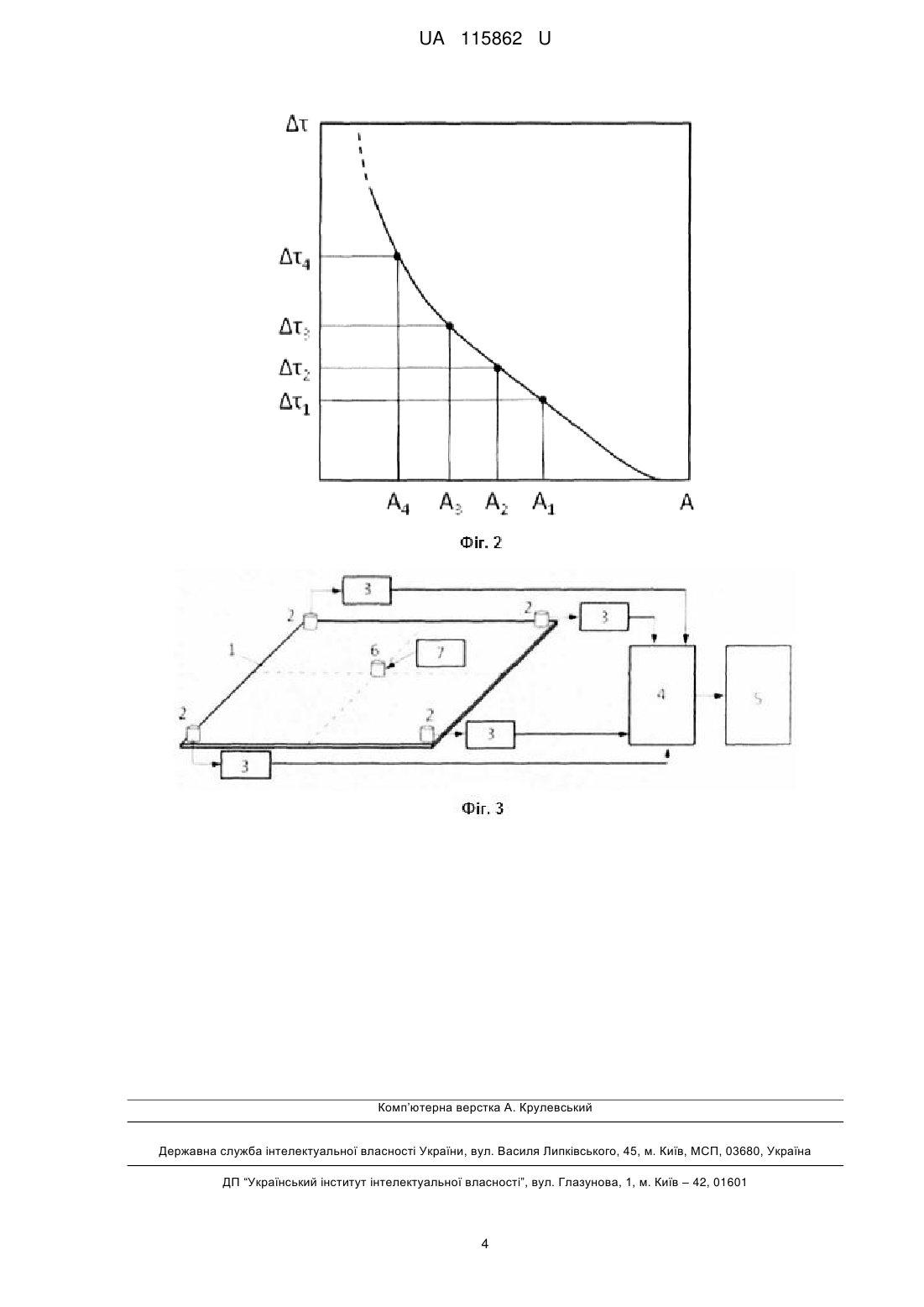
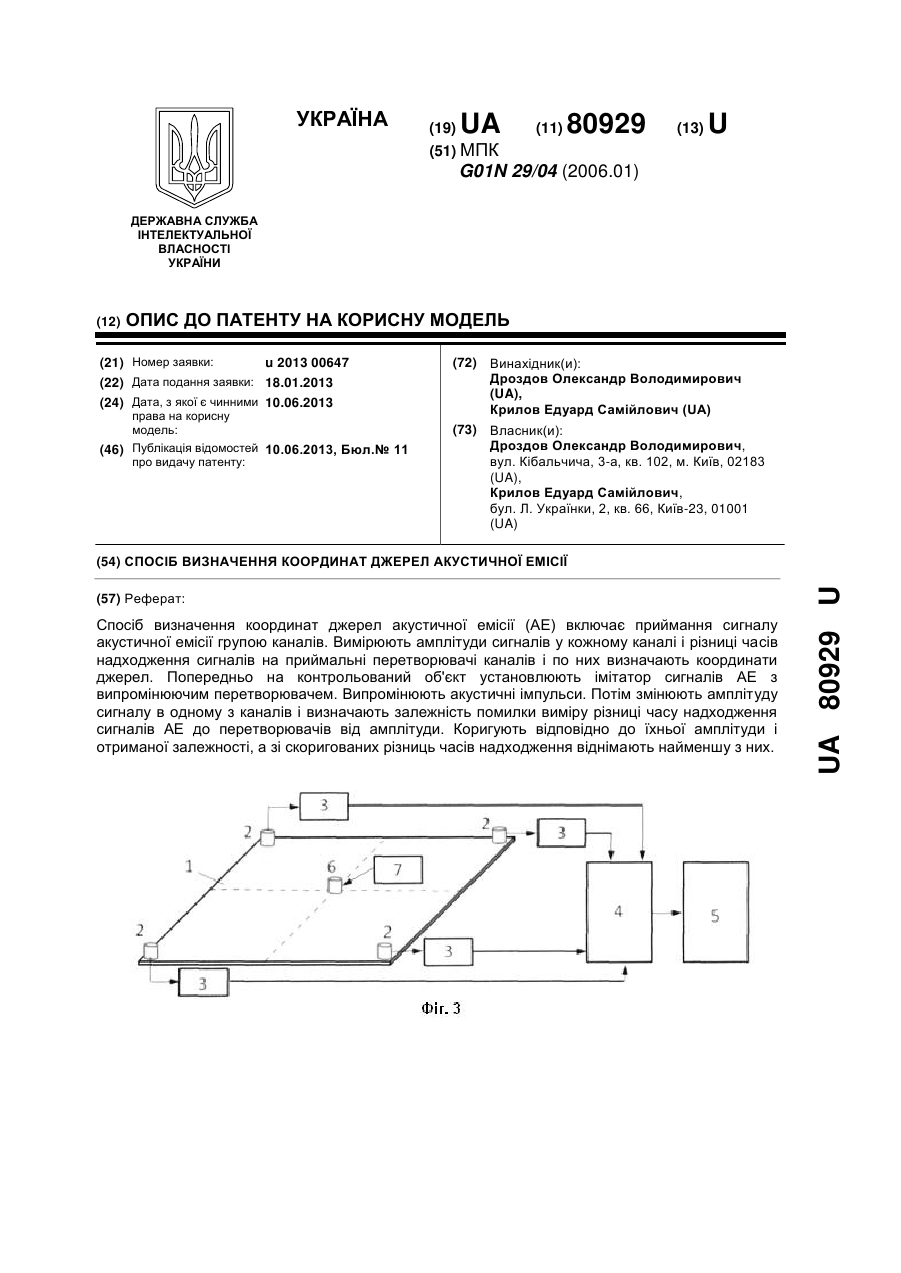
Реферат: Спосіб визначення координат джерел акустичної емісії контрольованого об'єкта включає прийом сигналів акустичної емісії (АЕ) групою каналів, вимірювання амплітуди сигналів у кожному каналі й визначення різниці часів надходження сигналів на приймальні перетворювачі каналів, по яким визначають координати джерел. Попередньо на контрольований об'єкт, на рівній відстані від двох приймальних перетворювачів, встановлюють імітатор сигналів АЕ, виконаний у вигляді зразка матеріалу тотожного матеріалу контрольованого об'єкта з наперед визначеним дефектом, наприклад з наведеною тріщиною, забезпечений випромінюючим перетворювачем, випромінюють акустичні імпульси, змінюють амплітуду сигналу в одному з каналів і визначають залежність помилки виміру різниці часу надходження сигналів АЕ до перетворювачів від амплітуди, в процесі контролю об'єкта вимірювані різниці часів надходження сигналів АЕ коригують відповідно до їхньої амплітуди й отриманої залежності, а зі скоригованих різниць часів надходження віднімають найменшу з них. UA 115862 U (12) UA 115862 U UA 115862 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до методів неруйнівного контролю об'єктів акустико-емісійним методом і може бути використана в машинобудівній, паливній, металообробній та в інших галузях народного господарства. Найбільш близьким до пропонованого за кількістю суттєвих ознак є спосіб визначення координат джерел акустичної емісії контрольованого об'єкта, під час якого приймають сигнали акустичної емісії (АЕ) групою каналів, вимірюють амплітуди сигналів у кожному каналі й різниці часів надходження сигналів на приймальні перетворювачі каналів і по них визначають координати джерел [А.с. № 1392496 СРСР, МПК 4 G01N 29/04, Опубліковано: 30.04.1988, Бюл. № 16, 1988 р.]. Згаданий спосіб є недостатньо точним, оскільки в кожному каналі протягом заданого інтервалу часу визначають середні для кожного з каналів величини параметрів (число імпульсів, сумарну максимальну амплітуду або сумарну тривалість імпульсів), аналізують їх і після цього змінюють коефіцієнти підсилення по каналах і в такий спосіб вирівнюють параметри апаратури для наступних сигналів АЕ; при цьому величина їх, наприклад амплітуда, заздалегідь невідома. В цьому випадку, при реєстрації сигналів АЕ, які мають невелику амплітуду, для виключення можливих пропусків, установлюють досить велике підсилення по каналах, а рівень дискримінації вибирають таким чином, щоб він був трохи вище рівня власного шуму апаратури. В результаті з'являється необхідність регулювання коефіцієнтів підсилення по каналах, що фактично приводить до зниження підсилення в порівнянні з максимально можливим і, як наслідок, до втрати чутливості апаратури й пропуску окремих сигналів АЕ. Таким чином, вищеописані недоліки не дозволяють істотно підвищити точність визначення координат джерел акустичної емісії. Реальні сигнали АЕ, які реєструються у вимірювальних каналах, завдяки резонансним властивостям приймальних перетворювачів і акустичним параметрам контрольованого об'єкта, являють собою високочастотні коливання з наростаючою й загасаючою ділянками. Внаслідок цього процес загасання акустичних хвиль при їхньому поширенні в матеріалі об'єкта, а, відповідно, і амплітуди імпульсів АЕ прийнятих приймальними перетворювачами залежать від відстані між перетворювачем і джерелом АЕ. Час надходження імпульсу до кожного з перетворювачів визначається в момент перевищення сигналом АЕ фіксованого рівня дискримінації (порога). У результаті цього зі зменшенням амплітуди імпульсів АЕ момент перевищення граничного рівня наступає пізніше, що викликає помилки при визначенні різниці часів надходження імпульсів АЕ до приймальних перетворювачів і це, відповідно, приводить до низької точності визначення координат джерел АЕ. В основу пропонованої корисної моделі поставлена задача створення такого способу визначення координат джерел АЕ, який би дозволив підвищити його точність шляхом використання імітатора імпульсів АЕ у вигляді зразка матеріалу тотожного матеріалу контрольованого об'єкта з наперед визначеним дефектом, забезпеченого випромінюючим перетворювачем. Поставлена задача вирішується тим, що у пропонованому способі, що, як і відомий спосіб визначення координат джерел акустичної емісії контрольованого об'єкта, включає прийом сигналів акустичної емісії (АЕ) групою каналів, вимірювання амплітуди сигналів у кожному каналі й визначення різниці часів надходження сигналів на приймальні перетворювачі каналів, по яким визначають координати джерел, відповідно до пропонованої корисної моделі, попередньо на контрольований об'єкт, на рівній відстані від двох приймальних перетворювачів, встановлюють імітатор сигналів АЕ, виконаний у вигляді зразка матеріалу тотожного матеріалу контрольованого об'єкта з наперед визначеним дефектом, наприклад з наведеною тріщиною для відтворення певних акустичних властивостей контрольованого об'єкта, а імітатор сигналів АЕ забезпечений випромінюючим перетворювачем. При цьому випромінюють акустичні імпульси, змінюють амплітуду сигналу в одному з каналів і визначають залежність помилки виміру різниці часу надходження сигналів АЕ до перетворювачів від амплітуди, в процесі контролю об'єкта обмірювані різниці часів надходження сигналів АЕ коригують відповідно до їхньої амплітуди й отриманої залежності, а зі скоригованих різниць часів надходження віднімають найменшу з них. Суть пропонованої корисної моделі пояснюється за допомогою графічних матеріалів: Фіг. 1 - Схема формування помилки визначення різниці часу надходження сигналів АЕ ( ) по двох каналах через їх нерівні амплітуди (А). Фіг. 2 - Залежність похибки виміру різниці часу надходження сигналів АЕ ( ) від амплітуди (А). Фіг. 3 - Блок-схема комплексу для визначення координат джерел АЕ. На блок-схемі (Фіг. 3) позицією 1 позначений контрольований об'єкт 1, на якому встановлена група приймальних 1 UA 115862 U 5 10 15 20 25 30 35 40 45 50 55 перетворювачів 2 (не менш трьох). Позицією 3 позначені попередні підсилювачі, позицією 4 блок обробки, позицією 5 - персональний комп'ютер, забезпечений відповідним програмним статком. В центрі контрольованого об'єкта 1 розташований випромінюючий перетворювач 6 з імітатором імпульсів АЕ 7 - зразком матеріалу тотожного матеріалу контрольованого об'єкта з наперед визначеним дефектом - наведеною тріщиною, призначеним для можливості для відтворення певних акустичних властивостей контрольованого об'єкта. У випадку, якщо відстані від випромінюючого перетворювача 6 до приймальних перетворювачів 2 рівні, різниця часів надходження до них імпульсів дорівнює нулю (Фіг. 1). У випадку, якщо зменшилися амплітуди сигналів АЕ (наприклад внаслідок погіршення акустичного контакту між перетворювачем і об'єктом), то визначена різниця часів надходження сигналу, при фіксованому рівні дискримінації, вже не буде дорівнювати нулю, а збільшиться на величину ( ) , тобто приведе до помилки визначення координати. При контролі об'єкта 1, якщо джерело АЕ розташоване близько до приймального перетворювача 2, то амплітуда сигналу в цьому каналі буде порівняно великою і помилка фіксації моменту надходження імпульсу АЕ буде незначною. При більш віддаленому розташуванні джерела АЕ, амплітуда сигналу буде істотно нижчою й, відповідно, помилка фіксації моменту надходження імпульсу АЕ значно зросте. Тому, для підвищення точності визначення координат джерел АЕ, необхідно одержати залежність помилки визначення різниці часу надходження сигналів до одного з приймальних перетворювачів ( ) від амплітуди сигналів АЕ (А), що дозволяє при контролі об'єкта по визначених амплітудах сигналів АЕ вводити поправку в різниці часів надходження імпульсів АЕ до приймальних перетворювачів. Змінюючи коефіцієнт підсилення одного з каналів, і виконуючи при цьому виміри як амплітуди сигналів АЕ в цьому каналі, так і різниці часів надходження, одержують функціональну залежність зміни різниці часів надходження ( ) , (у цьому випадку помилки фіксації різниці часів надходження), від амплітуди А сигналів АЕ (Фіг. 2). При цьому зазначена залежність помилки виміру різниці часу надходження сигналів зберігається для подальшого розрахунку. З наведеної залежності видно, що помилка виміру зменшується і зникає зі збільшенням амплітуди сигналу АЕ. Важливо, що при використанні імітатора імпульсів АЕ з випромінюючим перетворювачем каналами пристрою приймаються реальні імпульси АЕ, форма й параметри яких визначаються характеристиками використовуваних приймальних перетворювачів 2 і акустичних властивостей контрольованого об'єкта 1. Таким чином, запропонований спосіб дозволяє підвищити точність визначення координат сигналів АЕ за рахунок обліку залежності між їхньою амплітудою й зміною обмірюваної різниці часів надходження до приймальних перетворювачів. Технічним результатом, що досягається при використанні запропонованого способу визначення координат джерел акустичної емісії, є підвищення точності визначення в об'єкті місця розташування дефектів, які розвиваються в процесі його навантаження. Приклад. На контрольований об'єкт 1 установлюється група приймальних перетворювачів 2 (не менш трьох), а в центрі контрольованого об'єкта 1 розташовують випромінюючий перетворювач 6 з імітатором імпульсів АЕ 7 (Фіг. 3). Сигнали від приймальних перетворювачів 2 підсилюються попередніми підсилювачами 3 і далі надходять на блок обробки 4, де піддаються фільтрації й подальшому підсиленню. Блок обробки 4 вимірює амплітуду сигналів акустичної емісії й формує імпульси по кожному з каналів при перевищенні встановленого рівня дискримінації (порога). Значення амплітуд сигналів АЕ й сформовані імпульси по всіх каналах подаються на персональний комп'ютер 5 для виміру різниці часів надходження для кожної пари приймальних перетворювачів (каналів) і наступного розрахунку координат джерел АЕ. Спосіб визначення координат джерел акустичної емісії здійснюється в такий спосіб. Попередньо до проведення контролю об'єкта 1, на ньому, на рівному видаленні від двох приймальних перетворювачів, установлюють імітатор 7 імпульсів АЕ - зразок з наведеною тріщиною - з випромінюючим перетворювачем 6, за допомогою якого домагаються досить великої амплітуди генерованих імпульсів, потім змінюють коефіцієнт підсилення в одному з каналів і вимірюють у цьому каналі амплітуду сигналів АЕ й різницю часів надходження їх до двох приймальних перетворювачів імпульсів АЕ. В результаті одержують залежність помилки виміру різниці часу надходження імпульсів АЕ від їхньої амплітуди. При контролі об'єкта приймальними перетворювачами 2 приймаються сигнали АЕ, виміряються в кожному каналі їхньої амплітуди А1, А2, A3, А4 і різниці часів надходження сигналів на приймальні перетворювачі каналів T1 , T2 , T3 , T4 . По визначеним у чотирьох каналах амплітудам А1, А2, A3, А4, з врахуванням отриманої раніше залежності, визначають помилки виміру різниці часів надходження сигналів 1 , 2 , 3 , 4 (Фіг. 2) і вносять відповідні поправки в визначені різниці часів надходження сигналів T1 , T2 , T3 , T4 , в результаті чого одержують 2 UA 115862 U с с с с скориговані значення T1 , T2 , T3 , T4 по формулі (1). Далі мінімальне із цих значень Tmin віднімають зі скоригованих значень різниць часів надходження сигналів і визначають 5 n n n n приведені різниці часів надходження T1 , T2 , T3 , T4 по формулі (2), які й використовують для розрахунку координат джерел АЕ. Таким чином, пропонований спосіб дозволяє підвищити точність визначення координат сигналів АЕ за рахунок врахування залежності між їхньою амплітудою й зміною обмірюваної різниці часів надходження до приймальних перетворювачів. с T1 T1 1 с T2 T2 2 с T3 T3 3 (1) с T4 T4 4 n T1 n T2 n T3 T n 4 с T1 Tmin с T2 Tmin .(2) с T3 Tmin с T4 Tmin 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Спосіб визначення координат джерел акустичної емісії контрольованого об'єкта, що включає прийом сигналів акустичної емісії (АЕ) групою каналів, вимірювання амплітуди сигналів у кожному каналі й визначення різниці часів надходження сигналів на приймальні перетворювачі каналів, по яким визначають координати джерел, який відрізняється тим, що попередньо на контрольований об'єкт, на рівній відстані від двох приймальних перетворювачів, встановлюють імітатор сигналів АЕ, виконаний у вигляді зразка матеріалу тотожного матеріалу контрольованого об'єкта з наперед визначеним дефектом, наприклад з наведеною тріщиною, забезпечений випромінюючим перетворювачем, випромінюють акустичні імпульси, змінюють амплітуду сигналу в одному з каналів і визначають залежність помилки виміру різниці часу надходження сигналів АЕ до перетворювачів від амплітуди, в процесі контролю об'єкта вимірювані різниці часів надходження сигналів АЕ коригують відповідно до їхньої амплітуди й отриманої залежності, а зі скоригованих різниць часів надходження віднімають найменшу з них. 3 UA 115862 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 29/04, G01N 3/00
Мітки: акустичної, об'єкта, контрольованого, визначення, координат, емісії, джерел, спосіб
Код посилання
<a href="https://ua.patents.su/6-115862-sposib-viznachennya-koordinat-dzherel-akustichno-emisi-kontrolovanogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат джерел акустичної емісії контрольованого об’єкта</a>
Спосіб визначення координат джерел акустичної емісії
Номер патенту: 80929
Опубліковано: 10.06.2013
Автори: Дроздов Олександр Володимирович, Крилов Едуард Самійлович
МПК: G01N 29/04
Мітки: емісії, акустичної, джерел, координат, визначення, спосіб
Формула / Реферат:
1. Спосіб визначення координат джерел акустичної емісії (АЕ), який полягає в тому, що приймають сигнали акустичної емісії групою каналів, вимірюють амплітуди сигналів у кожному каналі й різниці часів надходження сигналів на приймальні перетворювачі каналів і по них визначають координати джерел, який відрізняється тим, що для підвищення точності визначення координат джерел АЕ, попередньо на контрольований об'єкт, на рівній відстані від двох...
Спосіб визначення координат джерел акустичної емісії
Номер патенту: 92168
Опубліковано: 11.08.2014
Автори: Дроздов Олександр Володимирович, Крилов Едуард Самійлович
МПК: G01N 29/04
Мітки: емісії, акустичної, спосіб, координат, джерел, визначення
Формула / Реферат:
Спосіб визначення координат джерел акустичної емісії, який полягає в тім, що групою каналів з приймальними перетворювачами приймають сигнали акустичної емісії, для окремої події АЕ по кожному каналу вимірюють різницю часу приходу сигналів, об'єкт розділяють скінченими елементами, для кожного вузла об'єкта по відомих координатах приймальних перетворювачів та відомій швидкості розповсюдження ультразвукових коливань розраховують відповідні...
Спосіб визначення координат дефектів методом акустичної емісії
Номер патенту: 51981
Опубліковано: 16.12.2002
Автори: Горошко Андрій Володимирович, Ковтун Ігор Іванович, Ройзман Вілен Петрович
МПК: G01N 29/04
Мітки: дефектів, спосіб, акустичної, визначення, методом, координат, емісії
Формула / Реферат:
Спосіб визначення координат дефектів методом акустичної емісії (АЕ), який полягає у реєстрації хвиль акустичного діапазону, генерованих досліджуваним об'єктом під впливом зовнішньої енергетичної дії, за допомогою cкорельованих акустичних давачів та визначенні різниці часу надходження переднього фронту хвилі, утвореного у місці розташування дефектоутворювальної неоднорідності у матеріалі об'єкту, обчисленні координат джерела реєстрованого...
Спосіб визначення координат дефектів методом акустичної емісії
Номер патенту: 43125
Опубліковано: 15.11.2001
Автори: Ковтун Ігор Іванович, Ройзман Вілен Петрович, Прохоренко Сергій Вікторович, Горошко Андрій Володимирович
МПК: G01N 29/14
Мітки: визначення, емісії, спосіб, координат, дефектів, методом, акустичної
Формула / Реферат:
Спосіб визначення координат дефектів методом акустичної емісії (АЕ), що полягає у реєстрації хвиль акустичного діапазону, генерованих досліджуваним об'єктом під впливом зовнішньої енергетичної дії, за допомогою групи скорельованих акустичних давачів та визначенні різниці часу приходу переднього фронту хвилі, утвореного у місці розташування дефектоутворюючої неоднорідності у матеріалі об'єкта, обчисленні координат джерела реєстрованого...
Пристрій для визначення координат джерела акустичної емісії
Номер патенту: 41138
Опубліковано: 15.08.2001
Автори: Ковтун Ігор Іванович, Прохоренко Сергій Вікторович, Ройзман Вілен Петрович, Горошко Андрій Володимирович
МПК: G01N 29/04
Мітки: пристрій, акустичної, координат, джерела, визначення, емісії
Формула / Реферат:
Пристрій для визначення координат джерела акустичної емісії триангуляційним акусто-емісійним (АЕ) методом, що містить чотири приймально - підсилювальних канали, кожен із яких складається з послідовно з'єднаних п'єзопсрстворювача (АЕ - датчика), попереднього підсилювача та підсилювача фільтрів, виходи якого з'єднано з входами формувача осциляцій і подій, формувача пікових значень амплітуди і блоком лінійних координат, які, в свою чергу,...
Попередній патент: Однорозрядний напівсуматор
Наступний патент: Спосіб прогнозування ефективності ендовезикального лікування міхурово-сечовідного рефлюксу у дітей
Випадковий патент: Пристрій для виготовлення опалубки для міжповерхових перекриттів та підлог