Спосіб проектування швидкодіючих систем керування гідравлічними пресами

Формула / Реферат
Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми ![]() , обробленні поковки відповідно до графіку технологічного навантаження для конкретного процесу обробки тиском, її деформуванні послідовними натисканнями при роботі преса на відповідному ступені зусиль відкриттям регулюючих клапанів робочих циліндрів, який відрізняється тим, що відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший, базове значення коефіцієнта якості гідросистеми визначають із умови можливості його практичної реалізації в спроектованій системі керування, параметри та елементи гідроліній системи керування вибирають за допомогою діаграми залежності фактора вагомості клапана від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми із застосуванням залежності
, обробленні поковки відповідно до графіку технологічного навантаження для конкретного процесу обробки тиском, її деформуванні послідовними натисканнями при роботі преса на відповідному ступені зусиль відкриттям регулюючих клапанів робочих циліндрів, який відрізняється тим, що відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший, базове значення коефіцієнта якості гідросистеми визначають із умови можливості його практичної реалізації в спроектованій системі керування, параметри та елементи гідроліній системи керування вибирають за допомогою діаграми залежності фактора вагомості клапана від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми із застосуванням залежності
 ,
,
де ![]() - фактор вагомості клапана, МН-1;
- фактор вагомості клапана, МН-1; ![]() - активна площа робочих циліндрів, м2;
- активна площа робочих циліндрів, м2; ![]() - площа прохідного перетину гідролінії, де встановлений регулюючий клапан, м2;
- площа прохідного перетину гідролінії, де встановлений регулюючий клапан, м2; ![]() - площа критичного прохідного перетину регулюючого клапана, м2;
- площа критичного прохідного перетину регулюючого клапана, м2; ![]() - коефіцієнт якості гідросистеми;
- коефіцієнт якості гідросистеми; ![]() перепад тисків між акумулятором та робочими циліндрами гідравлічного преса, МПа,
перепад тисків між акумулятором та робочими циліндрами гідравлічного преса, МПа,
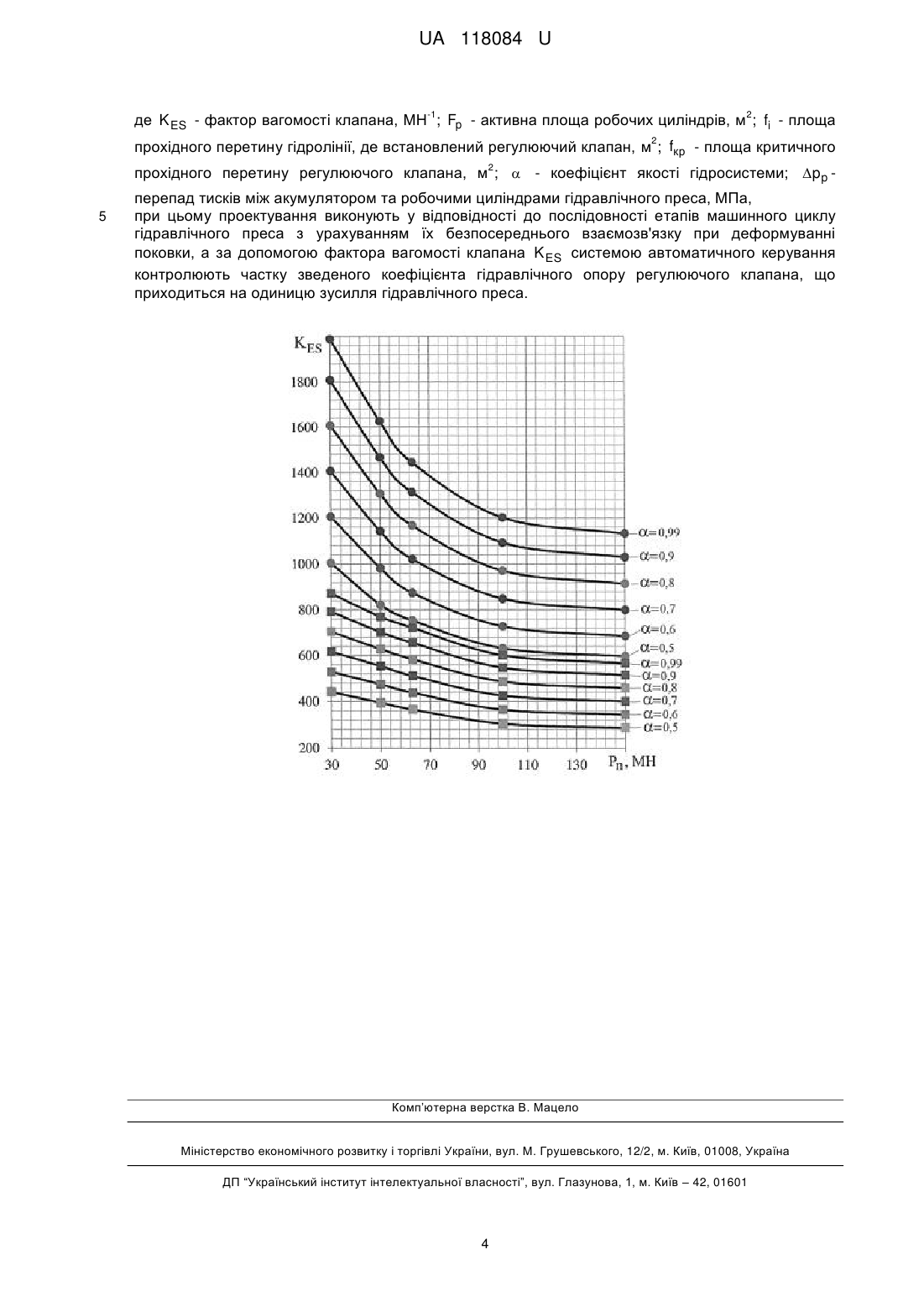
при цьому проектування виконують у відповідності до послідовності етапів машинного циклу гідравлічного преса з урахуванням їх безпосереднього взаємозв'язку при деформуванні поковки, а за допомогою фактора вагомості клапана ![]() системою автоматичного керування контролюють частку зведеного коефіцієнта гідравлічного опору регулюючого клапана, що приходиться на одиницю зусилля гідравлічного преса.
системою автоматичного керування контролюють частку зведеного коефіцієнта гідравлічного опору регулюючого клапана, що приходиться на одиницю зусилля гідравлічного преса.
Текст
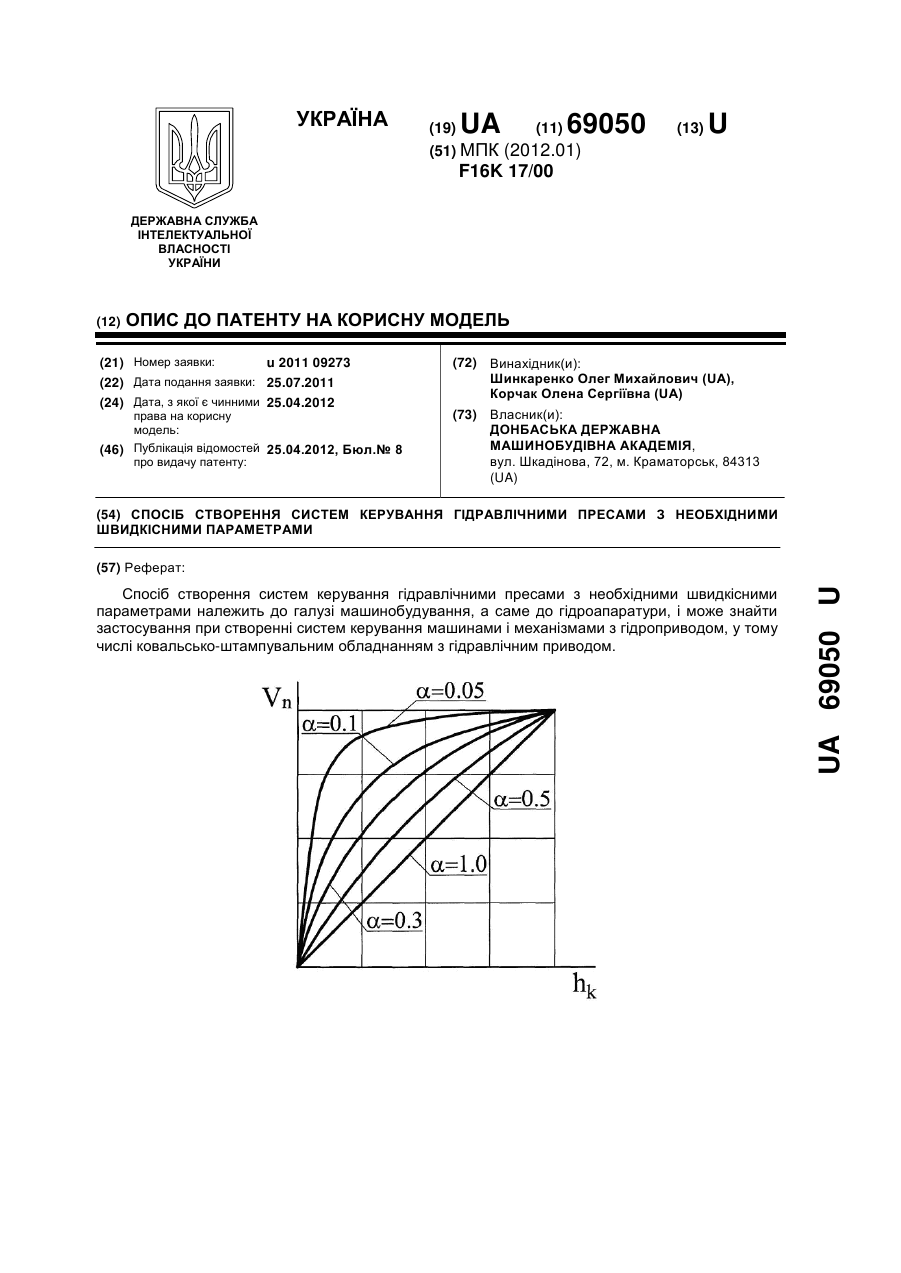
Реферат: UA 118084 U UA 118084 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі машинобудування, а саме до гідроапаратури, і може знайти застосування при створенні систем керування машинами і механізмами з гідроприводом, у тому числі ковальсько-штампувальним обладнанням з гідравлічним приводом. Відомий спосіб отримання необхідної витратної характеристики дросельно-регулюючого клапана гідравлічного преса, згідно з яким для досягнення необхідної лінійної витратної характеристики регулюючого клапана при низькому значенні коефіцієнта якості гідросистеми ( 0,4) здійснюють перепрофілювання лінійного конуса дроселюючого елемента клапана в нелінійний графічним методом. При цьому отримана нелінійність профілю дроселюючого елемента протилежна по знаку нелінійності витратної характеристики [1]. Відомий також, вибраний як прототип, спосіб проектування систем керування гідравлічними пресами, згідно з яким задаються значенням коефіцієнта якості гідросистеми , теоретично за наближеними формулами із застосуванням креслень розводок трубопроводів визначають відповідні параметри гідравлічної системи при умові, що тиск в акумуляторі та величина відкриття регулюючих клапанів постійні. При цьому поковку обробляють відповідно до графіку технологічного навантаження для конкретного процесу обробки тиском, здійснюють її деформування послідовними натисканнями при роботі преса на відповідному ступені зусиль відкриттям регулюючих клапанів робочих циліндрів [2]. Загальними суттєвими ознаками відомого і способу, що заявляється, є: визначення параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми , оброблення поковки відповідно до графіку технологічного навантаження для конкретного процесу обробки тиском, її деформування послідовними натисканнями при роботі преса на відповідному ступені зусиль відкриттям регулюючих клапанів робочих циліндрів. Для цього процесу характерним є низька ефективність внаслідок необхідності виконання складних розрахунків з використанням цехових розводок трубопроводів та урахування великої кількості факторів. До того ж, згідно з цим способом, неможливо на етапі проектування гідравлічного приводу закласти в нього необхідні параметри регулюючих клапанів, що призводить до необхідності перебудування вже виготовленої в металі системи керування для досягнення її необхідних параметрів при здійсненні технологічного навантаження для конкретного процесу обробки тиском. В основу корисної моделі поставлена задача: підвищення ефективності роботи гідравлічних пресів, їх швидкодії та якості керування за рахунок технічного результату, що полягає у підвищенні значення коефіцієнта якості гідросистеми шляхом точного перерозподілу гідравлічного опору між регулюючим клапаном та магістраллю "акумулятор - прес" на етапі проектування гідроприводу та визначення відповідних його параметрів за даними спеціальної діаграми у відповідності до зусилля преса. Поставлена задача вирішується тим, що відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший, базове значення коефіцієнта якості гідросистеми визначають із умови можливості його практичної реалізації в спроектованій системі керування, параметри та елементи гідроліній системи керування вибирають за допомогою діаграми залежності фактора вагомості клапана від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми із застосуванням залежності 2 K ES 45 f Fp i 1 fкр , 2 pp fi -1 2 де K ES - фактор вагомості клапана, МН ; Fp - активна площа робочих циліндрів, м ; fi 2 площа прохідного перетину гідролінії, де встановлений регулюючий клапан, м ; fкр - площа 2 критичного прохідного перетину регулюючого клапана, м ; - коефіцієнт якості гідросистеми; p p перепад тисків між акумулятором та робочими циліндрами гідравлічного преса, МПа 50 при цьому проектування виконують у відповідності до послідовності етапів машинного циклу гідравлічного преса з урахуванням їх безпосереднього взаємозв'язку при деформуванні поковки, а за допомогою фактора вагомості клапана K ES системою автоматичного керування контролюють частку зведеного коефіцієнта гідравлічного опору регулюючого клапана, що приходиться на одиницю зусилля гідравлічного преса. 1 UA 118084 U 5 10 15 20 За рахунок відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший, виконання проектування гідравлічного преса у відповідності до послідовності етапів машинного циклу з урахуванням їх безпосереднього взаємозв'язку, а також застосування діаграми залежності фактора вагомості клапана від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми при визначенні параметрів та елементів гідроліній досягається точний перерозподіл гідравлічного опору між регулюючим клапаном та магістраллю "акумулятор - прес" на етапі проектування гідравлічного приводу. Як результат цього - підвищуються ефективність роботи гідравлічних пресів, їх швидкодія та якість керування. Запропонований спосіб здійснюється таким чином. Задаються значенням коефіцієнта якості гідросистеми, визначають параметри гідравлічної системи, на базі яких проектують систему керування гідравлічним пресом. Здійснюють оброблення поковки, відповідно до графіку технологічного навантаження для конкретного процесу обробки, тиском та її деформування послідовними натисканнями при роботі преса на відповідному ступені зусиль відкриттям регулюючих клапанів робочих циліндрів. Відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший. Базове значення коефіцієнта якості гідросистеми визначають із умови можливості його практичної реалізації в спроектованій системі керування. Параметри та елементи гідроліній системи керування вибирають за допомогою діаграми залежності фактора вагомості клапана від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми із застосуванням залежності 2 K ES 25 f Fp i 1 fкр , pp fi2 -1 2 де K ES - фактор вагомості клапана, МН ; Fp - активна площа робочих циліндрів, м ; fi 2 площа прохідного перетину гідролінії, де встановлений регулюючий клапан, м ; fкр - площа 2 критичного прохідного перетину регулюючого клапана, м ; - коефіцієнт якості гідросистеми; p p перепад тисків між акумулятором та робочими циліндрами гідравлічного преса, Мпа. При 30 35 40 45 50 цьому проектування виконують у відповідності до послідовності етапів машинного циклу гідравлічного преса з урахуванням їх безпосереднього взаємозв'язку при деформуванні поковки, а за допомогою фактора вагомості клапана K ES системою автоматичного керування контролюють частку зведеного коефіцієнта гідравлічного опору регулюючого клапана, що приходиться на одиницю зусилля гідравлічного преса. Приклад здійснення способу. Приклад здійснення способу проектування швидкодіючих систем керування гідравлічними пресами пояснюється кресленням, на якому зображена діаграма залежності фактора вагомості клапана K ES від зусилля преса Pp при роботі на І (круглі маркери) та II (квадратні маркери) ступенях зусиль при різних значеннях коефіцієнта якості гідросистеми (0,5; 0,6; 0,7; 0,8; 0,9; 0,99). Дані наведені для ковальських гідравлічних пресів з насосно-акумуляторним приводом ряду зусиль в діапазоні 30…150 МН. Створити швидкодіючу систему керування гідравлічним пресом можна наступним чином (відповідно до даних діаграми фіг. 1). 1. Задаються необхідним значенням коефіцієнта якості гідросистеми а, якому відповідає крива діаграми із умови можливості його практичної реалізації в спроектованій системі керування, виходячи із умов та вимог виробництва. 2. Проектування виконують у відповідності до послідовності етапів машинного циклу гідравлічного преса з урахуванням їх безпосереднього взаємозв'язку при деформуванні поковки, відповідно до графіку технологічного навантаження. 3. Параметри та елементи гідроліній системи керування вибирають за допомогою діаграми залежності фактора вагомості клапана K ES від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми із застосуванням залежності 2 UA 118084 U 2 K ES f Fp i 1 fкр , 2 pp fi -1 2 де K ES - фактор вагомості клапана, МН ; Fp - активна площа робочих циліндрів, м ; fi 2 площа прохідного перетину гідролінії, де встановлений регулюючий клапан, м ; fкр - площа 2 5 10 критичного прохідного перетину регулюючого клапана, м ; - коефіцієнт якості гідросистеми; p p перепад тисків між акумулятором та робочими циліндрами гідравлічного преса,Мпа. 4. За допомогою фактора вагомості клапана K ES контролюють частку зведеного коефіцієнта гідравлічного опору регулюючого клапана, що приходиться на одиницю зусилля гідравлічного преса. За значенням зусилля преса (МН) знаходять перетин з кривою діаграми вибраного значення коефіцієнта та визначають фактор вагомості клапана K ES . Проектують систему керування гідравлічним пресом, знаходячи наступні параметри за даними діаграми: - зведений коефіцієнт опору регулюючого клапана кл - фактор вагомості клапана K ES перемножують на зусилля преса Pn ; - загальний коефіцієнт опору магістралі м , де встановлено клапан - зведений коефіцієнт опору регулюючого клапана кл ділять на вибране значення коефіцієнта ; 15 20 25 30 - зведений коефіцієнт опору арматури магістралі арм - різниця між м та кл . 5. Виготовляють систему керування гідравлічним пресом в металі. 6. Здійснюють монтаж системи керування гідравлічним пресом. 7. Проводять випробування системи керування та здають її в експлуатацію. 8. Відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший. Таким чином, до втілення системи керування в металі можна точно визначити необхідні параметри регулюючого клапана та гідравлічної системи керування, а також досягти її необхідні швидкісні параметри. Наведений приклад підтверджує досягнення технічного результату - а саме: підвищення ефективності роботи гідравлічних пресів, їх швидкодії та якості керування. Джерела інформації: 1. Шинкаренко О.М., Корнеева Т.С., Корчак Е.С. Построение профиля образующей конического отверстия седла клапана// Удосконалення процесів і обладнання обробки тиском в металургії і машинобудуванні: Тем.зб.наук. пр. - ДДМА: Краматорськ, 2002. - С. 552-555. 2. Cold and hot forging: fundamentals and applications / Taylan Altan, Gracious Ngaile, Gangshu Shen. - ASM International, 2004. - 334 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми , обробленні поковки відповідно до графіку технологічного навантаження для конкретного процесу обробки тиском, її деформуванні послідовними натисканнями при роботі преса на відповідному ступені зусиль відкриттям регулюючих клапанів робочих циліндрів, який відрізняється тим, що відкриття регулюючих клапанів відповідного ступеня зусиль здійснюють системою автоматичного керування із умови відсутності гідравлічних ударів при переключенні гідравлічного преса з одного режиму роботи на інший, базове значення коефіцієнта якості гідросистеми визначають із умови можливості його практичної реалізації в спроектованій системі керування, параметри та елементи гідроліній системи керування вибирають за допомогою діаграми залежності фактора вагомості клапана від зусилля преса у відповідності до значення вибраного коефіцієнта якості гідросистеми із застосуванням залежності 2 K ES f Fp i 1 fкр , pp fi2 3 UA 118084 U -1 2 де K ES - фактор вагомості клапана, МН ; Fp - активна площа робочих циліндрів, м ; fi - площа 2 прохідного перетину гідролінії, де встановлений регулюючий клапан, м ; fкр - площа критичного 2 прохідного перетину регулюючого клапана, м ; - коефіцієнт якості гідросистеми; p p 5 перепад тисків між акумулятором та робочими циліндрами гідравлічного преса, МПа, при цьому проектування виконують у відповідності до послідовності етапів машинного циклу гідравлічного преса з урахуванням їх безпосереднього взаємозв'язку при деформуванні поковки, а за допомогою фактора вагомості клапана K ES системою автоматичного керування контролюють частку зведеного коефіцієнта гідравлічного опору регулюючого клапана, що приходиться на одиницю зусилля гідравлічного преса. Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B30B 15/00
Мітки: керування, проектування, систем, гідравлічними, швидкодіючих, спосіб, пресами
Код посилання
<a href="https://ua.patents.su/6-118084-sposib-proektuvannya-shvidkodiyuchikh-sistem-keruvannya-gidravlichnimi-presami.html" target="_blank" rel="follow" title="База патентів України">Спосіб проектування швидкодіючих систем керування гідравлічними пресами</a>
Спосіб проектування швидкодіючих систем керування гідравлічними пресами
Номер патенту: 105610
Опубліковано: 25.03.2016
Автор: Корчак Олена Сергіївна
МПК: B30B 15/00, F16K 17/00
Мітки: керування, гідравлічними, пресами, спосіб, швидкодіючих, проектування, систем
Формула / Реферат:
Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні відповідних параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми a, на базі якого проектується система керування гідравлічним пресом, виготовляється в металі, здійснюється її монтаж та випробування, який відрізняється тим, що параметри гідроліній системи керування визначаються за допомогою діаграми залежності...
Спосіб проектування швидкодіючих систем керування гідравлічними пресами
Номер патенту: 107951
Опубліковано: 24.06.2016
Автор: Корчак Олена Сергіївна
МПК: F16K 17/00, B30B 15/00
Мітки: керування, проектування, спосіб, пресами, систем, швидкодіючих, гідравлічними
Формула / Реферат:
Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні відповідних параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми a, на базі якого проектують систему керування гідравлічним пресом, виготовляють в металі, здійснюють її монтаж та випробування, який відрізняється тим, що зменшують приведені до рухомої поперечини маси на ділянці гідроприводу "напірний...
Спосіб створення систем керування гідравлічними пресами з необхідними швидкісними параметрами
Номер патенту: 69050
Опубліковано: 25.04.2012
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович
МПК: F16K 17/00
Мітки: спосіб, керування, систем, швидкісними, пресами, гідравлічними, необхідними, параметрами, створення
Формула / Реферат:
Спосіб створення систем керування гідравлічними пресами з необхідними швидкісними параметрами, згідно з яким теоретично визначають відповідні параметри гідравлічної системи, на їх базі проектують систему керування гідравлічним пресом, виготовляють її в металі, здійснюють монтаж та випробування, який відрізняється тим, що на етапі проектування системи керування гідробалони акумулятора максимально наближають до преса, магістраль...
Спосіб проектування швидкодіючих систем низького тиску гідравлічних пресів
Номер патенту: 116045
Опубліковано: 10.05.2017
Автор: Корчак Олена Сергіївна
МПК: B30B 15/16, B30B 15/00
Мітки: проектування, тиску, гідравлічних, швидкодіючих, спосіб, низького, систем, пресів
Формула / Реферат:
Спосіб проектування швидкодіючих систем низького тиску гідравлічних пресів, який полягає у тому, що максимально наближують бак наповнення до преса, розвантажують магістраль "бак наповнення - робочі циліндри" від зайвих гідравлічних опорів, зосереджують основну частку загального опору цієї магістралі на клапанах наповнення, з якими з'єднують трубопровід наповнення, який відрізняється тим, що трубопровід наповнення з'єднують з...
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту
Номер патенту: 49923
Опубліковано: 11.05.2010
Автор: Сендецький Микола Миколайович
МПК: G05B 15/00, G06F 5/00, G06F 7/00
Мітки: складних, систем, засобів, автоматизований, транспорту, технічних, комплекс, залізничного, проектування
Формула / Реферат:
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту, що містить командний блок постановки завдань і керування процесом формування об'єкта, систему обґрунтування рівня якості створюваного об'єкта, систему формування виду перспективного складного об'єкта, центральну систему введення даних, підсистему вибору оптимального варіанта техніко-економічних вимог та тактико-технічних вимог і...
Попередній патент: Спосіб кування заготівок з нерівномірним температурним полем
Наступний патент: Спосіб роботи зливної системи гідравлічного преса
Випадковий патент: Спосіб двоконтурного поточного шифрування