Радіолокатор
Номер патенту: 12905
Опубліковано: 15.03.2006
Автори: Леховицький Давід Ісаакович, Дорощук Валерій Анатолійович, Ященок Володимир Жоржевич


Формула / Реферат
1. Радіолокатор, що містить передавальну антену, послідовно з'єднані приймальну антену, перший змішувач, другий змішувач, підсилювач, пристрій формування лінійно-частотно-модульованих сигналів, вихід якого підключений до передавальної антени і до другого входу першого змішувача, формувач керуючих сигналів, перший вхід якого з'єднаний з входом пристрою формування лінійно-частотно-модульованих сигналів, синтезатор частот, вхід якого підключений до другого входу формувача керуючих сигналів, а вихід - до другого входу другого змішувача, індикатор, перший вхід якого підключений до третього виходу формувача керуючих сигналів, канал розпізнавання в складі послідовно з'єднаних блока керування, першого постійного запам'ятовуючого пристрою, корелятора, порогового пристрою, вихід якого підключений до другого входу індикатора, а другий вхід підключений до другого виходу блока керування, а також оперативного запам'ятовуючого пристрою, перший вихід якого підключений до входу блока керування, а другий вихід до другого входу корелятора, який відрізняється тим, що введено пристрій цифрової обробки, причому, його перший вхід підключений до виходу підсилювача, другий вхід - до третього виходу формувача керуючих сигналів, а вихід - до входу оперативного запам'ятовуючого пристрою, який є входом каналу розпізнавання, і - до третього входу індикатора.
2. Радіолокатор за п. 1, який відрізняється тим, що пристрій цифрової обробки має послідовно з'єднані аналого-цифровий перетворювач, вхід якого з'єднаний з виходом підсилювача пристрою формування спектральних функцій на базі адаптивного решітчастого фільтра, розв'язувального пристрою, вихід якого з'єднаний з входом оперативного запам'ятовуючого пристрою і є виходом пристрою цифрової обробки, другого постійного запам'ятовуючого пристрою, виходи якого підключені до входів пристрою формування спектральних функцій на базі адаптивного решітчастого фільтра, а вхід - до третього виходу формувача керуючих сигналів.
Текст
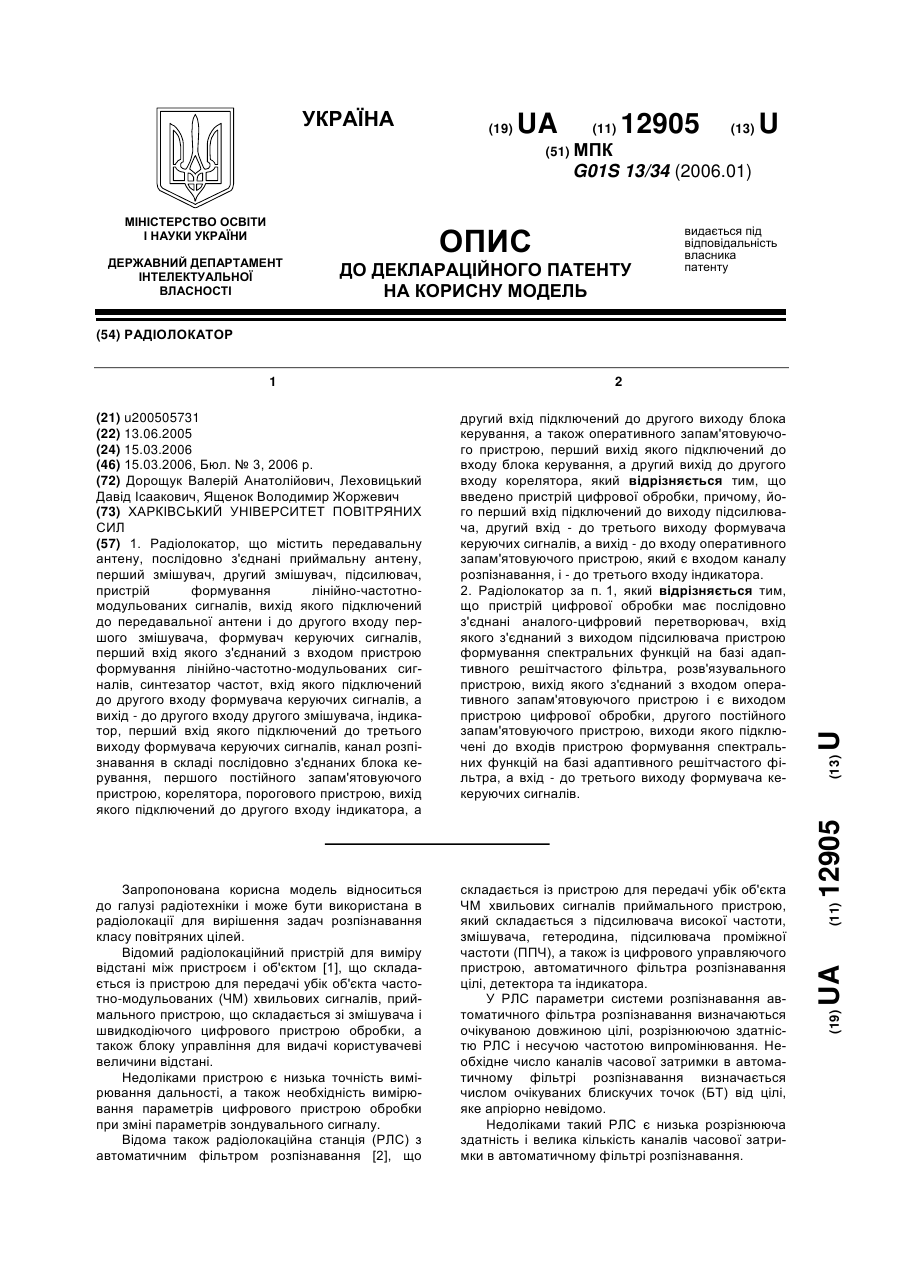
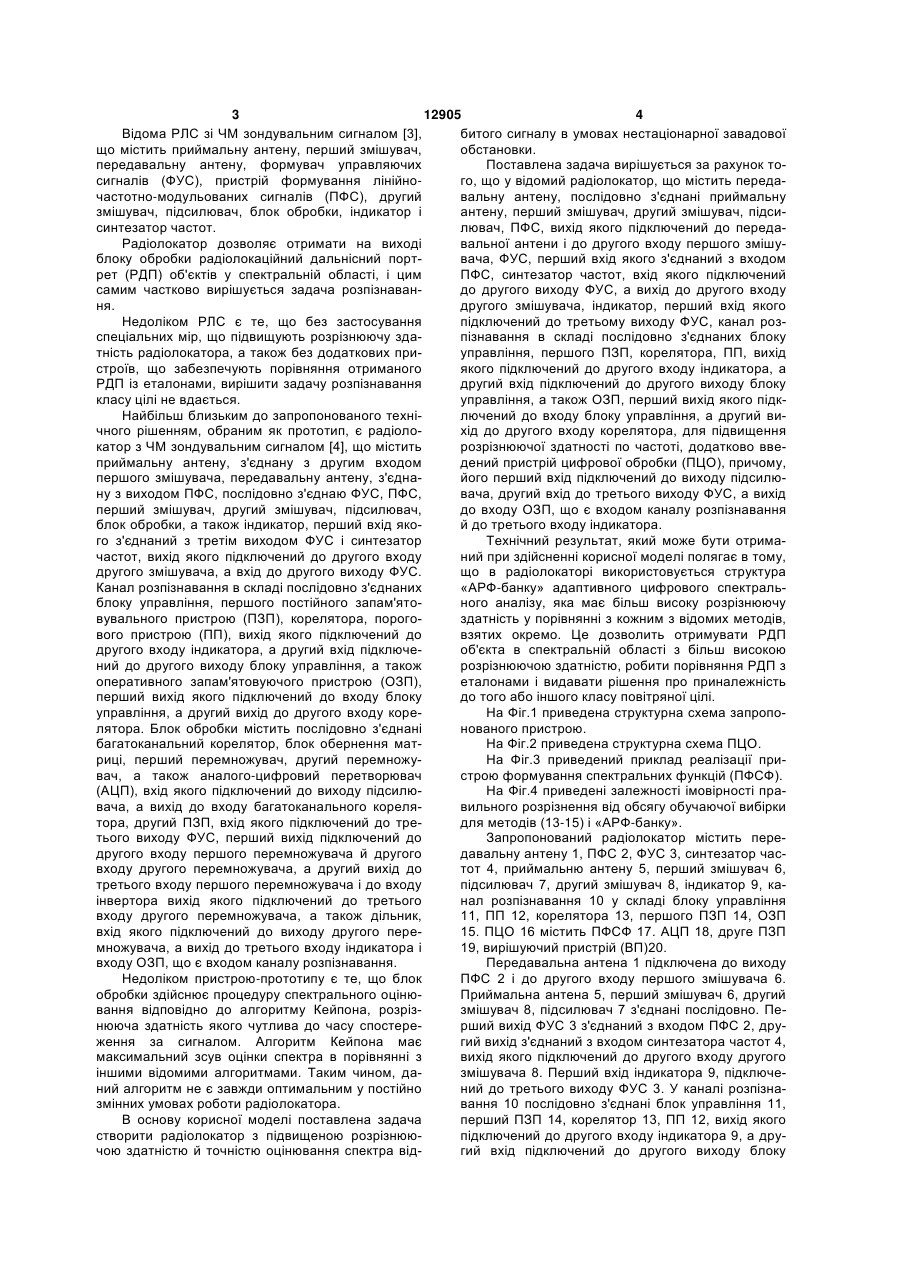
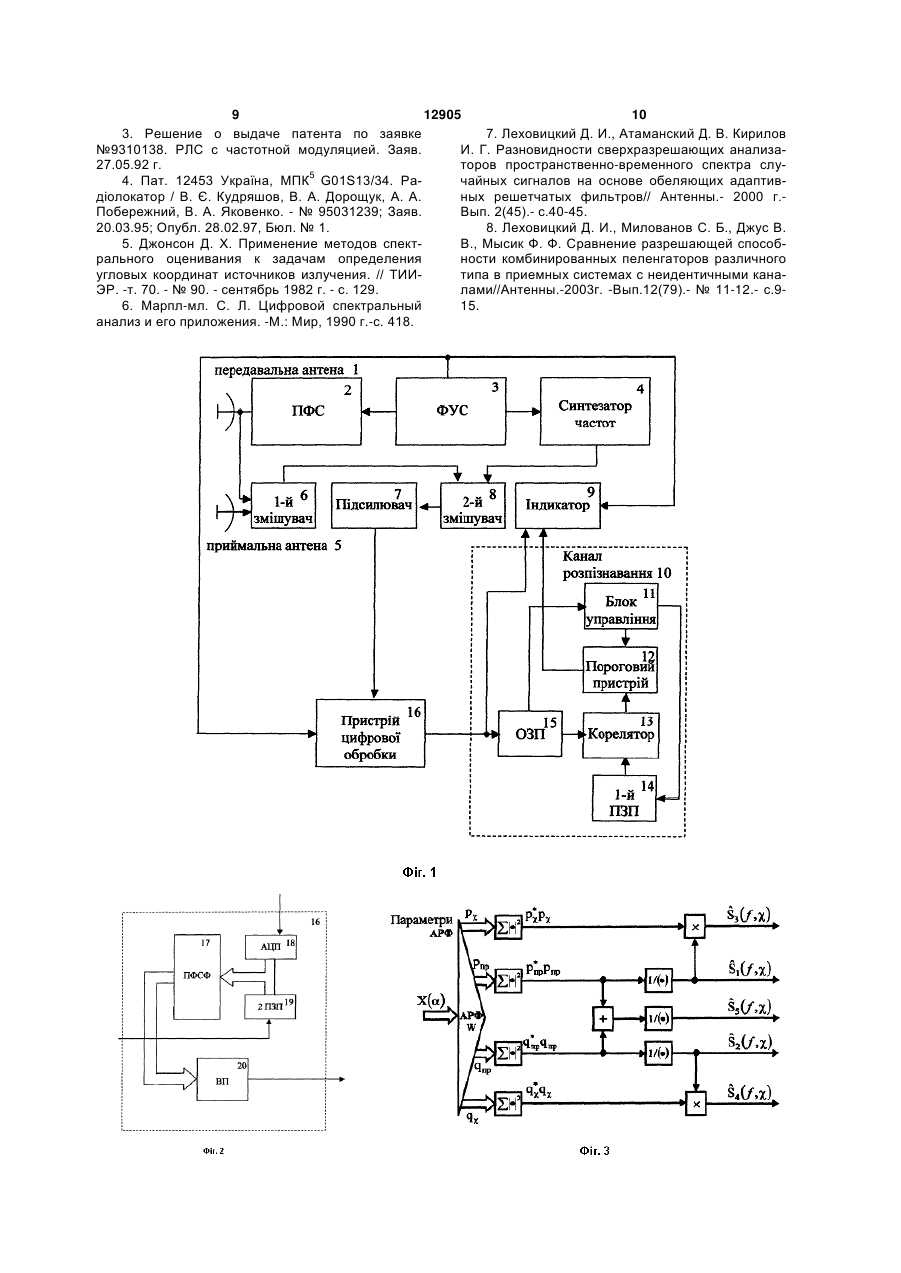
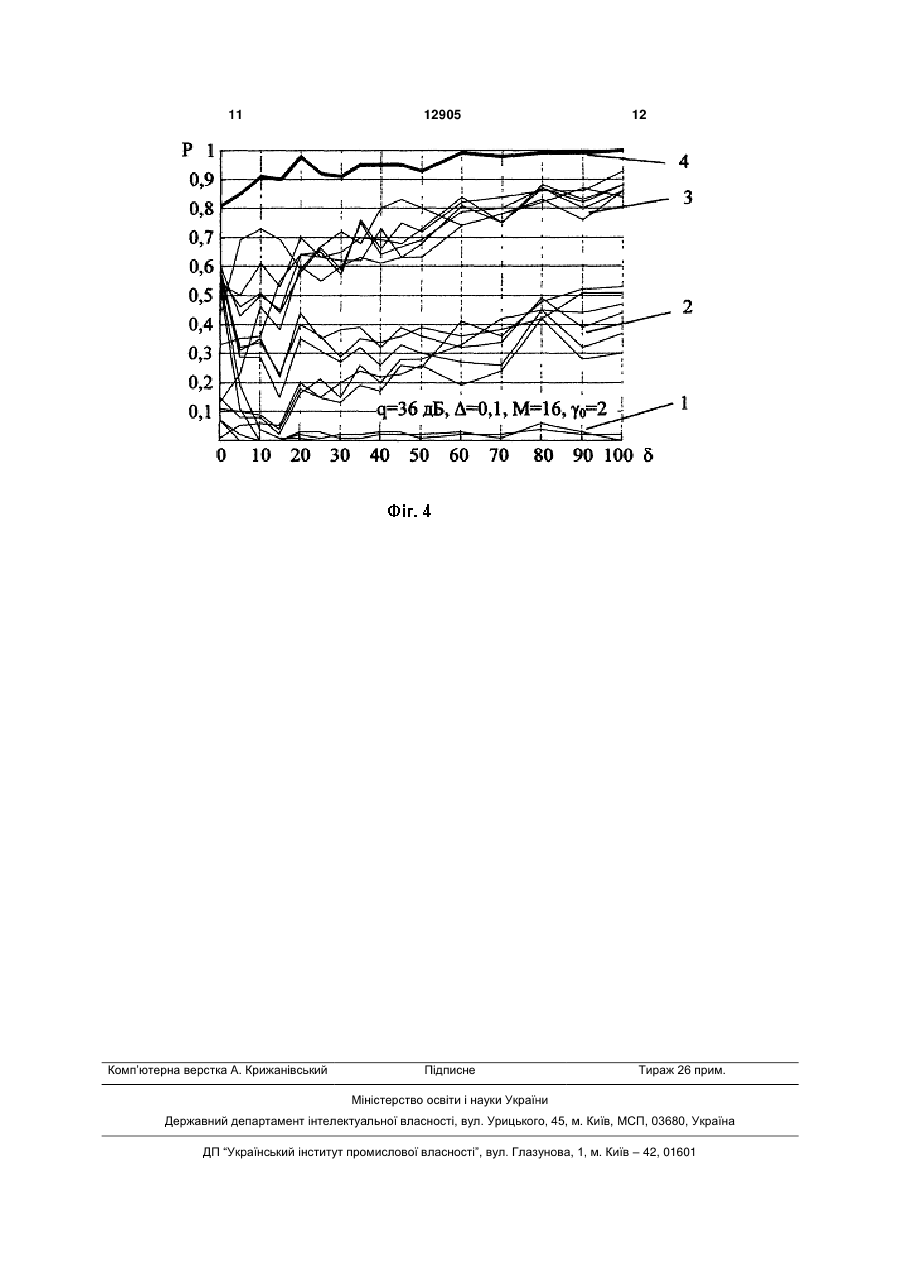
1. Радіолокатор, що містить передавальну антену, послідовно з'єднані приймальну антену, перший змішувач, другий змішувач, підсилювач, пристрій формування лінійно-частотномодульованих сигналів, вихід якого підключений до передавальної антени і до другого входу першого змішувача, формувач керуючих сигналів, перший вхід якого з'єднаний з входом пристрою формування лінійно-частотно-модульованих сигналів, синтезатор частот, вхід якого підключений до другого входу формувача керуючих сигналів, а вихід - до другого входу другого змішувача, індикатор, перший вхід якого підключений до третього виходу формувача керуючих сигналів, канал розпізнавання в складі послідовно з'єднаних блока керування, першого постійного запам'ятовуючого пристрою, корелятора, порогового пристрою, вихід якого підключений до другого входу індикатора, а U 2 (19) 1 3 12905 4 Відома РЛС зі ЧМ зондувальним сигналом [3], битого сигналу в умовах нестаціонарної завадової що містить приймальну антену, перший змішувач, обстановки. передавальну антену, формувач управляючих Поставлена задача вирішується за рахунок тосигналів (ФУС), пристрій формування лінійного, що у відомий радіолокатор, що містить передачастотно-модульованих сигналів (ПФС), другий вальну антену, послідовно з'єднані приймальну змішувач, підсилювач, блок обробки, індикатор і антену, перший змішувач, другий змішувач, підсисинтезатор частот. лювач, ПФС, вихід якого підключений до передаРадіолокатор дозволяє отримати на виході вальної антени і до другого входу першого змішублоку обробки радіолокаційний дальнісний портвача, ФУС, перший вхід якого з'єднаний з входом рет (РДП) об'єктів у спектральній області, і цим ПФС, синтезатор частот, вхід якого підключений самим частково вирішується задача розпізнавандо другого виходу ФУС, а вихід до другого входу ня. другого змішувача, індикатор, перший вхід якого Недоліком РЛС є те, що без застосування підключений до третьому виходу ФУС, канал розспеціальних мір, що підвищують розрізнюючу здапізнавання в складі послідовно з'єднаних блоку тність радіолокатора, а також без додаткових приуправління, першого ПЗП, корелятора, ПП, вихід строїв, що забезпечують порівняння отриманого якого підключений до другого входу індикатора, а РДП із еталонами, вирішити задачу розпізнавання другий вхід підключений до другого виходу блоку класу цілі не вдається. управління, а також ОЗП, перший вихід якого підкНайбільш близьким до запропонованого технілючений до входу блоку управління, а другий вичного рішенням, обраним як прототип, є радіолохід до другого входу корелятора, для підвищення катор з ЧМ зондувальним сигналом [4], що містить розрізнюючої здатності по частоті, додатково ввеприймальну антену, з'єднану з другим входом дений пристрій цифрової обробки (ПЦО), причому, першого змішувача, передавальну антену, з'єднайого перший вхід підключений до виходу підсилюну з виходом ПФС, послідовно з'єднаю ФУС, ПФС, вача, другий вхід до третього виходу ФУС, а вихід перший змішувач, другий змішувач, підсилювач, до входу ОЗП, що є входом каналу розпізнавання блок обробки, а також індикатор, перший вхід якой до третього входу індикатора. го з'єднаний з третім виходом ФУС і синтезатор Технічний результат, який може бути отримачастот, вихід якого підключений до другого входу ний при здійсненні корисної моделі полягає в тому, другого змішувача, а вхід до другого виходу ФУС. що в радіолокаторі використовується структура Канал розпізнавання в складі послідовно з'єднаних «АРФ-банку» адаптивного цифрового спектральблоку управління, першого постійного запам'ятоного аналізу, яка має більш високу розрізнюючу вувального пристрою (ПЗП), корелятора, порогоздатність у порівнянні з кожним з відомих методів, вого пристрою (ПП), вихід якого підключений до взятих окремо. Це дозволить отримувати РДП другого входу індикатора, а другий вхід підключеоб'єкта в спектральній області з більш високою ний до другого виходу блоку управління, а також розрізнюючою здатністю, робити порівняння РДП з оперативного запам'ятовуючого пристрою (ОЗП), еталонами і видавати рішення про приналежність перший вихід якого підключений до входу блоку до того або іншого класу повітряної цілі. управління, а другий вихід до другого входу кореНа Фіг.1 приведена структурна схема запрополятора. Блок обробки містить послідовно з'єднані нованого пристрою. багатоканальний корелятор, блок обернення матНа Фіг.2 приведена структурна схема ПЦО. риці, перший перемножувач, другий перемножуНа Фіг.3 приведений приклад реалізації привач, а також аналого-цифровий перетворювач строю формування спектральних функцій (ПФСФ). (АЦП), вхід якого підключений до виходу підсилюНа Фіг.4 приведені залежності імовірності правача, а вихід до входу багатоканального корелявильного розрізнення від обсягу обучаючої вибірки тора, другий ПЗП, вхід якого підключений до тредля методів (13-15) і «АРФ-банку». тього виходу ФУС, перший вихід підключений до Запропонований радіолокатор містить передругого входу першого перемножувача й другого давальну антену 1, ПФС 2, ФУС 3, синтезатор часвходу другого перемножувача, а другий вихід до тот 4, приймальню антену 5, перший змішувач 6, третього входу першого перемножувача і до входу підсилювач 7, другий змішувач 8, індикатор 9, каінвертора вихід якого підключений до третього нал розпізнавання 10 у складі блоку управління входу другого перемножувача, а також дільник, 11, ПП 12, корелятора 13, першого ПЗП 14, ОЗП вхід якого підключений до виходу другого пере15. ПЦО 16 містить ПФСФ 17. АЦП 18, друге ПЗП множувача, а вихід до третього входу індикатора і 19, вирішуючий пристрій (ВП)20. входу ОЗП, що є входом каналу розпізнавання. Передавальна антена 1 підключена до виходу Недоліком пристрою-прототипу є те, що блок ПФС 2 і до другого входу першого змішувача 6. обробки здійснює процедуру спектрального оцінюПриймальна антена 5, перший змішувач 6, другий вання відповідно до алгоритму Кейпона, розріззмішувач 8, підсилювач 7 з'єднані послідовно. Пенююча здатність якого чутлива до часу спостерерший вихід ФУС 3 з'єднаний з входом ПФС 2, друження за сигналом. Алгоритм Кейпона має гий вихід з'єднаний з входом синтезатора частот 4, максимальний зсув оцінки спектра в порівнянні з вихід якого підключений до другого входу другого іншими відомими алгоритмами. Таким чином, дазмішувача 8. Перший вхід індикатора 9, підключений алгоритм не є завжди оптимальним у постійно ний до третього виходу ФУС 3. У каналі розпізназмінних умовах роботи радіолокатора. вання 10 послідовно з'єднані блок управління 11, В основу корисної моделі поставлена задача перший ПЗП 14, корелятор 13, ПП 12, вихід якого створити радіолокатор з підвищеною розрізнююпідключений до другого входу індикатора 9, а дручою здатністю й точністю оцінювання спектра відгий вхід підключений до другого виходу блоку 5 12905 6 управління 11. Перший вихід ОЗП 15 підключений лою: до входу блоку управління 11, а другий вихід до r fa r1 FБ другого входу корелятора 13. Перший вхід ПЦО 16 c T (2) підключений до виходу підсилювача 7, другий вхід де r1 - відстань до обраної ділянки дальності. до третього виходу ФУС 3, а вихід до входу ОЗП Одночасно змінюється управляючий сигнал, 15 і до третього входу індикатора 9. який надходить з третього виходу ФУС 3 на перПЦО 16 містить послідовно з'єднані АЦП 18, ший вхід індикатора 9. Під дією цього сигналу змівхід якого з'єднаний з виходом підсилювача 7, нюється масштаб розгортки індикатора 9 по дальПФСФ 17, ВП 20, вихід якого з'єднаний із входом ності. ОЗП 15 і є виходом ПЦО 16. Виходи другого ПЗП Відбитий сигнал надходить на приймальну ан19 підключені до входів ПФСФ 17, а вхід до третену 5 і з неї на перший вхід першого змішувача 6. тього виходу ФУС 3. З виходу першого змішувача 6 сигнал різницевої Робота запропонованого пристрою полягає в частоти FБ надходить на перший вхід другого змінаступному. ПФС 2 формує безперервний зондушувача 8, на другий вхід якого надходить сигнал з вальний і перший гетеродинний сигнал. Зондувасинтезатора частот. льний ЛЧМ сигнал з початковою частотою fn і девіТаким чином забезпечується перетворення сиацією частоти fc випромінюється в простір за гналу різницевої частоти на частоту спектрального допомогою передавальної антени 1. Перший гетеаналізу. Перетворений сигнал через підсилювач 7 родинний сигнал, що відрізняється від зондувальподається в ПЦО 16. В ПЦО 16 здійснюється пеного меншим рівнем потужності, подається на друретворення аналогового сигналу в цифрову форгий вхід першого змішувача 6. Девіація частоти му, отримання РДП у спектральній області і визназондувального сигналу і першого гетеродинного чення дальності до об'єкта, що опромінюється, за сигналу визначається по формулі: допомогою індикатора 9. fa c T ПЦО 16 функціонує в такий спосіб. З виходу fc підсилювача 7 сигнал частоти f поступає на АЦП 2 rm (1) 18, де здійснюється перетворення аналогового де fa - ширина смуги спектрального аналізу сигналу в цифрову форму. З виходу АЦП 18 цифблоку обробки; рований сигнал подається на входи ПФСФ 17. с - швидкість світла; Прикладом реалізації ПФСФ 17 може бути струкТ - період модуляції; тура «АРФ-банку». Спектральні функції rm - необхідна дальність однозначного виявˆ f ˆ ряду відомих «несобственноструктуS S f, лення цілі. Девіація частоти, залежно від режиму роботи рных» методів просторово-часового спектрального радіолокатора змінюється при подачі на управляаналізу [5-7] мають вигляд: ючий вхід ПФС 2 відповідного коду першого вихоT0 ˆ S1 f ду ФУС 3. Для перегляду обраної ділянки дально# x f ˆ xf (3) сті використовується другий гетеродинний сигнал, який виробляється синтезатором частот 4, відподе S f - спектральна щільність потужності; відно з кодовим сигналом, що надходить на ˆ - матриця зворотня оціненій автокореляуправляючий вхід з другого виходу ФУС 3, при ційньгй матриці розміром (m+1) (m+1). цьому забезпечується частотний зсув смуги аналізу в ПЦО 16 на величину, яка обумовлена форму Xf exp j2 fT0 .......... ......... .......... ......... exp j2 fT0 вектор комплексни х синусоїд . (4) 2 ˆ S4 f - метод Борджотти-Лагунаса (БЛ); ˆ S2 f ˆ S3 f ˆ S4 f x * ( f ) ˆ x( f ) x * ( f ) ˆ 2 x( f ) , 1, M. ˆ S5 f * mm em ˆ x( f ) mmx * ( f ) , m 1, M. ˆ x( f ) e* ˆ x( f ) m (5) 2 . (6) 1 (7) 1 x * ( f ) ˆ 2 x( f ) , (8) ˆ f (3) - метод «минимальной диспеде СФ S1 рсии (МД)» Кейпона; ˆ S f - метод «линейного предсказания (ЛП)» 2 Берга; ˆ S3 f - різновид «модифицированного алгоритма Кейпона (МАК)»; ˆ S5 f - метод «теплового шума (ТШ)». ˆ Значення СФ S f методів (3, 5, 6) у довільній точці аналізу f з обраного сектора fa (fmin, fmax) очевидним чином можуть бути сформовані шляхом комбінування квадратів модулів елементів векторів M p pm m 1 Hx, (9) M p qm m 1 N * x, (10) на виходах АРФ з імпульсною характеристикою виду: ˆ H ˆ W , ˆ* N (11) 7 12905 ˆ ˆ складеної з оцінок нижніх H і верхньої N * трикутних МхМ матриць-співмножників матриці ˆ в представленнях: 1 (12) H * H NN * , Ф . Алгоритми формування максимально правдоˆ подібних оцінок матриці W (настройки АРФ) по К мірній навчаючій виборці Y торів yk yk K k 1 М-мірних век M y(k) i 1 , k 1, К відліків комплексних ампi літуд аналізує мого процесу докладно розглянуті в [8]. Необхідні дані для настройки АРФ, а також елементи вектора (4) надходять на ПФСФ 17 з 2-го ПЗП 19. На вхід 2-го ПЗП 19 поступає управляючий сигнал з ФУС 3 на видачу цих даних. Елементи векторів (9,10) отримані перетворенням у ньому м- мірного вектору «поиска» х=х(f). 1 Зокрема, СФ (3) методу Кейпона S1 f p*p , 2 q1 СФ (5) методу ЛП при m=1 S2 f і при m=М 2 S2 f PM (Фiг.3). Поряд з (3, 5-8) на основі АРФ можна формувати цілий ряд інших СФ із практично корисними властивостями, зокрема, СФ [7] 1 1 * * ˆ ˆ S1( f , x ) pпрpпр , S2 ( f, x ) qпрqпр , (13) p* p x q* qx ˆ ˆ S3 ( f , x ) * x , S 4 ( f , x ) * x , pпрpпр qпрqпр (14) 1 * ˆ ( f , x ) p* p S5 пр пр qпрqпр (15) x M де p x pm m 1 i qx qm m M x 1 x - мірні підвектори, утворені першими x=1, M 1 компонентами вектора p (11) і останніми x ком понентами вектора q (12) відповідно, а через x M x pпр pm m M x 1 і qпр qm m 1 (M x ) - мірні підвектори, складені з решти елементів цих векторів (Фіг.3). СФ (3), (5-8), (13-15) з частковим або повним набором параметрів x 0, (М-1)/М у типових випадках М>>1 утворюють досить ємкий «АРФ-банк». Значення СФ (8) з ПФСФ 17 надходять до ВП 20. Стратегія використання «АРФ-банку» [8] визначається в ВП 20. Вона складається у форму ванні утворюючих його СФ S f у точках f з обраного сектора аналізу (fн, fк) і наступного відшукання їхніх головних максимумів. Під головними максимумами розуміють такі максимуми СФ, для яких виконуються умови: S fi / S i 1 0 ; S fi / S i 0, (16) fi ( fн, fк ) , (i 1, N) - упорядковані по зросде танню (ранжирувані) координати N максимумів СФ; i ( fн, fк ) , (i 0, N) - координати (N 1) ранжируваних мінімальних значень СФ; - апріорі обраний поріг (звичайно 0 8 0 (1 3) дБ). Для g-го (g 1,G) методу «АРФ-банку» число максимумів, що задовольняють умовам (16), приймається за число Ng розрішених радіолока тором БТ цілі, а координати fi(g) (i 1 Ng) ототож, ˆ нюються з відповідними оцінками максимумів fi . Вважається, що «АРФ-банк» розрішає БТ цілі кожного разу, коли хоча б один з G-методів «банку» розрішить їх (стратегія «хотя бы один из всех»). Число БТ NАтФ , розрішених банком, визначається максимальним числом БТ, NАтФ maxNg , g 1,G g (17) які розрізнені радіолокатором. Результати розрізнення двох рівнопотужних гармонік з відносною відстанню =0,1 і узагальненим відношенням сигнал/шум q=36дБ, М=17. На графіках показані залежності імовірності правильного розрішення Р від ефективного об'єму =К-М К-мірної навчаючої виборки, використаної при формуванні МП оцінки ˆ апріорі невідомої КМ Ф, імовірність правильного розрішення Р розраховане як відношення числа випробувань, при яких значення Nб n 2 , до їх загального числа NN=500. Сімейство тонких суцільних ліній 1, 2, 3 відповідають СФ (13-15), суцільна жирна крива 4 «АРФ-банку» наїх основі. З графіків видно, що ймовірність правильного розрішення «АРФ-банку» істотно вище, ніж любого з методів, включених у його склад (Фіг.4). З виходу ПЦО 16 інформація про дальність поступає на третій вхід індикатора 9, а також на вхід ОЗП 15, що є входом каналу розпізнавання 10. Канал розпізнавання 10 працює в такий спосіб. В ОЗП 15 запам'ятовуються значення S( f ) отриманого РДП з виходу ВП 20, і з першого виходу його подається управляючий сигнал на блок управління 11, що виробляє на своєму першому виході сигнали дозволу на видачу з першого ПЗП 14 значень РДП, що відповідають різним класам повітряних цілей. Із другого виходу ОЗП 15 значення S( f ) подаються на другий вхід корелятора 13, на перший вхід якого подаються значення еталонних РДП. У кореляторі 13 відбувається обчислення коефіцієнта кореляції між отриманим РДП і еталонами. Значення цього коефіцієнта надходять на перший вхід ПП 12, на другий вхід якого поступає пороговий рівень з другого виходу блоку управління 11. При перевищенні заданого порогу з ПП 12 видається сигнал про клас повітряної цілі, який поступає на другий вхід індикатора 9. Джерела інформації 1. Пат.2.606.159 (Франция). Радиолокационное устройство для измерения расстояния между этим устройством и объектом. - Заявлено 06.05.88г. 2. Небабин В. Г. Сергеев В. В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984 г. - с 121. 9 12905 10 3. Решение о выдаче патента по заявке 7. Леховицкий Д. И., Атаманский Д. В. Кирилов №9310138. РЛС с частотной модуляцией. Заяв. И. Г. Разновидности сверхразрешающих анализа27.05.92 г. торов пространственно-временного спектра слу4. Пат. 12453 Україна, МПК5 G01S13/34. Рачайных сигналов на основе обеляющих адаптивдіолокатор / В. Є. Кудряшов, В. А. Дорощук, А. А. ных решетчатых фильтров// Антенны.- 2000 г.Побережний, В. А. Яковенко. - № 95031239; Заяв. Вып. 2(45).- с.40-45. 20.03.95; Опубл. 28.02.97, Бюл. № 1. 8. Леховицкий Д. И., Милованов С. Б., Джус В. 5. Джонсон Д. Х. Применение методов спектВ., Мысик Ф. Ф. Сравнение разрешающей способрального оценивания к задачам определения ности комбинированных пеленгаторов различного угловых координат источников излучения. // ТИИтипа в приемных системах с неидентичными канаЭР. -т. 70. - № 90. - сентябрь 1982 г. - с. 129. лами//Антенны.-2003г. -Вып.12(79).- № 11-12.- с.96. Марпл-мл. С. Л. Цифровой спектральный 15. анализ и его приложения. -М.: Мир, 1990 г.-с. 418. 11 Комп’ютерна верстка А. Крижанівський 12905 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar
Автори англійськоюDoroschuk Valerii Anatoliiovych, Lekhovytskyi David Isaakovych
Назва патенту російськоюРадиолокатор
Автори російськоюДорощук Валерий Анатольевич, Леховицкий Давид Исаакович
МПК / Мітки
МПК: G01S 13/34
Мітки: радіолокатор
Код посилання
<a href="https://ua.patents.su/6-12905-radiolokator.html" target="_blank" rel="follow" title="База патентів України">Радіолокатор</a>
Радіолокатор
Номер патенту: 42178
Опубліковано: 15.08.2003
Автори: Піза Дмитро Макарович, Немчин Олександр Федорович, Мокеєв Юрій Геннадійович
МПК: G01S 13/42, G01S 13/00, G01S 7/36
Мітки: радіолокатор
Формула / Реферат:
1. Радіолокатор, що містить послідовно з’єднані дуально-поляризовану антену, перемикач прийом/передача, перший канал приймання, пристрій компенсації завад, індикатор та передавач, а також другий канал приймання, підключений до другого виходу антени, який відрізняється тим, що він додатково має когерентний приймач, синхронізатор та послідовно з’єднані перший логарифмічний підсилювач, перший детектор, перший інтегратор, суматор,...
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти
Номер патенту: 48459
Опубліковано: 15.08.2002
Автори: Соченко Петро Степанович, Зеленков Олександр Аврамович, Пазюк Олексій Вячеславович
МПК: G01R 27/02, G01R 27/00
Мітки: індуктивності, активного, вимірювач, ємності, повного, реактивного, частоти, опору, потужності
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти, який містить послідовно з'єднані навантаження, еталонний резистор та перший блок вимірювань, в який входять перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки ділення, перший, другий, третій та четвертий блоки множення та перший реєстратор, причому перший вивід навантаження з'єднаний з...
Радіолокатор
Номер патенту: 31345
Опубліковано: 15.12.2000
Автори: Наконечний Володимир Сергійович, Петров Ігор Валерійович, Побережний Андрій Анатолійович, Кудряшов Валерій Євгенович
МПК: G01S 13/34
Мітки: радіолокатор
Текст:
...вкодом першого перемно жувача 14 та Б другим входом другого перемножувача 15, а другий вихід ШП 18 їфізь мультиплексор 21 з'єднай Б третій входом першого перемножувала 14 та s входом інвертора 17, вихід останнього а'бднан а третім входом другого перемножувача15. Перший вихід 08П 26 крізь мультиплексор 19 підключен до багатоканального ка релятора 12, а другий вихід ШП 26 з'єднується а входом блока керування £4. Запропонований радіолокатор...
Конвеєрний пристрій
Номер патенту: 5781
Опубліковано: 15.03.2005
Автори: Кожем'яко Андрій Вікторович, Андрухова Ольга Олександрівна, Мартинюк Тетяна Борисівна, Волторніста Олена Едуардівна
МПК: G06F 7/509
Мітки: конвеєрний, пристрій
Формула / Реферат:
Конвеєрний пристрій, який містить n входів та n комірок, крім того, і-та комірка містить блок порівняння, суматор, вузол виділення загальної частини операндів, три регістри, D-тригер, мультиплексор і блок логічних елементів І, причому перший вхід і-ої комірки з'єднаний з першим входом мультиплексора, вихід якого підключений до входу першого регістра, вихід якого з'єднаний з першим входом блока порівняння та першим входом вузла виділення...
Конвеєрний пристрій
Номер патенту: 67652
Опубліковано: 15.06.2004
Автори: Куперштейн Леонід Михайлович, Лисогор Володимир Григорович, Дзісь Микола Вікторович, Мартинюк Тетяна Борисівна, Васюра Анатолій Степанович
МПК: G06F 7/575, G06F 7/38
Мітки: пристрій, конвеєрний
Формула / Реферат:
Конвеєрний пристрій, який складається з послідовно з'єднаних ярусів, кожний з яких містить регістр часткового результату, а шина тактових імпульсів пристрою з'єднана з входами встановлення тригерів, який відрізняється тим, що кожний і-тий ярус (і=1, ..., n, де n - кількість операндів) містить арифметично-логічний пристрій (АЛП), мультиплексор, а всі яруси, крім першого, містять мініматор та перший регістр, причому перший вхід і-го ярусу...
Попередній патент: Малогабаритний відеоприймач stv-01
Наступний патент: П`єзоелектричний перетворювач механічних величин
Випадковий патент: Спосіб лікування гастроезофагеальної рефлюксної хвороби у хворих на ревматоїдний артрит