Електропривод постійного струму

Формула / Реферат
Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю с блоком управления, входы обратных связей и задания блока управления соединены с датчиками тока, скорости, положения и задатчиком режима работы, программируемый таймер, счетный вход которого подключен к генератору импульсов, а информационные входы и выходы, а также выход переполнения этого таймера подключены к соответствующим входам и выходам блока управления тиристорами, вход датчика синхронизации предназначен для соединения с питающей сетью, управляющий вход тиристорного преобразователя через буферный регистр соединен с управляющими выходами блока управления тиристорами, отличающийся тем, что в него введен регистр внешнего события, синхровход которого подключен к датчику синхронизации, информационные входы этого регистра соединены с информационными выходами программируемого таймера, информационные выходы регистра внешнего события подключены к соответствующим входам блока управления тиристорами, а выход переполнения программируемого таймера соединен с разрешающим входом буферного регистра.
Текст
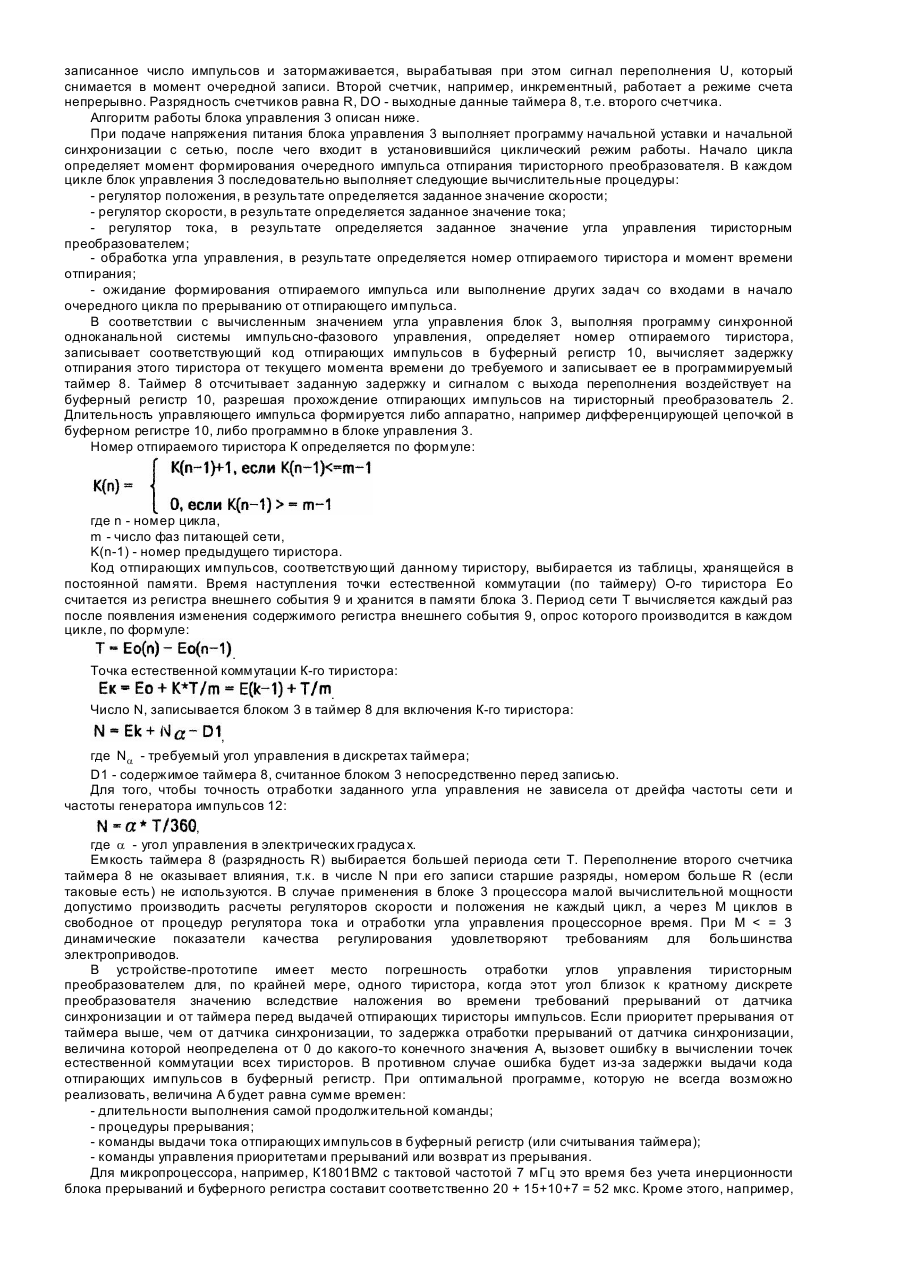
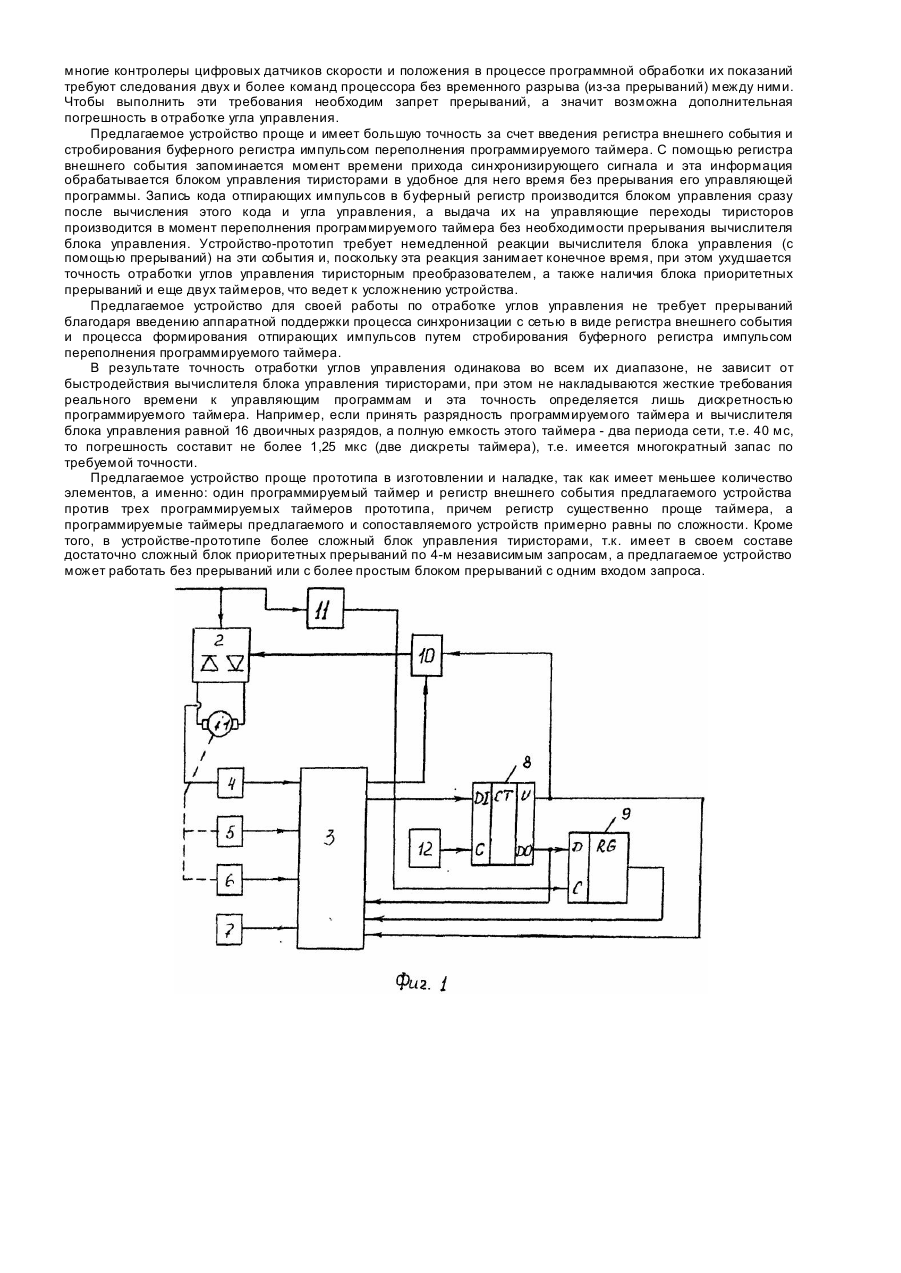
Изобретение относится к электротехнике и может быть использовано для регулирования положения, скорости и тока электродвигателей постоянного тока. Известно устройство для регулирования скорости электродвигателя постоянного тока [1], якорь которого подключен через вентильный преобразователь к сети переменного тока, содержащий цифровой вычислительный блок, дискретный датчик скорости, блок задания, дискретный датчик среднего значения тока якоря двигателя, коммутаторы, последовательно соединенные блок синхронизации и блок деления частоты, выход которого подключен к цифровому вычислительному блоку, последовательно соединенные блок преобразования и блок распределения импульсов, выход которого связан с вентильным преобразователем, а вход блока преобразования - через коммутатор с цифровым вычислительным блоком, к которому через другие указанные коммутаторы подключены датчик скорости и блок задания, причем управляющие входы блока преобразования цифрового кода в импульс напряжения, распределителя импульсов и коммутатора в их цепи соединены между собой и подключены к выходу блока синхронизации и цифровому вычислительному блоку, а соединенные между собой управляющие входы датчика среднего значения тока якоря электродвигателя и други х коммутаторов - к выходу блока деления частоты. Недостатком этого устройства является большая погрешность отработки угла управления тиристорным преобразователем при значениях этого угла, близких к кратным дискрете преобразователя, а также сложность из-за наличия многофазного блока синхронизации и делителя частоты. Известен электропривод постоянного тока [2], содержащий двигатель, подключенный к питающей сети через тиристорный преобразователь с блоком управления тиристорами, входы которого через коммутатор соединены с датчиком скорости, датчиком положения, датчиком тока, задатчиком скорости, генератор импульсов, датчик синхронизации, входом соединенный с питающей сетью, управляющий вход тиристорного преобразователя через буферный регистр соединен с выходами блока управления тиристорами, три программируемых таймера, информационные входы которых соединены с выходами блока управления тиристорами, входы прерывания программы которого соединены с выходами переполнения таймеров, счетные входы которых соединены с генератором импульсов, входы первого и второго таймеров соединены с выходом переполнения третьего таймера, выход переполнения третьего таймера, выход переполнения и вход второго таймера соединены между собой, информационный выход третьего таймера соединен с входом блока управления тиристорами, вход прерывания которого соединен с выходом датчика синхронизации, управляющий вход коммутатора и вход датчика тока соединены с выходом переполнения третьего таймера. Недостатком данного устройства является имеющаяся погрешность отработки углов управления тиристорным преобразователем для, по крайней мере, одного вентиля, когда этот угол близок к кратному дискрете преобразователя значению, вследствие наложения во времени требований прерывания от датчика синхронизации и от таймера перед выдачей управляющих импульсов, а также сложность из-за наличия трех таймеров и сложности блока управления тиристорами из-за наличия в нем блока приоритетных прерываний по 4-м запросам. Задачей изобретения является создание электропривода постоянного тока, обеспечивающего повышение точности регулирования за счет исключения погрешности отработки углов управления тиристорным преобразователем, а также обеспечивающего упрощение его за счет сокращения количества сложных элементов. Эта задача решена тем, что в электропривод постоянного тока, содержащий двигатель, подключенный к питающей сети через тиристорный преобразователь с блоком управления, входы которого соединены с датчиками скорости, датчиком положения, датчиком тока, задатчиком (скорости, положения или тока), программируемый таймер, счетный вход которого подключен к генератору импульсов, а информационные входы и выходы, а также выход переполнения этого таймера подключены к блоку управления, датчик синхронизации, входом соединенный с питающей сетью, управляющий вход тиристорного преобразователя через буферный регистр соединен с выходом блока управления, введен регистр внешнего события, синхровход которого подключен к датчику синхронизации, информационные входы этого регистра соединены с информационными выходами программируемого таймера, информационные выходы регистра внешнего события подключены к блоку управления, а выход переполнения программируемого таймера соединен с буферным регистром. Предполагаемое устройство представлено на фиг. 1. На фиг. 2 представлена функциональная схема программируемого таймера. Двигатель 1 подключен через тиристорный преобразователь 2 к питающей сети. Блок управления 3 своими входами подключен к датчику тока 4, датчику скорости 5, датчику положения 6, задатчику (тока, скорости или положения) 7, информационным выходом программируемого таймера 8 и регистра внешнего события 9, выходу переполнения таймера 8, а своими выходами - к буферному регистру 10 и к информационным входам программируемого таймера 8. Датчик синхронизации 11 своим входом подключен к питающей сети, а выходом к синхровходу регистра внешнего события 9. Генератор импульсов 12 своим выходом подключен к счетному входу таймера 8. Устройство работает следующим образом. С валом двигателя 1 механически связаны датчик скорости 5 и датчик положения 6, осуществляющие преобразование механических величин в электрические в виде аналогового сигнала или цифрового кода. В якорную цепь двигателя 1 установлен шунт, падение напряжения с которого подается на вход датчика тока 4, который вырабатывает нормированный аналоговый сигнал или цифровой код. Информацию вышеперечисленных датчиков, а также блока задания 7, вводят в блок управления 3, содержащий в себе вычислитель, например, на базе микропроцессора. Датчик синхронизации 11 содержит фильтр, выделяющий гармонику напряжения сети, и нуль-орган, который выдает импульсы, соответствующие моменту естественной коммутации тиристора тиристорного преобразователя 2, условно названного нулевым. Этот импульс воздействует на синхровход регистра внешнего события 9, который запоминает состояние выходных информационных сигналов программируемого таймера 8 в момент появления импульса датчика синхронизации 11. Таймер 8 состоит из двух счетчиков. Оба сче тчика считают импульсы, подаваемые на вход С. Первый (верхний на фиг. 2) счетчик декрементный и работает в ждущем режиме. Блок управления выставляет входные для таймера данные D1 и записывает их в первый счетчик сигналом записи W. Первый счетчик отсчитывает записанное число импульсов и затормаживается, вырабатывая при этом сигнал переполнения U, который снимается в момент очередной записи. Второй счетчик, например, инкрементный, работает а режиме счета непрерывно. Разрядность счетчиков равна R, DO - выходные данные таймера 8, т.е. второго счетчика. Алгоритм работы блока управления 3 описан ниже. При подаче напряжения питания блока управления 3 выполняет программу начальной уставки и начальной синхронизации с сетью, после чего входит в установившийся циклический режим работы. Начало цикла определяет момент формирования очередного импульса отпирания тиристорного преобразователя. В каждом цикле блок управления 3 последовательно выполняет следующие вычислительные процедуры: - регулятор положения, в результате определяется заданное значение скорости; - регулятор скорости, в результате определяется заданное значение тока; - регулятор тока, в результате определяется заданное значение угла управления тиристорным преобразователем; - обработка угла управления, в результате определяется номер отпираемого тиристора и момент времени отпирания; - ожидание формирования отпираемого импульса или выполнение других задач со входами в начало очередного цикла по прерыванию от отпирающего импульса. В соответствии с вычисленным значением угла управления блок 3, выполняя программу синхронной одноканальной системы импульсно-фазового управления, определяет номер отпираемого тиристора, записывает соответствующий код отпирающих импульсов в буферный регистр 10, вычисляет задержку отпирания этого тиристора от текущего момента времени до требуемого и записывает ее в программируемый таймер 8. Таймер 8 отсчитывает заданную задержку и сигналом с выхода переполнения воздействует на буферный регистр 10, разрешая прохождение отпирающих импульсов на тиристорный преобразователь 2. Длительность управляющего импульса формируется либо аппаратно, например дифференцирующей цепочкой в буферном регистре 10, либо программно в блоке управления 3. Номер отпираемого тиристора К определяется по формуле: где n - номер цикла, m - число фаз питающей сети, K(n-1) - номер предыдущего тиристора. Код отпирающих импульсов, соответствующий данному тиристору, выбирается из таблицы, хранящейся в постоянной памяти. Время наступления точки естественной коммутации (по таймеру) О-го тиристора Ео считается из регистра внешнего события 9 и хранится в памяти блока 3. Период сети Т вычисляется каждый раз после появления изменения содержимого регистра внешнего события 9, опрос которого производится в каждом цикле, по формуле: . Точка естественной коммутации К-го тиристора: . Число N, записывается блоком 3 в таймер 8 для включения К-го тиристора: , где Na - требуемый угол управления в дискретах таймера; D1 - содержимое таймера 8, считанное блоком 3 непосредственно перед записью. Для того, чтобы точность отработки заданного угла управления не зависела от дрейфа частоты сети и частоты генератора импульсов 12: , где a - угол управления в электрических градуса х. Емкость таймера 8 (разрядность R) выбирается большей периода сети Т. Переполнение второго счетчика таймера 8 не оказывает влияния, т.к. в числе N при его записи старшие разряды, номером больше R (если таковые есть) не используются. В случае применения в блоке 3 процессора малой вычислительной мощности допустимо производить расчеты регуляторов скорости и положения не каждый цикл, а через М циклов в свободное от процедур регулятора тока и отработки угла управления процессорное время. При М < = 3 динамические показатели качества регулирования удовлетворяют требованиям для большинства электроприводов. В устройстве-прототипе имеет место погрешность отработки углов управления тиристорным преобразователем для, по крайней мере, одного тиристора, когда этот угол близок к кратному дискрете преобразователя значению вследствие наложения во времени требований прерываний от датчика синхронизации и от таймера перед выдачей отпирающих тиристоры импульсов. Если приоритет прерывания от таймера выше, чем от датчика синхронизации, то задержка отработки прерываний от датчика синхронизации, величина которой неопределена от 0 до какого-то конечного значения А, вызовет ошибку в вычислении точек естественной коммутации всех тиристоров. В противном случае ошибка будет из-за задержки выдачи кода отпирающих импульсов в буферный регистр. При оптимальной программе, которую не всегда возможно реализовать, величина А будет равна сумме времен: - длительности выполнения самой продолжительной команды; - процедуры прерывания; - команды выдачи тока отпирающих импульсов в буферный регистр (или считывания таймера); - команды управления приоритетами прерываний или возврат из прерывания. Для микропроцессора, например, К1801ВМ2 с тактовой частотой 7 мГц это время без учета инерционности блока прерываний и буферного регистра составит соответственно 20 + 15+10+7 = 52 мкс. Кроме этого, например, многие контролеры цифровых датчиков скорости и положения в процессе программной обработки их показаний требуют следования двух и более команд процессора без временного разрыва (из-за прерываний) между ними. Чтобы выполнить эти требования необходим запрет прерываний, а значит возможна дополнительная погрешность в отработке угла управления. Предлагаемое устройство проще и имеет большую точность за счет введения регистра внешнего события и стробирования буферного регистра импульсом переполнения программируемого таймера. С помощью регистра внешнего события запоминается момент времени прихода синхронизирующего сигнала и эта информация обрабатывается блоком управления тиристорами в удобное для него время без прерывания его управляющей программы. Запись кода отпирающих импульсов в буферный регистр производится блоком управления сразу после вычисления этого кода и угла управления, а выдача их на управляющие переходы тиристоров производится в момент переполнения программируемого таймера без необходимости прерывания вычислителя блока управления. Устройство-прототип требует немедленной реакции вычислителя блока управления (с помощью прерываний) на эти события и, поскольку эта реакция занимает конечное время, при этом ухудшается точность отработки углов управления тиристорным преобразователем, а также наличия блока приоритетных прерываний и еще двух таймеров, что ведет к усложнению устройства. Предлагаемое устройство для своей работы по отработке углов управления не требует прерываний благодаря введению аппаратной поддержки процесса синхронизации с сетью в виде регистра внешнего события и процесса формирования отпирающих импульсов путем стробирования буферного регистра импульсом переполнения программируемого таймера. В результате точность отработки углов управления одинакова во всем их диапазоне, не зависит от быстродействия вычислителя блока управления тиристорами, при этом не накладываются жесткие требования реального времени к управляющим программам и эта точность определяется лишь дискретностью программируемого таймера. Например, если принять разрядность программируемого таймера и вычислителя блока управления равной 16 двоичных разрядов, а полную емкость этого таймера - два периода сети, т.е. 40 мс, то погрешность составит не более 1,25 мкс (две дискреты таймера), т.е. имеется многократный запас по требуемой точности. Предлагаемое устройство проще прототипа в изготовлении и наладке, так как имеет меньшее количество элементов, а именно: один программируемый таймер и регистр внешнего события предлагаемого устройства против трех программируемых таймеров прототипа, причем регистр существенно проще таймера, а программируемые таймеры предлагаемого и сопоставляемого устройств примерно равны по сложности. Кроме того, в устройстве-прототипе более сложный блок управления тиристорами, т.к. имеет в своем составе достаточно сложный блок приоритетных прерываний по 4-м независимым запросам, а предлагаемое устройство может работать без прерываний или с более простым блоком прерываний с одним входом запроса.
ДивитисяДодаткова інформація
Назва патенту англійськоюDc electric drive
Автори англійськоюSorochenko Mykola Ivanovych
Назва патенту російськоюЭлектропривод постоянного тока
Автори російськоюСороченко Николай Иванович
МПК / Мітки
МПК: H02P 7/06
Мітки: постійного, струму, електропривод
Код посилання
<a href="https://ua.patents.su/4-4618-elektroprivod-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Електропривод постійного струму</a>
Електропривід постійного струму
Номер патенту: 5006
Опубліковано: 28.12.1994
Автори: Мілютін Валентин Миколайович, Ясинецький Віктор Андрійович, Сідєльнікова Олена Васильівна, Ніколаєнко Борис Леонтійович
МПК: H02P 7/06
Мітки: струму, постійного, електропривід
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель с датчиком скорости, выход которого подключен к первому формирователю коротких им пульсов, к якорной обмотке электродвигателя подключен усилитель мощности, генератор эталонной частоты, соединенный с вторым формирователем коротких импульсов, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности, в него введены сдвиговый регистр и схема ИЛИ, причем вход старшего раз ряда и...
Електропривод змінного струму

Номер патенту: 3557
Опубліковано: 27.12.1994
Автор: Вайнтрауб Володимир Ілліч
МПК: H02P 7/00, H02P 1/00, H02P 25/00, H02P 27/00, H02P 23/10
Мітки: змінного, струму, електропривод
Формула / Реферат:
Электропривод переменного тока, содержащий асинхронный электродвигатель, статорная обмотка которого через тиристорный регулятор напряжения подключена к питающей сети, блок сравнения, блок импульсно-фазового управления, первый цифроаналоговый преобразователь, установленный на валу асинхронного электродвигателя, импульсный датчик скорости, один выход которого через первый цифроаналоговый преобразователь подключен к одному входу блока...
Перетворювач енергії змінного струму на вході в енергію постійного струму на виході для живлення дугового навантаження
Номер патенту: 3021
Опубліковано: 26.12.1994
Автори: Саньков Сергій Анатолійович, Бродський Гелій Михайлович, Магда Володимир Васильович, Маш'янов Володимир Гаврилович
МПК: H02M 7/10, H05B 7/144
Мітки: виході, живлення, енергії, постійного, енергію, навантаження, дугового, перетворювач, струму, змінного, вході
Формула / Реферат:
Преобразователь энергии переменного тока на входе в энергию постоянного тока на выходе для питания дуговой нагрузки, содержащий первую и вторую трехфазные нулевые управляемые вентильные группы, выводы переменного тока которых предназначены для соединения через вторичные обмотки питающего трансформатора, и уравнительный реактор с первым выводом для подключения нагрузки, трехфазную мостовую неуправляемую вентильную группу, выводы переменного...
Електропривод змінного струму

Номер патенту: 3189
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: електропривод, змінного, струму
Формула / Реферат:
Электропривод переменного тока, содержащий электродвигатель, задатчик фазных токов, два однофазных преобразователя тока, подключенные входами к выходам задатчика фазных токов, а первыми выходными выводами - к первому и второму входным выводам двигателя соответственно, отличающийся тем, что вторые выходные выводы преобразователя тока объединены и подключены к третьему входному выводу двигателя.
Пристрій для керування електричним режимом дугової сталеплавильної печі постійного струму
Номер патенту: 3022
Опубліковано: 26.12.1994
Автори: Філіпов Олексій Костянтинович, Магда Володимир Васильович, Малиновський Володимир Сергійович, Маш'янов Володимир Гаврилович, Саньков Сергій Анатолійович
МПК: H05B 7/148
Мітки: режимом, печі, пристрій, електричним, керування, постійного, сталеплавильної, дугової, струму
Формула / Реферат:
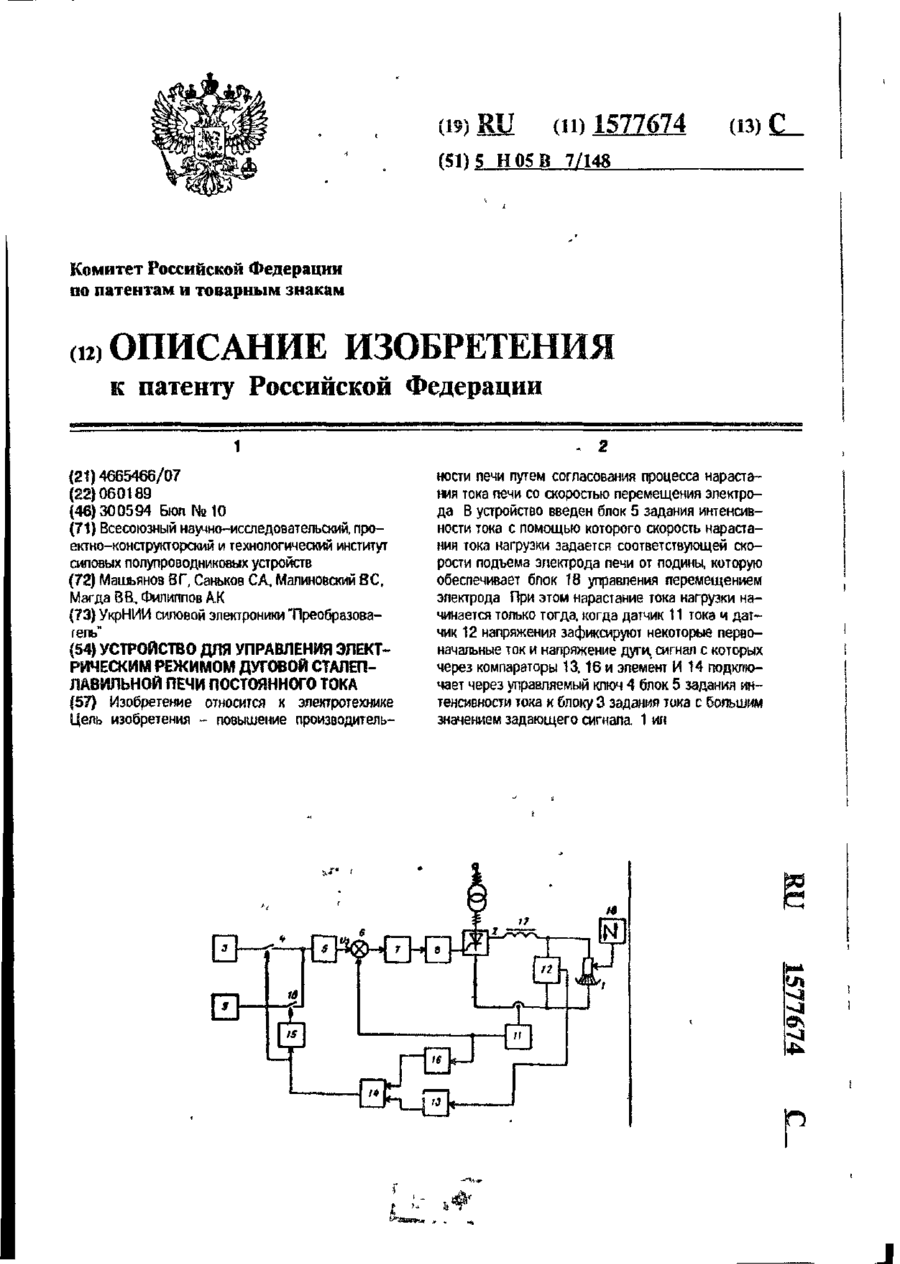
Устройство для управления электрическим режимом дуговой сталеплавильной печи постоянного тока, содержащее блок управления перемещением электрода, датчик тока электрода, выход которого соединен с первым входом блока сравнения, соединенного выходом с входом регулятора тока, выход которого соединен с входом системы импульсно-фазового управления источника питания, первый и второй блоки задания тока, первый и второй управляемые ключи и датчик...
Попередній патент: Автоклав
Наступний патент: Стенд для випробування пульсуючим гідравлічним тиском деталей машин
Випадковий патент: Багатошаровий еластомерний відвід