Вимірювач швидкості цілі для секвентного радіолокатора

Формула / Реферат
Измеритель скорости цели для секвентного радиолокатора, содержащий передатчик, антенну с антенным переключателем, приемник и смеситель зондирующих и эхо-сигналов, отличающийся тем, что передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой схеме из четырех высокочастотных широкополосных диодов с квадратичной вольт-амперной характеристикой, на выходе смесителя установлен фильтр нижних частот с полосой пропускания меньше частоты следования F зондирующих импульсов, но больше максимальной допплеровской частоты эхо-сигнала, на выходе этого фильтра установлен измеритель длительности импульса t, выход которого связан с вычислителем радиальной скорости цели V, из следующего уравнения
где F - частота следования зондирующих видеоимпульсов;
fв - верхняя граничная частота полосы пропускания антенны;
n - номер гармоники спектра сигнала на выходе фильтра;
c - скорость света;
t - длительность импульса сигнала на выходе фильтра;
Vr - радиальная скорость цели;
N - количество гармоник спектра зондирующего сигнала;
n - текущий номер гармоники спектра сигнала.
Текст
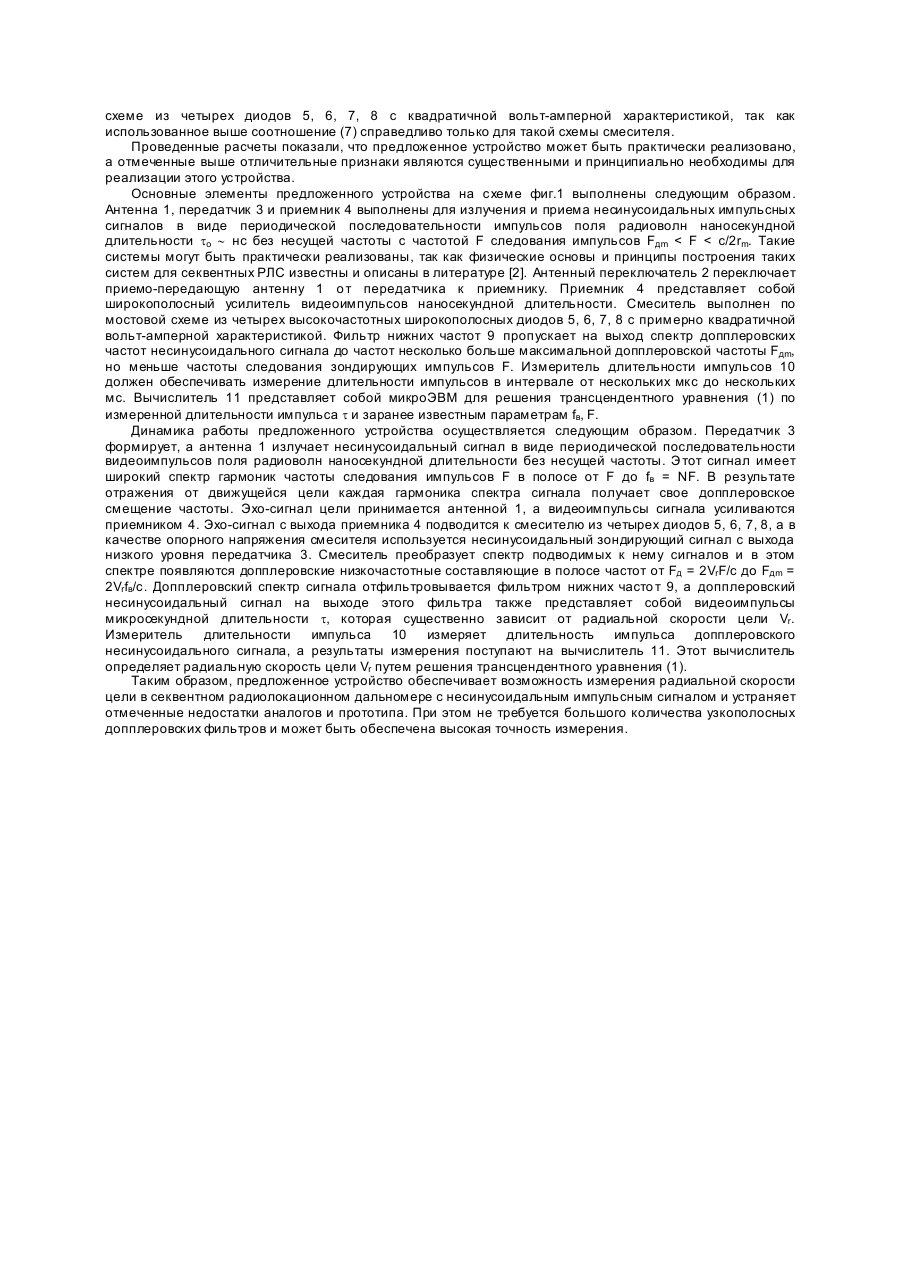
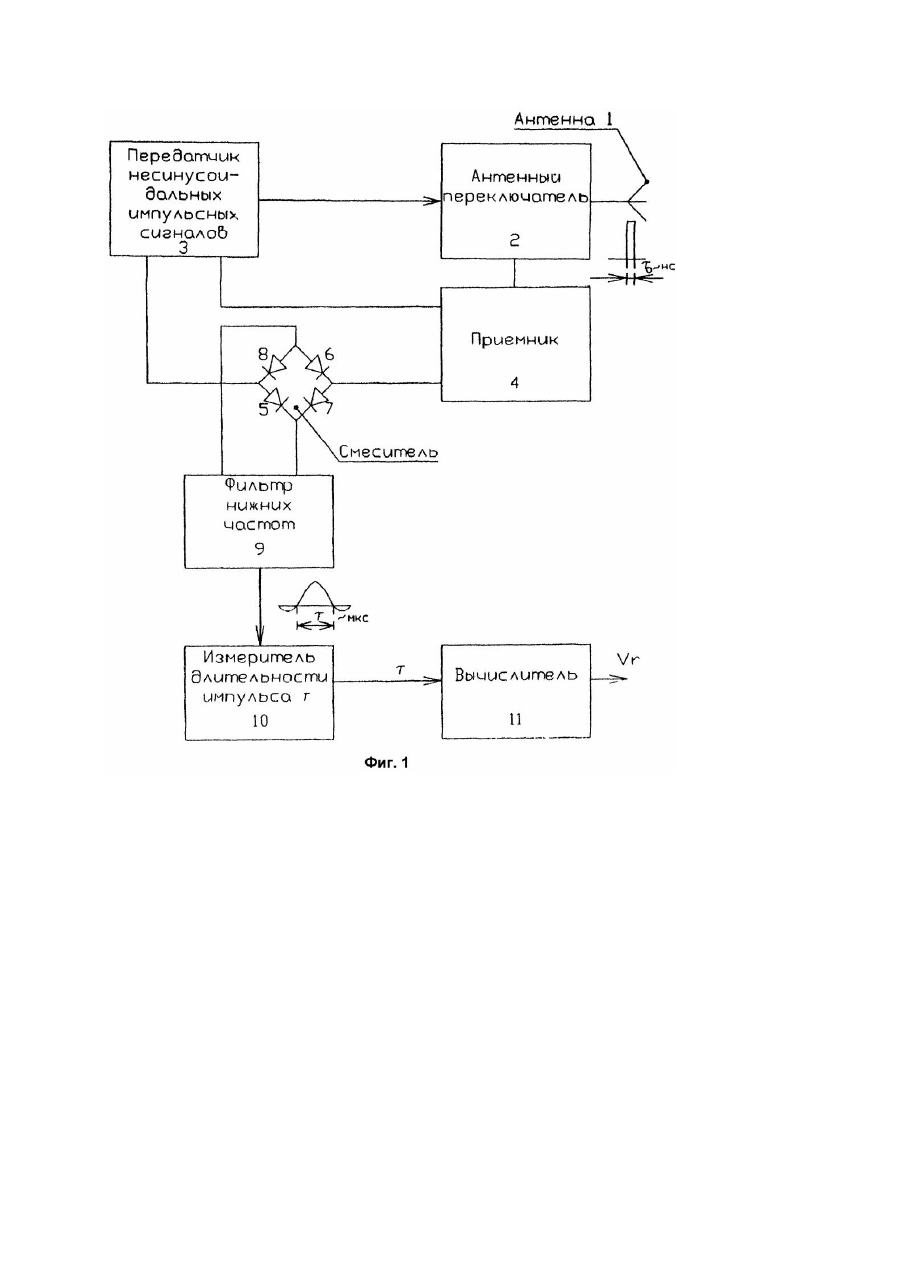
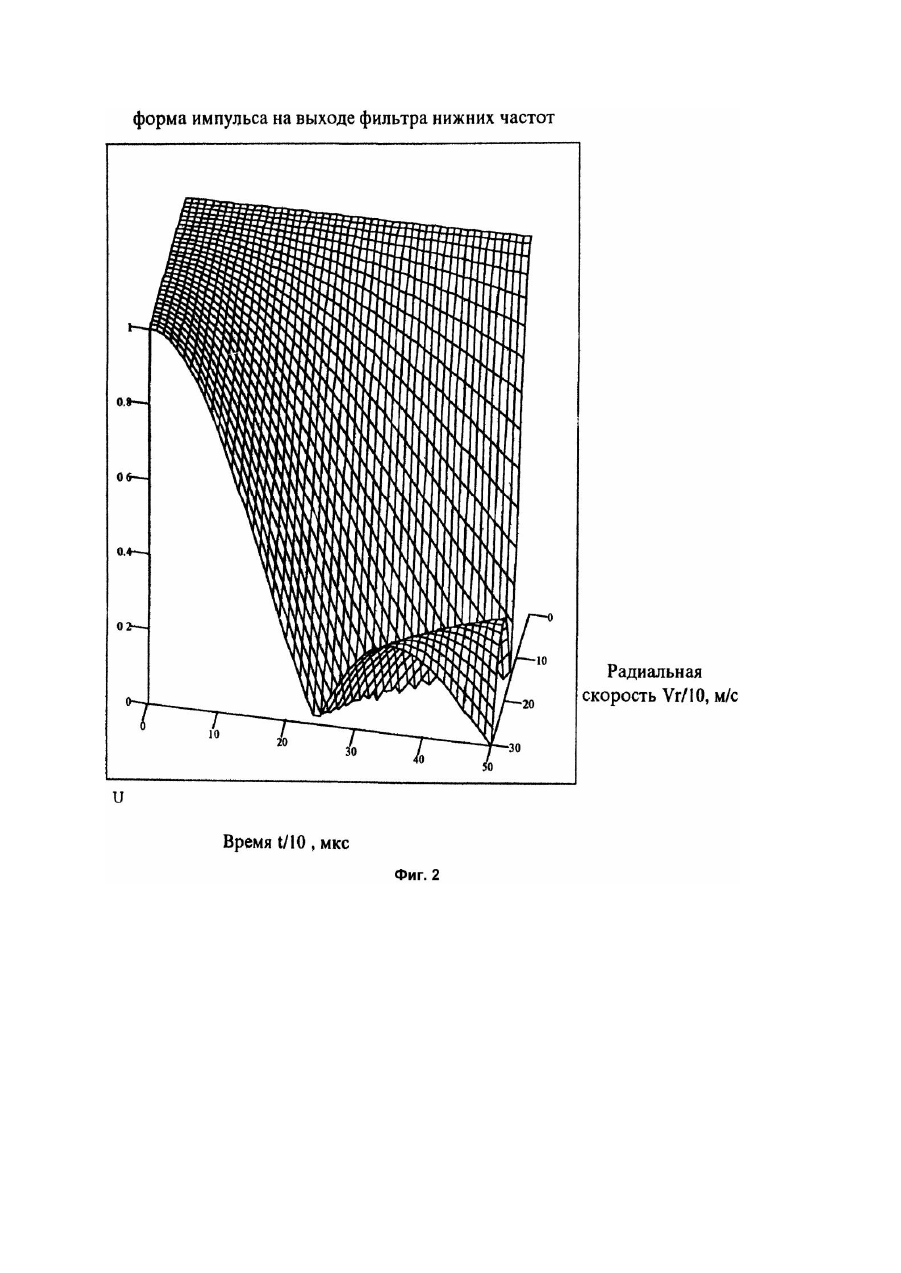
Изобретение относится к области радиолокации и может быть использовано в секвентных радиолокационных дальномерах с несинусоидальным импульсным сигналом в виде периодической последовательности видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты для измерения радиальной скорости цели. Известен измеритель радиальной скорости целей с непрерывным излучением и фильтрами допплеровских частот [1, с.393, рис.15.1]. В детекторе приемника этого устройства происходит выделение низкочастотных колебаний, включающих все составляющие с допплеровскими частотами сигналов, отраженных от целей и мешающих объектов. Это происходит потому, что на детектор вместе с эхосигналами поступает также прямой синусоидальный сигнал передатчика. Допплеровские частоты выделяются допплеровскими фильтрами, а величину допплеровской частоты определяют по номеру фильтра, на выходе которого имеется сигнал. По допплеровской частоте определяют радиальную скорость цели. Недостатком этого аналога является то, что для измерения скорости в широком интервале требуется большое количество узкополосных допплеровских фильтров, а при малом количестве фильтров приходится расширить их полосу пропускания, что существенно снижает точность измерения. Другой недостаток этого аналога состоит в том что такая РЛС не позволяет измерять дальность цели. Известно также устройство измерения скорости цели для секвентного радиолокатора с несинусоидальным импульсным сигналом [2, с.300 - 302, рис.6.3.3]. Зондирующий сигнал такого радиолокатора представляет периодическую последовательность видеоимпульсов поля радиоволн наносекундной длительности без несущей часто ты с постоянным периодом следования импульсов. Принцип действия этого устройства основан на том, что период следования видеоимпульсов эхо-сигнала, отраженного от движущейся цели, будет немного отличаться от периода следования зондирующих импульсов и зависит от радиальной скорости цели. Это объясняется тем, что за период следования импульсов цель проходит расстояние, которое иногда можно определить по изменению периода следования видеоимпульсов эхо-сигнала. Хотя это изменение дальности мало, но высокая разрешающая способность секвентной РЛС по дальности позволяет заметить и измерить это изменение дальности и определить скорость цели. В рассматриваемом аналоге для выделения импульсов эхо-сигнала с тем или иным периодом следования используются широкополосные усилители видеоимпульсов с петлей обратной связи в виде неискажающей линии задержки [2, с.22, 23, рис.1.3.1]. Такой усилитель обладает избирательными свойствами и накапливает и усиливает только такие видеоимпульсные несинусоидальные сигналы, период следования которых точно равен времени задержки линии в цепи обратной связи. То есть такой усилитель выполняет роль допплеровского узкополосного фильтра для несинусоидальных импульсных сигналов. В рассматриваемом аналоге используется множество таких фильтров, длины линий задержки которых немного отличаются друг от др уга и перекрывают возможный диапазон изменения периода следования видеоимпульсов эхо-сигнала движущейся цели. При этом радиальную скорость цели определяют по номеру фильтра, на выходе которого будет накоплен и выделен несинусоидальный эхо-сигнал цели. Недостатком этого аналога является то, что для измерения скорости цели в широком диапазоне скоростей требуется большое количество допплеровских фильтров для видеоимпульсного несинусоидального сигнала в виде усилителей с обратной связью и линией задержки. Другой недостаток аналога связан с трудностью выполнения неискажающих линий задержки на требуемые для радиолокационного дальномера периоды следования импульсов и объясняется следующим. В радиолокационном дальномере для однозначного измерения дальности цели необходимо, чтобы период следования зондирующи х импульсов T был T > 2rm/c, где rm - максимальная дальность обнаружения; c - скорость света. Неискажающая линия задержки усилителя аналога выполняется обычно из отрезка коаксиального кабеля. Требуемое для дальномера время задержки T не может быть обеспечено такой линией задержек, так как длина кабеля окажется очень большой (порядка 2rm), а потери в таком длинном кабеле очень велики. Поэтому в аналоге длину линии задержки допплеровского фильтра выбирают значительно меньше 2rm, а период следования импульсов - значительно меньше T, что не позволяет использовать такой радиолокатор для измерения дальности целей. В качестве прототипа выбран измеритель радиальной скорости цели на основе измерения допплеровского сдвига частоты эхо-сигнала движущейся цели [1]. Прототип содержит следующие основные элементы: передатчик в виде генератора непрерывности синусоидальных колебаний высокой частоты с передающей антенной; приемник с приемной антенной, смеситель, в котором в качестве опорного напряжения использован синусоидальный сигнал передатчика; амплитудный детектор огибающей сигнала; усилитель допплеровской частоты и измеритель допплеровской частоты. На выходе смесителя образуются колебания с частотой Допплера. Огибающая высокочастотных колебаний выделяется с помощью амплитудного детектора. Далее колебания на частоте Допплера усиливаются и подводятся к измерителю частоты. Шкала измерителя частоты проградуирована в единицах радиальной скорости, которая пропорциональна частоте Допплера. Недостатком прототипа является то, что такой измеритель скорости цели нельзя непосредственно использовать в секвентном радиолокаторе, в котором сигнал имеет очень широкий спектр и множество допплеровских частот, измерить которые измерителем частоты не удается. Другой недостаток прототипа состоит в том, что такой радиолокатор не может измерять дальность цели. Для обеспечения измерения дальности следует использовать импульсный зондирующий сигнал. В последнем случае в радиолокаторе можно использовать одну приемо-передающею антенну с антенным переключателем. Третий недостаток прототипа состоит в том, что в таком радиолокаторе могут возникнуть комбинации допплеровских частот на вы ходе детектора, что может привести к большой погрешности измерения радиальной скорости цели. В основу изобретения поставлена задача усовершенствования измерителя скорости цели для секвентного радиолокатора, в котором в результате выполнения передатчика, антенны и приемника для несинусоидальных импульсных сигналов с определенной частотой следования видеоимпульсов и использования измерителя длительность импульсов на выходе фильтра смесителя приемника обеспечивается определение радиальной скорости цели по результату измерения длительности импульса, что позволяет повысить точность измерения радиальной скорости цели в секвентном радиолокационном дальномере. Поставленная задача решается тем, что в измерителе скорости цели для секвентного радиолокатора, содержащем передатчик, антенну с антенным переключателем, приемник и смеситель зондирующи х и эхосигналов, согласно изобретению передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой схеме из четырех высокочастотных широкополосных диодов с квадратичной вольт-амперной характеристикой, на выходе смесителя установлен фильтр нижних частот с полосой пропускания меньше частоты следования F зондирующих импульсов, но больше максимальной допплеровской частоты эхосигнала, на выходе этого фильтра установлен измеритель длительности импульса t, выход которого связан с вычислителем радиальной скорости цели Vr, из следующего уравнения где F - частота следования зондирующих видеоимпульсов; fв - верхняя граничная частота полосы пропускания антенны; n - номер гармоники спектра сигнала на выходе фильтра; c - скорость света; t - длительность импульса сигнала на выходе фильтра; Vr - радиальная скорость цели; N - количество гармоник спектра зондирующего сигнала; n - текущий номер гармоники спектра сигнала. При этом имевшийся в прототипе измеритель допплеровской частоты в предложенном устройстве не используется. Выполнение приемо-передающей аппаратуры устройства для видеоимпульсных сигналов с указанной частотой следования импульсов и дополнительное включение в состав устройства измерителя длительности импульсов на выходе фильтра смесителя позволяет определить радиальную скорость цели по длительности импульса, что расширяет возможности секвентного радиолокационного дальномера и повышает точность измерения радиальной скорости цели, а также устраняет отмеченные недостатки аналогов и прототипа. Техническая сущность и принцип действия предложенного устройства поясняются рисунками на фиг.1, 2, 3. На фиг.1 представлена упрощенная структурная схема предложенного устройства, а также условно показаны приемо-передающая антенна и упрощенные эпюры импульсов зондирующего сигнала и сигнала на выходе фильтра нижних частот. На фиг.2 представлена зависимость формы импульса сигнала на выходе фильтра нижних частот от радиальной скорости цели. На фиг.3 представлена зависимость длительности импульса t на выходе фильтра нижних частот от радиальной скорости цели. В состав предложенного устройства на схеме фиг.1 входят следующие основные элементы: - приемо-передающая антенна 1 с антенным переключателем 2 для переключения антенны с передачи на прием; - передатчик 3 несинусоидальных импульсных зондирующи х сигналов в виде периодической последовательности видеоимпульсов без несущей частоты длительностью to ~ нс и с частотой следования F (зондирующий сигнал этого передатчика излучается антенной 1, а также используется в качестве гетеродинного напряжения в смесителе приемника); - приемник 4 в виде широкополосного усилителя видеоимпульсов наносекундной длительности; - смеситель эхо-сигнала приемника и зондирующего сигнала передатчика по мостовой схеме из четырех высокочастотных широкополосных диодов 5, 6, 7, 8 ; - фильтр нижних частот 9 для выделения спектра допплеровских частот для все х спектральных составляющих эхо-сигнала цели; - измеритель 10 длительности импульса сигнала t на выходе фильтра нижних частот; - вычислитель 11 радиальной скорости цели V, по измеренному значению длительности импульса t путем решения уравнения (1). Физическая сущность и принцип действия предложенного устройства поясняется следующим. Передатчик 3 формирует, а антенна 1 излучает периодическую последовательность видеоимпульсов поля радиоволн без несущей часто ты наносекундной длительности to с частотой следования импульсов F. Так как антенна имеет ограниченную полосу пропускания, то спектр такого зондирующего сигнала состоит из N гармоник частоты F, a количество гармоник спектра равно где fв - верхняя граничная частота полосы пропускания антенны. Такой зондирующий сигнал можно представить в виде следующего ряда Фурье где t - время, отсчитываемое от середины зондирующего импульса; ur(t) - зондирующий сигнал передатчика вблизи антенны; UmГ - коэффициент, пропорциональный амплитуде видеоимпульса зондирующего сигнала; N - количество гармоник спектра зондирующего сигнала; n - текущий номер гармоники спектра сигнала; F - часто та следования зондирующи х импульсов. При отражении от движущейся цели в результате эффекта Допплера каждая спектральная составляющая сигнала приобретает допплеровское смещение частоты, равное где Vr - радиальная скорость цели; n - номер гармоники спектра сигнала, а знак определяет направление движения цели. Максимальное допплеровское смещение Fдm будет на верхней граничной частоте соответствующей вер хней граничной частоте fв полосы пропускания антенны, и равно спектра, То есть каждая спектральная составляющая несинусоидального импульсного сигнала имеет свой допплеровский сдвиг частоты, а все эти сдвиги образуют спектр допплеровских частот. Измерить все эти допплеровскив сдвиги с помощью измерителя частоты не представляется возможным, так как количество гармоник спектра очень велико. Если выделить все эти допплеровские частоты и отфильтровывать их от други х составляющи х спектра, то выделенный спектр допплеровских частот также образует несинусоидальный импульсный сигнал в виде видеоимпульсов микросекундной длительности. Длительность импульса t такого несинусоидального допплеровского сигнала существенно зависит от радиальной скорости цели Vr. Поэтому предлагается определять скорость цели по результату измерения длительности импульса t несинусоидального сигнала, соответствующего спектру допплеровских частот для всех составляющи х эхосигнала цели. Выделять спектр допплеровских частот несинусоидального сигнала предлагается с помощью смесителя эхо-сигнала и зондирующего сигнала на диодах 5, 6, 7, 8 и фильтра нижних частот 9. Ниже приводятся математические соотношения, подтверждающие возможность практической реализации предложенного технического решения. Смеситель приемника выполнен по мостовой схеме из четырех высокочастотных широкополосных диодов 5, 6, 7, 8. Эти диоды должны иметь примерно квадратичную вольт-амперную характеристику, определяемую соотношением где i - ток через диод; u - напряжение на диоде; a - коэффициент вольт-амперной характеристики диода. В качестве гетеродинного напряжения для смесителя приемника использован зондирующий сигнал передатчика 3, определяемый соотношением (3). Напряжение сигнала на выходе смесителя uсм пропорционально току диода и приближенно определяется следующим соотношением где a - коэффициент вольт-амперной характеристики диода; b - коэффициент, зависящий от сопротивления нагрузки; ur - напряжение зондирующего сигнала, определяемое соотношением (3); uc - напряжение эхо-сигнала цели на выходе приемника 4, определяемое соотношением Umc - коэффициент, пропорциональный амплитуде видеоимпульса эхо-сигнала на выходе приемника; t - время, отсчитываемое от середины зондирующего импульса; tz - время запаздывания импульса эхо-сигнала относительно зондирующего импульса; Vr - радиальная скорость цели; c - скорость света. Первый и второй члены в (7) содержат постоянную составляющую и гармоники, частоты которых выше или равны частоте F следования зондирующи х импульсов. Эти гармоники будут подавлены фильтром нижних частот 9 и не пройдут на вы ход устройства, так как полоса пропускания фильтра меньше F. Последнее слагаемое в (7) можно представить в следующем виде В выражение (9) входят допплеровские составляющие сигнала на выходе смесителя, спектр которых расположен в полосе низких частот до Fдm = 2VrNF/c = 2Vrfв/c. Допплеровский спектр сигнала в этой полосе пройдет фильтр нижних частот 9, а др угие составляющие спектра сигнала будут подавлены этим фильтром. Из выражения (9) видно, что напряжение сигнала на выходе фильтра нижних частот будет Расчеты по формуле (10) показали, что напряжение сигнала u вых на выходе фильтра нижних частот также представляет собой видеоимпульсы, но длительность видеоимпульса t будет значительно больше длительности наносекундного зондирующего импульса to и имеет порядок сотен мкс. При этом длительность t видеоимпульса uвых существенно зависит от радиальной скорости Vr, то есть несет информацию о скорости цели, а время запаздывания tz практически не влияет на длительность импульса t. Пример расчета формы импульса сигнала на выходе фильтра нижних частот в зависимости от радиальной скорости цели Vr представлен на фиг.2. Эти расчеты выполнены для антенны с полосой пропускания fв = 1Ггц. а частота следования зондирующих импульсов F была больше максимальной допплеровской частоты Fдm. Пример расчета подтверждает, что радиальную скорость цели можно определить по результату измерения длительности импульса t на выходе фильтра нижних частот 9. Для определения радиальной скорости цели Vr по измеренной длительности импульса t на выходе фильтра нижних частот 9 предлагается использовать уравнение (1). Это уравнение получено из соотношения (10) путем приравнивания последнего нулю при t - t/2. При этом для удобства расчета было условно принято, что tz = 0. Это можно допустить, так как время запаздывания tz практически не влияет на длительность импульса t. Уравнение (1) позволяет однозначно определить модуль радиальной скорости Vr. Это можно видеть из графика на фиг.3, где представлена расчетная зависимость длительности импульса t на выходе фильтра нижних частот 9 от радиальной скорости цели Vr. Следует отметить, что эффект Допплера приводит также к небольшому изменению длительности видеоимпульса эхо-сигнала на выходе приемника 4 по сравнению с длительностью to зондирующего импульса. Это можно видеть из соотношения (8). Однако для реальных целей (при Vr
ДивитисяДодаткова інформація
Назва патенту англійськоюTarget velocity measuring device for sequential radar
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюИзмеритель скорости цели для секвентного радиолокатора
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 17/06
Мітки: швидкості, секвентного, радіолокатора, вимірювач, цілі
Код посилання
<a href="https://ua.patents.su/8-17465-vimiryuvach-shvidkosti-cili-dlya-sekventnogo-radiolokatora.html" target="_blank" rel="follow" title="База патентів України">Вимірювач швидкості цілі для секвентного радіолокатора</a>
Вимірювач кутової координати цілі для секвентного радіолокатора
Номер патенту: 17470
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: секвентного, цілі, координати, вимірювач, кутової, радіолокатора
Формула / Реферат:
Измеритель угловой координаты цели для секвентного радиолокатора, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных импульсных сигналов в виде периодической последовательности с частотой следования прямоугольных видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что приемопередающая антенна выполнена в виде вибратора, концы которого связаны с антенным...
Секвентний вимірювач кута місця і швидкості цілі з пристроєм захисту від пасивних перешкод
Номер патенту: 17459
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: місця, вимірювач, пристроєм, захисту, перешкод, секвентний, швидкості, цілі, кута, пасивних
Формула / Реферат:
Секвентный измеритель угла места и скорости цели с устройством защиты от пассивных помех, содержащий приемо-передающую антенну с антенным переключателем, передатчик периодических видеоимпульсов наносекундной длительности и приемник, отличающийся тем, что передатчик выполнен с частотой следования F зондирующих импульсов значительно большей максимальной допплеровской частоты на верхней граничной частоте fв полосы пропускания антенны, на выходе...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: спосіб, радіолокатора, секвентного, вимірювання, кута, наземного, цілі, місця
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: наземного, спосіб, координат, секвентного, вимірювання, кутових, радіолокатора, цілі
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Секвентний вимірювач азимуту рухомої цілі з пристроєм захисту від пасивних перешкод
Номер патенту: 17460
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: секвентний, пасивних, азимуту, перешкод, захисту, пристроєм, рухомої, цілі, вимірювач
Формула / Реферат:
Секвентный измеритель азимута движущейся цели с устройством защиты от пассивных помех, содержащий разнесенные по горизонтали на расстояние d первую приемо-передающую антенну с антенным переключателем и вторую приемную антенну, первый и второй приемники этих антенн и передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что на выходах первого и второго приемников установлены соответственно...
Попередній патент: Бортовий секвентний радіолокатор для виявлення підземних об’єктів
Наступний патент: Спосіб фарбування шкір
Випадковий патент: Свічка запалювання для двигунів внутрішнього згоряння