Багатопараметровий протиюзний датчик
Номер патенту: 121614
Опубліковано: 11.12.2017
Автори: Ковтанець Максим Володимирович, Могила Валентин Іванович, Смірний Михайло Федорович, Горбунов Микола Іванович
Формула / Реферат
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі, пружний елемент, який відрізняється тим, що на інерційних вантажах закріплено постійні стрижневі магніти на одній прямій, застосовано перший-третій диференційні ферозонди, перший з яких розташовано вздовж осі N-S постійного стрижневого магніту, закріпленого на інерційному вантажі, насадженому на вісь датчика, другий та третій диференційні ферозонди розміщено перпендикулярно до площини постійних стрижневих магнітів на перетинанні осі N-S та магнітної нейтралі n-n при нерухомій осі датчика, вихід першого диференційного ферозонда підключено до першого входу елемента I, вихід якого сполучено з керуючим входом аналого-цифрового перетворювача, а другий вхід - через елемент НІ з другим диференційним ферозондом, третій диференційний ферозонд підключено до інформаційного входу аналого-цифрового перетворювача, вихід якого зв'язано з обчислювальним блоком, причому частотомір з'єднано з виходом елемента НІ.
Текст
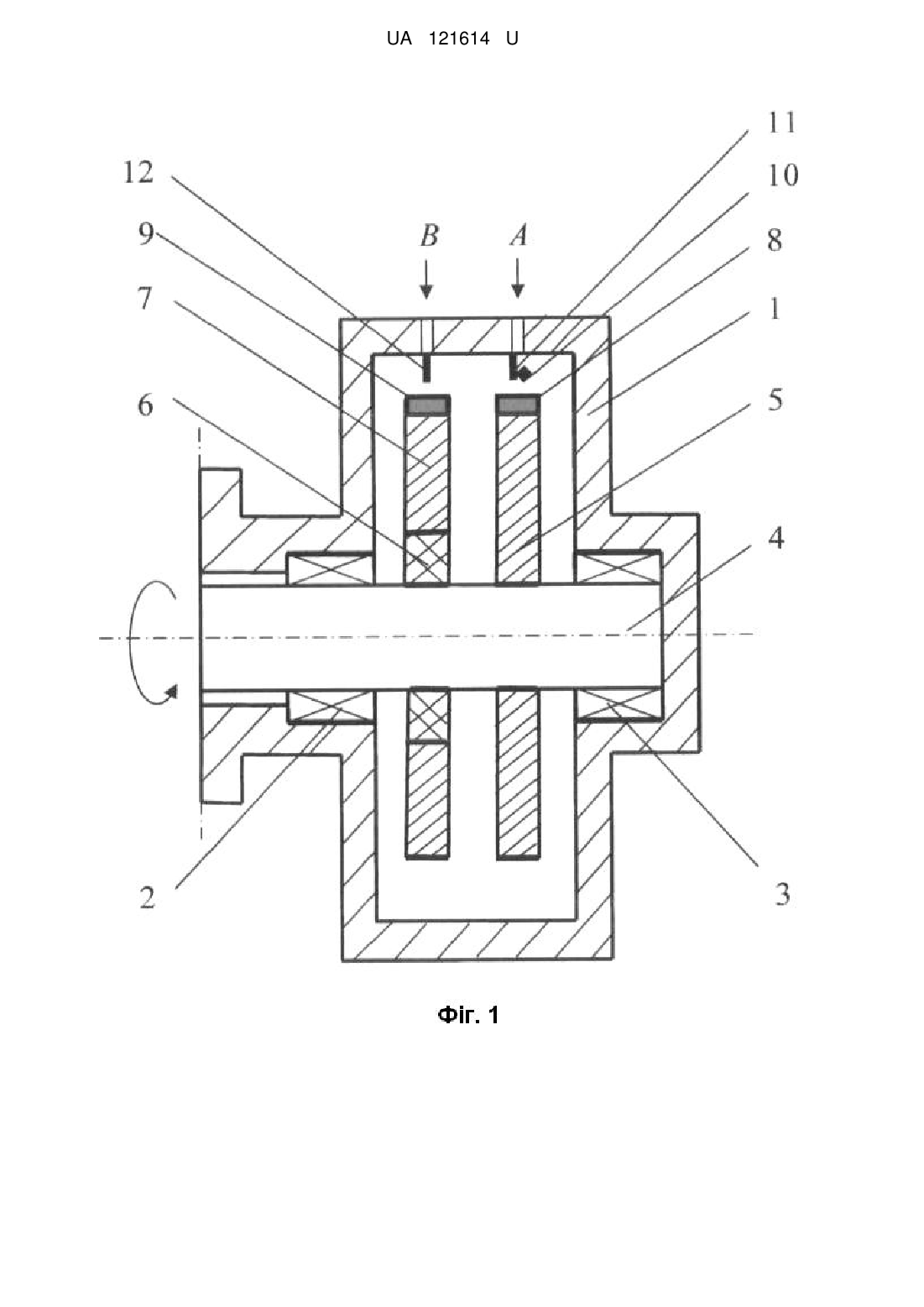
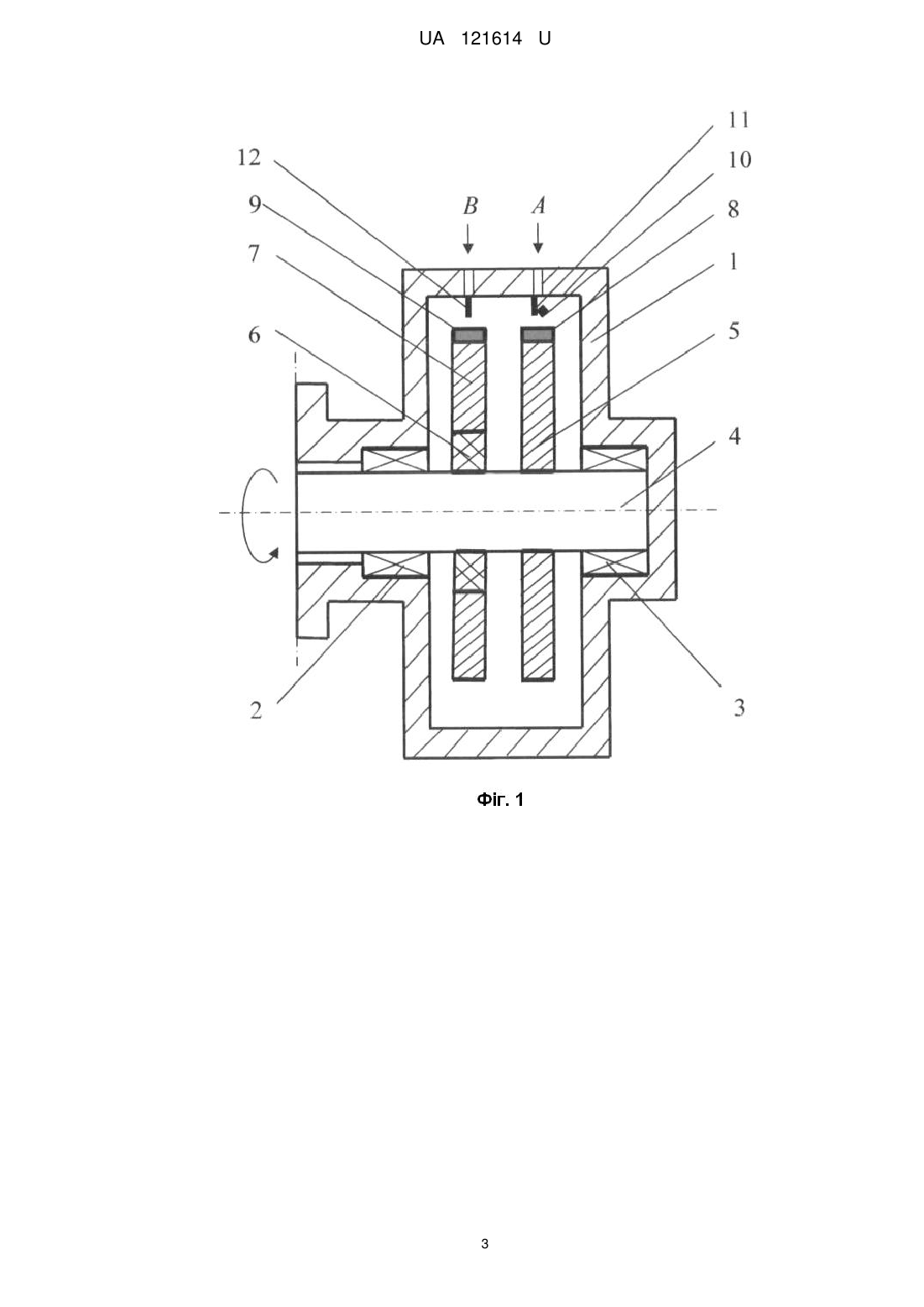
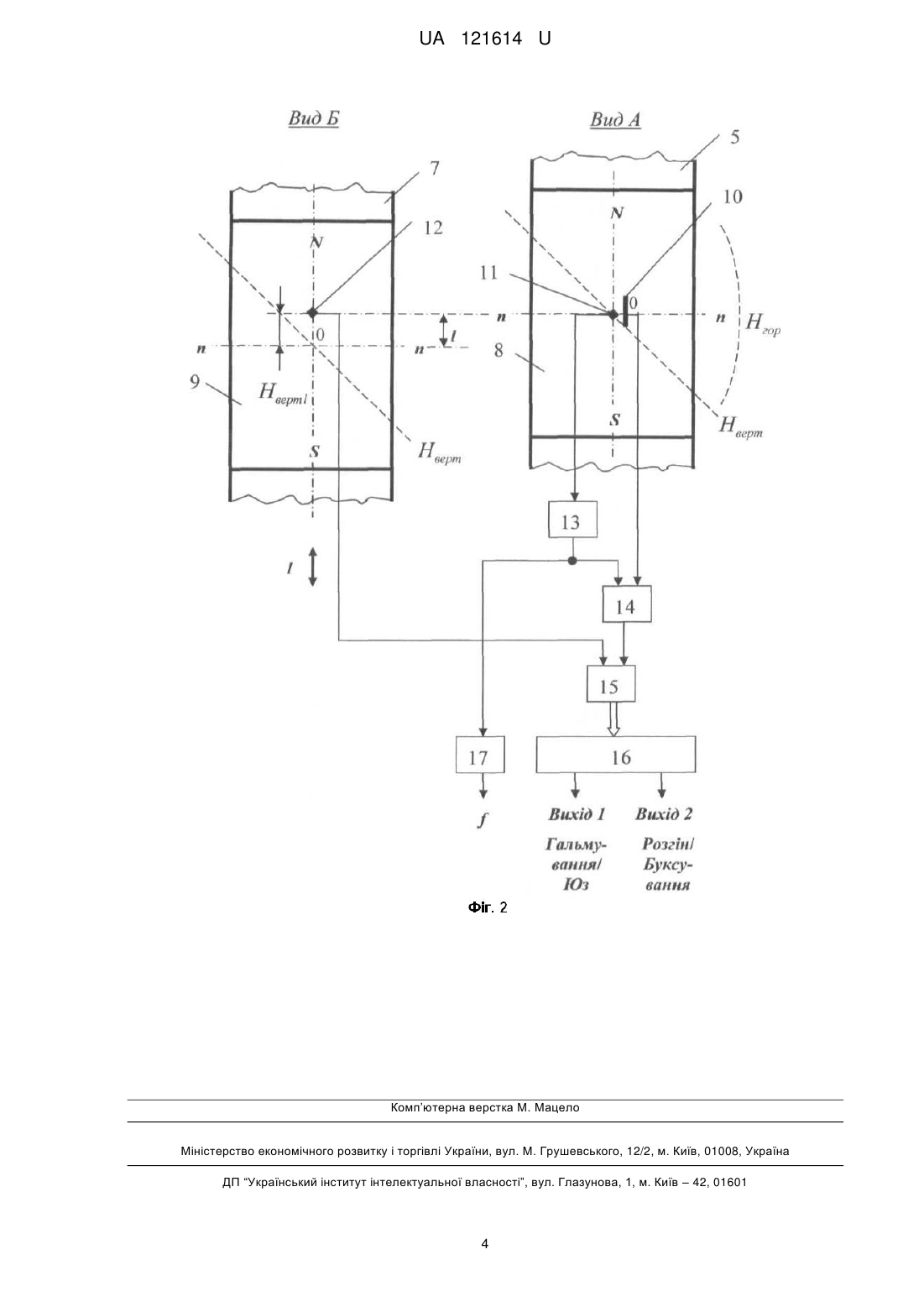
Реферат: Багатопараметровий протиюзний датчик містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі, пружний елемент. На інерційних вантажах закріплено постійні стрижневі магніти на одній прямій, застосовано перший-третій диференційні ферозонди. Перший ферозонд розташовано вздовж осі N-S постійного стрижневого магніту, закріпленого на інерційному вантажі, насадженому на вісь датчика. Другий та третій диференційні ферозонди розміщено перпендикулярно до площини постійних стрижневих магнітів на перетинанні осі N-S та магнітної нейтралі n-n при нерухомій осі датчика. Вихід першого диференційного ферозонда підключено до першого входу елемента I, вихід якого сполучено з керуючим входом аналого-цифрового перетворювача. Другий вхід через елемент НІ з другим диференційним ферозондом. Третій диференційний ферозонд підключено до інформаційного входу аналого-цифрового перетворювача, вихід якого зв'язано з обчислювальним блоком. Частотомір з'єднано з виходом елемента НІ. UA 121614 U (54) БАГАТОПАРАМЕТРОВИЙ ПРОТИЮЗНИЙ ДАТЧИК UA 121614 U UA 121614 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до залізничного транспорту, а саме до гальмового, протиюзного та протибуксувального обладнання одиниць транспортного складу. Відомим аналогом є протигазний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано інерційний вантаж, положення якого фіксується механізмом із трьох кульок, розташованих у профільованих вирізах шайби, що розтискається пружиною корпуса штовхача з електричним контактним вмикачем, як інерційний вантаж застосовано два інерційні вантажі з радіально розташованими вікнами, як механізм застосовано пружний елемент і як електричний контактний вмикач застосовано безконтактний вмикач [див. патент України № 62169, В60Т 8/86, опубл. 15.12.2003, бюл. № 12]. Цей датчик вибрано за прототип. Недоліком аналога є те, що наявний безконтактний вмикач не забезпечує вироблення більш інформативного сигналу керування, достатню точність та надійність роботи датчика. В основу корисної моделі поставлена задача вдосконалення багатопараметрового протиюзного датчика шляхом того, що на інерційних вантажах закріплено постійні стрижневі магніти на одній прямій, застосовано перший-третій диференційні ферозонди, перший з яких розташовано вздовж осі N-S постійного стрижневого магніту, закріпленого на інерційному вантажі, насадженому на вісь датчика, другий та третій диференційні ферозонди розміщено перпендикулярно до площини постійних стрижневих магнітів на перетинанні осі N-S та магнітної нейтралі n-n при нерухомій осі датчика, вихід першого диференційного ферозонда підключено до першого входу елемента І, вихід якого сполучено з керуючим входом аналого-цифрового перетворювача, а другий вхід - через елемент НІ з другим диференційним ферозондом, третій диференційний ферозонд підключено до інформаційного входу аналого-цифрового перетворювача, вихід якого зв'язано з обчислювальним блоком, причому частотомір з'єднано з виходом елемента НІ. Це дозволить отримати більш інформативний корисний сигналу, який забезпечить аналізувати режими гальмування, юзу, розгону та буксування транспортного засобу що розширить функціональні можливості датчика та підвищить надійність його роботи. Поставлена задача вирішується тим, що у багатопараметровому протиюзному датчику, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі, пружний елемент, згідно з корисною моделлю, на інерційних вантажах закріплено постійні стрижневі магніти на одній прямій, застосовано перший-третій диференційні ферозонди, перший з яких розташовано вздовж осі N-S постійного стрижневого магніту, закріпленого на інерційному вантажі, насадженому на вісь датчика, другий та третій диференційні ферозонди розміщено перпендикулярно до площини постійних стрижневих магнітів на перетинанні осі N-S та магнітної нейтралі n-n при нерухомій осі датчика, вихід першого диференційного ферозонда підключено до першого входу елемента І, вихід якого сполучено з керуючим входом аналого-цифрового перетворювача, а другий вхід - через елемент НІ з другим диференційним ферозондом, третій диференційний ферозонд підключено до інформаційного входу аналого-цифрового перетворювача, вихід якого зв'язано з обчислювальним блоком, причому частотомір з'єднано з виходом елемента НІ. Корисна модель пояснюється кресленнями (фіг. 1, 2), де зображено багатопараметровий протиюзний датчик, що містить корпус 1 зі вставленою в нього у підшипниках 2, 3 віссю 4, на яку насаджено інерційний вантаж 5 та через пружний елемент 6 інерційний вантаж 7, постійні стрижневі магніти 8, 9, перший-третій диференційні ферозонди 10-12, елемент НІ 13, елемент І 14, аналого-цифровий перетворювач 15, обчислювальний блок 16 та частотомір 17. Корисна модель працює наступним чином. У режимі стаціонарної швидкості інерційні вантажі 5, 7 обертаються синхронно. Під час переміщення постійних стрижневих магнітів 8, 9 відносно першого-третього диференційних ферозондів 10-12 на виході першого 10 диференційного ферозонда з'являється сигнал Нгор, який дозволяє передачу по другому входу елемента І 14 коротких імпульсів, які формуються на виході елемента HI 13, на вхід якого подається нульовий сигнал з другого 11 диференційного ферозонда, який зчитує вертикальну складову напруженості магнітного поля Нверт., у момент знаходження його на магнітній нейтралі n-n постійного стрижневого магніту 8 (фіг. 2). У результаті цього на виході елемента І 14 виділяються короткі імпульси з частотою f обертання осі 4, які подаються на керуючий вхід аналого-цифрового перетворювача 15 та частотомір 17. У цей же момент сигнал на виході третього 12 диференційного ферозонда відсутній. Під час руху транспортного засобу при гальмуванні та при появі умов для переходу коліс до юзу інерційний вантаж 7 за допомогою пружного елемента 6 унаслідок інерції повертається відносно інерційного вантажу 5, випереджаючи його на відповідний кут. При цьому постійний стрижневий магніт 9 разом з інерційним вантажем 7 закручується по колу на відстань l відносно постійного стрижневого магніту 8 (фіг. 2). Водночас на виході третього 12 диференційного 1 UA 121614 U 5 10 15 20 25 ферозонда, який зчитує вертикальну складову напруженості магнітного поля Нверт., виникає пропорційний зміщенню l сигнал Нверт.l, який надходить на інформаційний вхід аналогоцифрового перетворювача 15 і далі в обчислювальний блок 16, з виходу Вихід 1 якого видається сигнал Гальмування/Юз (у залежності від його величини) (фіг. 2). Під час руху транспортного засобу при розгоні та при появі умов для переходу коліс до буксування інерційний вантаж 7 за допомогою пружного елемента 6 унаслідок інерції повертається відносно інерційного вантажу 5, відстаючи від нього на відповідний кут. У цьому випадку на виході третього 12 диференційного ферозонда виникає пропорційний зміщенню l сигнал Нверт.l, який надходить на інформаційний вхід аналого-цифрового перетворювача 15 і далі в обчислювальний блок 16, з виходу Вихід 2 якого видається сигнал Розгін/Буксування (у залежності від його величини) (фіг. 2). Корисна модель забезпечує розширення функціональних можливостей датчика та підвищує надійність його роботи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі, пружний елемент, який відрізняється тим, що на інерційних вантажах закріплено постійні стрижневі магніти на одній прямій, застосовано перший-третій диференційні ферозонди, перший з яких розташовано вздовж осі N-S постійного стрижневого магніту, закріпленого на інерційному вантажі, насадженому на вісь датчика, другий та третій диференційні ферозонди розміщено перпендикулярно до площини постійних стрижневих магнітів на перетинанні осі N-S та магнітної нейтралі n-n при нерухомій осі датчика, вихід першого диференційного ферозонда підключено до першого входу елемента I, вихід якого сполучено з керуючим входом аналогоцифрового перетворювача, а другий вхід - через елемент НІ з другим диференційним ферозондом, третій диференційний ферозонд підключено до інформаційного входу аналогоцифрового перетворювача, вихід якого зв'язано з обчислювальним блоком, причому частотомір з'єднано з виходом елемента НІ. 2 UA 121614 U 3 UA 121614 U Комп’ютерна верстка М. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60T 8/86
Мітки: датчик, протиюзний, багатопараметровий
Код посилання
<a href="https://ua.patents.su/6-121614-bagatoparametrovijj-protiyuznijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Багатопараметровий протиюзний датчик</a>
Багатопараметровий протиюзний датчик

Номер патенту: 107227
Опубліковано: 25.05.2016
Автори: Горбунов Микола Іванович, Могила Валентин Іванович, Смірний Михайло Федорович
МПК: H03K 19/00, B60T 8/86
Мітки: протиюзний, багатопараметровий, датчик
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих...
Багатопараметровий протиюзний датчик
Номер патенту: 120241
Опубліковано: 25.10.2017
Автори: Смірний Михайло Федорович, Могила Валентин Іванович, Ковтанець Максим Володимирович, Горбунов Микола Іванович
МПК: B60T 8/86
Мітки: протиюзний, датчик, багатопараметровий
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано першу та другу пари струмовихрових перетворювачів, закріплених на корпусі у...
Багатопараметровий протиюзний датчик
Номер патенту: 120249
Опубліковано: 25.10.2017
Автори: Могила Валентин Іванович, Ковтанець Максим Володимирович, Смірний Михайло Федорович, Горбунов Микола Іванович
МПК: B60T 8/86
Мітки: датчик, протиюзний, багатопараметровий
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що перший інерційний вантаж виконано у вигляді втулки, пружну вставку закріплено між втулкою та другим інерційним вантажем, в секторних прорізах втулки та другого інерційного вантажу...
Багатопараметровий протиюзний датчик
Номер патенту: 107229
Опубліковано: 25.05.2016
Автори: Смірний Михайло Федорович, Горбунов Микола Іванович, Могила Валентин Іванович
МПК: B60T 8/86
Мітки: багатопараметровий, протиюзний, датчик
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано два струмовихрові перетворювачі, закріплені на корпусі у площині металевих...
Датчик переміщень
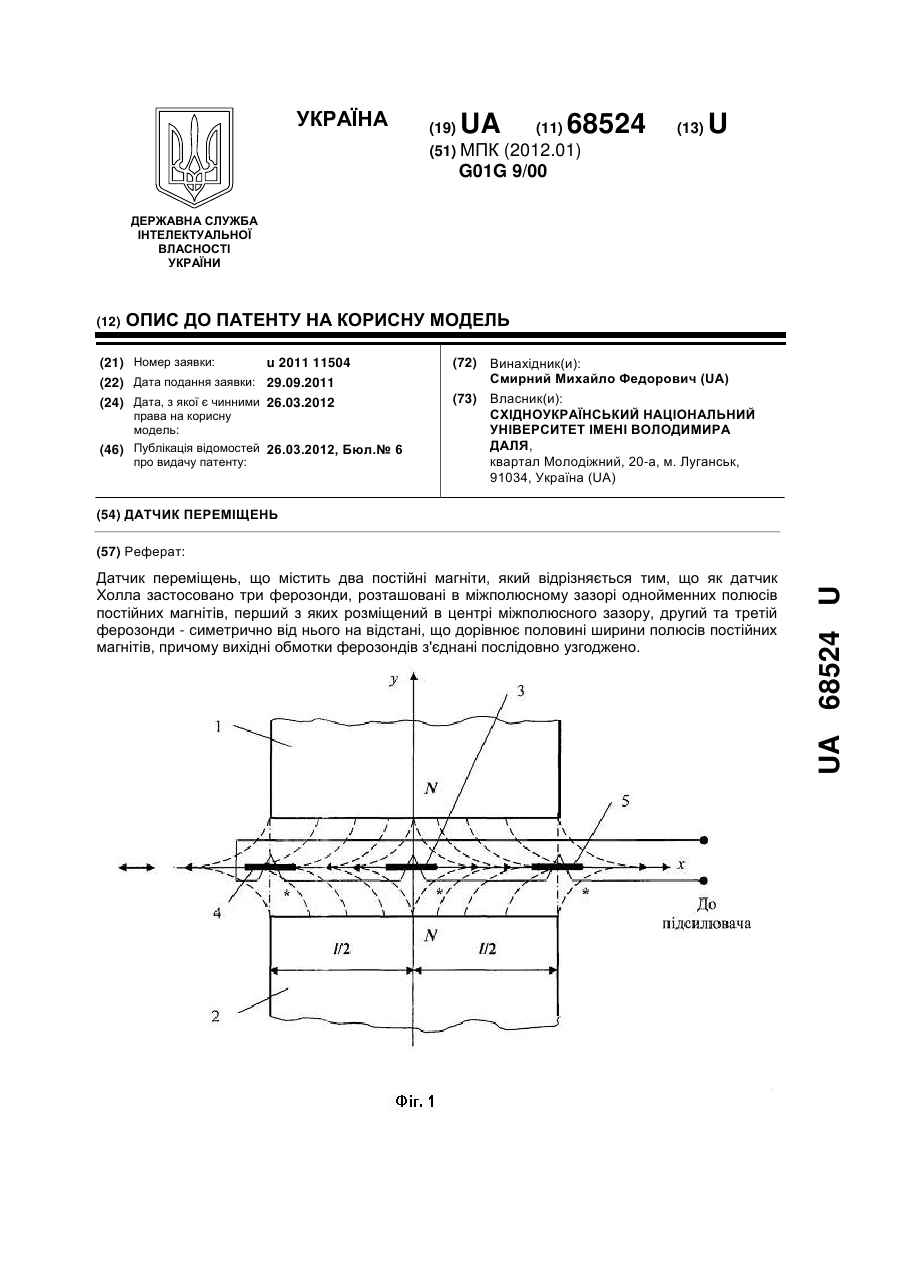
Номер патенту: 68524
Опубліковано: 26.03.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, переміщень
Формула / Реферат:
Датчик переміщень, що містить два постійні магніти, який відрізняється тим, що як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі однойменних полюсів постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює половині ширини полюсів постійних магнітів, причому вихідні обмотки ферозондів з'єднані послідовно узгоджено.
Попередній патент: Спосіб діагностики розвитку атеросклерозу
Наступний патент: Спосіб діагностики розвитку атеросклерозу
Випадковий патент: Будівельний блок