Екзокістяк з системою навантаження м’язів людини
Формула / Реферат
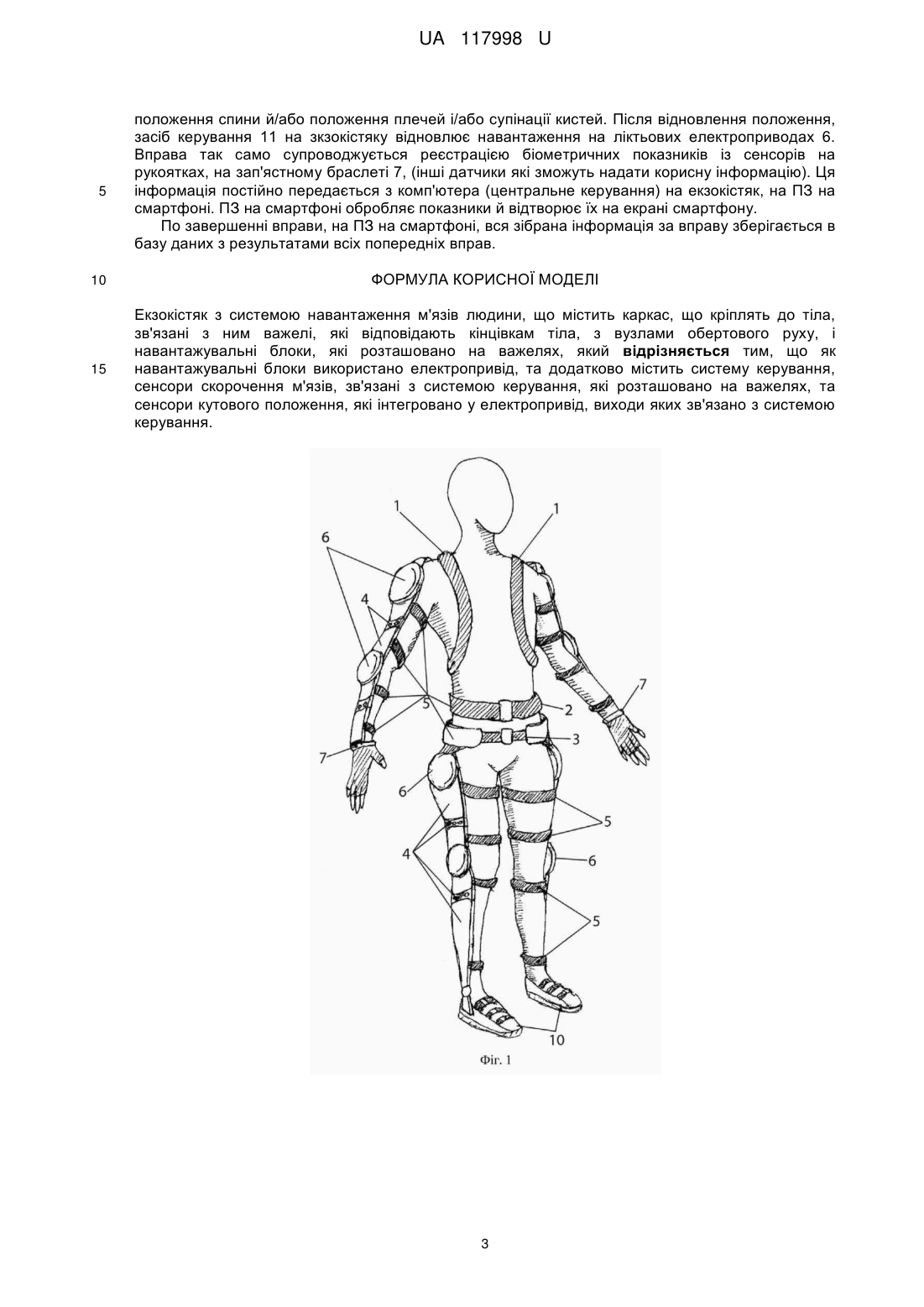
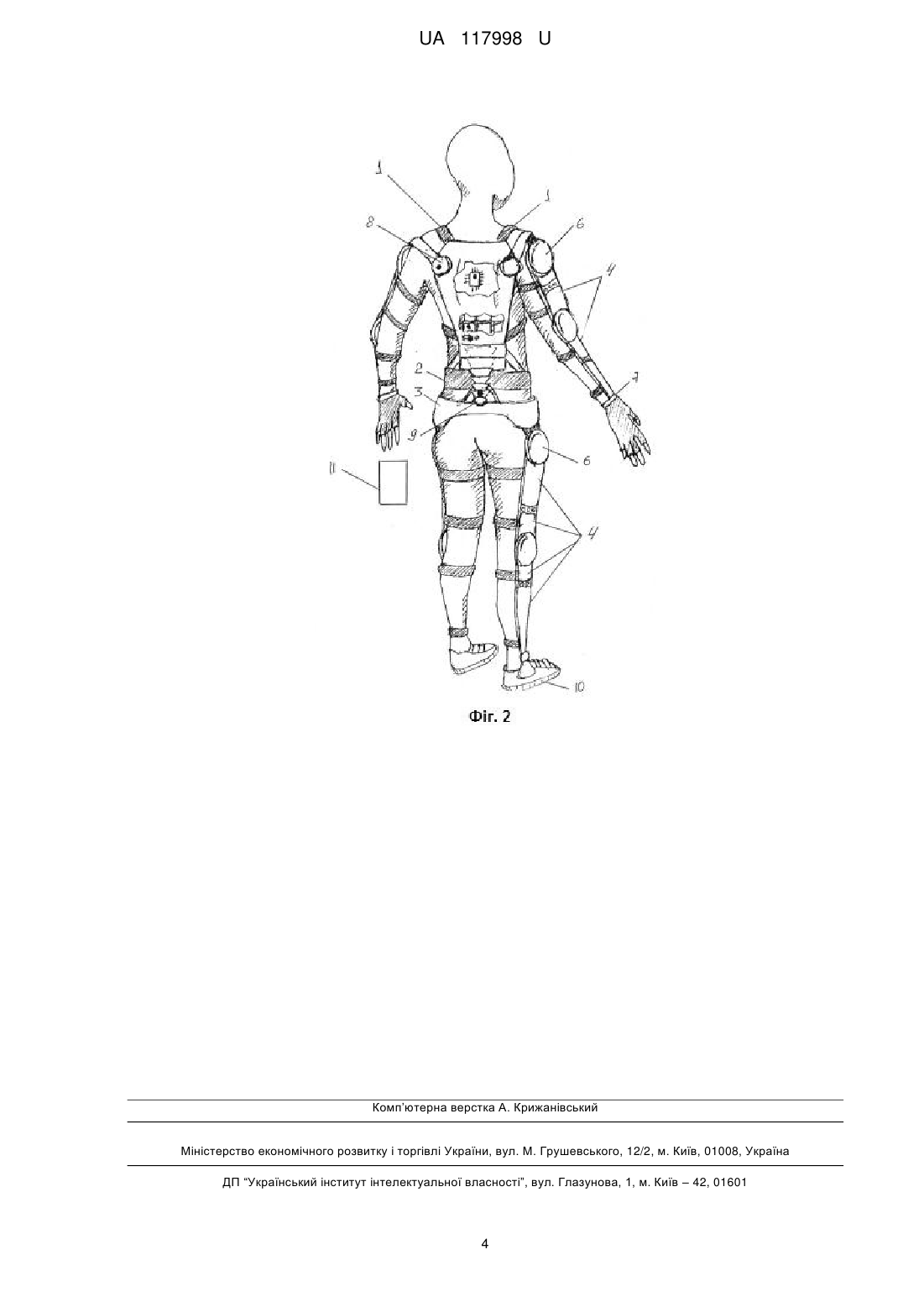
Екзокістяк з системою навантаження м'язів людини, що містить каркас, що кріплять до тіла, зв'язані з ним важелі, які відповідають кінцівкам тіла, з вузлами обертового руху, і навантажувальні блоки, які розташовано на важелях, який відрізняється тим, що як навантажувальні блоки використано електропривід, та додатково містить систему керування, сенсори скорочення м'язів, зв'язані з системою керування, які розташовано на важелях, та сенсори кутового положення, які інтегровано у електропривід, виходи яких зв'язано з системою керування.
Текст
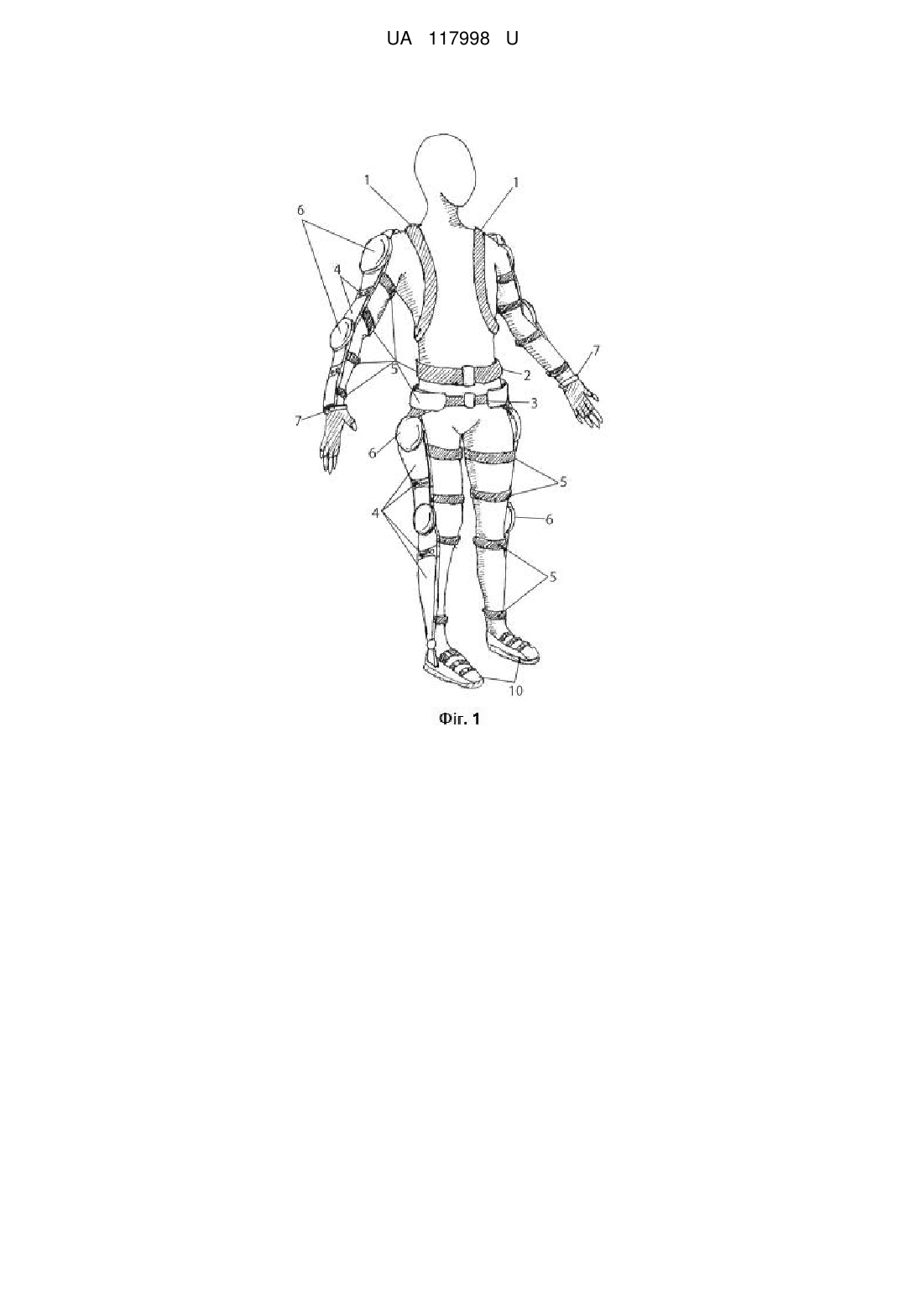
Реферат: Екзокістяк з системою навантаження м'язів людини містить каркас, що кріплять до тіла, зв'язані з ним важелі, які відповідають кінцівкам тіла, з вузлами обертового руху, і навантажувальні блоки, які розташовано на важелях. Як навантажувальні блоки використано електропривід додатково містить систему керування, сенсори скорочення м'язів, зв'язані з системою керування, які розташовано на важелях, сенсори кутового положення, які інтегровано у електропривід, виходи яких зв'язано з системою керування. UA 117998 U (54) ЕКЗОКІСТЯК З СИСТЕМОЮ НАВАНТАЖЕННЯ М'ЯЗІВ ЛЮДИНИ UA 117998 U UA 117998 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі фізичної культури, а само до пристроїв, які забезпечують утворення навантаження на м'язи, та може бути використано для збільшення маси м'язів як при відновленні атрофованих м'язів, так і для тренування спортсменів. З існуючого рівня техніки, який стосується розглянутої галузі, найбільш близьким, по сукупності ознак, до корисної моделі, яка заявляється, є екзокістяк з системою навантаження м'язів людини, який виконано з жорсткого каркаса, який кріпиться до тіла людини, і який складається з телескопічних важелів, які відповідають кінцівкам тіла, і які зв'язані між собою навантажувальними блоками, що розташовано у місцях, які відповідають згину кінцівок, причому кожний навантажувальний блок виконано у вигляді корпусу з двома порожнинами що заповнено рідиною, наприклад мастилом, усередині якого встановлено вал, який з'єднаний з телескопічними важелями та з'єднаний із навантажувальною пластиною, що взаємодіє заслінкою, яка перепускає рідину з однієї порожнини в іншу, переміщення якої обмежено обмежником руху, а самі навантажувальні блоки розташовано у місцях осевого обертання кінцівок та встановлено на вузлах осевого поворотного обертання, які жорстко закріплено на каркасі, та виконано у вигляді поворотної скоби, яка фіксується роликами, і яка має зубчастий фрагмент для передачі обертання через шестерні, зв'язані з валом [патент РФ на винахід № 2500446 МПК: А63В 21/00, публ. 2012]. Корисна модель, яка заявляється, збігається з відомим екзокістяком з системою навантаження м'язів людини по наступній сукупності суттєвих ознак, а саме містить каркас, який кріпиться до тіла, зв'язані з ним важелі, які відповідають кінцівкам тіла, з вузлами обертового руху, і навантажувальні блоки, які розташовано на важелях. Однак відомий екзокістяк з системою навантаження м'язів людини не забезпечує технічного результату корисної моделі, яка заявляється, що обумовлено його конструкцією, а саме, виконання навантажувальних блоків, які забезпечують навантаження на м'язи, і які утворено складною гідравлічною системою та забезпечує навантаження м'язів за рахунок переміщення рідини з однієї порожнини в іншу, що забезпечується обертовим рухом навантажувальної пластини, а швидкість переміщення регулюється заслінкою, яка містить механічний регулятор, виконаний у вигляді обмежником руху, і яка забезпечує обмеження швидкості проходження мастила з однієї ємності в іншу, що відповідно, зменшує швидкість обертового руху вала, та визначає статичне навантаження на м'язи, яке не змилюється динамічно, відповідно до фізичних зусиль, що утворюють м'язи. В основу корисної моделі поставлена задача в удосконалення відомого екзокістяка з системою навантаження м'язів людини шляхом зміни його конструкції, що забезпечить динамічне навантаження на м'язи людини, яке відповідає фізичним зусиллям, що утворюють м'язи. Поставлена задача вирішується тим, що екзокістяк з системою навантаження м'язів людини містить каркас, що кріплять до тіла, зв'язані з ним важелі, які відповідають кінцівкам тіла, з вузлами обертового руху, і навантажувальні блоки, які розташовано на важелях. Як навантажувальні блоки використано електропривід, додатково містить систему керування, сенсори скорочення м'язів, зв'язані з системою керування, які розташовано на важелях, сенсори кутового положення, які інтегровано у електропривід, виходи яких зв'язано з системою керування. Зазначена сукупність суттєвих ознак забезпечує корисної моделі, яка заявляється, динамічне навантаження на м'язи людини, яке відповідає фізичним зусиллям, що утворюють м'язи. Суть корисної моделі пояснюють креслення. Фіг. 1 - загальний вигляд екзокістяка з системою навантаження м'язів людини попереду; Фіг. 2 - загальний вигляд екзокістяка з системою навантаження м'язів людини позаду. Запропонований екзокістяк з системою навантаження м'язів людини містить м'який каркас, який утворено плечовими 1, поперековим 2 та стегновим 3 бандажами, які виконано у вигляді ременів з застібками, до яких кріпляться важелі 4, які мають рейкову конструкцію, що забезпечує можливість їх регулювання відповідно до розмірів кінцівок, і які фіксуються на кінцівках засобами фіксації 5, які виконано, наприклад, у вигляді ременів з застібками, та споряджені приводами 6, наприклад, електричними або пневматичними або гідравлічними, і які розташовані по суглобах кінцівок, та інтегровані з сенсорами кутового переміщення, а на зап'ястку розміщено браслети 7, які забезпечують фіксацію ліктьової частини важелів 4 верхніх кінцівок та містять інтегровані до них сенсори біоритмів серцебиття з засобами миттєвого відключення приводів 6. На спині розміщено блоки 8 з електроприводами, які забезпечують зменшення навантаження на спину та куприк, та рознім 9 для підключення електричного живлення. Стопи користувача обпираються на підставки 10 з інтегрованими датчиками тиску та 1 UA 117998 U 5 10 15 20 25 30 35 40 45 50 55 60 ваги, які фіксуються за допомогою засобів фіксації 5, які можуть бути виконані у вигляді ременів з застібками. Крім того, до складу екзокістяка входять і засоби керування 11, що складається з комп'ютера з процесором та оперативною пам'яттю, флеш-пам'ять, модуля вай-фай та блютуз, один порт якого зв'язний з сенсорними датчиками, а інший з приводами. Запропонований екзокістяк з системою навантаження м'язів використовують наступним чином. Екзокістяк розміщують на людині, для чого на її тулуб одягають плечові 1, поперекові 2 та стегнові 3 бандажі, які виконано у вигляді ременів з застібками. Програмне забезпечення (ПЗ), що розміщено на смартфоні (тримає у руках пілот, який одягнений у екзокістяк, або тренер) містить базу даних вправ та рівень навантаження. Після вибору вправ або програми вправ ПЗ на смартфоні подає завдання на комп'ютер засобу керування екзокістяком. Комп'ютер екзокістяка оброблює завдання і подає сигнал у відповідні приводи 6, які відтворюють задане навантаження та у заданих інтервалах. Екзокістяк приходить у дію за рахунок електричної енергії від мережі або від акумуляторів. Сенсори, які інтегровано у приводи 6, фіксують направлення та швидкість кутових змін у приводах 6 та передають сигнали на засіб керування 11, який оброблює інформацію, після чого подає сигнал на ПЗ смартфона, та фіксує результат вправи. Якщо швидкість виконання вправи менше, ніж тої, що встановлена попередньо в ПЗ швидкості, ПЗ подає сигнал на засіб керування 11 екзокістяком про поступове зменшення навантаження, та триває доки швидкість руху приводів 6 не досягне мінімальної припустимої, що попередньо задана у ПЗ. Уся інформація, яка зібрана з сенсорів, інтегрованих у відповідних конструктивних елементах екзокістяка, передається на ПЗ смартфону та зберігається у базі даних. Спеціальний алгоритм на підставі цієї бази даних та веденням референцій користувача, вибирає наступні вправи. Запропонований екзокістяк може працювати у різних варіантах навантаженнях: 1. Ізовейт - навантаження з постійним наданням сили опору; 2. Ізоспід - навантаження з постійною швидкістю опору, причому швидкість може бути вибрана у ПЗ будь-яка. Залежно від мети: робота на білі або червони волокна м'язів. Швидкість велика - багато повторень до відмови або швидкість мала - мало повторів до відмови. 3. Динамічне навантаження: навантаження збільшується або зменшується, функція зміни навантаження може бути лілейною або будь-якою іншою; 4. Статичне навантаження. У цьому випадку усі рухи можуть бути розділено на сектори з зупинками на встановлених кутових значеннях. У цих запинках рух уповільнюється до зупинки. Суглоб пручається до такого ступеня, що рух зупиняється на декілька секунд. 5 Опір туди та зворотно, в цьому випадку одночасно у одній вправі по черзі працюють обидві м'язи-антагоністи, наприклад, біцепс-трицепс. 6. Опір з швидкістю, що змінюється: або убиваючою, або такою, що збільшується. Параметром, як і у другому випадку, є функція - швидкість. Приклад 1 Вправа на тренування біцепсів у сидячому положенні без кистьової супінації. Екзокістяк розміщують на пілоті, для чого на її тулуб одягають плечові 1, поперекові 2 та стегнові 3 бандажі, які виконано у вигляді ременів з застібками. У даній вправі задіяні приводи 6, наприклад електроприводи, розташовані на верхніх кінцівках, а конкретно ліктьові й плечові електроприводи. Після вибору вправи на ПЗ на смартфоні, засіб керування 11 на екзокістяку активує тазові електроприводи 6 й сенсори на спині, які визначають правильність положення корпуса й вигину спини для мінімізації травмонебезпеки й максимізації ефективності вправи. Приклад 2 Вправа на тренування біцепсів в сидячому положенні без кистьової супинации. Після того як пілот прийняв правильне положення, засіб керування 11 на екзоткістяку активує сенсори на ліктьових електроприводах 6, які реєструють кількість і швидкість виконання повторень вправи, і ліктьові електроприводи, які видають задану на ПЗ або полічену на ПЗ алгоритмом навантаження. Одночасно з ліктьовими електроприводами 6 активуються сенсори на кистях і на плечових електроприводах, які в даній вправі як і сенсори на тазових електроприводах 6 і сенсори на спині, працюють протягом усього вправи й відповідають за правильність виконання заданої вправи. У випадку якщо сенсори на плечових та тазових електроприводах 6 або сенсори на спині або на кистях фіксують відхилення від заданих ПЗ доступних рухів, вони подають сигнал на засіб керування 11 на екзокістяку, що зменшує навантаження на ліктьових електроприводах 6 і відправляє сигнал на ПЗ на смартфоні, що, у свою чергу, видає візуальний і звуковий сигнал із причиною зменшення навантаження й видає візуальне й звукове прохання про відновлення правильного положення корпуса й/або 2 UA 117998 U 5 положення спини й/або положення плечей і/або супінації кистей. Після відновлення положення, засіб керування 11 на зкзокістяку відновлює навантаження на ліктьових електроприводах 6. Вправа так само супроводжується реєстрацією біометричних показників із сенсорів на рукоятках, на зап'ястному браслеті 7, (інші датчики які зможуть надати корисну інформацію). Ця інформація постійно передається з комп'ютера (центральне керування) на екзокістяк, на ПЗ на смартфоні. ПЗ на смартфоні обробляє показники й відтворює їх на екрані смартфону. По завершенні вправи, на ПЗ на смартфоні, вся зібрана інформація за вправу зберігається в базу даних з результатами всіх попередніх вправ. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Екзокістяк з системою навантаження м'язів людини, що містить каркас, що кріплять до тіла, зв'язані з ним важелі, які відповідають кінцівкам тіла, з вузлами обертового руху, і навантажувальні блоки, які розташовано на важелях, який відрізняється тим, що як навантажувальні блоки використано електропривід, та додатково містить систему керування, сенсори скорочення м'язів, зв'язані з системою керування, які розташовано на важелях, та сенсори кутового положення, які інтегровано у електропривід, виходи яких зв'язано з системою керування. 3 UA 117998 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A63B 21/00
Мітки: навантаження, м'язів, екзокістяк, системою, людини
Код посилання
<a href="https://ua.patents.su/6-117998-ekzokistyak-z-sistemoyu-navantazhennya-myaziv-lyudini.html" target="_blank" rel="follow" title="База патентів України">Екзокістяк з системою навантаження м’язів людини</a>
Пристрій керування системою динамічного навантаження двигунів постійного струму
Номер патенту: 44768
Опубліковано: 12.10.2009
Автори: Родькін Дмитро Йосипович, Сергієнко Сергій Анатолійович, Коваль Віталій Анатолійович, Козак Ольга Олександрівна
МПК: G01R 31/34
Мітки: динамічного, системою, керування, постійного, струму, двигунів, навантаження, пристрій
Формула / Реферат:
Пристрій керування системою динамічного навантаження двигунів постійного струму, що включає випробовуваний двигун, який з'єднаний через датчик струму з якірним ланцюгом генератора постійного струму паралельного збудження, напруга на якому контролюється датчиком, збуджувач двигуна, з'єднаний через датчик струму з обмоткою збудження двигуна, напруга на якій контролюється датчиком напруги обмотки збудження двигуна, датчик швидкості обертання...
Спосіб визначення величини навантаження на одиницю поверхні кульшового суглоба людини
Номер патенту: 78140
Опубліковано: 15.02.2007
Автори: Лимар Євген Вікторович, Гайко Георгій Васильович
МПК: A61B 5/11, A61B 5/107
Мітки: суглоба, спосіб, людини, величини, навантаження, одиницю, визначення, кульшового, поверхні
Формула / Реферат:
Спосіб визначення величини навантаження на одиницю поверхні кульшового суглоба людини, який включає виконання рентгенографії ураженого кульшового cуглоба у передньо-задній проекції та здійснення огляду за осями нижніх кінцівок, який відрізняється тим, що додатково визначають вагу тіла людини у положенні стоячи, виконують подографію і денситометрію ураженої кінцівки та рентгенографію колінного суглоба тієї ж кінцівки, вимірюють площу поверхні...
Спосіб визначення витрат енергії в спокої та після фізичного навантаження у людини
Номер патенту: 48758
Опубліковано: 25.03.2010
Автори: Хайрнасов Руслан Наільович, Передерій Вячеслав Григорович
МПК: G01N 33/535, A61B 5/08
Мітки: витрат, визначення, спокої, людини, енергії, спосіб, фізичного, навантаження
Формула / Реферат:
Спосіб визначення витрат енергії в спокої та після фізичного навантаження у людини, що передбачає визначення витрат енергії організму, який відрізняється тим, що визначають індивідуальні витрати енергії за допомогою 13С-бікарбонатного дихального тесту в два етапи ранком та ввечері, при цьому як субстрат для дослідження використовують 50 мг 13С-міченого бікарбонату, розчиненого в 200 мл теплого чаю, на кожному етапі отримують 16 дихальних...
Спосіб оцінки стану серцево-судинної системи людини під дією дозованого фізичного навантаження
Номер патенту: 115985
Опубліковано: 10.05.2017
Автори: Лукаш Сергій Іванович, Будник Микола Миколайович, Вакал Лариса Петрівна, Лукаш Любов Леонідівна
МПК: A61B 5/02
Мітки: фізичного, навантаження, дозованого, оцінки, спосіб, людини, серцево-судинної, системі, стану, дією
Формула / Реферат:
1. Спосіб оцінки стану серцево-судинної системи людини під дією дозованого фізичного навантаження шляхом реєстрації ЕКГ серця людини не менш ніж в одному із 12-ти загальноприйнятих відведень згідно з тестами PWC170 та Руф'є-Діксона (РД) протягом 3-х періодів дослідження - до навантаження, тобто стан спокою, під час навантаження, тобто період адаптації та після закінчення навантаження, тобто період відновлення чи реституції, обчислення частоти...
Спосіб “діма” визначення екстремального інформаційного навантаження людини
Номер патенту: 34958
Опубліковано: 15.03.2001
Автори: Байбурін Роберт Закірович, Дудко Володимир Іванович, Косач Олексій Юрійович, Седаков Ігор Олександрович
МПК: A61B 5/16
Мітки: спосіб, визначення, екстремального, діма, людини, навантаження, інформаційного
Формула / Реферат:
Спосіб визначення екстремального інформаційного навантаження людини, при якому здійснюють тестування в режимі білатерального вибору із трьох подразників з поступовим збільшенням темпу їх, демонстрування на 10 за хвилину кожні 30 с, реєструють і підсумовують неправильні відповіді, основу яких складають події відсутності реагування даною рукою на позитивний подразник для неї, і фігури, які демонструються, виявляють показник перепускної...
Попередній патент: Блок датчиків
Наступний патент: Система моніторингу кількісних характеристик продукту користувача
Випадковий патент: Спосіб визначення пероксидного числа жиру кролів