Пристрій контролю швидкості транспортуючого органу
Номер патенту: 5200
Опубліковано: 28.12.1994
Автори: Стрекалова Леонора Олександрівна, Мезніков Артур Володимирович, Тараненко Валерій Олександрович, Тимошенко Леонід Іванович, Стаднік Микола Іванович

Формула / Реферат
(57) Устройство контроля скорости транспортирующего органа, содержащее датчики скорости ленты и барабана, реле управления, блок индикации и блок выходных реле, отличающееся тем, что оно снабжено модулем программного управления, преобразователем сигнала, делителем, двумя генераторами опорных частот и двумя коммутаторами, причем датчики скорости ленты и барабана соединены соответствен но с первым и вторым входами преобразователя сигнала, первый выход которого соединен с первым входом первого комму татора, второй - с первым входом второго коммутатора, а третий через делитель соединен со вторым входом первого коммутатора и со входами обоих генераторов опорной частоты, выходы которых соединены соответственно со вторым и треть им входами второго коммутатора, реле управления подключено к четвертому входу второго коммутатора, выходы обоих коммутаторов соединены со входами моду ля программного управления, первый и второй выходы которого соединены с блоками индикации и выходных реле, третий выход подключен к пятому входу второго коммутатора и третьему входу преобразователя сигнала, четвертый выход подключен к шестому входу второго коммутатора и четвертому входу преобразователя сигнала, а пятый выход - к третьему входу первого коммутатора и седьмому входу второго комму татора.
Текст
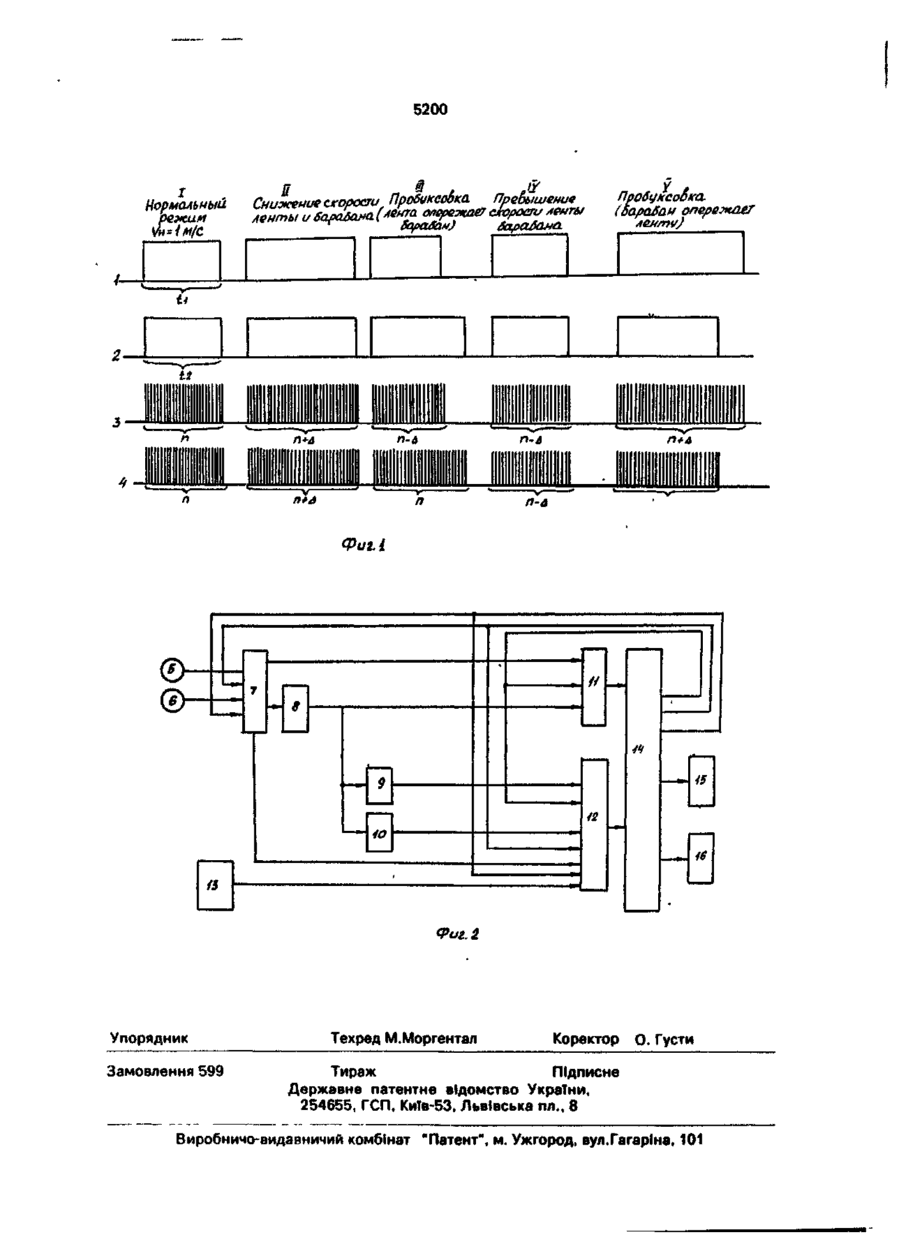
Устройство контроля скорости транспортирующего органа, содержащее датчики Изобретение относится к контролю скорости тяговых органов фшин в частности скорости!движения шахтнЩ ъ ленточных конвейеро ЯЛ скорости ленты и барабана, реле управления, блок индикации и блок выходных реле, о т л и ч а ю щ е е с я тем, что оно снабжено модулем программного управления, преобразователем сигнала, делителем, двумя генераторами опорных частот и двумя коммутаторами, причем датчики скорости ленты и барабана соединены соответственно с первым и вторым входами преобразователя сигнала, первый выход которого соединен с первым входом первого коммутатора, второй - с первым входом второго коммутатора, а третий через делитель соединен со вторым входом первого коммутатора и со входами обоих генераторов опорной частоты, выходы которых соединены соответственно со вторым и третьим входами второго коммутатора, реле управления подключено к четвертому входу второго коммутатора, выходы обоих коммутаторов соединены со входами модуля программного управления, первый и второй выходы которого соединены с блоками индикации и выходных реле, третий выход подключен к пятому входу второго коммутатора и третьему входу преобразователя сигнала, четвертый выход подключен к шестому входу второго коммутатора и четвертому входу преобразователя сигнала, а пятый выход - к третьему входу первого коммутатора и седьмому входу второго коммутатора. Наиболее близким по технической сущк заявляемому является устройство, исгіользующее прямой счет импульсов, подступающих с датчика скорости. Устройство С > сл о о О 5200 содержит датчики скорости ленты и барабарости ленты (барабана), кроме того, необхона, реле управления, блок индикации, блок димая точность задается числом импульсов, выходных реле, задатчик эталонного времеформирующимся данным генератором. Отни. клонение скорости„от номинального значеОднако устройство имеет низкую точ- 5 ния определяется по формуле ность и длительное время счета, т. к. в основу его работы положен принцип контроля Ут-Ун х 100%, У% = числа импульсов за эталонный промежуток Ун времени, что при существующих датчиках скорости не удовлетворяет предъявляемым 10 где Ун - эталонное число импульсов для нок нему требованиям, поскольку для увеличеминального значения скорости; ния точности контроля необходимо увеличиУт - измеренное число импульсов для вать число импульсов за один цикл счета, а текущего значения скорости; для уменьшения времени счета - уменьV% - процентное отклонение скорости. шить. 15 На фиг. 1 показан принцип функционирования устройства при различных варианВ основу изобретения поставлена задатах отклонения параметров скорости; на ча создания устройства контроля скорости фиг. 2 представлена структурная схема транспортирующего органа, в котором пупредложенного устройства. тем увеличения числа импульсов за один цикл счета и за счет частоты обеспечивается 20 На фиг. 1 : 1 - время контроля скорости повышение точности контроля параметров ленты, 2 - время контроля скорости приводскорости при использовании современных ного барабана, 3 - заполняющие высокочадатчиков. стотные импульсы генератора опорной частоты датчика скорости ленты, 4 - заполПоставленная задача решается тем, что устройство, включающее датчик скорости 25 няющие высокочастотные импульсы генератора опорной частоты датчика скорости ленты и барабана, реле управления, блок барабана. индикации и блок выходных реле, согласно изобретению, снабжемо модулем программНа фиг. 2 : 5 - датчик скорости ленты, 6 ного управления, преобразователем сигнадатчик скорости барабана, 7 - преобразовала, делителем, двумя генераторами опорных 30 тель сигнала, 8 - первый коммутатор, 9 частот и двумя коммутаторами, причем датвторой коммутатор, -10 - делитель, 11 - генечики скорости ленты и барабана соединены ратор опорной частоты, 12 - генератор опорсоответственно с первым и вторым входами ной частоты, 13 - реле управления, 14 преобразователя сигнала, первый вход комодуль программного управления, 15 - блок торого соединен с первым входом первого 35 индикации, 16 - блок выходных реле. коммутатора, а второй - с первым входом Устройство, включающее датчики скоровторого коммутатора, а третий через делисти ленты 5 и барабана б, реле управления тель соединен со вторым входом первого 13, блок индикации 15 и блок выходных реле коммутатора и со входами обоих генерато16, снабжено модулем программного управров опорных частот, выходы которых соеди- 40 ления 14, преобразователем сигнала 7, денены соответственно со вторым и лителем 10, двумя генераторами опорных третьим входами второго коммутатора, частот 11, 12 и двумя коммутаторами 8, 9, реле управления подключено к четвертопричем датчики скорости ленты 5 и барабана му входу второго коммутатора, выходы обо6 соединены соответственно с первым и втоих коммутаторов соединены с входами 45 рым входами преобразователя сигнала 7, модуля программного управления, первый и первый выход которого соединен с первым второй выходы которого соединены с блокавходом первого коммутатора 8, а второй - с ми индикации и выходных реле, третий выпервым входом второго коммутатора 9, а ход подключен к пятому входу второго третий через делитель 10 соединен со втокоммутатора и третьему входу преобразова- 50 рым входом первого коммутатора 8 и со вхотеля сигнала, четвертый выход подключен к дами обоих генераторов опорной частоты шестому входу второго коммутатора и чет11, 12, выходы которых соединены соответвертому входу преобразователя сигнала, а ственно со вторым и третьим входами второпятый выход - к третьему входу первого комго коммутатора 9, реле управления 13 мутатора и седьмому входу второго комму- 55 подключено к четвертому входу второго комтатора. мутатора 9, выходы обоих коммутаторов соединены с входами модуля программного В предлагаемом устройстве используетуправления 14, первый и второй выходы кося способ контроля скорости, в котором за торого соединены с блоками индикации 15 и эталон принимается число импульсов геневыходных реле 16, третий выход подключен ратора, соответствующее номинальной ско 5200 к пятому входу второго коммутатора 9 и ляет работой преобразователя сигналов 7 и третьему входу преобразователя сигнала 7, коммутаторов 8, 9, а также индицирует вычетвертый выход подключен к шестому вхочисленные значения в цифровом виде на ду второго коммутатора 9 и четвертому вхо- • блоке индикации 15 и управляет объектом с ду преобразователя сигнала 7, а пятый 5 помощью блока выходных реле 16. выход - к третьему входу первого коммутаПри контроле скорости конвейера в петора 8 и седьмому входу второго коммутаториод разгона или при поиске скорости 0,5 ра 9. м/с для управления тормозом, измерение скорости производится по одному импульсу Устройство работает следующим образом. 10 датчика скорости. В этом случае сигнал датДатчики скорости 5 и 8 генерируют сигчика скорости поступает непосредственно налы, частота которых пропорциональна на первый вход коммутатора 8, что сокращаскорости движения ленты для первого из ет время измерения. них и скорости вращения приводного бараТаким образом, при контроле скорости бана для второго. 15 на основании задания временной установки Преобразователь 7 формирует сигнал на отключение и требуемой точности контдатчика и выдает его на входы первого 8 и роля скорости, принимается число высоковторого 9 коммутаторов, а также на делитель частотных импульсов, генерируемых в 10, который выделяет необходимое количество импульсов датчика скорости. При появ- 20 процессе измерения. При вращении датчика скорости им выделяется определенное числении импульса на выходе делителя 10 ло импульсов, зависящее от скорости его запускаются генераторы опорных частот 11 вращения, в течение которых формируются и 12. На выходах второго коммутатора 9, к высокочастотные импульсы, поступающие в которым подключены выходы генераторов опорных частот 11, 12, появляются высоко- 25 модуль 14 программного управления. Допустим, что при номинальной скорости в норчастотные импульсы, поступающие на вход мальном режиме вращения датчика модуля 14 программного управления для поскорости число генерируемых высокочастотследующего вычисления отклонения параных импульсов равно N, тогда при уменьшеметров скорости от номинальных значений. К входу второго коммутатора 9 подключе- 30 нии скорости их число увеличится на Д т. к. время счета увеличится, а частота высокочано реле управления 13, предназначенное для стотных импульсов останется прежней. При технологической блокировки устройства. увеличении скорости число импульсов Выходы коммутаторов 8 и 9 соединены уменьшится на Л Таким образом, Л - велисо входами модуля программного управления 14, который производит счет импульсов 35 чина (относительная) отклонения скорости от номинального значения. Пробуксовка датчика скорости, сравнивает с эталонным ленты относительно приводного барабана числом, соответствующим номинальной скоопределяется как разность числа импульсов рости ленты или барабана, вычисляет пропринятых за время контроля скорости ленты цент пробуксовки и отклонения скорости ленты от ее номинального значения, управ- 40 и барабана. 5200 ПробуксоЬка барабан) ун=1м/С барабана. П-6 п-а п+а Пробуксобка. (барабан опережает лемті/J ПреЬь /7 П+А п-а Фиг. і 8 42 46 /з ФигЛ Упорядник Замовлення 599 Техред М.Моргентал Коректор О. Густи Тираж Підписне Державне патентне відомство України, 254655, ГСП, КиТв-53, Львівська пл., 8 Виробничо-видавничий комбінат "Патент", м. Ужгород, вул.ГагарІна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for speed control of a transporting body
Автори англійськоюMeznikov Artur Volodymyrovych, Stadnyk Mykola Ivanovych, Strekalova Leonora Oleksandrivna, Taranenko Valerii Oleksandrovych, Tymoshenko Leonid Ivanovych
Назва патенту російськоюУстройство контроля скорости транспортирующего органа
Автори російськоюМезников Артур Владимирович, Стадник Николай Иванович, Стрекалова Леонора Александровна, Тараненко Валерий Александрович, Тимошенко Леонид Иванович
МПК / Мітки
МПК: B65G 43/04
Мітки: транспортуючого, швидкості, контролю, органу, пристрій
Код посилання
<a href="https://ua.patents.su/4-5200-pristrijj-kontrolyu-shvidkosti-transportuyuchogo-organu.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю швидкості транспортуючого органу</a>
Сигналізатор граничної швидкості обертання валу
Номер патенту: 1333
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01P 3/42
Мітки: сигналізатор, швидкості, обертання, граничної, валу
Формула / Реферат:
Сигнализатор предельной скорости вращения вала, содержащий первый формирователь импульсов, сигнализатор, коммутатор, переключатель, генератор тактовых импульсов, программный блок, первый и второй счетчики импульсов, формирователь запрещающего сигнала, второй формирователь, первый триггер, второй триггер и первый и второй элементы И, причем вход первого формирователя импульсов соединен с входом устройства, а выход — с входом сигнализатора...
Перетворювач швидкості переміщення в код
Номер патенту: 3223
Опубліковано: 26.12.1994
Автори: Данілов Ніколай Алєксєєвіч, Брезе Євген Юрійович
МПК: H03M 1/50
Мітки: код, швидкості, перетворювач, переміщення
Формула / Реферат:
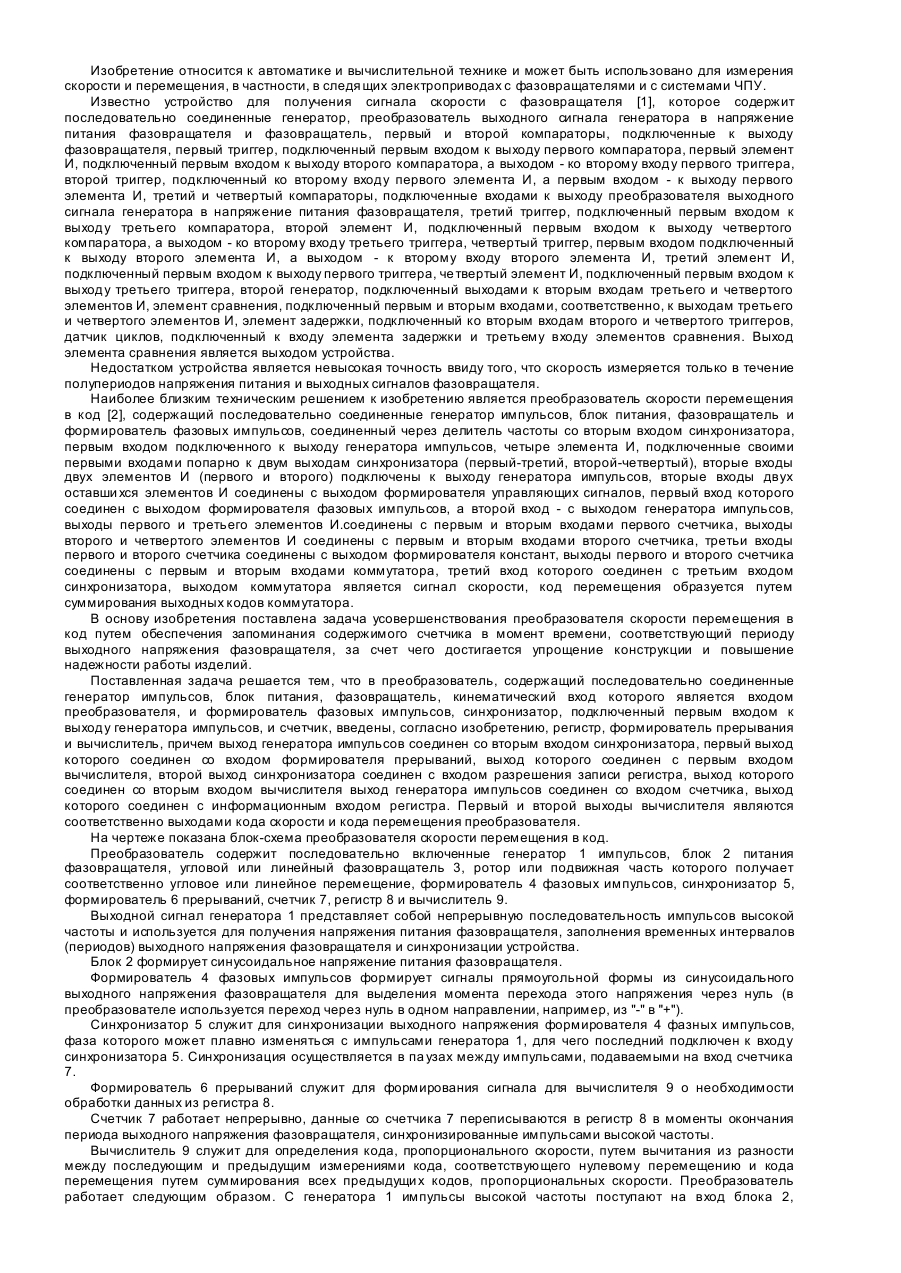
Преобразователь скорости перемещения в код, содержащий последовательно соединенные генератор импульсов, блок питания, фазовращатель, кинематический вход которого является входом преобразователя, и формировать фазовых импульсов, синхронизатор, первый вход которого соединен с выходом генератора импульсов, и счетчик, отличающийся тем, что в него введены регистр, формирователь прерываний и вычислитель, причем выход генератора импульсов соединен...
Пристрій для контролю перевищення швидкості шахтної підйомної машини
Номер патенту: 4955
Опубліковано: 28.12.1994
Автори: Матвієнко Микола Павлович, Прохоренко Вадим Олександрович
МПК: B66B 5/04
Мітки: машини, контролю, шахтної, швидкості, пристрій, підйомної, перевищення
Формула / Реферат:
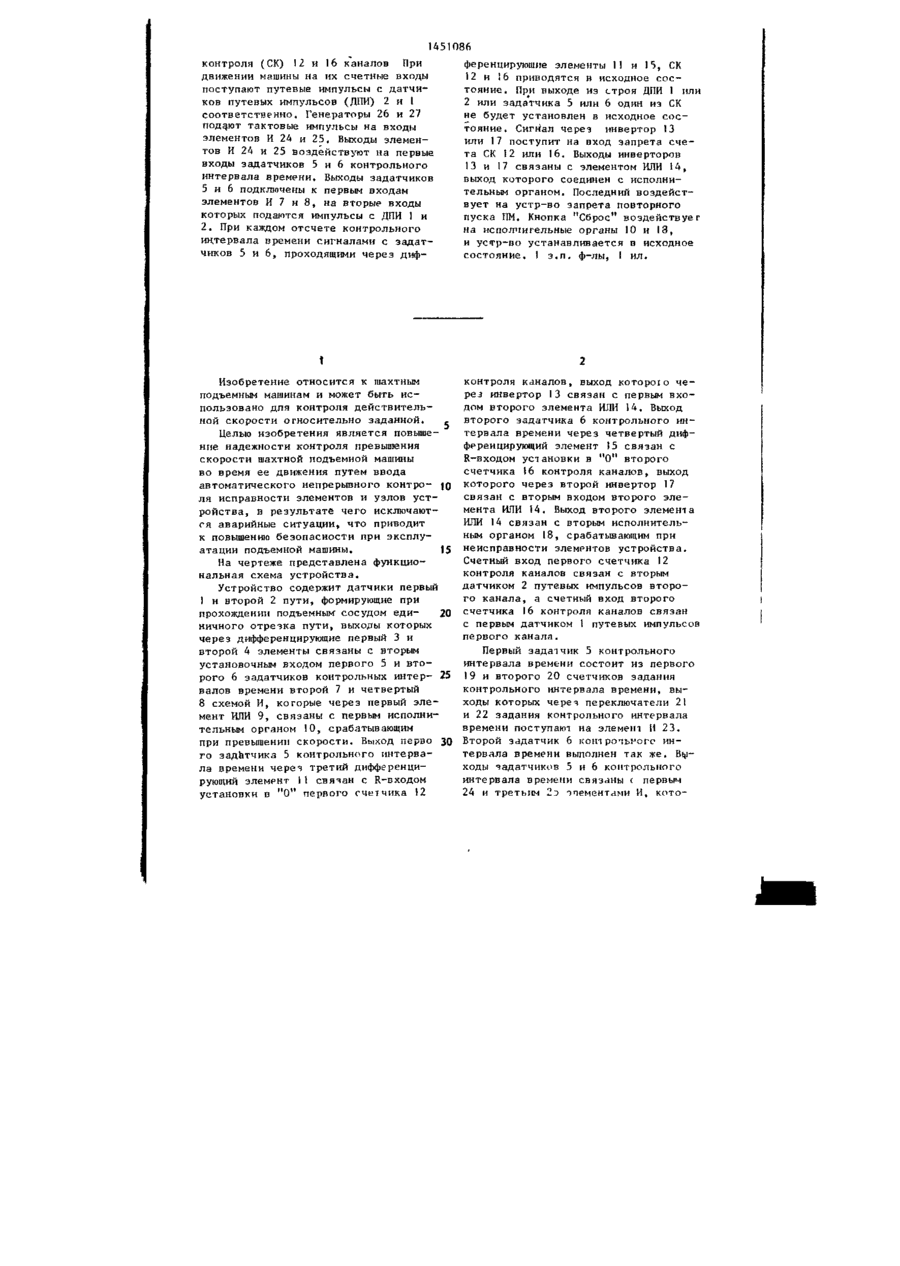
1. Устройство для контроля превышения скорости шахтной подъемной машины, содержащее первый генератор тактовых импульсов, выход которого подключен к первому входу первого элемента И, второй вход которого соединен с первым входом второго элемента И, второй вход которого подключен к выходу первого датчика пути и к входу первого дифференцирующего элемента, отличающееся тем, что, с целью повышения надежности, оно снабжено вторым датчиком и...
Пристрій для вимірювання швидкості переміщення
Номер патенту: 2063
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/42
Мітки: переміщення, пристрій, швидкості, вимірювання
Формула / Реферат:
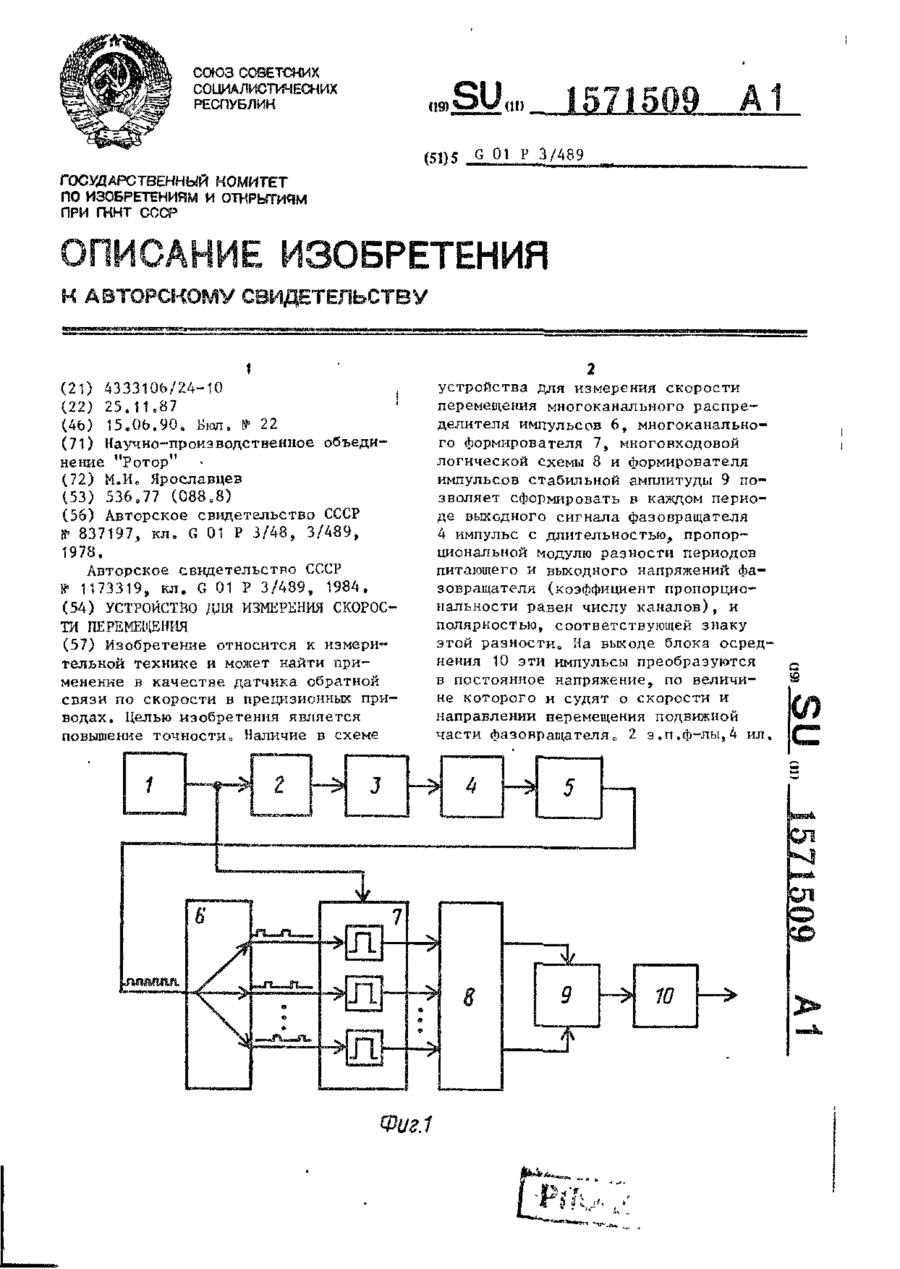
1. Устройство для измерения скорости перемещения, содержащее генератор эталонной частоты, делитель частоты и последовательно соединительные блок питания, фазовращатель, компаратор, многоканальный распределитель импульсов, многоканальный формирователь опорных импульсов, многовходовую логическую схему и блок осреднения, выход генератора эталонной частоты соединен с дополнительным входом многоканального формирователя опорных импульсов,...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 348
Опубліковано: 30.04.1993
Автори: Метельов Леонід Дмитрович, Шунайлов Генадій Олександрович, Морозов Микола Ібрагимович, Цибулько Вадим Йосипович, Квашин Михайло Федорович, Боярчук Володимир Кирилович
МПК: F01D 21/00
Мітки: контролю, максимального, осі, ротора, відхілення, турбомашині, пристрій
Формула / Реферат:
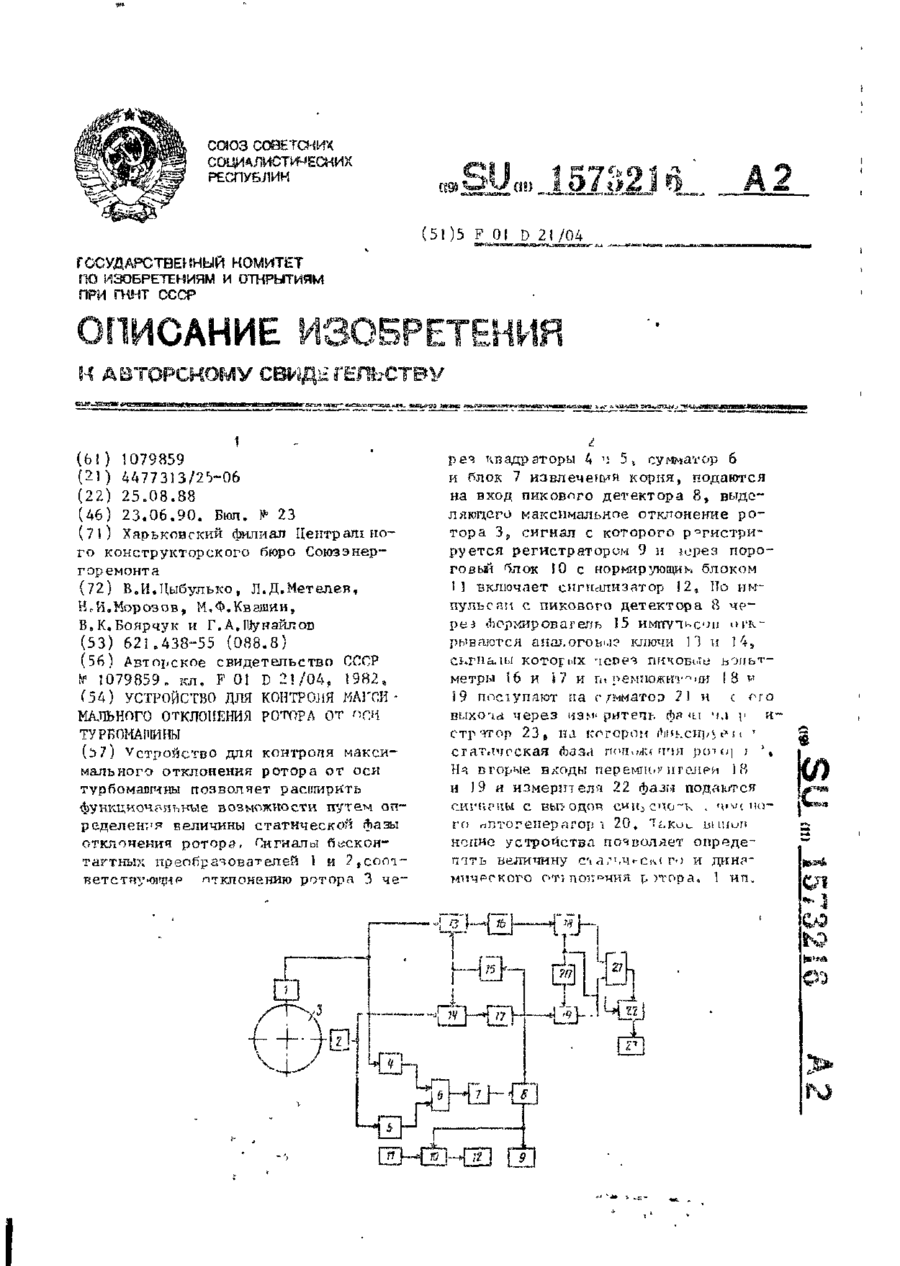
Устройство для контроля максимального отклонения ротора от оси турбомашины по авт. св. № 1079859, отличающееся тем, что, с целью расширения функциональных возможностей путем определения величины статической фазы отклонения ротора, оно дополнительно содержит первый и второй аналоговые ключи, формирователь импульсов, первый и второй пиковые вольтметры, первый и второй перемножители, опорный синусно-косинусный автогенератор, второй...
Попередній патент: Пристрій для замикання вогнепальної зброї
Наступний патент: Кукурудзозбиральна машина
Випадковий патент: Пристрій для дистанційного відстрілу зброї