Багатодвигунний електропривод
Номер патенту: 12989
Опубліковано: 28.02.1997
Автори: Охмакевич Василь Федорович, Бойчук Леонід Михайлович, Воронецький Ігор Якович






Формула / Реферат
(57)1 Многодвигательный электропривод, содержащий группу электродвигателей тянущих валов, системы управления которыми построены по принципу подчиненного регулирования, якорная обмотка каждого из электродвигателей подключена к преобразователю, в цепь управления которым включены последовательно соединенныепервыми входами регулятор тока, регулятор скорости и регулятор усилия натяжения, а также датчики тока, датчики скорости электродвигателей, датчики усилия натяжения по числу электродвигателей, подключенные ко вторым входам регуляторов тока, скорости и усилия натяжения соответственно, блок формирования усредненного значения управляемых величин, входы которого соединены с датчиками усилия натяжения, и задатчык управляющего сигнала по усилию натяжения, отличающийся тем. что в него дополнительно введены блок динамической коррекции задания, имеющий два входа и выходы по числу электродвигателей, причем первый вход этого блока соединен с задатчиком управляющего сигнала по усилию натяжения, второй вход соединен с выходом блока формирования усредненного значения управляемых величин, а выходы блока динамической коррекции задания соединены с первыми входами регуляторов усилия натяжения.
2. Многодвигательный электропривод по п. 1, отличающийся тем, что блок динамической коррекции задания содержит сдвоенный потенциометр, инвенгор с регулируемыми выходами по числу электродвигателей и сумматор, входы которого соединены с движками первого и второго резисторов сдвоенного потенциометра, а выход - со входом инвентора.
Текст
СІ УКРАЇНА (505 Н 02 Р 7/68 ОПИС ДО ПА ДЕРЖАВНЕ ПАТЕНТНЕ ВІДОМСТВО НА ВИНАХІД (54) БЛГАТОДВИГУННИЙ ЕЛЕКТРОПРИВОД 1 (20)95320538, 14.09.93 (21)4929117/SU (22)16.04.91 (24)28.02.97 (46)28.02.97. Бюп.М* 1 (56) Авторское свидетельстзо СССР № 1230691, кл. Н 02 Р 7/68, 1986 (прототип). (72) Бойчук Леонід Михайлович, Воронецький Ігор Якович, Охмакевич Василь Федорооич (73) Інститут кібернетики їм. В.М.Глушкова МАН України (UA), Український наукоаодослідіши і конструкторський інститут по розробці машин І устаткування для перероб ки пластичних мас, гуми І штучної шкіри (UA) (57) 1 .Многодвигательный электропривод, содержащий группу электродвигателей тя нущих палов, системы управления которыми построены по принципу подчиненного регу лирования, якорная обмотка каждого из электродвигателей подключена к преобра зователю, в цепь управления которым вклю чены последовательно соединенные первыми входами регулятор тока, регулятор скорости и регулятор усилия натяжения, а также датчики тока, датчики скорости элект родвигателей, датчики усилия натяжения по числу электродвигателей, подключенные ко вторым входам регуляторов тока, скорости и усилия натяжения соответственно, блок формирования усредненного значения управляемых величин, входы которого соединены с датчиками усилия натяжения, и задатчых управляющего сигнала по усилию натяжения, о т л и ч а ю щ и й с я тем. что в него дополнительно введены блок динамической коррекции задания, имеющий два входа и выходы по числу электродвигателей, причем первый вход этого блока соединен с задатчиком управляющего сигнала по усилию натяжения, второй вход соединен с выходом блока формирования усредненного значения управляемых величин, а выходы блока динамической коррекции задания соединены с первыми входами регуляторов усилия натяжения. 2. Многодвигательный электропривод по п. 1,о т л и ч а ю щ и й с я тем, что блок динамической коррекции задания содержит сдвоенный потенциометр, инвенгор с регулируемыми выходами по числу электродвигателей и сумматор, входы которого соединены с движками первого и второго резисторов сдвоенного потенциометра, а выход - со входом инвентора. С > К) со О Изобретение относится к области автоматизации технологических процессов и может найти применение, например, при регулировании и поддержании соотношений усилий натяжения материала в отдельных зонах мн огодвигательных технологических линий для производства многослойных полимерных материалов, Наиболее близким к заяоляемому является многодвигательный электропривод, представленный в виде функциональной схемы. Электропривод содержит электродвигатели М1-МЗ тянущих валков В1-ВЗ. Якорные обмотки электродвигателей подключены к преобразователям А1-АЗ, в цепь управления каждого из которых включены 12989 псг-ї^д оиательно с оед иненные с оответс т венно регу ляторы тока Р Т1-Р ТЗ. регу ляторы іюроиги Р С1-Р СЗ и регу ляторы натяж ения РН1-Р НЗ. Датчики тока ДТ1-ДТЗ и датчики скорос ти ДС1-ДСЗ подключены ко вх од ам 5 соответс твующих регу ляторов тока и скоро сти Су мматоры S 1-S3 первым вх одом под к л юч е н ы с о о тв е тс тве н н о к д а тч ик а м натяж ения ДН1-ДНЗ, а вторым вх од ом - к зад атчикам натяжения ЗН1-ЗНЗ К роме то- 10 го, э лектропривод с одержит д ополнитель ные сумматоры S 4-S5, блок формирования усред ненного значения ош ибок БФ УЗ и вы чис лительные блок и ВБ1-ВБ З, причем вх о д ы блока БФ УЗ с оед инены с вых од ами 15 сумматоров 51-S3, а выход -с о вход ом каж дого из блоков ББ 1-ВБЗ. Другие входы каж дого і'ч вычис лительных блоков соед инены с вых од тми дополнительных сумматоров S 4, S5. Первые и вторые вх оды кажд ого из д о- 20 полнительных сумматоров S 4, S5 соединены с выход ами соответс твенно сумматоров S1S3. В ыходы блоков ВБ 1-ВБЗ соед инены с входами с оответс твующих регу лятороп на тяж ения Р Н1-Р НЗ. 25 Электропривод выполнен по двуху ров невому принципу управления. На первом уровне под держивается заданное с оотношение усилий натяжения материала в отдельных зонах технологической линии. Ц ель 30 управления второго уровня - с табилизация зад анного значения вых одных величин. Оба уровня у правления при работе э лектропривод а фу нк ционируют од новременно. Ч ис ло суммзтороэ (51-53)д ля формирования ош и- 35 бок рассоглас ования зад анного и фактического vcuпия натяжения материала п зонах технолоіпческой линии, чис ло дополнительных сумматоров (S 4-S5) д ля формирования лш иСок зад анного соотношения ус илий на- 40 тяжеьия материала между зонами линии и чис ло вычислительных Олокоз заеисигот количес тва регу лируемых приводов. Поэ тому при переход е в ммогодвигятельнам электроприводе от меньшего чиелл управляемых 45 двигателем к большему наращиваетс я число указанных сумматоров и блоков, что излиш не ус ложняет электропривод. Требу емые суммарные сигнали у прапления э лектропривод ами, подаваемые с вых ода вычисли- 50 тельных блоков (ВБ1-ВБ З) на вх од ы ПИД -регу лятороо натяжения (Р Н1-Р НЗ). формируютс я из ош ибок расс огласования зад анн ых усилии на тяж е ни я и ош и бок расс оглас ования зад анного с оотношения 55 ус илий натяжения материала. Эти с игналы "о амплитуде- малы и. как резу льтат, много-д вигзгельный э лектропривод с тановитс я чувствительным к электропомех ам, к сопротивлению перех од ных контактов между вы числительными блок ами и регу ляторами натяжения, что понижаетточнос ть сис темы рег у л и р ов а н и я с о о тн ош е н и я ус илий натяж ения материала. Задачей изобретения является упрощение схемы и повыш ение помех оус тойчивос ти э лектропривод а. Пос тавленная зад ача реш аетс я тем, что в многодвигательный э лектропривод, сод ержащий гру ппу алектродвигаіелей тянущ их валов, сис темы у правления, которыми построены по принципу под чиненного регу лиров ан ия, як ор ная о бм о тка к ажд ог о и з электрод вигателей подключена к преобразователю, в цепь управления которым вклю чены пос лед овательно связанные первыми входами регу лятор тока, регулятор скорос ти и регулятор усилия натяжения, датчики тока, датчики скорос ти электродвигателей, датчики ус илия натяженич по чис лу привод ов , подключенные ко вторым вх од ам регу ляторов тока, скорос ти и усилия натяж ения соотве тс тв е н н о, б ло к фо р м и ро в ан и я усред ненного значения управляемых величин, вх од ы которого с оед инены сд атчиками усилия натяжения, и зад атчик управляющего с игнала по усилию натяж ения, с оглас но изобретению, дополнительно введ ен блок д инамичес кой коррекции зад ания, имеющий два входа и вых оды по чис лу привод ов, причем первый вход э того блока соединен с зад атчиком у правляющего с игнала по ус илию натяжения, второй вход соединен с выход ом блока формирования ус ред ненного значения управляемых величин, а вых од ы блок а д инамической коррек ции зад ания с оед инены с первыми входами регу ляторов усилия натяжения. Кроме того блок д инамической коррек ции зад ания содержит сдвоенный потенци ометр, инвертор с регу лиру емыми оыход ами по чис лу привод ов и сумматор, вх оды кото рого соед инены с д вижками первого и вто рого ре зис то р ов с д в о е н н ог о потенциометра, а вых од - со вх одом инвер тора. Сущнос ть изобретения поясняется чертежами, где на фиг. 1 изображена функ циональная блок-с х ема многод вигательного электропривод а, например, для регу лирования соотношения усилий натяжения материала в зонах тех нологической линии; на фиг. 2 привед ена функ циональная сх ема блока динамической коррек ции задания. Тянущие пары валов 1, 2. 3 транспортируют обрабатываемый материал 4 с заданной линейной скорос тью Мп Скорос ть определяю т под аю щие оалы 5, автономный э лектропривод которых рабо тае т в режиме под д ержания заданной час тоты вращения и на блок-схеме не пок азан. В алы 1. 2. 3, привод ятся во ора 12989 щение от электродвигателей 6, 7, 8. Управление этими электродвигателями производится от регулируемых тиристориых преобразователей. Каждый преобразователь содержит силовой блок 9 (10, 11) и систему управления. 5 Система управления силовым блоком преобразователя построена по принципу подчиненного регулирования с внутренними коніурами регулирования тока и скорости электродвигателя и внешним контуром регулирования на- 10 тлжения обрабатываемого материала. Контуры регулирования тока содержат регуляторы тока 12, 13, 14, на входы которых подаются сигналы обратной связи по току, снимаемые с датчиков тока 15, 16, 17, и вы- 15 ходные сигнали регуляторов скорости 18, 19, 20. Частота вращения вала каждого электродвигателя измеряется датчиками скорости 21, 22, 23, сигналы с которых поступают на вторые входы регуляторов 18, 19,20саот- 20 ветственно. Внешние контуры регулирования натяжения материала содержат регуляторы усилия натяжения 24, 25, 26, датчики усилия натяжения 27, 28, 29, соединенные со вторыми входами регуляторов 24. 25, 25 26 соответственно. Первыми входами регуляторы усилия натяжения соединены с регулируемыми выходами блока динамической коррекции задания 30, а выходы регуляторов 24, 25, 26 соединены с первыми входами 30 регуляторов скорости 18, 19, 20. Кроме того, сигналы датчиков 27, 28, 29 подаются на входы блока формирования усредненного значения управляемых величин 31, выход которого подключен ко второму входу блока 35 30. Первый вход блока 30 соединен с задат-чкком управляющих сигналов но усилию натяжения 32. Зздатчик32 представляет собой регулируемый резистор, на который подается стабилизированное напряжение от источ- 40 кика питания, а с движка этого резистора снимается задающий сигнал и подается на первый оход блоки динамической коррекции задания 30, Блок 30 содержит сдвоенный потеицио- 45 метр с резисторами 33, 34, инвертор 35 с регулируемыми выходами, соединенными с резисторами 36 по числу приводов, и сумматор 37. Входы сумматора 37 соединены с движками резисторов 33, 34 сдвоенного по- 50 тенциометра. Выход сумматора подключен ко входу инвертора 35. Резисторы 33, 34 сдвоенного потенциометра соединены таким образом, что сигналы, снимаемые с них зависят от положения движков резисторов. 55 При этом, если движки резисторов находятся в крайнем левом положении, то на сумматор 37 поступает только задающий сигнал по усилию натяжения материала с резистора 33, так как движок резистора 34 будет сое динен с общей точкой схемы. При нахождении движков резисторов в крайнем правом положении на сумматор 37 подается только сигнал, поступающий с блока формирования усредненного значения управляемых величин 31, Миогодвигательный электропривод работает следующим образом. Задатчиком 32 устанавливается требуемый сигнал управления. В результате этого электрический сигнал управления поступает на первый вход блока динамической коррекции задания 30, а именно на резистор 33. С дпижка последпего сигнал задания подается ма вход сумматора 37. С выхода сумматора через инвертор 35 задающий сигнал подается на резисторы 36 задания усилий натяжения материала в зонах линии. Сигналы задания с резисторов 36 поступают па входы регулируемых тиристориых преобразователей, которы е выд а ют н ап р я же н и я на электродвигатели 6, 7, 3. По мере разгона двигателей датчики скорости 21, 22. 23 вырабатывают электрические сигналы, которые используются в качестве отрицательной обратной связи по скорости, и подаются на вторые входы регуляторов 18, 19. 20. Кроме того, перемещаемый материал 4 воздействуег на датчики усилий натяжения 27, 2В, 29. Последние вырабатывают электрические сигналь», которые используются в качестве отрицательной обратной связи по усилию натяжения материала в каждой зоне линии, и подаются на вторые входы регуляторов 24, 25, 26. Одновременно электрические сигналы датчиков 27,28,29 подаются на входы блока формирования усредненного значения управляемых величин 31. Блок представляет собой сумматор с равноценными коэффициентами передачи по каждому входному каналу. На выходе сумматора подключен резистор, с движка которого снимается сигнал, равный сумме входных сигналов. Движок этого резистора установлен о положение, позволяющее снимать с него 1/п суммарного выходного сигнала сумматора, где п - число регулируемых электроприводов. Таким образом формируется усредненное значение управляемых величин Хер. С выхода блока 31 сформированный электрический сигнал поступает на второй вход блока динамической коррекции задания 30 на резистор 34. С дэижка резистора 34 часть сигнала усредненного значения управляемых величин равная (1-сг)Хср. поступает на вход сумматора 37. Электрические сигналы, поступающие на вход сумматора с движков резисторов 33, 34 имеют одинаковую полярность. Поэтому на сумматоре 37 12989 производ ится их арифметическое суммирование и подача су ммарного с игнала через инвертор 35 на резис торы 36 (инд ивидуальные задчтчики усилий натяжения материала D зонах технологической линии). Суммарные электрические сигналы зад ания пос тупают н? пх оды регу ляторов усилий натяж ения 24. 25 26, с вых од а которых сигналы ошибок рргулмровзния через регу ляторы скорос ти и гака под аются на силовые блоки 9, 10, 11 регу лируемых тирис торных преобразователей R итого изменяются напряж ения на якорях э лектродвигателей G, 7, 8. Происходит отработка требу емой час тоты вращения валов двигателей. Ос танов приоод ов осуществляется пу тем уменьш ения до ну ля с игнала управлен ия Д о л ев о е с о о тн ош е н и е с иг н а л а управления и с игнала усред ненного значения управляемых величин в суммарном с игнале зад ания па вых од е су мматора 37 составляет 1*100. Поэтому изменение частоти вращ ении вала одног о из элек тродвигателей вызывает изменение усилия натяжения материала в зоне линии. Одновременно изменяется сигнал усредненного значения управляем ых велич ин, а с л ед ова те льно, и суммарный сигнал задания. Если подающие валы 5 ке транспортируют материал в технологические зоны липни происходит синх ронное изменение частоты вращения ос тальных привод ов д о полной их ос тановки. 8 Таким образом, в пред лагаемом многодвигательном электроприводе на вход е каж д ог о р егу л я то р а у с и л и я н а тяж е н и я материала склад ываютс я положительный 5 электрический с игнал задания (с учетом его динамической коррекции) и отрицательный э лек тричес кий с игнал обратной с вязи по усилию натяжения материала в данной зоне линии. Уровни каждого из э тих с игналов иа 1Q нес колько поряд ков выш е, чем у ровень электрического сигнала ошибки регу лирования по усилию натяжения материала в схеме прототипа. Линии связи д ля передачи э лек трических сигналов задания с выход а блока 15 д инамической коррекции (в пред лагаемом электропривод е) и д ля передачи электричес ких с игналов ош ибок регу лирования по усилию натяжения материала (в прототипе) на вход ы сис тем управления силовыми бло20 ками преобразователей чу вс твительны к электропомех ам. Сигналы электропомех по модулю в этих линиях сравнимы с ошибк ами регулирования. Поэ тому с труктура пред лагаемого электропривода обладает повышен25 ной помехозащ ищеннос тью по с равнению с прототипом. Кроме того, по с равнению с о схемой прототипа упрощ аетс я схема многодвигательного э лектропривода, так как аппарату рно у меньш аетс я количес тво 30 операционных усилителей, необходимых для формирования сигналов управления. 12989 Фиг.1. 12989 Фиг.2. Упорядник Замовлення 4093 Техред М.Моргемтал Коректор М. Керецман Тираж Підписне Державне патентне відомство України, 254655. ГСП, КиТэ-53. Львівська пл., 8 Відкрите акціонерне товариства "Патент", м. Ужгород, вул.Гвгаріна, 401
ДивитисяДодаткова інформація
Назва патенту англійськоюMultimotor drive
Автори англійськоюBoichuk Leonid Mykhailovych, Voronetskyi Ihor Yakovych, Okhmakevych Vasyl Fedorovych
Назва патенту російськоюМногодвигательный электропривод
Автори російськоюБойчук Леонид Михайлович, Воронецкий Игорь Яковлевич, Охмакевич Василий Федорович
МПК / Мітки
МПК: H02P 5/68
Мітки: багатодвигунний, електропривод
Код посилання
<a href="https://ua.patents.su/6-12989-bagatodvigunnijj-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Багатодвигунний електропривод</a>
Частотно-регульований асинхроний електропривод
Номер патенту: 8583
Опубліковано: 30.09.1996
Автори: Епштейн Ісаак Ізраільович, Бару Олександр Юріьович
МПК: H02P 27/04
Мітки: асинхроний, частотно-регульований, електропривод
Формула / Реферат:
1. Частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, систему управления инвертором, снабженную двумя группами входов и подключенную выходами к входам управления автономного инвертора тока, датчики фазных...
Електропривод постійного струму
Номер патенту: 11501
Опубліковано: 25.12.1996
Автори: Костенко Людмила Степанівна, Воронецький Ігор Якович, Бондарчук Петро Максимович, Охмакевич Василь Федорович
МПК: H02P 25/02
Мітки: струму, електропривод, постійного
Формула / Реферат:
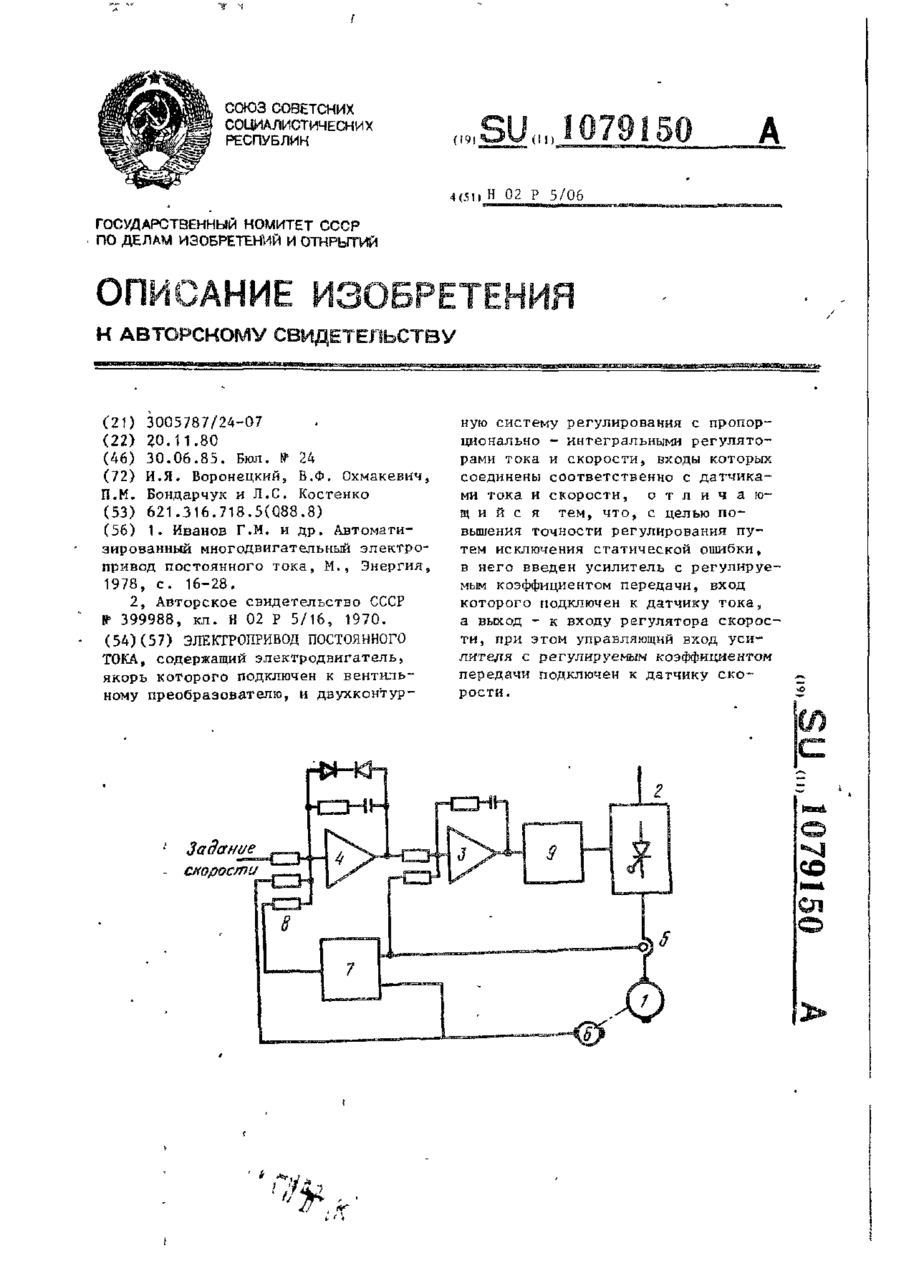
Электропривод постоянного тока, содержащий электродвигатель, якорь которого подключен к вентильному преобразователю, и двухконтурную систему регулирования с пропорционально-интегральными регуляторами тока и скорости, входы которых соединены соответственно с датчиками тока и скорости, отличающийся тем, что, с целью повышения точности регулирования путем исключения статической ошибки, в него введен усилитель с регулируемым коэффициентом...
Електропривод змінного струму

Номер патенту: 3189
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: електропривод, струму, змінного
Формула / Реферат:
Электропривод переменного тока, содержащий электродвигатель, задатчик фазных токов, два однофазных преобразователя тока, подключенные входами к выходам задатчика фазных токов, а первыми выходными выводами - к первому и второму входным выводам двигателя соответственно, отличающийся тем, что вторые выходные выводы преобразователя тока объединены и подключены к третьему входному выводу двигателя.
Електропривод постійного струму

Номер патенту: 4618
Опубліковано: 28.12.1994
Автор: Сороченко Микола Іванович
МПК: H02P 7/06
Мітки: електропривод, струму, постійного
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю с блоком управления, входы обратных связей и задания блока управления соединены с датчиками тока, скорости, положения и задатчиком режима работы, программируемый таймер, счетный вход которого подключен к генератору импульсов, а информационные входы и выходы, а также выход переполнения этого таймера подключены к...
Електропривод змінного струму

Номер патенту: 3557
Опубліковано: 27.12.1994
Автор: Вайнтрауб Володимир Ілліч
МПК: H02P 23/10, H02P 1/00, H02P 25/00, H02P 7/00, H02P 27/00
Мітки: змінного, електропривод, струму
Формула / Реферат:
Электропривод переменного тока, содержащий асинхронный электродвигатель, статорная обмотка которого через тиристорный регулятор напряжения подключена к питающей сети, блок сравнения, блок импульсно-фазового управления, первый цифроаналоговый преобразователь, установленный на валу асинхронного электродвигателя, импульсный датчик скорости, один выход которого через первый цифроаналоговый преобразователь подключен к одному входу блока...
Попередній патент: Фотоелектричний спосіб визначення концентрації речовин у рідких та газоподібних середовищах
Наступний патент: Пристрій управління механізмом розмотки рулонів довгомірного матеріалу
Випадковий патент: Автокомпенсаційний вимірник фізичних величин