Зондуючий комплекс профілю швидкості течії
Номер патенту: 14172
Опубліковано: 25.04.1997
Автори: Кушнір Володимир Моісейович, Колтаков Юрій Миколайович
Формула / Реферат
Зондирующий комплекс профиля скоростей течения, содержащий корпус, измеритель гидростатического давления, выход которого соединен с входом коммутатора каналов, два акустических измерителя скорости течения, измерительные базы которых ориентированы перпендикулярно продольной оси корпуса, а парные выходы соединены соответственно со входами коммутатора каналов измеритель угла азимута, подключенный к входу коммутатора, выход которого через преобразователь угол - временной интервал соединен со входом коммутатора каналов, два выхода которого подключены к первым входам двух счетчиков, ко вторым вентильным входам которых подключен генератор опорной частоты, а выходы счетчиков через преобразователь кода и модулятор связи соединены кабельтросовой линией с бортовой аппаратурой, выход которой через приемник-демодулятор подключен к входу магнитного регистратора и к выходу коммутатора бортовых измерителей, причем один из его входов соединен с блоком управления, подключенным к выходу приемника-демодулятора, а другой вход коммутатора бортовых измерителей соединен с выходом измерителя изменения координат судна по данным радионавигационной системы, отличающийся тем, что, с целью повышения точности измерения, в него дополнительно введены два измерителя углов отклонения продольной оси корпуса от вертикали, третий акустический измеритель, база которого ориентирована по продольной оси корпуса, измеритель курса судна, измеритель интервалов времени, измеритель длины сматываемого кабель-троса, измеритель угла отклонения кабель-троса от поперечной плоскости судна, причем измерители углов отклонения продольной оси корпуса от вертикали через коммутатор, и преобразователь угол-временной интервал и парные выходы третьего акустического измерителя скорости подключены ко входу коммутатора каналов, а выходы измерителей курса судна, интервалов времени, длины сматываемого кабель-троса, угла отклонения кабель-троса от поперечной плоскости судна соединены с входами коммутатора бортовых измерителей, выход которого соединен с магнитным регистратором.
Текст
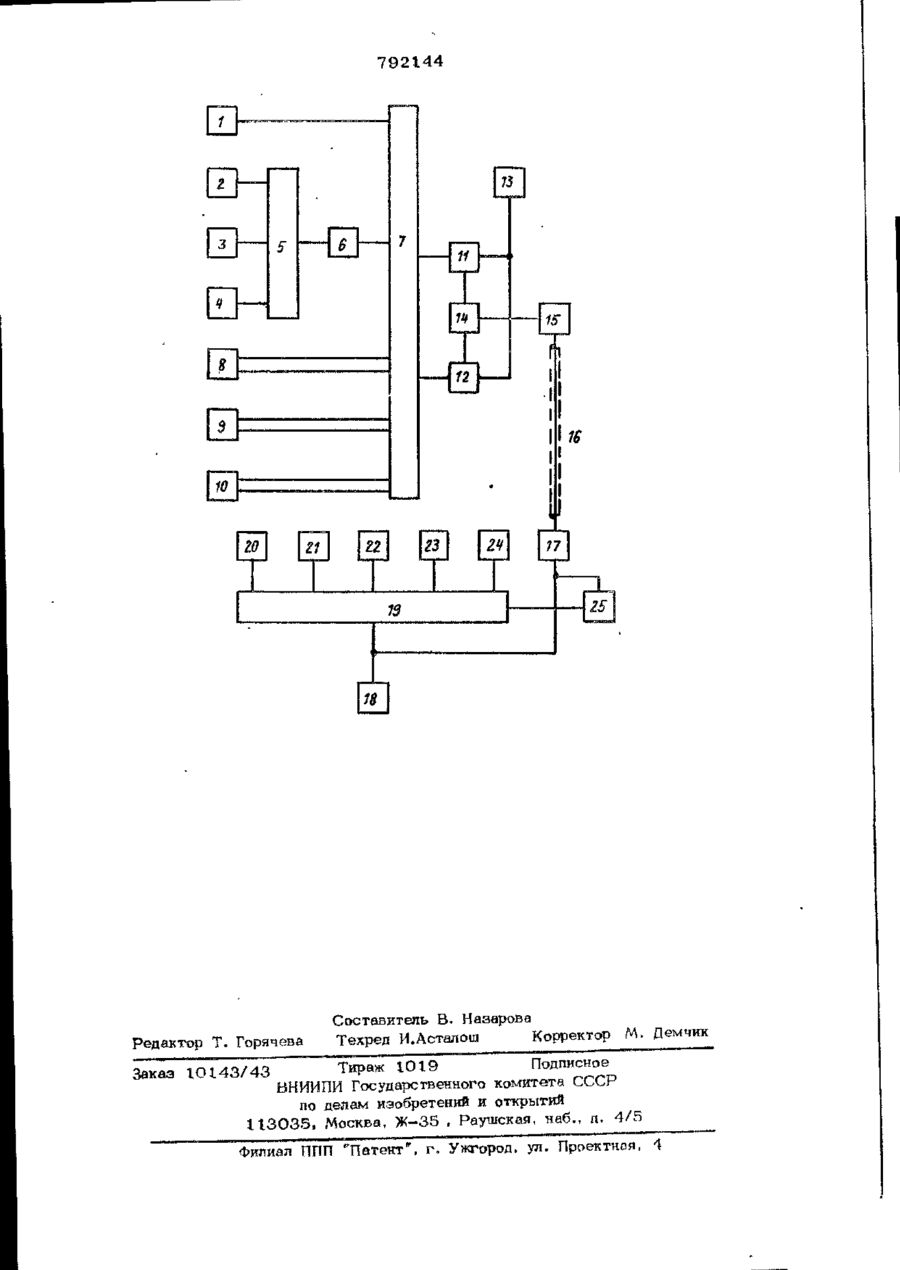
Союз Советских Социалистических Республик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) Дополнительное к авт. свид-ву (22)3аявлено 28.03.79 ~ (21)2744025/18-10 с присоединением заявки № ** qoi p 5/оо Государстеэннын комитет СССР (23)Приоритет по делам изобретений и сггрыгий Опубликовано 30.12.80. Бюллетень № 48 Дата опубликования опнсанняОЗ.СЦ.8і (72) Авторы изобретения (53)УДК532. .574(088.8 В. М. Кушнир и Ю. Н. Колтахов Морской гидрофизический институт АН Украинской ССР (71) Заявитель ( 5 4 ) ЗОНДИРУЮЩИЙ КОМПЛЕКС ПРОФИЛЯ СКОРОСТЕЙ ТЕЧЕНИЯ 1 Изобретение относится к технике и з - | мерения скорости текучих сред и может быть использовано для измерения параметров вертикального распределения г о ризонтальной скорости течения в океане. Известен измерительный комплекс для получения данных о распределениях скорости течений в океане £ t l . В этом измерителе используются акустические или электромагнитные измерители скорости течения с применением нескольких измерительных баз. Недостатком, гтріт іїзмере их вертикального распределения скорости океанических течений является невысокая точность из-за отсутствия измерительного канала \5 глубины и контроля положения измерителя в потоке. Известен также измерительный зондирующий комплекс для получения данных 20 о вертикальных распределениях горизонтальной скорости течения R океане, например даухкоординагный измеритель скорости воды [ 2 І . В этих приборах используется вращение чувствительных элементов вокруг своей продольной оси для модуляции сигналов геомагнитным полем или полем,течения и последующее выделение компонент вектора скорости. При этом не устраняется влияние сноса прибора течениями, имеет место сильная зависимость чувствительности измерителей от географической широты или величины скорости., Сами по себе приборы сложны и обладают низкой надежностью. Наиболее близким по технической сущности является зондирующий комплекс профиля скоростей течения, содержащий корпус, измеритель гидростатического давления, выход которого соединен с выходом коммутатора каналов, два акустических измерителя скорости течения, измерительные базы которых ориентированы перпендикулярно продольной оси корпуса, а их парные выходы соединены соответственно со входами коммутатора каналов, измеритель угла азимута, под 792144 4 кяючекный к входу коммутатора, пыход Он содержит измеритель 1 гидростакоторого через преобразоватоль уголтического давления, выходным параметвременной интервал соединен с входом ром которого является временной инкоммутатора каналов, два выхода тервал, пропорциональный периоду импульсов первичного преобразователя давления, которого подключены к первым входам 'гидроскопическии измеритель 2 угла двух счетчиков, ко вторым вентильным азимута и измерители 3 и 4 углов отвходам которых подключен генератор клонения продольной оси зонда от вертиопорной частоты, а выходы счетчиков -кали. Выходы измерителей 2 , 3 и 4 соечерез преобразователь кода и модулятор связи соединены кабельтросовой линией 10 динены со входами коммутатора 5, выход которого через преобразователь 6 уголс бортовой аппаратурой, выход которой временной интервал совместно с выходом через приемник-демодулятор подключен измерителя 1 гидростатического давления к входу магнитного регистратора и к выподключен к первому ч второму входам ходу коммутатора бортовых измерителей, коммутатора 7 каналов соответственно. причем один из его входов соединен с 15 Третий и четвертый, пятый и шестой, блокам управления, подключенным к седьмой и восьмой входы коммутатора 7 выходу приемнюш-аемодулятора, а другой каналов соединены соответственно с парвход коммутатора бортовых измерителен ными выходами трех взаимно перпендикусоединен с выходом измерителя изменения координат судна по данной радионавигационной системы j_3j. Недостатком измерительного комплексса является его невысокая точность и з за погрешностей, вызванных отклонением продоухъзой оси зонда от вертикали под действием течений и сносом зонда от та судна при погружении. 2 0 лярных акустических измерителей 8-10 скорости течения, причем измерительные базы акустических измерителей 8 и 9 ориентированы вдоль взаимно перпендикулярных поперечных осей корпуса, а и з 25 мерительная база акустического измерителя 10 - по продольной оси корпуса. Первый и второй выходы коммутатора 7 каналов соединены соответственно с пер-' Цепыо изобретения является повышезыми входами вентилей счетчиков 1 1 и ние точности измерения. 30 12, вторые входы которых подключены Поставленная цель достигается тем, к генератору 13 опорной частоты, а что в зондирующий комплекс просЬнля сковыходы счетчиков соединены с входами ростей течения дополнительно введены преобразователя 14 параллельного кода два измерителя углов отклонения продольв последовательный, выход которого че~ ной оси корпуса от вертикали, третий 35 рез модулятор 15 связи подключен к акустический измеритель скорости течевходу кабельгросовой линии связи между ния, база которого ориентирована по погружной и бортовой аппаратурой 16. продольной оси корпуса, измеритель Выход кабельтросовой линии связи через курса судна, измеритель интервалов вреприемник-таемодулятор 17 соединен с мени, измеритель длины сматываемого 40 входом магнитного регистратора 18. К кабель-троса, измеритель угла отклонеэтому же входу подключен выход коммутания кабель-троса от поперечной' плоское-* тора 10 бортовых измерителей, к первоти судна, причем исмерители углов отму- пятому входам которого подключены клонения продольно оси зонда от вертикасоответственно выходы бортовых измери— ли через коммутатор, и преобразователь 4 5 телей курса судна 2 0 , изменения кооругол-временной интервал и парные выдинат судна по данным радионавигационходы третьего акустического измерителя ной системы 2 1 , интервалов времени 22, скорости подключены ко входам комдлины сматываемого кабель-троса 2 3 и мутатора каналов, а выходы измериугла отклонения кабель-тросе от поперечтеля курса судне, измеритеая интер50 ной плоскости судна 2 4 . В состав зонвалов времени, измерителя длины смадируюшего комплекса входит также тываемого кабель-троса, измерителя угла блок 2 5 управления, вход которого соеотклонения кабель-троса от поперечной динен с выходом приемника-демодулятоплоскости судне соединены с входами ра 17, а выход подключен к шестому коммутатора бортовых измерителей, выход 55 входу коммутатора 19 бортовых измерений. которого соединен с магнитным регистратором. Работа зондирующего комплекса профиля скорости течения осуществляется слеНа черте «е изображена схема преддуюшим образом, лагаемого комплекса. 792144 При погружении ого на выходе измерителя 1 гидростатического давления формируются временные интервалы, пропорциональные периоду импульсов первичного преобразователя давления (глубины 5 погружения), сигнал на выходе измерителя 2 угла азимута пропорционален отклонению измерительной базы, акустического измерителя 8 скорости ог плоскости магнитного меридиана. Сигналы *° на выходах измерителей 3 и 4 углов отклонс іия продольной оси корпуса от вертикали пропорциональны отклонению продольной оси корпуса зонда от вертикали в плоскостях, совпадающих с ^ измерительными базами акустических измерителей 8и 9 соответственно. Коммутатор 5 последовательно подключает в ы ходы измерителей 2—4 к преобразователю 6, на выходе которого формируются 20 разнесенные интервалы времени, пропорциональные перечисленным выше измеряемым величинам. Одновременно с парных выходов акустических измерителей 8 - Ю скорости течения снимаются временные ** • интервалы, соответствующие составляющим вектора скорости течения вдоль продольной и двух поперечных осей корпуса. Коммутатор 7 каналов последовательно подключает выходы измерителей 30 1-4 и 8 - Ю к входам счетчиков 1 1 и 12. При этом в течение сформированных на выходах коммутатора 7 каналов временных интервалов на входы счетчиков поступают импульсы генератора 1 3 опор- 35 ной частоты и в счетчиках записываются в виде дв'оичного кода числа, пропорциональные всем перечисленным выше и з меряемым величинам. Эти числа преобразуются в последовательный двоичный код *® преобразователем 14 и через модулятор 15 канала связи поступают в кабельтросовую линию связи с бортовой аппаратурой 16. Сигналы на выходе кабель-троса s формируются приемником-демодулятором 1 7 ^ и в виде слов в последовательном двоичном коде подаются На магнитный регистратор 18. Одновременно на выходе бортовых измерителей 2 0 - 2 4 в виде слов в последовательном двоичном коде форми- 50 руются числя, пропорциональные соответственно курсовому углу судна, изменению Координат судна временным интервалам, длине сматываемого кабель-троса, углу отклонения кабель-троса от поперечной 55 плоскости судна. Пауза между словами в двоичном кодо, поступающем по кабель— тросовой линии спязн, выделяется бло ком 25 управления, причем во время этой паузы формируются импульсы управу ления коммутатором бортовых измерителей 19, подключающим указанные выше измерительные каналы к входу магнитного регистратора таким образом, чтобы во .время паузы на магнитной ленте производилась запись информации измерителей 2 0 - 2 4 . Зарегистрированные величины перечисленных выше параметров позволяют после обработки на ЭЦВМ вычислить вертикальное распределение вектора скорости течения с учетом поправок, учитывающих такие факторы, как дрейф судна, снос прибора от борта судна, отклонение профильной оси зонда ог вертикали по слудеюшим соотношениям. 1. Составляющие вектора скорости дрейфа судна на меридэдан и параллель: лі дл ? л ^ ш ~ изменение координат судна в меридиональном и широтном наравлениях (измеритель 2 1 ) за время Д І , f (измеритель 2 2 ) . 2. Скорость скоса прибора от борта судна: где у с где Д0 - изменение длины сматываемого кабель-гроса зад-Ь^ время (измерители 2 2 и Р.З) : Д h - изменение глубины погруже1 ния прибора (измеритель і ) . Угол ориентации вектора скорости сноса прибора определяется по углу (| ^ отклонения кабель-троса от поперечной плоскости судна (измеритель 2 4 ) . 3 . Фактическая величина горизонтальной скорости течения по одной из измерительных осейCOS * где Vj( x o cos2tp ,V_ -Vz o cos2cf - измерительные скорости по горизонтальной и вертикальной осям, например измерители 8 и Ю; ф - угол отклонения продоль—* ной оси прибора от вертикали {измеритель 2). 0 792144 7 Анализ погрешности иомррения вертовой аппаратурой, выход которой через тикального распределиннл Lкпрогти течеприем ник-демодулятор подключен к входу ния с учетом погрєшнек і и измерения всех магнитного регистратора и к выходу коммутатора бортовых измерителей, причем перечисленных параметров показал, что один из его входов соединен с блоком, предлагаемый комплекс может обеспечить управления, подключенным к выходу измерение с абсолютной погрешностью приемника-демодулятора, а другой вход порядка 1—3 см/с. коммутатора бортовых измерителей соеИспользование зондирующего комплекдинен с выходом измерителя изменения си позволяет существенно повысить точкоординат судна по данным радионавиность измерения вертикального распредегационной системы, о т л и ч а юления скорости течения в океане. Это ш и й с я тем, что, с целью повышения достигается за счет измерения отклонения точности измерения, в него дополнительпродольной оси прибора от вертикальной но введены два измерителя углов отклосоставляющей скорости потока по пронения продольной оси корпуса от вертикадольной оси, длины сматываемого ка)5 ли, третий акустический измеритель, бабелі -троса и угла его отклонения от поза которого ориентирована по продольной перечной плоскости судна интервалов вреоси корпуса, измеритель курса судна, измени, что позволяет'получить поправки меритель интервалов времени, измеритель и учесть такие дєстабилизирукяпие факдлины сматываемого кабель-троса, изме20 торы, как скорость сноса прибора и отритель угла отклонения кабель-троса клонение поперечных измерительных осей от поперечной плоскости судна, причем от горизонтали при наклонах прибора. измерители углов отклонения продольной оси корпуса от вертикали через коммутатор, и преобразователь угол-временной Формула и з о б'р є т е н и я 25 интервал и парные выходы третьего акустического измерителя скорости подключеЗондирующий комплекс профиля сконы ко входу коммутатора каналов, а выростей течения, содержащий корпус, изходы измерителей курса судна, интервалов меритель гидростатического давления, времени, длины сматываемого кабель30 троса угла отклонения кабель-троса выход которого соединен с входом комf мутатора каналов, два акустических от поперечной плоскости судна соединены измерителя скорости течения, измерис входами коммутатора бортовых измерительные базы которых ориентиротелей, выход которого соединен с магнитваны перпендикулярно продольной оси ным регистратором. корпуса, а парные выходы соединены 35 соответственно со входами коммутатора каналов измеритель угла азимута, Источники информации, подключенный к входу коммутатора, выпринятые во внимание при экспертизе ход которого через преобразователь угол1. Патент Франции . Ь 2271578, М временной интервал соединен со вхо- 40 кл. G, 0 1 Р 5/00, 1976. дом коммутатора каналов, два выхода ко2. Патент Японии № 52-55180, торого подключены к первым входам двух кл. Щ А-< , 1977. счетчиков, ко вторым вентильным входам 3. Шевцов В. П. и др. О методике которых подключен генератор опорной исследования вертикальной структуры частоты, а выходы счетчиков через пре- 45 морских течений с борта судна. Океаобразователь кода и модулятор связи нология, т. ХІН , вып. 6, 1973, с . 1 1 0 8 соединены кабелътросовой линией с бор1113 (пртотип). 792X44 11 15 12 J Iff І І 10 го гі 23 22 13 17 25 18 Редактор Т. Горячева Составитель В. Назарова Техред И.Асталош Корректор М. Демчик Заказ 10143/43 Тираж 1019 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35 , Раушская, наб., п. 4/5 Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюProbing complex for profile of flow velocity
Автори англійськоюKushnir Volodymyr Moiseiovych, Koltakov Yurii Mykolaiovych
Назва патенту російськоюЗондирующий комплекс профиля скорости течения
Автори російськоюКушнир Владимир Моисеевич, Колтаков Юрий Николаевич
МПК / Мітки
МПК: G01P 5/00
Мітки: швидкості, зондуючий, течії, комплекс, профілю
Код посилання
<a href="https://ua.patents.su/6-14172-zonduyuchijj-kompleks-profilyu-shvidkosti-techi.html" target="_blank" rel="follow" title="База патентів України">Зондуючий комплекс профілю швидкості течії</a>
Градієнтометричний зондуючий комплекс
Номер патенту: 10005
Опубліковано: 30.09.1996
Автори: Васьковцов Андрій Петрович, Кузнецова Алла Дмитрійовна, Зорі Анатолій Анатолійович
Мітки: комплекс, зондуючий, градієнтометричний
Формула / Реферат:
(57) Градиентометрический зондирующийкомплекс, содержащий погружаемое устройство с основным и дополнительным датчиками гидрофизического параметра, датчик давления, три измерительно-усилительных блока, два аналого-цифровых преобразователя, разностный усилитель, генератор импульсов, память разности, элемент "И", ключ Измеритель, причем выходы датчиков соединены со входами измерительно-усилительных блоков, выходы первого и второго...
Акустичний вимірювач швидкості течії
Номер патенту: 14174
Опубліковано: 25.04.1997
Автори: Колтаков Юрій Миколайович, Кушнір Володимир Мойсейович
МПК: B81B 7/00
Мітки: вимірювач, течії, швидкості, акустичний
Формула / Реферат:
Акустический измеритель скорости течения, содержащий первый акустический преобразователь, выход которого соединен через первый приемник с первым входом второй схемы И, а через первый передатчик с выходом первой схемы ИЛИ, с входом первого счетчика и с С-входом первого D-триггера, выход которого подключен к второму входу третьей схемы И, первый вход которой соединен с вторым входом четвертой схемы И и с выходом генератора опорной частоты,...
Пристрій контролю швидкості транспортуючого органу

Номер патенту: 5200
Опубліковано: 28.12.1994
Автори: Тараненко Валерій Олександрович, Стрекалова Леонора Олександрівна, Тимошенко Леонід Іванович, Стаднік Микола Іванович, Мезніков Артур Володимирович
МПК: B65G 43/04
Мітки: транспортуючого, швидкості, органу, контролю, пристрій
Формула / Реферат:
(57) Устройство контроля скорости транспортирующего органа, содержащее датчики скорости ленты и барабана, реле управления, блок индикации и блок выходных реле, отличающееся тем, что оно снабжено модулем программного управления, преобразователем сигнала, делителем, двумя генераторами опорных частот и двумя коммутаторами, причем датчики скорости ленты и барабана соединены соответствен но с первым и вторым входами преобразователя сигнала, первый...
Сигналізатор граничної швидкості обертання валу
Номер патенту: 1333
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01P 3/42
Мітки: сигналізатор, валу, граничної, обертання, швидкості
Формула / Реферат:
Сигнализатор предельной скорости вращения вала, содержащий первый формирователь импульсов, сигнализатор, коммутатор, переключатель, генератор тактовых импульсов, программный блок, первый и второй счетчики импульсов, формирователь запрещающего сигнала, второй формирователь, первый триггер, второй триггер и первый и второй элементы И, причем вход первого формирователя импульсов соединен с входом устройства, а выход — с входом сигнализатора...
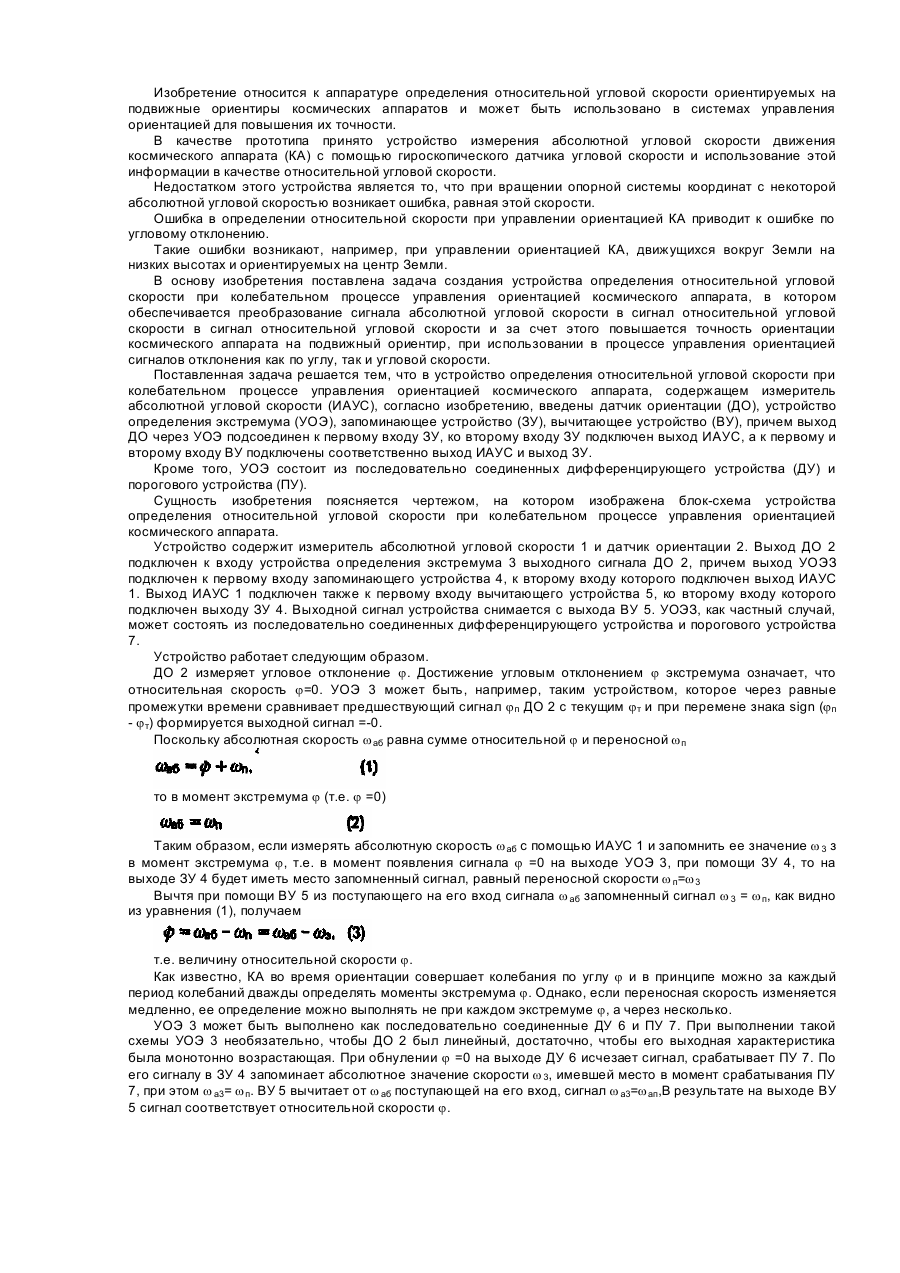
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Павловський Михайло Антонович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: відносної, кутової, пристрій, швидкості, орієнтацією, управління, космічного, коливальному, апарата, процесі, визначення
Формула / Реферат:
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Попередній патент: Пристрій для виготовлення секцій рулонних конденсаторів
Наступний патент: Пристрій для виміру температури
Випадковий патент: Спускний космічний апарат