Двокоординатна рлс
Номер патенту: 17452
Опубліковано: 06.05.1997
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
Формула / Реферат
Двухкоординатная РЛС, содержащая передающую систему периодических импульсных сигналов, приемник, антенный переключатель, и зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора с металлическим контррефлектором, отличающаяся тем, что передающая система выполнена из двух передатчиков: передатчика редких импульсов в виде периодической последовательности двух разнополярных видеоимпульсов длительностью t1 = 2d/c и периодом следования T1 > 2rm/c и передатчика частых импульсов в виде периодической последовательности видеоимпульсов чередующейся полярности наносекундной длительности t2 и периодом следования T2 = 2d/c, на выходе приемника установлены фильтр нижних частот с полосой пропускания 1/2 t1 и фильтр верхних частот с полосой пропускания от 1/2 T2 до 1/t2, выход фильтра нижних частот связан с измерителем времени запаздывания tз максимального редкого импульса эхо-сигнала относительно соответствующего зондирующего импульса, выход фильтра верхних частот связан с измерителем длительности частого импульса t эхо-сигнала, а выходы этих измерителей связаны с вычислителем дальности цели по соотношению
и азимутального угла цели из следующего уравнения
где t1, T1 - длительность и период следования зондирующих импульсов передатчика редких импульсов;
t2, T2 - длительность и период следования зондирующих импульсов передатчика редких импульсов;
d - расстояние от вибратора до контррефлектора;
c - скорость света;
rm - максимальная дальность обнаружения;
r - дальность цели;
b - азимутальный угол цели, относительно оси антенны;
tз - время запаздывания максимального редкого импульса эхо-сигнала относительно редкого зондирующего импульса;
n - номер гармонии спектра частых импульсов;
t - длительность частого импульса эхо-сигнала;
L - размер апертуры антенны;
lp - размер контррефлектора.
Текст
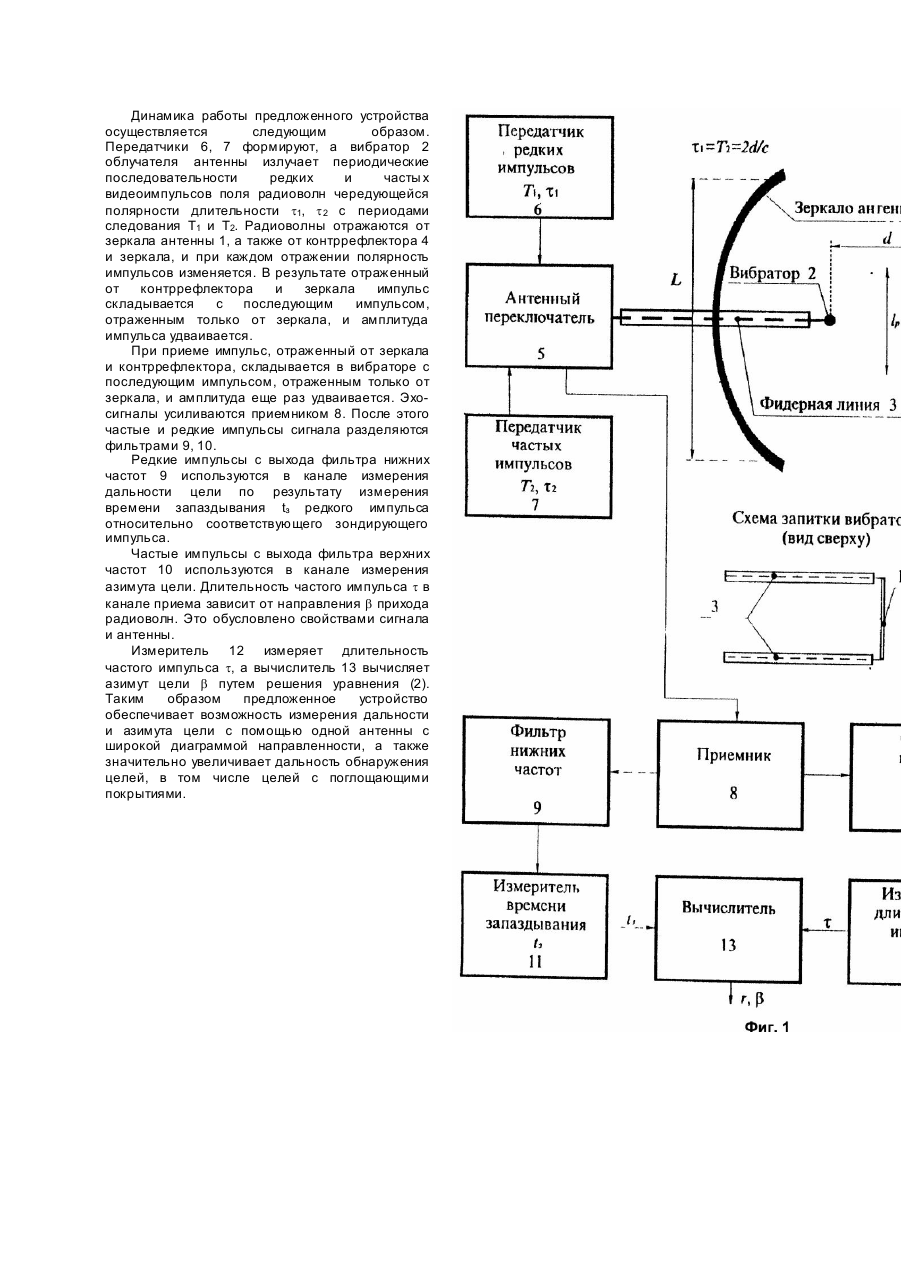
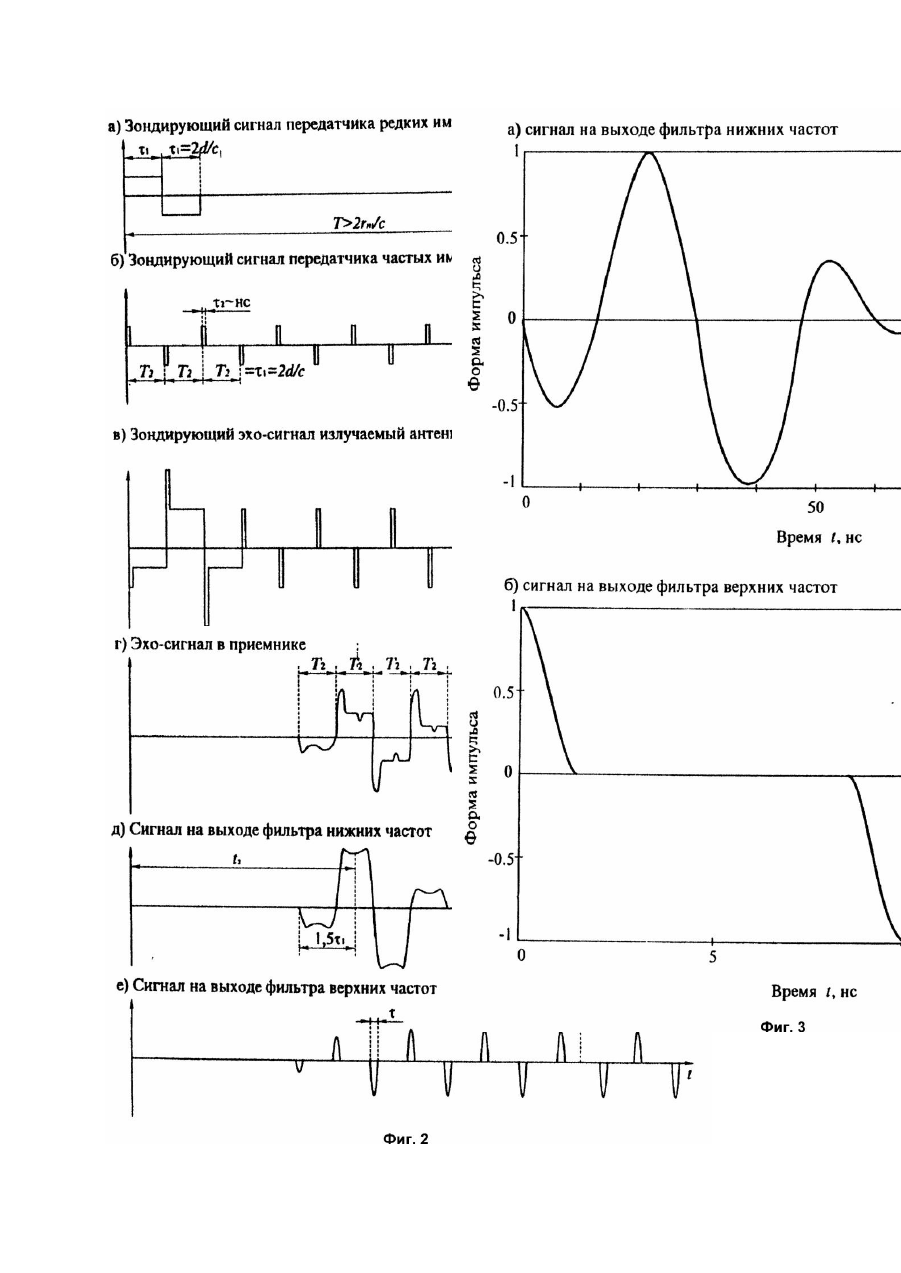
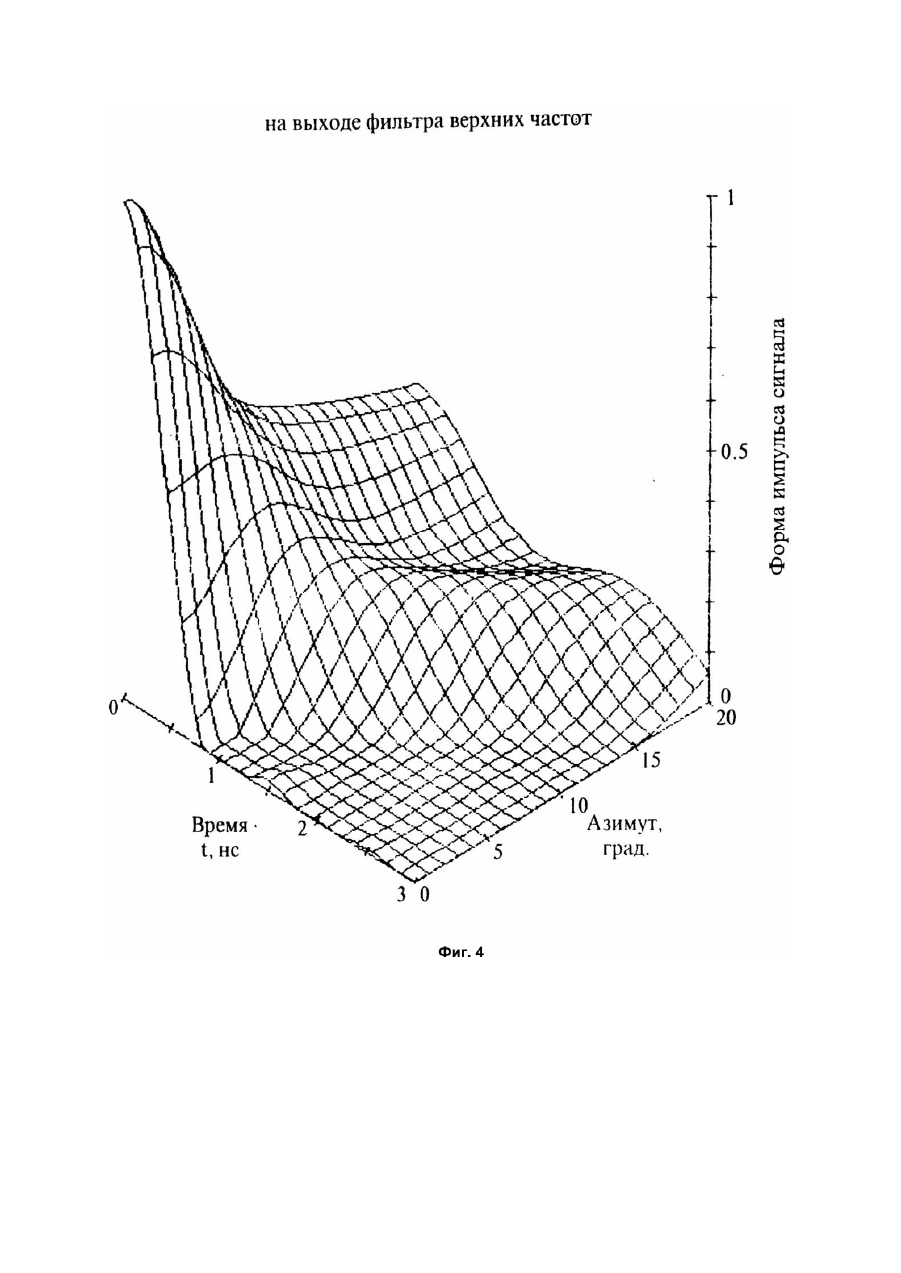
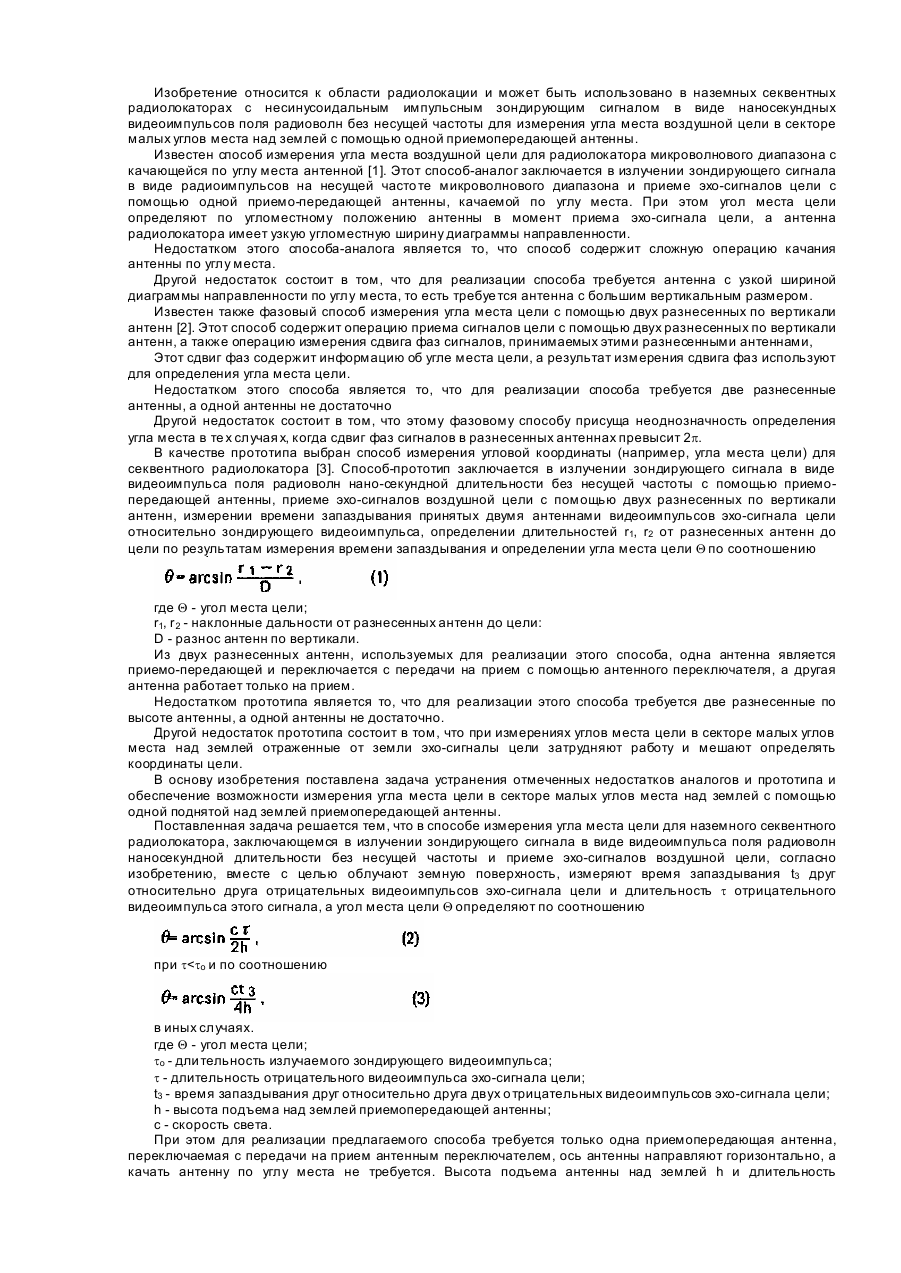
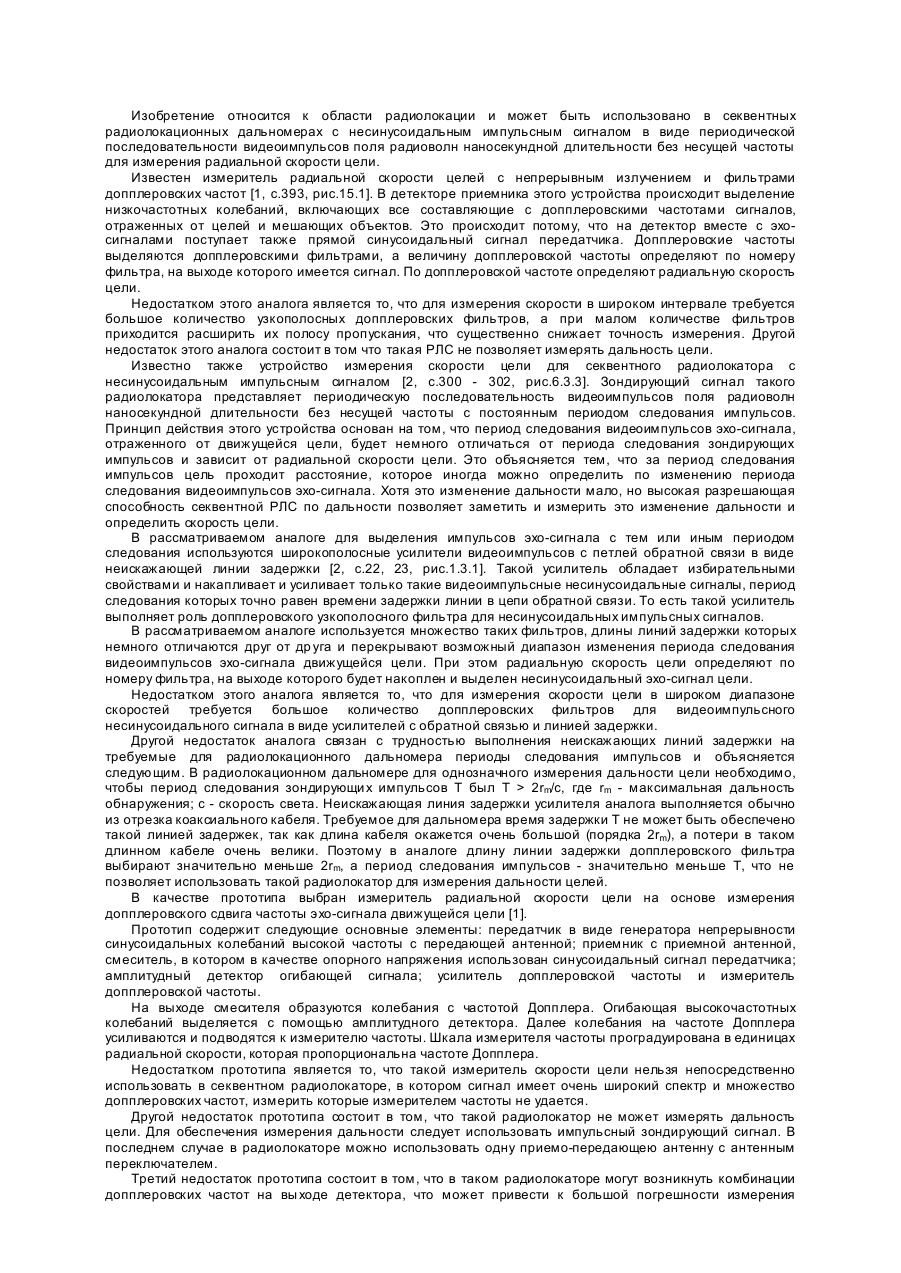
Изобретение относится к области радиолокации и может быть использовано при измерении дальности и азимута воздушных целей с помощью РЛС с несинусоидальным импульсным сигналом. Известна РЛС с несинусоидальным импульсным сигналом, которую можно использовать для измерения дальности и угловы х координат воздушных целей [1]. Этот аналог содержит разнесенную в пространстве антенную систему из двух или более антенн. Измерение угловой координаты в такой РЛС основано на измерении дальностей от разнесенных антенн до цели. В такой РЛС используют несинусоидальный импульсный сигнал наносекундной длительности в виде периодической последовательности импульсов. При этом период следования импульсов T обычно T > 2r m/c, где r m максимальная дальность обнаружения, c скорость света. Это ограничение на период следования импульсов обусловлено необходимостью обеспечения однозначного определения дальности по времени запаздывания импульса эхо-сигнала цели относительно зондирующего импульса. Недостатком этого аналога является то, что такая РЛС содержит две или более разнесенные антенны, то есть антенная система громоздка. В качестве прототипа выбрана импульсная РЛС, которую можно использовать для измерения дальности и азимута цели [2]. В состав прототипа входят следующие основные элементы: приемо-передающая антенна с переключателем "прием-передача", приемник, синхронизатор, индикаторное устройство и передатчик зондирующи х сигналов в виде периодической последовательности радиоимпульсов микросекундной длительности на несущей частоте микроволнового диапазона с периодом следования T > 2rm/c. Дальность r цели определяют по результату измерения времени запаздывания tз импульса эхо-сигнала относительно зондирующего импульса по соотношению r = ctз/2. Азимут цели в прототипе определяют путем вращения антенны с узкой диаграммой направленности по азимуту по положению антенны в момент приема максимального сигнала. В качестве антенны прототипа можно использовать, например, зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора, расположенного на фокальной оси зеркала [3]. Для того, чтобы такой облучатель не излучал энергию в противоположную от зеркала сторону, можно экранировать такое излучение с помощью контррефлектора в виде части проводящей цилиндрической поверхности, ось которой совпадает с осью вибратора. В дальнейшем будем условно полагать, что в прототипе использована такая зеркальная антенна. Недостатком прототипа является то, что для измерения азимута цели необходимо иметь антенну с узкой диаграммой направленности по азимуту, то есть требуется антенна с большим горизонтальным размером апертуры. Другой недостаток прототипа состоит в том, что такую громоздкую антенну необходимо вращать по азимуту. Третий недостаток прототипа заключается в том, что такая РЛС имеет малую дальность обнаружения целей, имеющих поглощающие покрытия, которые поглощают радиоволны на несущей часто те зондирующего сигнала. В основу изобретения поставлена задача устранения указанных недостатков прототипа и аналога и обеспечение возможности измерения азимута дальности цели с помощью одной неподвижной антенны с широкой диаграммой направленности, а также увеличение дальности обнаружения целей, в том числе и целей с поглощающими покрытиями. Поставленная задача решается тем, что в двухкоординатной РЛС, содержащей передающую систему периодических импульсных сигналов, приемник, антенный переключатель и зеркальную приемопередающую антенну типа параболический цилиндр с облучателем в виде вибратора с металлическим контррефлектором, согласно изобретению передающая система выполнена из двух передатчиков: передатчика редких импульсов в виде периодической последовательности двух разнополярных видеоимпульсов длительностью t = 2d/c и периодом следования T1 > 2rm/c и передатчика частых импульсов в виде периодической последовательности видеоимпульсов чередующейся полярности наносекундной длительности t2 с периодом следования T2 > 2d/c, на выходе приемника установлены фильтр нижних частот с полосой пропускания 1/2 t1 и фильтр верхних частот с полосой пропускания от 1/2T2 до 1/t2, выход фильтра нижних частот связан с измерителем времени запаздывания tз максимального редкого импульса эхо-сигнала относительно соответствующего зондирующего импульса, выход фильтра верхних частот связан с измерителем длительности t частого импульса эхо-сигнала, а выходы эти х измерителей связаны с вычислителем дальности цели r по соотношению и азимутального уравнения угла цели b из следующего где t1, T1 - длительность и период следования зондирующи х импульсов передатчика редких импульсов; t2, T 2 - длительность и период следования зондирующи х импульсов передатчика редких импульсов; d расстояние от вибратора до контррефлектора; c - скорость света; rm - максимальная дальность обнаружения; r - дальность цели; b - азимутальный угол цели, относительно оси антенны; tз - время запаздывания максимального редкого импульса эхо-сигнала относительно редкого зондирующего импульса; n - номер гармонии спектра частых импульсов; t - длительность частого импульса эхосигнала; L - размер апертуры антенны; lp - размер контррефлектора. Техническая сущность и принцип действия предложенного устройства поясняются на фиг.1 4. На фиг.1 представлена упрощенная структурная схема предложенной двухкоординатной РЛС и схематически показаны эскиз антенны и схема запитки вибратора облучателя фидерной линией (вид сверху). На фиг.2 условно показаны упрощенные эпюры зондирующи х сигналов передатчиков и антенны, а также эпюры эхо-сигналов в приемнике и на выходе фильтров. На фиг.3 представлены расчетные формы редких и частых импульсов сигнала на выходе фильтров низких и верхни х частот. На фиг.4 представлена зависимость формы частого импульса от азимутального угла. В состав предложенного устройства на фиг.1 входят следующие основные элементы: зеркало антенны 1 в виде проводящего параболического цилиндра; вибратор 2 облучателя антенны длиной l 2r m/c; передатчик частых импульсов 7 длительностью t2 порядка 1 не и менее без несущей частоты с периодом следования T2 = 2d/c; приемник 8; фильтр нижних частот 9, выделяющий редкие импульсы эхо-сигнала; фильтр верхних частот 10, выделяющий частые импульсы эхо-сигнала; измеритель 11 времени запаздывания tз максимального редкого импульса эхо-сигнала относительно редкого зондирующего импульса; измеритель 12 длительности частого импульса эхо-сигнала; вычислитель 13, вычисляющий дальность r и азимутальный угол цели b по соотношениям (1), (2). В состав предложенного устройства входят также синхронизатор и индикатор, которые аналогичны соответствующим устройствам прототипа и не показаны на фиг.1. Принцип действия предложенного устройства поясняется следующим. Передатчик 6 формирует, а вибратор 2 излучает периодическую последовательность двух разнополярных видеоимпульсов поля радиоволн без несущей частоты длительностью t1 = 2d/c периодом следования T1 > 2r m/c как показано на фиг.2а. Каждый из этих импульсов отражается от зеркала 1 и контррефлектора 4 и зеркала, а при каждом отражении полярность импульса изменяется. Так как t1 = 2d/c, то отраженный от контррефлектора импульс будет складываться со вторым отрицательным импульсом вибратора, а амплитуда этого импульса возрастет вдвое. В результате антенна излучит не два, а три редких импульса. Аналогичный процесс происходит при излучении частых импульсов показанных на эпюре 2б, амплитуда которых также удваивается, а суммарный излучаемый антенной зондирующий сигнал будет выглядеть примерно так, как показано на эпюре фиг.2в. Зондирующие сигналы отражаются от цели, изменяют полярность и возвращаются к антенне. При приеме сигналов также происходит сложение в вибраторе импульсов, отраженных от зеркала и от зеркала и контррефлектора, а амплитуда импульсов еще раз дополнительно удваивается и эхо-сигнал на входе приемника будет выглядеть примерно так, как показано на эпюре фиг.2г. Таким образом, предложенное техническое решение и специальная конструкция антенны обеспечивает четырехкратное увеличение амплитуде часты х импульсов и трехкратное - для редких импульсов. Это улучшает отношение сигнал/шум в приемном канале и значительно увеличивает дальность обнаружения по сравнению с идентичной РЛС с такой же антенной, но иным расстоянием d от вибратора до контррефлектора или иными характеристиками зондирующи х сигналов. Фильтры 9, 10 на выходе приемника 8 разделяют редкие и частые импульсы эхо-сигнала. Параметры зондирующи х сигналов выбраны таким образом, что спектры редких и частых эхо-сигналов почти не перекрываются и их можно разделить с помощью фильтров с предложенными полосами пропускания. В результате такого разделения сигналы на выходе фильтров 9, 10 нижних и верхних часто т будут выглядеть примерно так, как показано на эпюрах фиг.2д, е. Разделение редких и частых импульсов необходимо для того, чтобы частые более интенсивные импульсы не мешали измерять время запаздывания tз редких импульсов в канале измерения дальности, а редкие импульсы не мешали измерять длительность t частых импульсов в канале измерения азимута. Фильтры 9, 10 обеспечивают эффективное разделение редких и частых импульсов. Это можно видеть из расчетных графиков на фиг.3а, б, на которых представлены формы редких а) и частых б) импульсов сигналов на выходе фильтров нижних и верхних частот. Эти расчеты проведены при следующих значениях исходных параметров; t2 = 1нс; L = 3м; d = 1,5м; lp = 0,8м; T2 = t 1 = 2d/c = 10нс; T1 = 1нс; b = 5°; r = 100км. Слабые редкие импульсы почти не мешают измерять длительность интенсивных частых импульсов, поэтому нижнюю границу полосы фильтра верхних частот следует взять равной 1/2 T2, тогда практически весь спектр частых импульсов попадает в полосу пропускания и длительность частых импульсов не будет искажена фильтром. Однако нельзя допустить, чтобы интенсивные частые импульсы попали в фильтр нижних частот, так как на их фоне будет тр удно обнаружить слабые редкие импульсы. Поэтому следует несколько сузить полосу пропускания фильтра нижних частот и взять верхнюю границу этой полосы равной 1/2t1. Такое сужение полосы несколько увеличивает длительность редких импульсов и уровень их боковых лепестков, но практически не изменяет время запаздывания tз. Такое решение обеспечивает возможность измерения дальности. Отсчет времени на фиг.3а ведется от начала первого редкого импульса эхо-сигнала, а на фиг.3б - от середины частого импульса. Физический смысл соотношения (1) для расчета дальности цели r с помощью вычислителя 13 ясен из рисунка на фиг.2д. Передатчик 7 формирует, а вибратор 2 излучает периодическую последовательность частых зондирующи х импульсов наносекундной длительности t2 ~ 1нс и менее с периодом следования T2 = 2d/c. Такой сигнал можно представить рядом Фурье в следующем виде где E(t) - напряженность электрического поля радиоволн частых импульсов, излучаемых вибратором облучателя антенны; t - время; Eo коэффициент, обратно пропорциональный дальности и одинаковый для всех гармоник; а другие обозначения были пояснены выше. В соотношении (3) спектр сигнала бесконечен. Однако реальные сигналы всегда имеют ограниченный спектр, определенный полосой пропускания передающей и приемной систем РЛС. Условно будем полагать, что полоса пропускания приемника равна 1/t2, тогда бесконечный верхний предел суммы в (3) следует заменить на величину T2/t 2. Из выражения (3) можно получить соотношение для напряжения эхо-сигнала частых импульсов на входе приемника РЛС. Для этого следует каждую гармонику в (3) умножить на квадрат диаграммы направленности антенны. Напряжение эхосигнала частых импульсов U(t) на входе приемника РЛС будет где r - дальность цели; sц - эффективная отражающая поверхность цели; A - коэффициент, не зависящий от направленных свойств антенны; t - время, отсчитываемое от середины частого импульса; b - азимут цели, а другие обозначения были пояснены выше. Расчеты по формуле (4) показали, что длительность частого импульса эхо-сигнала t существенно зависит от угловой координаты цели b. Это можно видеть из графика на фиг.4, где представлена расчетная зависимость формы частого импульса на выходе фильтра верхни х частот от азимута цели b. Расчет выполнен для тех же параметров антенны, что и на фиг.3. Из фиг.4 видно, что в секторе ±15° длительность частого импульса эхо-сигнала t увеличивается почти в пять раз и возрастает с увеличением угла b. Такие значительные изменения длительности частого импульса можно заметить, измерить и использовать для определения азимута цели b. Первый нуль кривой формы частого импульса соответствует времени t = t/2. Подставляя это значение времени в (4), учитывая, что при любых n, и приравнивая U(t) к нулю, получим трансцендентное уравнение (2), которое рекомендуется использовать для определения азимута цели b по результату измерения длительности частого импульса эхо-сигнала t. Следует иметь в виду, что результат определения азимутального угла b по соотношению (2) имеет неопределенный знак. Поэтому требуе тся иметь дополнительную информацию о том, с какой стороны от оси антенны (справа или слева) находится цель. Если такая информация отсутствует, то ее можно получить следующим образом. После расчета b по формуле (2) поворачивают антенну по азимуту на этот угол в любую сторону. Если после этого длительность частого импульса эхо-сигнала уменьшится, то цель находится в этой стороне, а если возрастет то в противоположной стороне. В предложенном устройство принципиально необходимо излучать несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты чередующейся полярности, так как используемые свойства таких сигналов изменять полярность при отражении и длительность частого импульса - в зависимости от направления присущи только таким коротким импульсам [1]. При этом редкие импульсы используются для однозначного измерения дальности, а частые - для определения азимута. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Антенна, передатчики 6, 7 и приемник 8 выполнены для излучения и приема сверхширокополосных импульсных сигналов наносекундной длительности без несущей частоты. Такие системы могут быть практически реализованы, так как физические основы и принципы построения таких систем известны и описаны в литературе [1]. Излучать редкие разнополярные импульсы можно, например, подводя к вибратору 2 по фидерной линии 3 с концов вибратора от передатчика 6 импульс тока треугольной формы длительностью 2t1. Излучать частые импульсы чередующейся полярности можно, например, подводя к вибратору от передатчика 7 разнополярные прямоугольные импульсы тока длительностью T2 = 2d/c с очень коротким фронтом импульса t2 ~ нс. Фидерная линия 3 выполнена из двух коаксиальных кабелей одинаковой длины. Сигнал подводится к вибратору с концов по внутренним жилам этих кабелей, а наружные оболочки этих кабелей служат для экранирования излучения фидерной линии, не являются несущими сигнал элементами и могут быть заземлены. Антенный переключатель 5 закорачивает вход приемника на время излучения зондирующего импульса. Фильтры 9, 10 и измерители 11, 12 имеют известную конструкцию. Вычислитель 13 представляет собой микроЭВМ для решения трансцендентного уравнения (2). Динамика работы предложенного устройства осуществляется следующим образом. Передатчики 6, 7 формируют, а вибратор 2 облучателя антенны излучает периодические последовательности редких и часты х видеоимпульсов поля радиоволн чередующейся полярности длительности t1, t 2 с периодами следования T1 и T2. Радиоволны отражаются от зеркала антенны 1, а также от контррефлектора 4 и зеркала, и при каждом отражении полярность импульсов изменяется. В результате отраженный от контррефлектора и зеркала импульс складывается с последующим импульсом, отраженным только от зеркала, и амплитуда импульса удваивается. При приеме импульс, отраженный от зеркала и контррефлектора, складывается в вибраторе с последующим импульсом, отраженным только от зеркала, и амплитуда еще раз удваивается. Эхосигналы усиливаются приемником 8. После этого частые и редкие импульсы сигнала разделяются фильтрами 9, 10. Редкие импульсы с выхода фильтра нижних частот 9 используются в канале измерения дальности цели по результату измерения времени запаздывания tз редкого импульса относительно соответствующего зондирующего импульса. Частые импульсы с выхода фильтра верхних частот 10 используются в канале измерения азимута цели. Длительность частого импульса t в канале приема зависит от направления b прихода радиоволн. Это обусловлено свойствами сигнала и антенны. Измеритель 12 измеряет длительность частого импульса t, а вычислитель 13 вычисляет азимут цели b путем решения уравнения (2). Таким образом предложенное устройство обеспечивает возможность измерения дальности и азимута цели с помощью одной антенны с широкой диаграммой направленности, а также значительно увеличивает дальность обнаружения целей, в том числе целей с поглощающими покрытиями.
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-coordinate radar station
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюДвухкоординатная рлс
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: рлс, двокоординатна
Код посилання
<a href="https://ua.patents.su/6-17452-dvokoordinatna-rls.html" target="_blank" rel="follow" title="База патентів України">Двокоординатна рлс</a>
Радіолокаційний імпульсний дальномір

Номер патенту: 17451
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: дальномір, радіолокаційний, імпульсний
Формула / Реферат:
Радиолокационный импульсный дальномер, содержащий передатчик импульсных зондирующих сигналов с периодом следования T1 > 2rm/c, приемо-передающую антенну с антенным переключателем, приемник, синхронизатор и индикатор, отличающийся тем, что антенна, приемник и передатчик выполнены для несинусоидальных импульсных сигналов наносекундной длительности t без несущей частоты в виде периодической пачки n таких импульсов с периодом T1 и периодом...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокатора, вимірювання, місця, кута, наземного, цілі, секвентного, спосіб
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Вимірювач швидкості цілі для секвентного радіолокатора
Номер патенту: 17465
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: швидкості, секвентного, радіолокатора, вимірювач, цілі
Формула / Реферат:
Измеритель скорости цели для секвентного радиолокатора, содержащий передатчик, антенну с антенным переключателем, приемник и смеситель зондирующих и эхо-сигналов, отличающийся тем, что передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой...
Радіолокатор з несинусоідальним імпульсним сигналом
Номер патенту: 17462
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: радіолокатор, несинусоідальним, сигналом, імпульсним
Формула / Реферат:
Радиолокатор с несинусоидальным импульсным сигналом, содержащий приемо-передающую антенну с антенным переключателем, передатчик периодических несинусоидальных импульсных сигналов, синхронизатор, индикатор и приемник с широкополосным усилителем, гетеродином и смесителем, отличающийся тем, что смеситель выполнен по мостовой схеме из четырех высокочастотных широкополосных диодов с квадратичной вольт-амперной характеристикой, на выходе смесителя...
Спосіб захисту наземної рлс від пасивних перешкод

Номер патенту: 13919
Опубліковано: 25.04.1997
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Осипа Володимир Олександрович
МПК: G01S 17/06
Мітки: захисту, спосіб, наземної, пасивних, перешкод, рлс
Формула / Реферат:
Способ защиты наземной РЛС от пассивных помех, заключающийся в излучении зондирующих сигналов, приеме эхо-сигналов, задержке эхо-сигнала и вычитании задержанного сигнала из принимаемого в данный момент сигнала, отличающийся тем, что излучают несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов одинаковой полярности длительностью менее 1 нс без несущей частоты, а время задержки эхо-сигнала выбирают...
Попередній патент: Радіолокаційний імпульсний дальномір
Наступний патент: Спосіб виготовлення металевого двохстінного циліндричного резервуару для зберігання нафтопродуктів
Випадковий патент: Нікотинамід, який проявляє кардіопротекторну дію