Спосіб визначення координат джерел акустичної емісії
Номер патенту: 92168
Опубліковано: 11.08.2014
Автори: Дроздов Олександр Володимирович, Крилов Едуард Самійлович
Формула / Реферат
Спосіб визначення координат джерел акустичної емісії, який полягає в тім, що групою каналів з приймальними перетворювачами приймають сигнали акустичної емісії, для окремої події АЕ по кожному каналу вимірюють різницю часу приходу сигналів, об'єкт розділяють скінченими елементами, для кожного вузла об'єкта по відомих координатах приймальних перетворювачів та відомій швидкості розповсюдження ультразвукових коливань розраховують відповідні різниці часу приходу сигналів АЕ до кожного приймального перетворювача, по виміряних та розрахованих різницях часу приходу сигналів АЕ визначають координати джерела АЕ, який відрізняється тим, що вимірюють амплітуду сигналів АЕ і за координати джерела АЕ приймають координати того вузла об'єкта, для якого сума квадратів різниць між виміряними і розрахунковими значеннями по кожному каналу, помножена на квадрати відповідних значень амплітуди АЕ зареєстрованої для даного каналу, є найменшою.
Текст
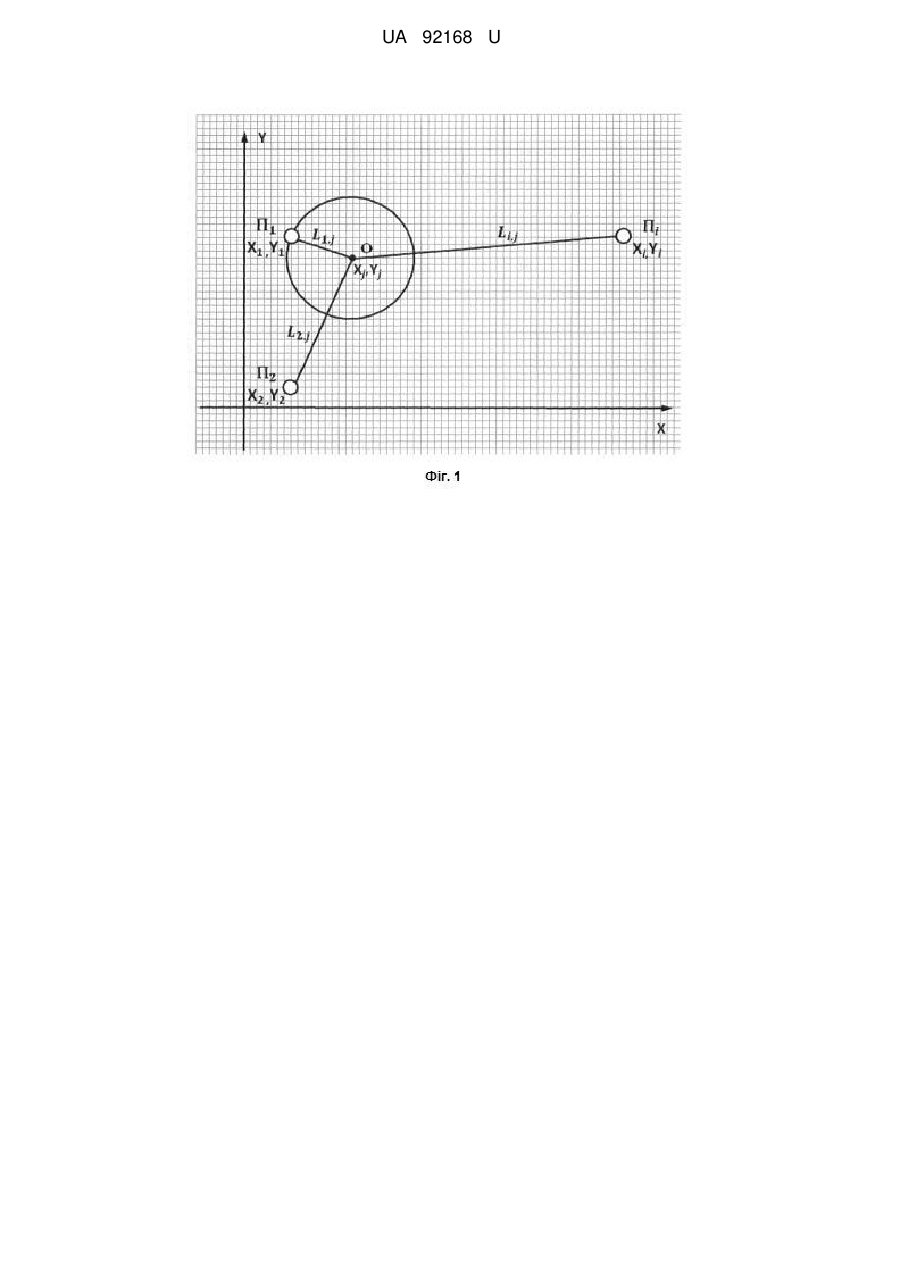
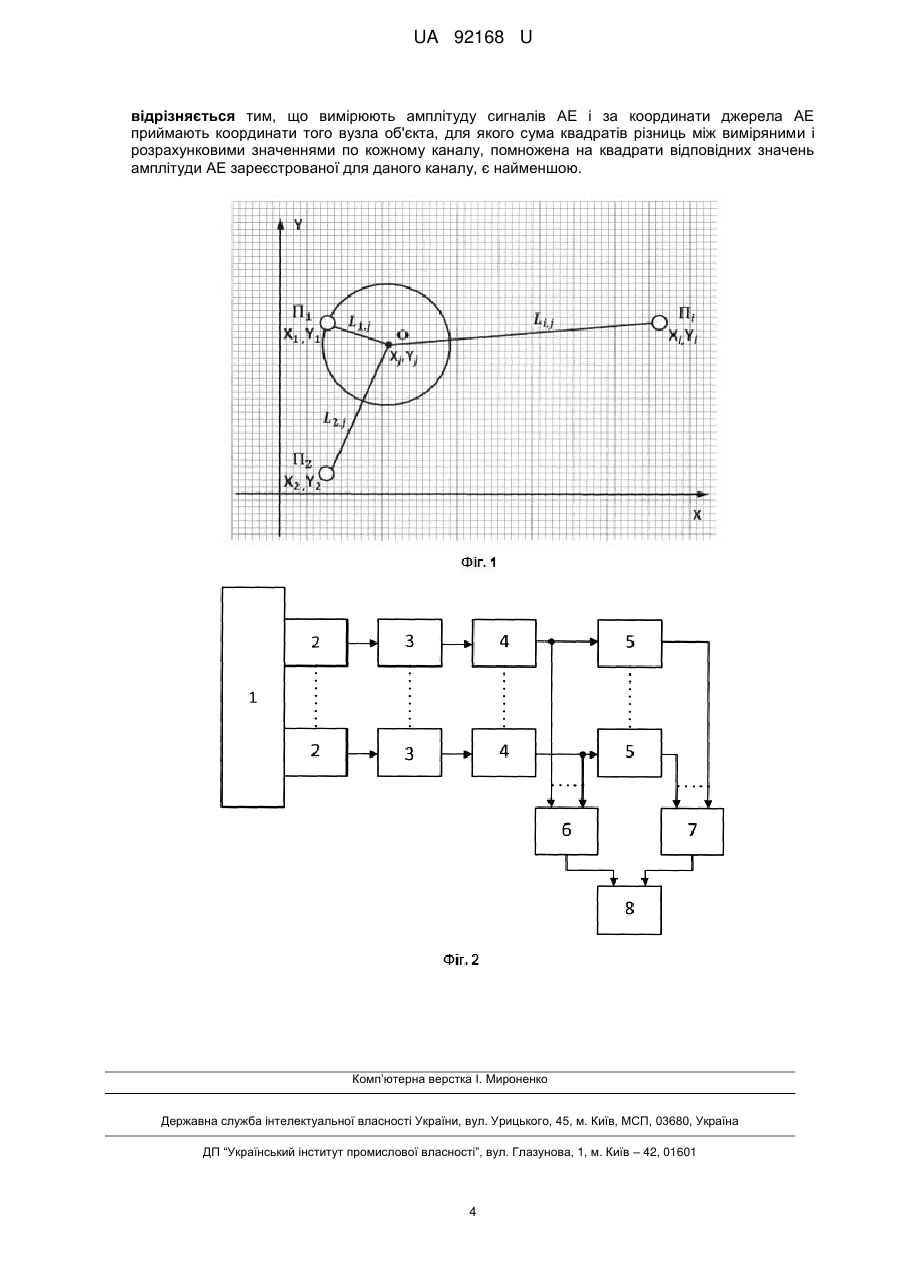
Реферат: Спосіб визначення координат джерел акустичної емісії полягає в тім, що групою каналів з приймальними перетворювачами приймають сигнали акустичної емісії, для окремої події АЕ по кожному каналу вимірюють різницю часу приходу сигналів, об'єкт розділяють скінченими елементами, для кожного вузла об'єкта по відомих координатах приймальних перетворювачів та відомій швидкості розповсюдження ультразвукових коливань розраховують відповідні різниці часу приходу сигналів АЕ до кожного приймального перетворювача, по виміряних та розрахованих різницях часу приходу сигналів АЕ визначають координати джерела АЕ. З метою підвищення точності визначення координат джерел АЕ, вимірюють амплітуду сигналів АЕ і за координати джерела АЕ приймають координати того вузла об'єкта, для якого сума квадратів різниць між виміряними і розрахунковими значеннями по кожному каналу, помножена на квадрати відповідних значень амплітуди АЕ зареєстрованої для даного каналу, є найменшою. UA 92168 U (54) СПОСІБ ВИЗНАЧЕННЯ КООРДИНАТ ДЖЕРЕЛ АКУСТИЧНОЇ ЕМІСІЇ UA 92168 U UA 92168 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель, що заявляється, належить до неруйнівного контролю об'єктів акустикоемісійним (АЕ) методом і може бути використана в машинобудівній, енергетичній, металообробній і інших галузях промисловості. Відомий спосіб визначення координат джерел акустичної емісії, який полягає в тому, що сигнали АЕ приймають чотирма приймальними перетворювачами, вимірюють різниці часів приходу сигналів на перетворювачі, обчислюють тріангуляційні параметри джерел сигналів і за ними визначають координати джерел сигналів (А.с. № 725016. Анисимов В.К., Вайнберг В.Е., Соседов В.Н. Способ определения координат источников дискретних сигналов акустической эмиссии. Бюл. № 12, 1980 р. [1]). Недоліком відомого способу є те, що можуть бути використані лише чотири приймальних перетворювача, які повинні бути розташовані на поверхні контрольованого об'єкту в вигляді квадрату. Ці умови ускладнюють або роблять неможливим контроль об'єктів неправильної чи довільної форми, а також об'єктів великих розмірів внаслідок загасання сигналів АЕ при їх розповсюдженні. Найбільш близьким до об'єкта, що заявляється, є спосіб визначення координат джерел акустичної емісії, який полягає в тім, що на контрольованому об'єкті встановлюються приймальні перетворювачі АЕ з відомими координатами, приймають сигнали АЕ при контролі об'єкту приймальними перетворювачами, вимірюють різниці часів приходу до них сигналів АЕ, розгортка поверхні об'єкту розділяється координатною сіткою, для кожного вузла сітки розраховуються відстані до перетворювачів і по відомій швидкості розповсюдження ультразвукових коливань розраховують різниці часів приходу сигналів до перетворювачів, і за координати джерела АЕ приймають координати того вузла сітки, для якого сума квадратів різниць між виміряними і розрахунковими значеннями різниць часу приходу сигналів по кожному каналу, є найменшою (Серьезнов Ф.Н., Степанова В.В., Муравьев В.В и др. Акустикоэмиссионная диагностика конструкций. М.,"Радио и связь", 2000, - С. 108-109 [2]). Цей спосіб дає змогу контролювати об'єкти за допомогою будь-якого числа приймальних перетворювачів, але не менше двох для одномірних, не менше трьох для двомірних і не менше чотирьох для тримірних об'єктів при їх довільному розташуванні на контрольованому об'єкті. При використанні значно більшої кількості перетворювачів, можна контролювати великі об'єкти. Другою перевагою зазначеного способу є доволі нескладний математичний апарат, який використовується для визначення координат джерел АЕ. Недоліком відомого способу є те, що сумарна похибка визначення координат джерела АЕ залежить від значень швидкостей розповсюдження ультразвукових коливань від різно віддалених приймальних перетворювачів. При цьому похибка значення швидкості розповсюдження ультразвукових коливань яка використовується при розрахунках координати, призводить до різних абсолютних значень похибок розрахованих різниць часу приходу сигналів АЕ до кожного приймального перетворювача (в залежності від відстані від джерела АЕ до відповідного приймального перетворювача). Чим більша відстань до перетворювача, тим більше абсолютна похибка розрахованої різниці часу приходу. Враховуючи те, що прийняті сигнали АЕ для більш віддалених приймальних перетворювачів внаслідок затухання мають меншу амплітуду та меншу крутизну передніх фронтів, по яких вимірюється різниця часу приходу, значення різниць часу приходу сигналів до найбільш віддалених від джерела АЕ також мають найбільшу похибку вимірювань. В основу корисної моделі поставлено задачу підвищення точності визначення координат джерел АЕ в контрольованих об'єктах при використанні декількох приймальних перетворювачів (більш ніж мінімально необхідно) шляхом зменшення впливу як розрахункової, так і вимірюваної різниці часу приходу сигналів АЕ до найбільш віддалених приймальних перетворювачів. Поставлена задача вирішується тим, що у відомому способі визначення координат джерел АЕ, для окремої події АЕ вимірюють різниці часу приходу сигналів до кожного приймального перетворювач, а об'єкт розділяють на скінчені елементи, для кожного вузла об'єкта по відомих координатах приймальних перетворювачів і відомій швидкості розповсюдження ультразвукових коливань розраховують відповідні різниці часу приходу сигналів АЕ до кожного приймального перетворювача, по виміряних та розрахованих різницях часу приходу сигналів АЕ визначають координати джерела АЕ; згідно заявленої корисної моделі, в процесі контролю вимірюють по кожному каналу також амплітуду сигналів АЕ прийнятих кожним перетворювачем і за координати джерела АЕ визнають координати того вузла об'єкта, для якого сума квадратів різниць між виміряними і розрахунковими значеннями різниць часу приходу сигналів, помноженими на квадрат відповідного значення зареєстрованої для даного каналу амплітуди АЕ, є найменшою. 1 UA 92168 U 5 10 В процесі контролю в разі розвитку дефекту в контрольованому об'єкті генеруються дискретні сигнали АЕ, які поширюються з певною швидкістю. З моменту приходу імпульсу АЕ до найближчого перетворювача починається відлік виміряних різниць часу приходу сигналів АЕ (Δτi) на інші більш віддалені перетворювачі. Виміряні значення різниць часу приходу для більш віддалених перетворювачів мають більшу абсолютну похибку внаслідок меншої амплітуди і меншої крутизни імпульсів АЕ. Для розрахунку координат джерела АЕ контрольований об'єкт поділяється на скінчені елементи. У випадку тримірного об'єкту останній ділиться на об'ємні тримірні скінчені елементи, L наприклад куби, і для кожного j-вузла скінчених елементів визначаються відстані ij до кожного з і-перетворювачів АЕ: L ij 15 X i X j 2 Yi Yj 2 (2) У випадку лінійного одномірного об'єкту, останній ділиться на лінійні елементи, і для кожного L j - вузла скінчених елементів визначаються відстані ij до кожного з і-перетворювачів АЕ: L ij 25 (1) X Y Z де X i , Yi , Z i - координати приймальних перетворювачів, a j , j , j - координати вузла об'єкта. У випадку двомірного об'єкту, він ділиться на плоскі скінчені елементи, наприклад квадрати, L ij і для кожного j-вузла скінчених елементів визначаються відстані до кожного з іперетворювачів АЕ: Lij 20 X i X j 2 Yi Yj 2 Zi Z j 2 X i X j 2 (3) Далі визначається найближчий до даного вузла скінчених елементів приймальний перетворювач і відстань до нього L min , а також розраховуються відповідні різниці часу приходу Tij сигналів АЕ до кожного приймального перетворювача: Tij L ij L min / V; 30 35 40 45 (4) де V - швидкість розповсюдження ультразвукових коливань по поверхні контрольованого об'єкта. Розгортка двомірного об'єкту та схема розташування на ньому i-приймальних перетворювачів представлена на Фіг. 1. Перетворювачі П 1; П2…Пi мають відомі координати X1, Y1; X2, Y2…Xi, Yi. Розгортка об'єкту за допомогою сітки розділена на квадратні скінчені елементи. L Для кожного вузла сітки О з координатами Х j, Yj визначаються відстані до перетворювачів ij , визначається найближчий перетворювач, в даному випадку П1, для якого відстань до вузла L L1j Tij сітки є мінімальною min . По формулі (4) визначаються різниці часу приходу сигналів АЕ до кожного приймального перетворювача. Із формули (4) видно, що при певній похибці в значенні швидкості розповсюдження Tij ультразвукових коливань, розраховані різниці часу приходу сигналів АЕ до кожного перетворювача прямо пропорційні відстані до нього. З іншого боку амплітуда зареєстрованих сигналів для кожного приймального перетворювача зворотно пропорційна його відстані до джерела АЕ. Тому для визначення координат джерела АЕ для кожного вузла скінчених елементів визначають суму квадратів різниць між виміряними і розрахованими значеннями різниць часу приходу сигналів до кожного приймального перетворювача, помноженими на квадрат відповідного значення зареєстрованої для даного перетворювача (каналу) амплітуди АЕ: 2 UA 92168 U A i2 i Tij n 2 (5) , i 1 де A i - амплітуда АЕ, зареєстрована відповідним перетворювачем; i - значення виміряної різниці часу приходу сигналів АЕ; Tij 5 10 15 20 25 30 35 40 - значення розрахованої різниці часу приходу сигналів АЕ. За місцеположення джерела АЕ приймається той вузол скінчених елементів, для якого n значення i 1 С£°м) розраховане по формулі (5) є найменшим. Заявлена корисна модель реалізується в такий спосіб (фіг. 2). На контрольований об'єкт 1 установлюється група приймальних перетворювачів 2. Сигнали від приймальних перетворювачів 2 підсилюються попередніми підсилювачами 3 і далі піддаються фільтрації й подальшому підсиленню у блоках аналогової обробки 4. Блок вводу аналогових сигналів 6 забезпечує вимірювання амплітуди аналогових сигналів АЕ від кожного із каналів та ввід вимірюваних значень до персонального комп'ютера 8. Водночас аналогові сигнали поступають на амплітудні дискримінатори і формувачі 5, які формують нормовані імпульси по кожному з каналів при перевищенні сигналом АЕ встановленого рівня дискримінації (порога). Сформовані імпульсні сигнали передаються через блок вводу цифрових сигналів 7 до персонального комп'ютера 8 для виміру різниці часів приходу сигналів АЕ до кожного із приймальних перетворювачів (каналів) і наступного розрахунку координат джерел АЕ. Приймальні перетворювачі, які розташовані недалеко від джерела АЕ, приймуть сигнали АЕ відносно великої амплітуди і тому будуть мати відносно велику вагу при визначенні координат джерел АЕ по формулі (5) і, навпаки, для більш віддалених перетворювачів, для яких похибка розрахованих і виміряних різниць часу приходу сигналів більша, амплітуда сигналів АЕ є меншою. Тому вплив останніх на визначення координат джерел АЕ буде меншим, що приведе до зменшення сумарної похибки і підвищення точності визначення координат джерел АЕ. Таким чином, запропонований спосіб дозволяє підвищити точність визначення координат T сигналів АЕ за рахунок зменшення впливу абсолютних похибок як розрахованих ( ij ), так і виміряних ( i ) різниць часу приходу для найбільш віддалених приймальних перетворювачів. Приклад використання способу, який пропонується, було апробовано при акустикоемісійному контролі металоконструкцій секцій шахтних механізованих кріплень в процесі випробувань їх на стенді СТД-2000. Для цього був використаний комплекс акусто-емісійного контролю "КОМПАС" (Радченко В.В., Кулиш В.А., Крылов Э.С., Дроздов А.В., Косарев И.В. Комплекс акустико-эмиссионного контроля КОМПАС. Уголь Украины. - 2011. - № 1. - С. 38-41 [3]) з робочою частотою п'єзоперетворювачів 20-200 кГц. Контролю підлягало перекриття кріплення типу 1КДД. 11.00.000, яке являло собою двомірний об'єкт, на якому в кутах прямокутника 1840 × 1310 мм були розташовані чотири приймальних перетворювачі. Сигнали АЕ імітували імпульсним імітатором з випромінювальним перетворювачем, який встановлювали в різні місця на поверхні перекриття кріплення в межах прямокутника. Для розрахунку координат джерел акустичної емісії використовували спеціально розроблену програму "COMPASS", яка мала модуль "Object2D" з окремою процедурою "GetAE XY1" для визначення координат джерел АЕ двомірного об'єкта за формулами (2), (4), (5). Контрольована поверхня ділилась на квадратні скінчені елементи зі стороною, яку можна було змінювати в межах 1-5 см. По результатах акустико-емісійного контролю шахтних кріплень типу 1КДД. 11.00.000 похибка визначення, координат джерел АЕ не перевищувала 10-12 см, що підтверджує доцільність і ефективність корисної моделі, яка запропонована. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Спосіб визначення координат джерел акустичної емісії, який полягає в тім, що групою каналів з приймальними перетворювачами приймають сигнали акустичної емісії, для окремої події АЕ по кожному каналу вимірюють різницю часу приходу сигналів, об'єкт розділяють скінченими елементами, для кожного вузла об'єкта по відомих координатах приймальних перетворювачів та відомій швидкості розповсюдження ультразвукових коливань розраховують відповідні різниці часу приходу сигналів АЕ до кожного приймального перетворювача, по виміряних та розрахованих різницях часу приходу сигналів АЕ визначають координати джерела АЕ, який 3 UA 92168 U відрізняється тим, що вимірюють амплітуду сигналів АЕ і за координати джерела АЕ приймають координати того вузла об'єкта, для якого сума квадратів різниць між виміряними і розрахунковими значеннями по кожному каналу, помножена на квадрати відповідних значень амплітуди АЕ зареєстрованої для даного каналу, є найменшою. Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюDrozdov Oleksandr Volodymyrovych, Krylov Edyard Samiilovych
Автори російськоюДроздов Александр Владимирович, Крылов Эдуард Самойлович
МПК / Мітки
МПК: G01N 29/04
Мітки: акустичної, координат, визначення, джерел, емісії, спосіб
Код посилання
<a href="https://ua.patents.su/6-92168-sposib-viznachennya-koordinat-dzherel-akustichno-emisi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат джерел акустичної емісії</a>
Спосіб визначення координат джерел акустичної емісії
Номер патенту: 80929
Опубліковано: 10.06.2013
Автори: Крилов Едуард Самійлович, Дроздов Олександр Володимирович
МПК: G01N 29/04
Мітки: визначення, спосіб, координат, джерел, емісії, акустичної
Формула / Реферат:
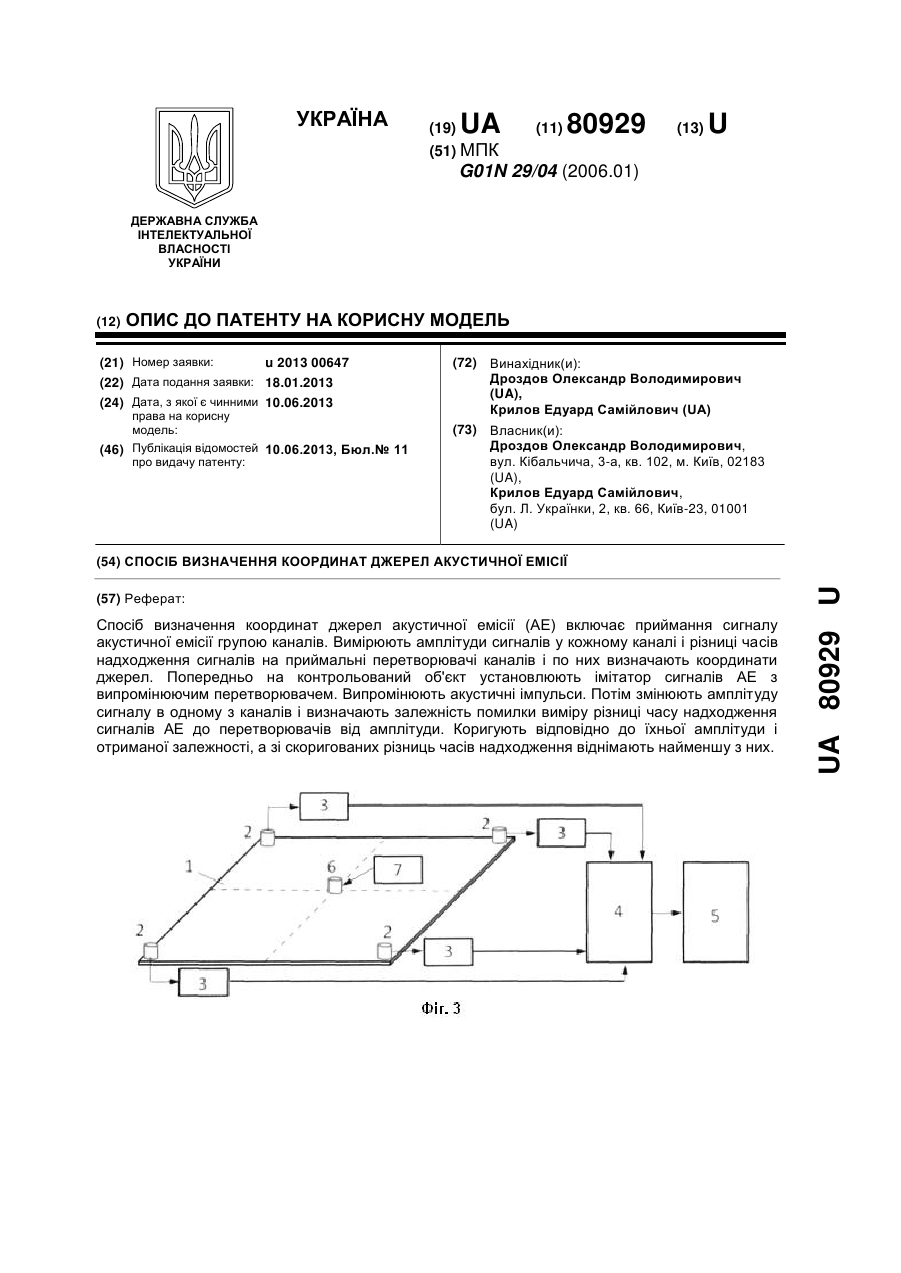
1. Спосіб визначення координат джерел акустичної емісії (АЕ), який полягає в тому, що приймають сигнали акустичної емісії групою каналів, вимірюють амплітуди сигналів у кожному каналі й різниці часів надходження сигналів на приймальні перетворювачі каналів і по них визначають координати джерел, який відрізняється тим, що для підвищення точності визначення координат джерел АЕ, попередньо на контрольований об'єкт, на рівній відстані від двох...
Спосіб визначення координат дефектів методом акустичної емісії
Номер патенту: 43125
Опубліковано: 15.11.2001
Автори: Ройзман Вілен Петрович, Горошко Андрій Володимирович, Ковтун Ігор Іванович, Прохоренко Сергій Вікторович
МПК: G01N 29/14
Мітки: спосіб, дефектів, координат, акустичної, емісії, визначення, методом
Формула / Реферат:
Спосіб визначення координат дефектів методом акустичної емісії (АЕ), що полягає у реєстрації хвиль акустичного діапазону, генерованих досліджуваним об'єктом під впливом зовнішньої енергетичної дії, за допомогою групи скорельованих акустичних давачів та визначенні різниці часу приходу переднього фронту хвилі, утвореного у місці розташування дефектоутворюючої неоднорідності у матеріалі об'єкта, обчисленні координат джерела реєстрованого...
Спосіб визначення координат дефектів методом акустичної емісії
Номер патенту: 51981
Опубліковано: 16.12.2002
Автори: Ковтун Ігор Іванович, Ройзман Вілен Петрович, Горошко Андрій Володимирович
МПК: G01N 29/04
Мітки: акустичної, координат, методом, емісії, спосіб, дефектів, визначення
Формула / Реферат:
Спосіб визначення координат дефектів методом акустичної емісії (АЕ), який полягає у реєстрації хвиль акустичного діапазону, генерованих досліджуваним об'єктом під впливом зовнішньої енергетичної дії, за допомогою cкорельованих акустичних давачів та визначенні різниці часу надходження переднього фронту хвилі, утвореного у місці розташування дефектоутворювальної неоднорідності у матеріалі об'єкту, обчисленні координат джерела реєстрованого...
Пристрій для визначення координат джерела акустичної емісії
Номер патенту: 41138
Опубліковано: 15.08.2001
Автори: Ковтун Ігор Іванович, Прохоренко Сергій Вікторович, Ройзман Вілен Петрович, Горошко Андрій Володимирович
МПК: G01N 29/04
Мітки: пристрій, джерела, координат, емісії, акустичної, визначення
Формула / Реферат:
Пристрій для визначення координат джерела акустичної емісії триангуляційним акусто-емісійним (АЕ) методом, що містить чотири приймально - підсилювальних канали, кожен із яких складається з послідовно з'єднаних п'єзопсрстворювача (АЕ - датчика), попереднього підсилювача та підсилювача фільтрів, виходи якого з'єднано з входами формувача осциляцій і подій, формувача пікових значень амплітуди і блоком лінійних координат, які, в свою чергу,...
Спосіб діагностування магістральних продуктопроводів методом акустичної емісії (варіанти)
Номер патенту: 79488
Опубліковано: 25.06.2007
Автори: Вітвицький Віталій Веліксович, Харєбов Владімір Георгієвич, Варибрусов Сергій Тимофійович
МПК: G01M 3/24, G01N 29/14
Мітки: діагностування, варіанти, продуктопроводів, методом, емісії, акустичної, магістральних, спосіб
Формула / Реферат:
1. Спосіб діагностування магістральних продуктопроводів методом акустичної емісії, який включає підготовку продуктопроводу до операції контролю, перевірку працездатності приладів, контроль методом акустичної емісії, фіксацію робочого тиску в продуктопроводі, навантаження продуктопроводу у відповідності до графіка зміни тиску, обробку результатів, який відрізняється тим, що при підборі графіка кривої навантажування стимуляцію акустичного...
Попередній патент: Спосіб культивування хондроцитів міжхребцевих дисків людини
Наступний патент: Універсальна кімнатна антена для телевізора
Випадковий патент: Спосіб експлуатації газоконденсатної свердловини