Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
Формула / Реферат
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от ребра рефлектора вдвое меньше расстояния d между вибраторами решетки, на выходе приемника включены параллельно два широкополосных диода противоположной полярности, выходы которых связаны через входные устройства связи со входами широкополосных усилителей видеоимпульсов с обратной связью в виде управляемых линий задержки с устройствами изменения длины и датчиками длины этих линий, выходы этих усилителей связаны через выходные устройства связи со своими индикаторами и входами управляемых линий задержки, выходы которых также связаны со входами своих усилителей через входные устройства связи, выходы датчиков длины линий задержки связаны с вычислителем угловых координат цели по соотношениям
где q, b - угол места и азимутальный угол цели;
d - расстояние между вибраторами приемной антенной решетки;
V - скорость распространения радиоволн в линиях задержки;
с - скорость света;
l1, l2 - длины первой и второй линии задержки, соответствующие максимальным значениям сигнала на входах первого и второго индикаторов соответственно.
Текст
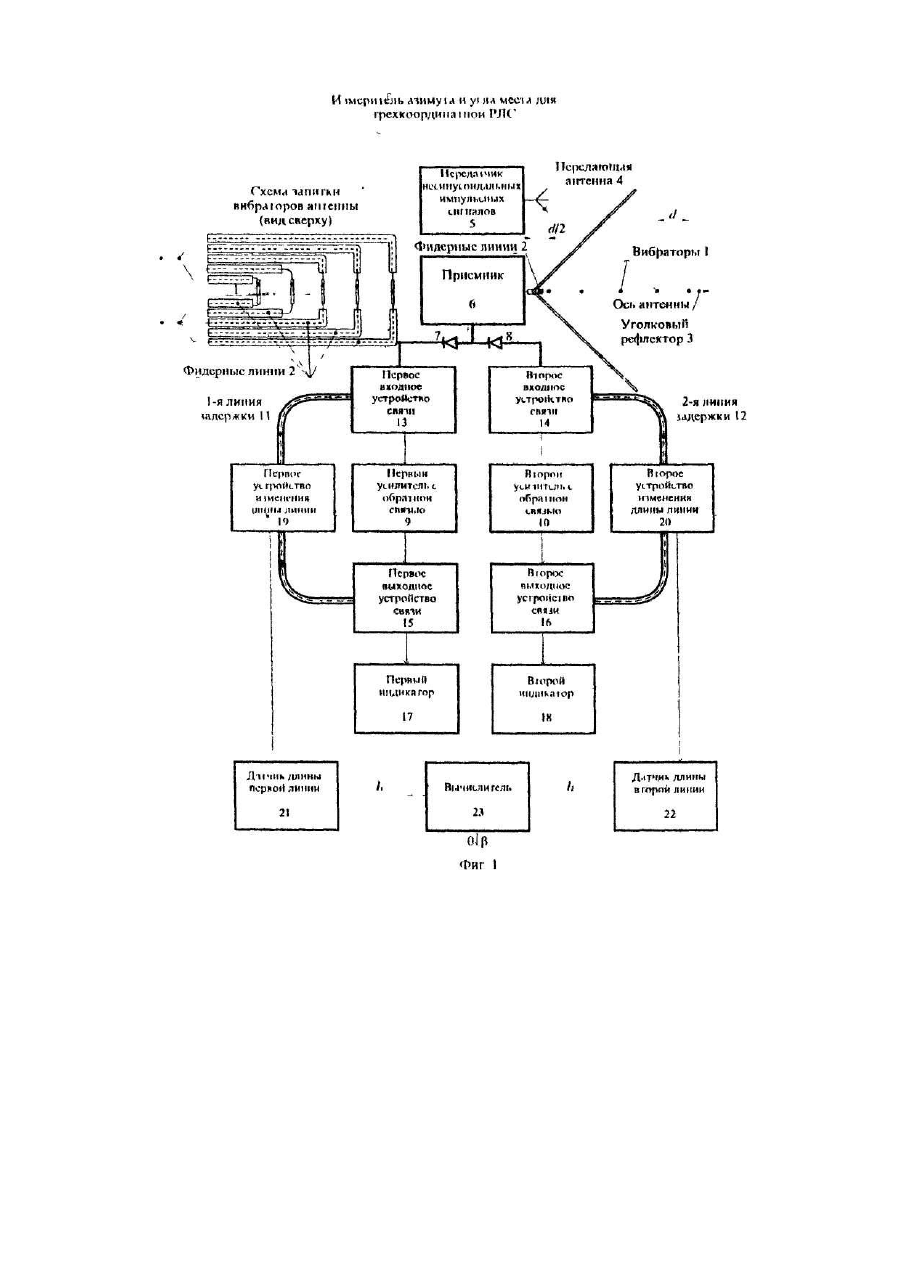
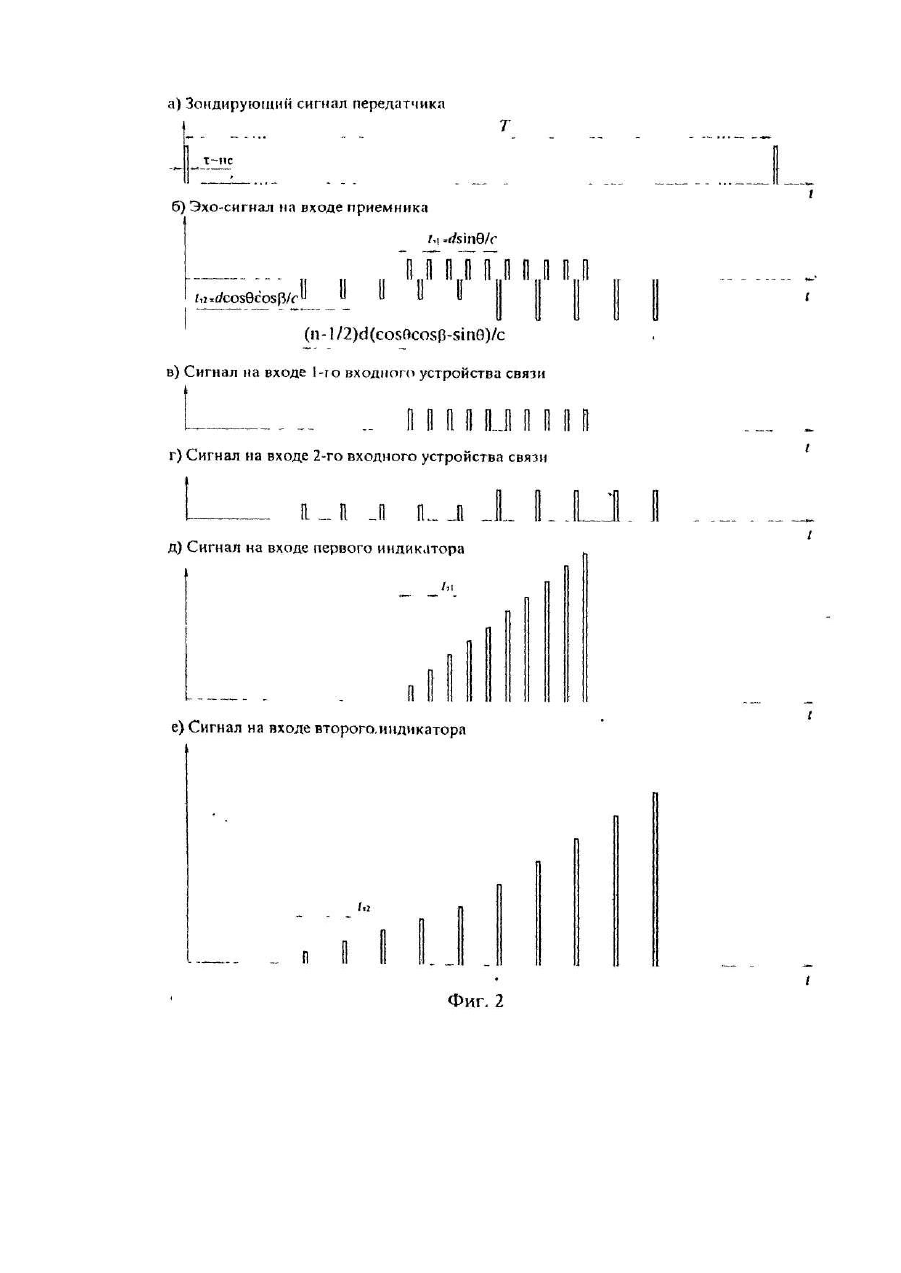
Изобретение относится к области радиолокации и может быть использовано в трех-координатных РЛС с несинусоидальным импульсным сигналом наносекундной длительности для измерения азимута и угла места воздушной цели. Известен фазовый измеритель угловых координат целей [1]. Он содержит две или более разнесенных антенны. Измерение угловых координат целей основано на измерении сдвига фаз синусоидальных сигналов, принимаемых этими антеннами. Недостатком этого аналога является то, что этому фазовому измерителю присуща неопределенность измерения угловых координат. В тех случаях, когда сдвиг фаз сигналов окажется больше 2p, определение угловы х координат становится неопределенным. Другой недостаток аналога состоит в том, что для измерения двух угловых координат требуется че тыре разнесенных в пространстве антенны и антенная система громоздка. Известен также радиолокатор с несинусоидальным импульсным сигналом, который можно использовать для измерения трех координат цели [2]. Этот аналог содержит разнесенную в пространстве антенную систему и излучает периодические импульсные сигналы наносекундной длительности без несущей частоты. Измерение угловы х координат основано на измерениях дальностей от разнесенных антенн до цели, а дальность определяют по времени запаздывания импульса эхо-сигнала относительно зондирующего импульса. При этом период следования импульсов Т обычно Т> 2rmIc, где г m - максимальная дальность обнаружения, с - скорость света. Это отграничение на период следований импульсов обусловлено необходимостью обеспечения однозначности измерения дальности по времени запаздывания. В таком аналоге для усиления сигналов иногда можно использовать усилитель видеоимпульсов с обратной связью [2]. В состав этого усилителя входят следующие элементы: широкополосный усилитель видеоимпульсов наносекундной длительности; неискажающая линия задержки, время задержки которой равно периоду следования импульсов Т (эта линия образует кольцо обратной связи усилителя); входное устройство связи, связывающее вход усилителя с источником сигнала и выходом линии задержки; выходное устройство связи, связывающее выход усилителя со входом линии задержки и с потребителем усиленного сигнала. Этот усилитель работает следующим образом. Импульс напряжения наносекундной длительности от источника сигнала поступает через входное устройство связи на вход усилителя видеоимпульсов, усиливается и через выходное устройство связи поступает на вход линии задержки. Эта линия задерживает сигнал на период следования. Задержанный импульс через входное устройство связи поступает на вход усилителя и в это же время на вход усилителя приходит второй импульс периодической последовательности от песочника сигнала через входное устройство связи. Эти импульсы складываются, снова усиливаются и процесс повторяется. В результате многократного прохождения сигнала по цепи обратной связи сигнал накапливается и усиливается, а усиленный сигнал можно выделить на выходе выходного устройства связи на фоне собственных шумов устройства. Такой усилитель накапливает и усиливает только периодические сигналы, период которых соответствуе т времени задержки линии задержки. Другие непериодические сигналы и шумы не будут накапливаться и усиливаться. То есть устройство обладает избирательностью. Рассматриваемый радиолокатор с описанным выше усилителем имеет следующий недостаток. Линия задержки в цепи обратной связи должна обеспечивать задержку на период следования Т, то есть длина линии должна быть почти вдвое больше максимальной дальности обнаружения rm. При больших дальностях rm неискажающую линию задержки наносекундных импульсов выполнить нельзя, так как длина ее и потери в ней будут очень велики. Это ограничивает возможности использования такого усилителя в радиолокатореаналоге. Другой недостаток аналога состоит в том, что для измерения двух угловы х координат цели требуется антенная система из четырех разнесенных антенн, то есть антенная система громоздка. В качестве прототипа выбрана РЛС определения высоты целей с качающейся по углу места антенной [3]. В состав прототипа входят следующие основные элементы: передатчик периодических синусоидальных сигналов в виде радиоимпульсов микросекундной длительности на несущей частоте микроволнового диапазона, приемопередающая антенна с антенным переключателем, приемник и индикатор. Антенна прототипа имеет узкую диаграмму направленности в вертикальной плоскости и качается по углу места. Угол места цели определяют по угломестному положению антенны в момент приема максимального эхо-сигнала цели. Высоту цели в прототипе определяют по результату измерения угла места и дальности, которую определяют по времени запаздывания эхо-сигнала относительно зондирующего импульса. Прототип можно использовать как трехкоординатную РЛС. При этом азимут цели определяют путем вращения антенны по азимуту, по азимутальному положению антенны в момент приема максимального сигнала. Недостатком прототипа является то, что для измерения угла места требуется антенна с узкой диаграммой направленности и большим вертикальным размером и эту громоздкую антенну требуется качать по углу места. Другим недостатком прототипа является то, что такая РЛС имеет малую дальность обнаружения целей с поглощающими покрытиями, которые поглощают радиоволны на несущей частоте РЛС. В основу изобретения поставлена задача устранения отмеченных недостатков аналогов и прототипа, обеспечения возможности измерения азимута и угла места цели с помощью неподвижной антенны, улучшение отношения сигнал/шум в каналах приема и увеличение дальности обнаружения целей, в том числе и целей с поглощающими покрытиями. Решение этой задачи достигается благодаря тому, что в измерителе азимута и угла места для трехкоординатной РЛС, содержащей передатчик с передающей антенной, приемник и индикатор, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от угла рефлектора вдвое меньше расстояния d между вибраторами решетки, на выходе приемника включены параллельно два широкополосных диода противоположной полярности, выходы которых связаны через входные устройства связи со входами широкополосных усилителей видеоимпульсов с обратной связью в виде управляемых линий задержки с устройствами изменения длины и датчиками длины этих линий, выходы эти х усилителей связаны через выходные устройства связи со своими индикаторами и входами управляемых линий задержки, выходы которых также связаны со входами своих усилителей через входные устройства связи, выходы датчиков длины линий задержки связаны с вычислителем угловых координат цели по соотношениям где Q,b - угол места и азимутальный угол цели; d - расстояние между вибраторами приемной антенной решетки; V - скорость распространения радиоволн в линиях задержки; с - скорость света; I1, І2 - длины первой и второй линий задержки, соответствующие максимальным значениям сигнала на входа х первого и второго индикаторов соответственно. При этом не требуется качать антенну по углу места и вращать ее по азимуту, но необходимо иметь информацию о том, с какой стороны от оси антенны (слева или справа) находится цель. Техническая сущность и принцип действия предложенного устройства поясняются рисунками на фиг. 1,2. На фиг.1 представлены упрощенная структурная схема предложенного устройства, эскиз приемкой антенны и схема запитки вибраторов этой антенны фидерными линиями из коаксиальных кабелей (вид сверху). На фиг.2 условно показаны упрощенные эпюры зондирующего сигнала, эхо-сигнала на входе приемника, сигналов на входах первого и второго входных устройств связи и первого и второго индикаторов. В состав предложенного устройства на фиг.1 входят следующие основные элементы: вибраторы приемной антенной решетки 1 длиной Iв 2rm/c; приемник 6; широкополосные диоды 7, 8 противоположной полярности для разделения положительных и отрицательных видеоимпульсов сигнала по двум параллельным каналам; широкополосные усилители видеоимпульсов 9, 10 с обратной связью в виде управляемых линий задержки 11, 12; входные устройства связи 13, 14 выходов линий задержки 11, 12 и диодов 7, 8 со входами усилителей 9, 10 соответственно; выходные устройства связи 15, 16 выходов усилителей 9, 10 со входами линий задержки 11, 12 и своими индикаторами 17, 18 соответственно; устройства 19, 20 изменения длины линий задержки 11,12 с датчиком 21, 22 длины I1, І2 эти х линий; вычислитель 23 угла места Q и азимутального угла b цели по соотношениям (1), (2) и значениям длин I1, I2 линий задержки 11,12, соответствующим максимальным значениям сигналов на входах индикаторов 17, 18. Принцип действия предложенного устройства поясняется следующим. Передатчик 5 формирует, а передающая антенна 4 излучает зондирующий сигнал в виде видеоимпульсов поля радиоволн без несущей частоты длительностью t~1нс и менее с периодом следования Т >2 rm/с, а эпюра этого зондирующего сигнала условно показана на фиг.2а. Этот сигнал распространяется до цели, отражается от цели, изменяя свою полярность при отражении, и возвращается к приемной антенне. Далее будет рассматриваться прием одного отрицательного импульса эхо-сигнала цели приемкой антенной. Каждый вибратор приемной антенной решетки принимает сигналы следующи х радиоволн (лучей) эхо-сигнала: 1) сигнал прямой волны от цели; 2) сигнал, отраженный один раз от левой грани рефлектора; 3) сигнал, отраженный один раз от правой грани рефлектора; 4) сигнал, дважды отраженный от рефлектора (сначала от левой грани, а потом - от правой); 5) сигнал, дважды отраженный от рефлектора (сначала от правой грани, а потом - от левой). При каждом отражении полярность импульса поля радиоволн изменяется [2]. Пути этих сигналов легче представить, если ввести так называемые "зеркальные изображения" вибраторов приемной антенны относительно двух взаимно перпендикулярных плоскостей рефлектора. Импульсы 2), 3) будут иметь положительную полярность, а импульсы 1), 4), 5) - отрицательную полярность. При этом импульсы 4), 5) имеют одинаковое время запаздывания и складываются по амплитуде. То есть от одного отрицательного импульса эхо-сигнала каждый вибратор примет по четыре импульса, два из которых положительны и два отрицательны. Всего на выходе приемника будет 2N положительных и 2N отрицательных импульсов, где N количество вибраторов приемной антенной решетки. Предложенная конструкция приемной антенны и специальное расположение вибраторов относительно рефлектора обеспечивают то, что положительные импульсы эхо-сигнала образуют периодическую последовательность с периодом а отрицательные импульсы - последовательность с периодом где Q,b - угловые координаты цели; d - расстояние между вибраторами решетки. При этом последовательность положительных импульсов смещена относительно последовательности отрицательных импульсов на время а эпюра импульсов на входе приемника от одного отрицательного импульса радиоволны, приходящей от цели, условно представлена на фиг.2б. Соотношения (3), (4), (5) получены из геометрии приемной антенны, эскиз которой показан на фиг.1. Положительные и отрицательные импульсы сигнала на выходе приемника 6 можно разделить с помощью широкополосных диодов 7, 8, подключенных к приемнику в противоположной полярности, а затем накопить и усилить эти периодические импульсы в двух каналах с помощью усилителя с обратной связью аналога [2]. Для этого необходимо, чтобы время задержки первой линии задержки 11 было равно t31, а время задержки второй линии задержки 12 было равно t32. При этом длина I1 первой линии задержи 11 должна быть равна а длина I2 второй линии задержки 12 должна быть где V - скорость распространения. Так как оптимальные длины линий I1, І2 зависят от угловы х координат цели Q,b и заранее не известны, то эти длины должны быть подобраны оператором РЛС с помощью устройств 19, 20 изменения длины линий задержки 11, 12 и наблюдений за уровнем сигнала на индикаторах 17, 18. При выполнении условий (6), (7) сигналы на индикаторах 17, 18 будут максимальны. Найденные оптимальные значения длин I1, І2 линий задержки 11, 12 можно использовать для определения угловых координат цели Q,b по соотношениям (1), (2), которые получены из (6), (7). Эпюры периодических импульсов сигналов, разделенных диодами 7, 8, на входах первого и второго устройств связи 13, 14 каналов приема с усилителями 9, 10 условно показаны на фиг.2в,г. При оптимальных длинах I1 , І 2 линий задержки 11, 12 усилители 9,10 с обратной связью будут накапливать и усиливать сигналы, а эпюры таких усиленных сигналов на входа х индикаторов 17, 18 условно показаны на фиг.2д,г. При этом усилители 9,10 накапливают только периодические сигналы с соответствующим периодом следования и не накапливают шумы и другие непериодические помехи. Использование этих усилителей в предложенном устройстве позволяет улучшить отношение сигнал/шум в каналах приема, увеличить дальность обнаружения и выделить сигналы цели на фоне собственных шумов приемника на индикаторах 17, 18. Удаление ближнего вибратора приемной антенной решетки на расстояние d/2 от ребра рефлектора необходимо для того, чтобы импульсы сигнала образовывали периодические последовательности и их можно было накапливать и усиливать усилителями с обратной связью 9, 10. В предложенном устройстве принципиально необходимо использовать несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты, так как только такие импульсы отраженных от рефлектора радиоволн могут быть разрешены по времени и объединены в периодические последовательности. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого; устройства. Основные элементы предложенного устройства на фиг.1 выполнены следующим образом. Антенны, передатчик 5 и приемник 6 выполнены для излучения и приема несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты. Такие системы могут быть практически реализованы, так как физические основы и принципы построения их известны и описаны в литературе [2]. Фидерные линии 2 запитывают вибраторы с концов, подключены параллельно ко входу приемника и выполнены из коаксиальных кабелей одинаковой длины для всех фидерных линий. Наружные оболочки этих кабелей служат для экранирования излучения линий, не являются несущими сигнал элементами и могут быть заземлены. Конструкция и работа широкополосных усилителей периодических видеоимпульсов 9, 10 с устройствами связи 13, 14, 15, 16 и линиями задержки 11, 12 описаны в литературе [2]. Линии задержки 11, 12 можно выполнить в виде отрезков коаксиальных или двухпроводных линий изменяемой длины. Такие линии могут быть практически реализованы, так как требуемые максимальные длины их сравнительно невелики и приемлемы для реализации. Индикаторы 17,18 аналогичны соответствующему устройству прототипа. Вычислитель 23 представляет собой микро-ЭВМ для вычисления угловы х координат цели по соотношениям (1), (2) и найденным оператором РЛС оптимальным значениям длин I1, І2 линий задержки 11,12. Эти значения длин I1, І 2 поступают на вычислитель 23 отдатчиков 21, 22 длин линий задержки. Динамика работы предложенного устройства осуществляется следующим образом. Передатчик 5 формирует, а его антенна 4 излучает импульс поля радиоволн наносекундной длительности без несущей частоты. Приемная антенна принимает импульс отраженной от цели радиоволны. При приеме радиоволны принимаются вибраторами 1 антенной решетки, отражаются от углового рефлектора 3 один или два раза и снова принимаются вибраторами. При каждом отражении полярность импульсов поля изменяется. То есть от одного отрицательного импульса эхо-сигнала каждый вибратор примет по четыре импульса, два из которых положительны и два отрицательны, а всего на входе приемника будет по 2N отрицательных И положительных импульсов. Предложенная конструкция приемной антенной решетки обеспечивает то, что положительные импульсы на входе приемника 6 будут представлять собой периодическую последовательность с периодом t31, а отрицательные - с периодом t32. Широкополосные диоды 7, 8 разделяют положительные и отрицательные импульсы сигнала по двум каналам усиления. Усилители с обратной связью 9, 10 при правильном выборе длин I1, І2 их линий задержки 11,12 накапливают и усиливают импульсы сигнала, но не накапливают шумы приемника. В результате сигнал может быть обнаружен на индикаторах 17, 18. Выбор оптимальных длин I1, І 2 линий задержки 11, 12 производит оператор РЛС с помощью устройств 19, 20 изменения длины этих линий, контролируя уровень сигналов по индикаторам 17, 18. После определения оптимальных длин I1, І2 линий задержки 11, 12 вычислитель 23 вычисляет угол места Q азимут b цели по соотношениям (1), (2). Таким образом, предложенное устройство устраняет отмеченные недостатки прототипа и аналогов, позволяет определять угловые координаты цели в секторе 90° с помощью неподвижных антенн, а также позволяет накопить и усилить импульсы эхо-сигналов, улучшить отношение сигнал/шум в канале приема и увеличить дальность обнаружения.
ДивитисяДодаткова інформація
Назва патенту англійськоюMeasuring device for azimuth and angle of elevation for three-coordinate radar station
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюИзмеритель азимута и угла места для трехкоординатной рлс
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: вимірювач, кута, рлс, трикоординатної, азимуту, місця
Код посилання
<a href="https://ua.patents.su/6-13418-vimiryuvach-azimutu-i-kuta-miscya-dlya-trikoordinatno-rls.html" target="_blank" rel="follow" title="База патентів України">Вимірювач азимуту і кута місця для трикоординатної рлс</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокатора, наземного, кута, місця, секвентного, вимірювання, спосіб, цілі
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Вимірювач відстані до місця короткого замикання
Номер патенту: 2057
Опубліковано: 20.12.1994
Автори: Носулько Віктор Дмитрович, Кизилов Володимир Улянович
МПК: G01R 31/08
Мітки: замикання, відстані, вимірювач, місця, короткого
Формула / Реферат:
Измеритель расстояния до места короткого замыкания, содержащий блоки выбора тока и напряжения, соединенные с поврежденными фазами объекта контроля, блок управления, выход которого соединен с управляющим входом блока памяти, к выходу которого подключен вход блока индикации, первый перемножитель, к первому входу которого подключен выход вычитателя, к первому входу которого подключен выход блока выбора напряжения, отличающийся тем, что, с...
Пристрій для уточнення місця електричного пробою ізоляції кабеля
Номер патенту: 2717
Опубліковано: 26.12.1994
Автор: Сейдер Едуард Самуїлович
МПК: G01R 31/08
Мітки: уточнення, ізоляції, місця, пристрій, пробою, електричного, кабеля
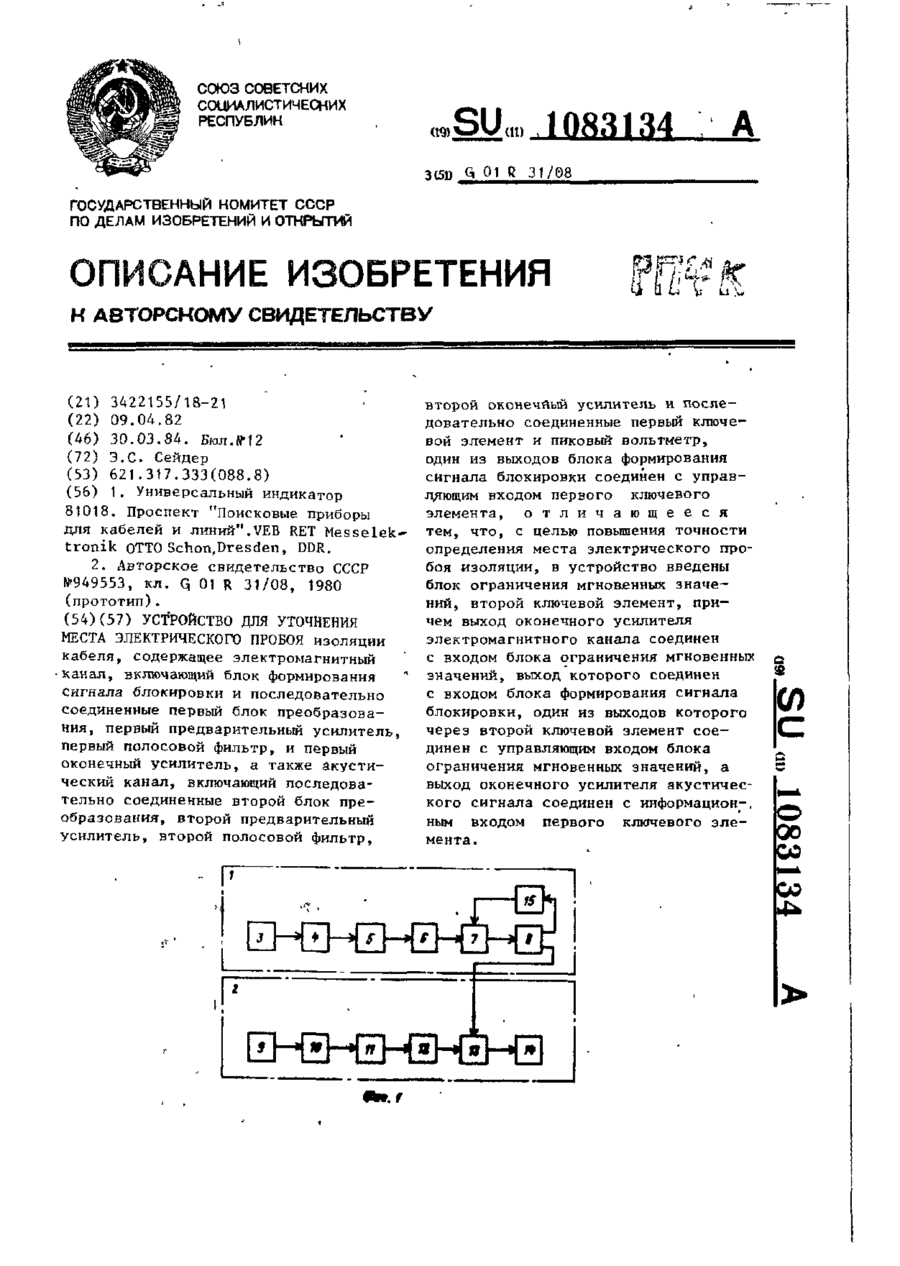
Формула / Реферат:
Устройство для уточнення места электрического пробоя изоляции кабеля, содержащее электромагнитный канал, включающий блок формирования сигнала блокировки и последовательно соединенные первый блок преобразования, первый предварительный усилитель, первый полосовой фильтр и первый оконечный усилитель, а также акустический канал, включающий последовательно соединенные второй блок преобразования, второй предварительный усилитель, второй...
Вимірювач активної потужності
Номер патенту: 6998
Опубліковано: 31.03.1995
Автори: Іванов Валерій Миколайович, Дюбченко Михайло Єфремович, Богданенко Віктор Павлович, Перевозчиков Михайло Семенович, Петрова Людмила Мефодіївна, Біньковський Юрій Анатолійович, Ситніков Валерій Степанович, Чистяков Леонід Юлійович
МПК: G01R 21/06
Мітки: потужності, активної, вимірювач
Формула / Реферат:
(57) 1. Измеритель активной мощности, содержащий датчик тока, датчик напряжения, устройство выборки-хранения, выход которого является выходом измерителя, и последовательно соединенные перемножитель, фильтр высоких частот, нуль-орган, выходы датчика тока и датчика напряжения соединены соответственно с первым и вторым входами перемножителя, отличающийся тем, что введены блок управления, управляемый блок выборки-хранения, сумматор, выход...
Пристрій регулювання кута випередження двигуна внутрішнього згорання

Номер патенту: 2073
Опубліковано: 26.12.1994
Автори: Лут Анатолій Іванович, Д'яконов Олександр Петрович, Столяров Сергій Михайлович
МПК: F02P 5/04
Мітки: пристрій, регулювання, кута, внутрішнього, згорання, випередження, двигуна
Формула / Реферат:
1. Устройство регулирования угла опережения зажигания двигателя внутреннего сгорания, содержащее датчик вибраций, последовательно соединенный с выходным процессором датчика, сглаживающим фильтром и первым компаратором, второй вход которого подключен к общей точке соединения выходного процессора датчика и сглаживающего фильтра, преобразователь "частота - напряжение", последовательно соединенный с регулятором равномерного управления...
Попередній патент: Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Наступний патент: Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Випадковий патент: Пристрій для контролю натягу каната