Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович

Формула / Реферат
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы эхо-сигнала цели с помощью индикатора, поворачивают антенну по азимуту до получения максимальной амплитуды видеоимпульсов эхо-сигнала на индикаторе, после этого измеряют время запаздывания t3 двух положительных видеоимпульсов эхо-сигнала относительно друг друга, а угловые координаты цели q и b определяют по соотношениям
где q - угол места цели;
b - азимутальный угол цели относительно н;іпр;і»-ления оси антенны после поворота;
h - высота подъема антенны над землей;
d - расстояние от вибратора до рефлектор;) антенны;
t3 - время запаздывания друг относительно друга двух положительных видеоимпульсов эхо-сигнала цели после поворота антенны;
с - скорость света.
Текст
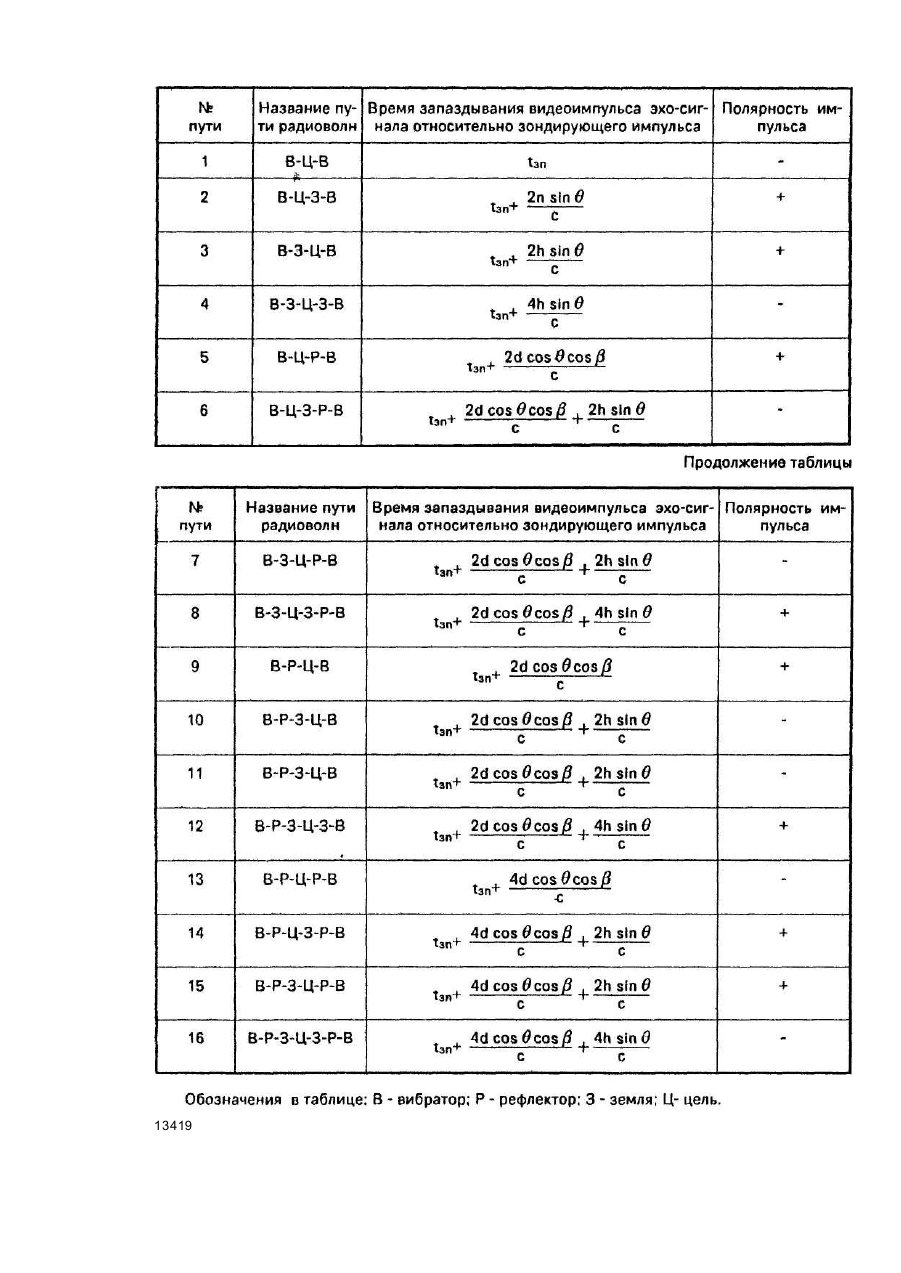
Изобретение относится к области радиолокации и может быть использовано в наземных секвентных радиолокаторах с несинусоидальным импульсным зондирующим сигналом в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты для измерения азимута и угла места воздушных целей в секторе малых углов места над землей. Известен способ измерения угловы х координат целей для импульсного радиолокатора микроволнового диапазона с качающейся по углу места антенной [1]. Способ заключается в излучении зондирующих радиоимпульсов на несущей часто те микроволнового диапазона с помощью одной приемо-передающей зеркальной антенны, приеме эхо-сигналов цели с помощью этой же антенны, переключаемой антенным переключателем, вращении антенны по азимуту и качании антенны по углу места. Принятые эхо-сигналы цели наблюдают на индикаторе, а угловые координаты цели определяют по положению антенны в момент приема максимального сигнала. Недостатком аналога является то, что этот способ содержит сложную операцию качания антенны по углу места. Другой недостаток состоит в том, что для реализации способа требуется антенна с узкой диаграммой направленности, то есть требуется антенна больших размеров. Третий недостаток состоит в том, что этот способ затруднительно использовать в секторе малых углов места над землей, так как отраженные от земли эхо-сигналы цели мешают проводить измерения. В качестве прототипа выбран способ измерения угловых координат цели для секвентного радиолокатора с несинусоидальным импульсным сигналом и разнесенной антенной системой [1]. Способ-прототип, заключается в излучении зондирующего си гнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели с помощью разнесенной антенной системы из четырех антенн, одна из которых является приемо-передающей, а три други х работают только на прием. Прием осуществляют с помощью четырех приемников, связанных с антеннами. Измеряют время запаздывания видеоимпульсов эхо-сигнала цели, принятых четырьмя разнесенными антеннами, относительно зондирующего видеоимпульса и по результатам измерений определяют расстояния от четырех разнесенных антенн до цели. Две угловые координаты цели определяют по найденным дальностям от антенн до цели. Сканировать антенную систему в прототипе не требуется. Приемо-передающую антенну переключают с передачи на прием с помощью антенного переключателя. Недостатком способа-прототипа является то, что для реализации способа требуется четыре разнесенные антенны и четыре приемника, а одной антенны и одного приемника не достаточно. Другой недостаток прототипа состоит в том, что этот способ затруднительно реализовать для измерения углов места целей в секторе малых углов места над землей. Это объясняется тем, что отраженные от земли эхо-сигналы воздушной цели затрудняют процесс измерений и зачастую не позволяют однозначно интерпретировать результаты измерений, В основу изобретения поставлена задача устранения отмеченных недостатков аналога и прототипа и обеспечение возможности измерения угловых координат воздушной цели в секторе малых углов места над землей с помощью секвентного радиолокатора с одной приемопередающей антенной и одним приемником. Поставленная задача решается тем, что в способе измерения угловых координат цели для наземного секвентного радиолокатора, заключающемся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей часто ты и приеме видеоимпульсов эхо-сигнала воздушной цели, согласно изобретению излучение и прием осуществляют с помощью одной приемопередающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы эхо-сигнала цели с помощью индикатора, поворачивают антенну по азимуту до получения максимальной амплитуды видеоимпульсов эхо-сигнала на индикаторе, после этого измеряют время запаздывания t3 двух положительных видеоимпульсов эхо-сигнала относительно друг друга, а угловые координаты цели Q и b определяют по соотношениям где Q - угол места цели; b - азимутальный угол цели относительно направления горизонтальной оси антенны после поворота; h - высота подъема антенны над землей; d - расстояние от вибратора до рефлектора антенны; t3 - время запаздывания друг относительно друга двух положительных видеоимпульсов эхо-сигнала цели после поворота антенны; с - скорость света. При этом полярность излучаемого вибратором видеоимпульса поля радиоволн условно принята положительной, ось антенны направлена горизонтально, а операция качания антенны по углу места в предложенном способе не используется. Техническая сущность и принцип действия предложенного способа поясняются рисунками на фиг,1,2. На фиг. 1 представлена упрощенная структурная схема секвентного радиолокатора для реализации предложенного способа, а также условно показаны вибраторная приемопередающая антенна с плоским металлическим рефлектором и фидерной линией из двух коаксиальных кабелей, цель, поверхность земли, лучи прямых и отраженных от земли радиоволн и эпюры зондирующего сигнала и эхо-сигнала на выходе приемника. На фиг.2 представлены упрощенные эпюры зондирующего видеоимпульса и видеоимпульсов эхосигнала цели на выходе приемника до поворота и после поворота антенны по азимуту. Схема на фиг.1 представляет возможный пример секвентного радиолокатора для реализации предложенного способа. В состав секвентного радиолокатора на схеме фиг.1 входят следующие основные элементы: короткий проволочный вибратор 1 (длина этого вибратора меньше сt, где t - длительность зондирующего видеоимпульса); плоский металлический рефлектор 2, удаленный от вибратора на расстояние d, которое значительно больше сt/2, а размеры рефлектора значительно больше размеров вибратора; фидерная линия 3 из двух коаксиальных кабелей для запитки вибратора 1 с концов (сигнал подводится по внутренним жилам этих кабелей, а наружные металлические оболочки кабелей заземлены); антенный переключатель 4 для переключения антенны с передачи на прием (этот переключатель закорачивает вход приемника на время излучения зондирующего видеоимпульса); электромеханическое устройство 5 для поворота антенны (вибратора с рефлектором) по азимуту; передатчик 6 несинусоидальных импульсных сигналов в виде видеоимпульсов наносекундной длительности без несущей частоты; приемник 7 в виде широкополосного усилителя наносекундных видеоимпульсов эхо-сигнала цели; индикатор 8 для визуального наблюдения видеоимпульсов эхо-сигналов цели с выхода приемника 7; широкополосный диод 9 для отделения положительных видеоимпульсов эхо-сигнала цели от отрицательных видеоимпульсов для того, чтобы последние не мешали проводить дальнейшие измерения; измеритель 11 времени запаздывания t3 двух положительных видеоимпульсов эхо-сигнала цели с выхода диода 9 друг относительно друга; вычислитель 11 для вычисления угла места Q и азимутального угла b цели относительно оси повернутой антенны по результату измерения t3 и известным размерам антенны d и h с помощью соотношений (1), (2). Ниже поясняется физическая сущность предложенного способа и обосновываются его существенные отличительные признаки. Предложенный способ основан на использовании отражений радиоволн от земли и рефлектора антенны, а также на использовании свойств наносекундных видеоимпульсов поля радиоволн изменять полярность импульса при каждом отражении от земли, рефлектора или цели [2]. Антенна секвентного радиолокатора поднята над землей на высоту h, а ось антенны направлена горизонтально. Радиоволны от вибратора 1 антенны до цели и обратно распространяются шестнадцатью возможными путями, которые указаны в таблице. В этой таблице указан номер пути радиоволн, а название пути обозначено буквами, которые обозначают следующее: В - вибратор; Р - рефлектор; З - земля; Ц - цель. В этой таблице также указана полярность видеоимпульсов сигнала на выходе приемника для соответствующи х путей, а также представлены математические соотношения для времени запаздывания соответствующих видеоимпульсов эхо-сигнала относительно зондирующего импульса. В эти х соотношениях tэ п - время запаздывания видеоимпульса прямой волны вибратора - цель-вибратор относительно зондирующего видеоимпульса; Q - угол места цели; b азимутальный угол цели относительно направления оси антенны; d - расстояние от вибратора до рефлектора антенны; h - высота подъема вибратора антенны над землей; с - скорость света. Математические соотношения в таблице получены из геометрии антенны и лучей радиоволн, показанных на фиг.1. Одному зондирующему видеоимпульсу соответствует 16 видеоимпульсов эхо-сигнала цели, при этом видеоимпульсы путей 2,3,5,9,8,12,14,15 на выходе приемника 7 имеют положительную полярность, а видеоимпульсы 1,4,6,7,10,11,13,16 - отрицательную полярность. Видеоимпульсы путей (2,3); (5,9); (8,12); (14, 15) имеют попарно одинаковое время запаздывания и складываются в вибраторе 1 при приеме. Отрицательные видеоимпульсы 6,7,10,11 также имеют одинаковое время запаздывания, складываются и образуют один отрицательный импульс увеличенной амплитуды. В результате эхо-сигнал на выходе приемника 7 до поворота антенны будет состоять из 9 видеоимпульсов как показано на фиг.2б. Около каждого импульса на этом рисунке указан номер пути, по которому этот импульс распространялся. Четыре из этих видеоимпульсов имеют положительную полярность, а остальные 5 импульсов - отрицательную полярность. Как видно из рисунка фиг.2б, сигнал на выходе приемника до поворота антенны состоит из трех групп видеоимпульсов по три импульса в каждой группе. Первая группа импульсов (1, (2,3), 4) не отражалась от рефлектора антенны. Вторая группа импульсов ((5,9), (6,7.10,11), (8,12)) отражалась от рефлектора один раз либо на пути к цели, либо на обратном пути. Третья группа импульсов (13, (14,15), 16) отражалась от рефлектора дважды (на пути к цели и на обратном пути). Импульсы одинаковой полярности в каждой из трех групп запаздывают друг относительно друга на время t3 равное Вторая группа импульсов запаздывает относительно первой группы на время а третья группа импульсов запаздывает относительно первой группы на время Предлагается изменить время запаздывания t32, t33 путем поворота оси антенны по азимуту на угол b относительно азимутального направления на цель таким образом, чтобы выполнялось соотношение В результате такого поворота импульсы (2,3) и (5,9) сложатся. Сложатся также импульсы 4, (6,7,10,11), 13 и образуют импульс отрицательной полярности увеличенной амплитуды, кроме того сложатся также импульсы (8,12) и (14,15). В результате такого поворота сигнал на выходе приемника 7 будет выглядеть примерно так, как показано на фиг.2в. и результирующие импульсы достигнут максимального значения по амплитуде. О правильности поворота антенны можно судить путем визуального наблюдения видеоимпульсов сигнала с помощью индикатора 8. После поворота антенны результирующий сигнал будет состоять из двух положительных импульсов, смещенных по времени на время запаздывания t3, определенное соотношением (3), а также из трех отрицательных импульсов как показано на фиг.2в. Положительные видеоимпульсы после поворота антенны отделяют от отрицательных импульсов с помощью диода 9 и измеряют время запаздывания t3 выделенных положительных импульсов друг относительно друга с помощью измерителя 10. Для вычисления угла места цели Q азимутального угла цели b относительно оси повернутой антенны предлагается использовать соотношения (1), (2), которые получены из (3), (4), (6). Эти вычисления осуществляют с помощью вычислителя 11 по результату измерения t3 и известным размерам антенны h, d. Таким образом, предложенный способ может быть практически реализован, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации способа. В качестве примера возможной реализации предложенного способа ниже приводятся следующие расчетные параметры секвентного радиолокатора для реализации способа: - длительность зондирующего импульса t= 1 нс; - полоса пропускания приемника 1 Ггц; - высота подъема антенны над землей h = 10 м; - длина вибратора I = 0,2 м; - расстояние от вибратора до рефлектора d = 1,5 м; - размер рефлектора 2,5 х 2,5; - рабочий угломестный сектор Q=0-10°. Проведенные расчеты подтверждают возможность практической реализации предложенного способа. Следует отметить, что соотношение (2) позволяет определить величину азимутального угла цели b относительно оси повернутой антенны, но знак угла (слева или справа от оси находится цель) остается неопределенным. Для устранения этой неопределенности предлагается выполнить следующие операции. Условно полагают, что цель находится слева от оси антенны, и поворачивает антенну вправо на угол 90° - b (b положительный). Если после этого сигнал цели на выходе приемника исчезнет, то цель находится слева от оси антенны, в противном случае цель находится справа от оси антенны. Предложенный способ осуществляют следующим образом. Излучают зондирующие видеоимпульсы поля радиоволн наносекундной длительности без несущей частоты с помощью вибраторной антенны с плоским металлическим рефлектором. Принимают эхо-сигналы воздушной цели этой же антенны. Радиоволны отражаются от земли, рефлектора антенными и цели и при каждом отражении полярность видеоимпульсов поля радиоволн изменяется. Радиоволны от вибратора до цели и обратно распространяются 16 различными путями (указанными в таблице) и одному зондирующему видеоимпульсу соответствует 16 видеоимпульсов эхо-сигнала цели. При приеме некоторые из этих импульсов складываются в вибраторе антенны. Принятые видеоимпульсы усиливают в приемнике 7 и визуально наблюдают с помощью индикатора 8. Поворачивают антенну по азимуту в любую сторону до получения максимальной амплитуды видеоимпульсов эхо-сигнала на индикаторе 8. При этом некоторые из импульсов сложатся и в результате останется два положительных импульса увеличенной амплитуды. Эти положительные видеоимпульсы выделяют диодом 9 и измеряют время запаздывания t3 эти х импульсов друг относительно друга с помощью измерителя 10. По результату измерения t3 вычисляют угло вые координаты цели Q и b с помощью вычислителя 11 и соотношений (1), (2). Достоинством предложенного способа является то, что он обеспечивает возможность измерения угловых координат цели в секторе малых углов места над землей. При этом отраженные от земли эхо-сигналы цели, которые мешали работе прототипа, в предложенном способе принципиально необходимы для достижения положительного эффекта. Для реализации способа достаточно только одной антенны и одного приемника. Таким образом, предложенный способ может быть практически реализован, обеспечивает получение положительного эффекта и устраняет отмеченные недостатки аналога и прототипа, 13419
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of angular coordinates of target for surface sequence radar
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюСпособ измерения угловых координат цели для наземного секвентного радиолокатора
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: наземного, вимірювання, радіолокатора, цілі, кутових, координат, секвентного, спосіб
Код посилання
<a href="https://ua.patents.su/6-13419-sposib-vimiryuvannya-kutovikh-koordinat-cili-dlya-nazemnogo-sekventnogo-radiolokatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: вимірювання, радіолокатора, спосіб, кута, наземного, місця, секвентного, цілі
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, місця, кута, рлс, трикоординатної, азимуту
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Спосіб вимірювання шумової температури чотирьохполюсників
Номер патенту: 9425
Опубліковано: 30.09.1996
Автор: Очковський Ігор Іванович
МПК: G01R 29/00
Мітки: вимірювання, спосіб, температури, шумової, чотирьохполюсників
Формула / Реферат:
Способ измерения шумовой температуры четырехполюсников, содержащий операцию подачи на вход измеряемого четырехполюсника шумового сигнала от эталонного источника с шумовой температурой T1, а сигнала с выхода четырехполюсника - на вход измерительного тракта, фиксации на частоте измерения шумовой температуры уровня мощности сигнала на выходе измерительного тракта, подачи на вход измеряемого четырехполюсника шумового сигнала от эталонного ...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Кравцов Володимир Геннадєвич, Гладиш Фелікс Леонідович, Шермаревич Владлен Георгієвич, Гегечкорі Сергій Олексійович, Невгасимий Олександр Федорович
МПК: G01S 13/00
Мітки: визначення, дальності, пристрій, цілі, радіолокаційний, швидкості
Формула / Реферат:
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Пристрій для вимірювання лінійних розмірів об’єкту
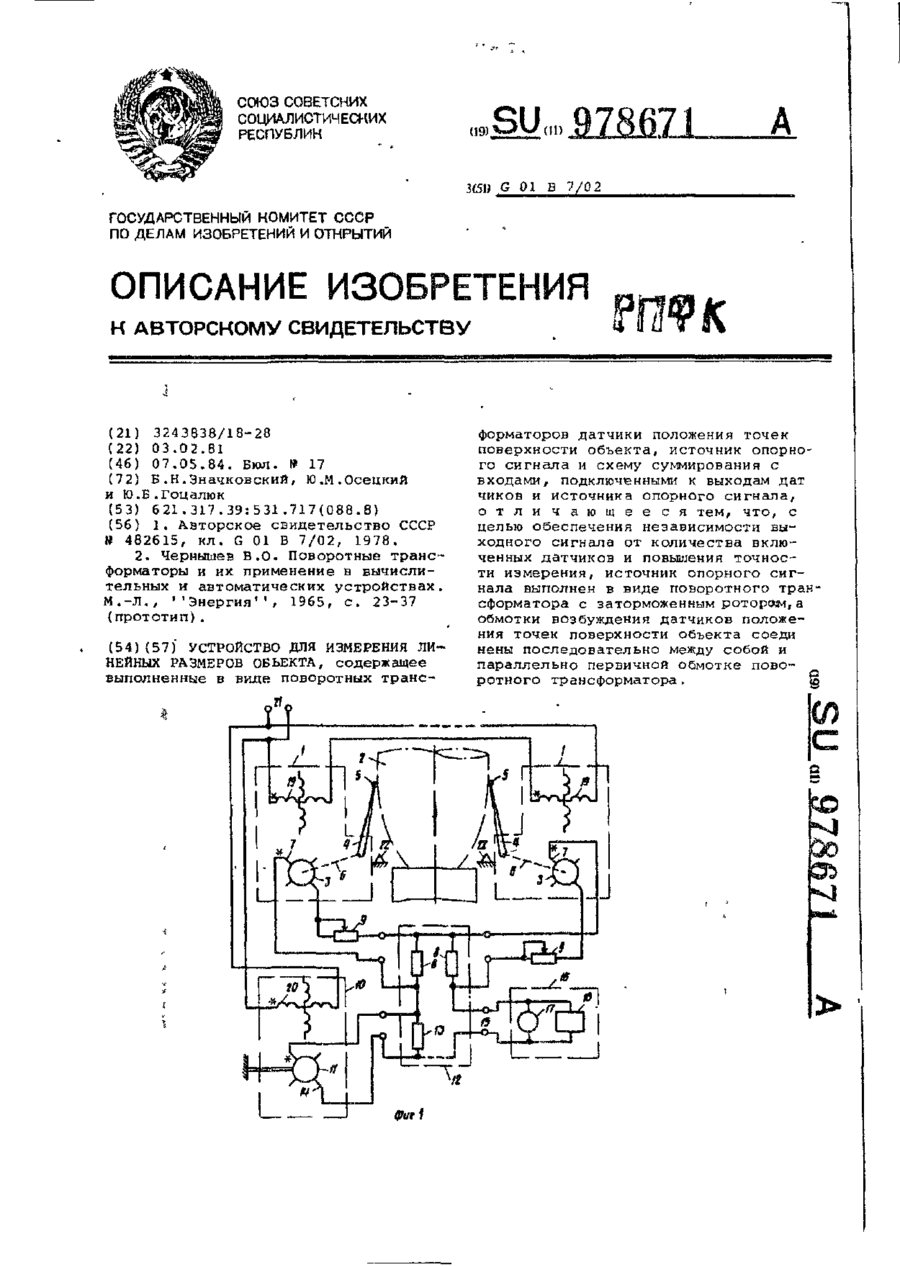
Номер патенту: 5080
Опубліковано: 28.12.1994
Автори: Значковський Борис Миколайович, Осецький Юрій Михайлович, Гоцалюк Юрій Борисович
МПК: G01B 7/02, G01B 11/00
Мітки: об'єкту, пристрій, вимірювання, розмірів, лінійних
Формула / Реферат:
Устройство для измерения линейных размеров объектов, содержащее выполненные в виде поворотных трансформаторов датчики положения точек поверхности объекта, источник опорного сигнала и схему суммирования со входами, подключенными к выходам датчиков и источника опорного сигнала, отличающееся тем, что, с щелью обеспечения независимости выходного сигнала от количества включенных датчиков и повышения точности измерения, источник опорного...
Попередній патент: Вимірювач азимуту і кута місця для трикоординатної рлс
Наступний патент: Радіолокаційний вимірювач кута місця цілі
Випадковий патент: Спосіб визначення зон скупчення метану на невідпрацьованих ділянках шахт та ділянках розвідки