Пристрій керування переміщенням дверей
Номер патенту: 1762
Опубліковано: 25.10.1994
Автори: Лукавий Роман Мирославович, Кондратик Володимир Васильович
Формула / Реферат
Устройство управления перемещением дверей, содержащее установленные в зоне движения дверей датчики контроля движущегося объекта и датчики контроля скорости движения дверей, соединенные выходами с входами блока формирования управляющих сигналов, связанного выходами через блок управления электроприводом с электроприводом, кинематически соединенным с дверями, отличающееся тем, что оно снабжено блоком контроля порогового значения скорости движения дверей с датчиком скорости, выполненным в виде кодового диска и блоком контроля энергопотребления электропривода, блок управления электроприводом выполнен в виде тиристорного узла частотного управления с естественной коммутацией тиристоров, а электропривод выполнен в виде трехфазного асинхронного электродвигателя с короткозамкнутым ротором, на валу которого дополнительно расположен кодовый диск блока контроля порогового значения скорости движения дверей, соединенного выходом с дополнительным входом блока формирования, управляющих сигналов, который выходами подключен к входам тиристорного узла частотного управления с естественной коммутацией тиристоров, который первым и вторым дополнительными выходами соединен с первым и вторым входами блока контроля энергопотребления электропривода, связанного выходом с дополнительным входом тиристорного узла частотного управления с естественной коммутацией тиристоров.
Текст
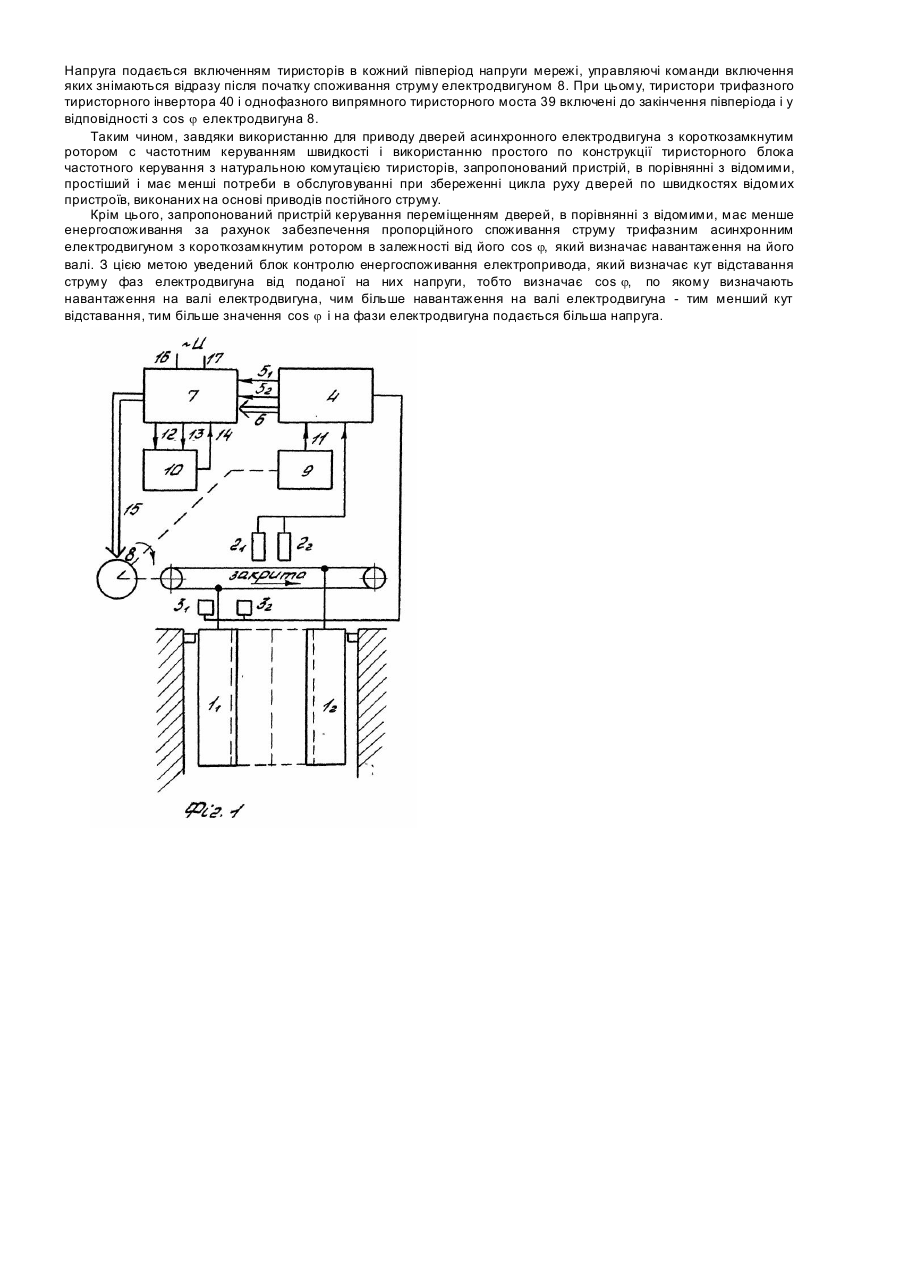
Винахід належить до галузі електротехніки і може бути застосований для керування переміщенням дверей адміністративних, промислових і інших будинків при двохсторонньому проході через них. Відомий пристрій для забезпечення оптимального відкривання і закривання дверей, що містить блок формування команд керування, одні з входів якого з'єднані з датчиками контроля рухомого об’єкта, а також ланцюгову передачу, з'єднану з дверима [1]. Недоліком цього пристрою керування переміщенням дверей є його складність за рахунок з'єднання вала двигуна з ланцюговою передачею, з'єднаною з дверима через понижаючий редуктор, а також підвищене енергоспоживання завдяки відсутності зворотніх зв'язків по навантаженню на валі двигуна. Найближчим по технічній суті є пристрій керування переміщенням дверей, що містить установлені в зоні руху дверей датчики контролю рухомого об'єкта і датчики контролю швидкості руху дверей, які з'єднані виходами з входами блока формування команд керування, що сполучений виходами через блок керування електроприводом з електроприводом, що кінематичне з'єднаний з дверима [2]. Недоліком цього пристрою є ускладнення, так як для приводу дверей використаний привід постійного струму, що збільшує вимоги до обслуговування двигуна, крім цього, пристрій має підвищення енергоспоживання завдяки відсутності зворотніх зв'язків по навантаженню на валі двигуна. Технічним результатом винаходу є розширення технологічних можливостей пристрою шляхом спрощення і зменшення енергоспоживання завдяки використанню для привода дверей трифазного асинхронного електродвигуна з короткозамкнутим ротором і забезпечення пропорційного споживання струму електродвигуном в залежності від його cos j, який визначає навантаження на його валі. Поставлене завдання досягається тим, що пристрій керування переміщенням дверей, що містить установлені в зону руху дверей датчики контролю рухомого об'єкта і датчики контролю швидкості руху дверей, які з'єднані виходами з входами блока формування команд керування, що сполучений виходами через блок керування електроприводом з електроприводом, що кінематично з'єднаний з дверими, згідно винаходу, забезпечений блоком контролю порогового значення швидкості руху дверей з датчиком швидкості, що виконаний у вигляді кодового диску, і блоком контролю енергоспоживання електропривода, блок керування електроприводом виконаний у вигляді тиристорного вузла частотного керування з натуральною комутацією тиристорів, а електропривід виконаний у вигляді трифазного асинхронного електродвигуна з короткозамкнутим ротором, на валі якого додатково розміщений кодовий диск блока контролю порогового значення швидкості руху дверей, вихід якого з'єднаний з додатковим входом, блока формування команд керування, який підключений виходами до входів тиристорного вузла частотного керування з натуральною комутацією тиристорів, який першим і другим додатковими виходами з'єднаний з першим і другим входами блока контролю енергоспоживання електропривода, що сполучений виходом з додатковим входом тиристорного вузла частотного керування з натуральною комутацією тиристорів. Суть винаходу пояснюється графічними матеріалами, де на фіг. 1 зображена структурна схема пристрою керування переміщенням дверей; на фіг. 2 - схема блока контролю енергоспоживання електропривода для однієї частоти обертання; на фіг. 3 - схема блока контролю порогового значення швидкості; на фіг. 4 - приклад схеми вузла контролю частоти слідування імпульсів, який знаходиться в блоці контролю порогового значення швидкості; на фіг. 5 - схема тиристорного вузла частотного керування з натуральною комутацією тиристорів. Пристрій керування переміщенням дверей (фіг. 1) містить установлені в зоні руху дверей 11, 12 датчики 21, 22 контролю рухомого об'єкта і датчики 31, 32 контролю швидкості руху дверей, які з'єднані виходами з входами блока 4 формування команд керування, що сполучений виходами 51, 52, 6 через блок 7 керування електроприводом з електроприводом 8, що кінематично з'єднаний з дверима 11, 12, також забезпечений блоком 9 контролю порогового значення швидкості руху дверей 11, 12 з датчиком швидкості, що виконаний у вигляді кодового диску, і блоком 10 контролю енергоспоживання електропривода, блок 7 керування електроприводом виконаний у вигляді тиристорного вузла частотного керування з натуральною комутацією тиристорів, а електропривід 8 виконаний у вигляді трифазного асинхронного електродвигуна з короткозамкнутим ротором, на валі якого додатково розміщений кодовий диск блока 9 контролю порогового значення швидкості руху дверей, вихід 11 якого з'єднаний з додатковим входом блока 4 формування команд керування, який підключений виходами 51, 52, 6 до входів тиристорного вузла 7 частотного керування з натуральною комутацією тиристорів, який першим 12 і другим 13 виходами з'єднаний з першим і другим входами блока 10 контролю енергоспоживання електропривода, що сполучений виходом 14 с додатковим входом тиристорного вузла 7 частотного керування з натуральною комутацією тиристорів, також, містить комутаційні шини 15, 16, 17. Блок 10 контроля енергоспоживання електропривода (фіг. 2) містить послідовно включені RS-тригер 18, елемент 19, який формує напругу, що лінійно змінюється, інвертований інтегруючий елемент 20 і підсилювач 21, опторезистор 22, діод 23 і елемент 24 затримки, вихід якого є виходом блока 10 контролю енергоспоживання електропривода, входами якого є входи RS-тригера 18, що з'єднаний виходом з катодом діода 23, вихід якогосполучений з входом інвертованого інтегруючого елемента 20, а виходи підсилювача 21 підключені до виводів вхідного елемента опторезистора 23, перший 25 вивід вихідного елемента якого сполучений з першим входом елемента 24 затримки, причому, один з входів RS-тригера 18 підключений до другого 26 входа елемента 24 затримки і другого вивода ви хідного елемента опторезистора 23. Блок 9 контролю порогового значення швидкості (фіг. 3) містить випромінюючі діоди 271, 272, прийомні вузли 281, 282, фотодіодів, вузол 29 контролю частоти слідування імпульсів і диск 30, що з'єднаний механічно з валом трифазного асинхронного електродвигуна 8 з короткозамкнутим ротором. Вузол 29 контролю частоти слідування імпульсів (фіг. 4) містить RS-тригер 31, конденсатори 321, 322, діоди 331,332, резистори 341, 342, 343, транзистор 35, інвертор 36, вхідні шини 371, 372. Тиристорний вузол частотного керування з натуральною комутацією тиристорів блока 7 керування (фіг. 5) містить вузол 38 аналіза напруги мережі, однофазний випрямний тиристорний міст 39, трифазний тиристорний інвертор 40, вузол 41 контролю відсутності стр уму, вузол 42 логіки, комутаційну шин у 43. Елемент 19, який формує напругу, що лінійно змінюється (фіг. 2) містить резистор 44, конденсатор 45. Інвертований Інтегруючий елемент 20 (фіг. 2) містить резистори 46, 47, транзистор 48,конденсатор 49. Підсилювач 21 (фіг. 2) містить резистори 50, 51, транзистор 52. Елемент 24 затримки (фіг. 2) містить резистор 53, конденсатор 54, діод 55, пороговий елемент 56. Пристрій керування переміщенням дверей (фіг. 1) працює таким чином. В блок 4 формування команд керування надходить інформація від датчиків 21, 22 контролю рухомого об'єкта, від датчиків 31, 3 2 контролю швидкості руху дверей 1 від блока 9 контролю порогового значення швидкості руху дверей, який контролює швидкість обертання вала трифазного асинхронного електродвигуна 8 з короткозамкнутим ротором 1 при зменшенні цієї швидкості нижче від швидкості доведення дверей 1 1, 12 формує не своєму ви ході її нульовий логічний рівень. При наявності рухомого об'єкта в зоні дверей 11, 12, з одного з датчиків 21, 22 контролю рухомого об'єкта в блок 4 формування команд керування надходить одиничний логічний рівень. При цьому, блок 4 формування команд керування на першому 51 виході формує одиничний логічний рівень, що відповідає команді включення, а на другому 52 ви ході - нульовий логічний рівень, що відповідає напрямку обертання вала трифазного асинхронного електродвигуна 8 з короткозамкнутим ротором для відкривання дверей 11, 12. Також, в групі 6 виходів блока 4 формування команд керування ним формується комбінація логічних рівнів, що відповідають швидкості обертання вала трифазного асинхронного електродвигуна 8 з короткозамкнутим ротором 1/3 від номінальної його швидкості, надаючи перевагу 1500 об/хв. Тиристорний вузол частотного керування з натуральною комутацією тиристорів блока 7 керування електроприводом живиться від шин 16, 17 однофазної мережі змінного струму і формує на своїх ви ходах 15 трифазну напругу з частотою, яка відповідає необхідній швидкості, що задається комбінацією логічних рівнів групи 6 виходів блока 4 формування команд керування. При цьому, формується трифазна напруга, яка забезпечує обертання вала електродвигуна 8 для відкривання дверей 11, 12 при наявності логічного нуля і для закривання - при наявності логічної одиниці на виході 52 блока 4 формування команд керування. Крім цього, блок 7 керування електроприводом на першому 12 виході формує логічний нуль при переході однофазної напруги мережі через нуль, а на другому 13 виході - формує логічний нуль при відсутності струму в фазах електродвигуна 8. Блок 10 контролю енергоспоживання електропривода по логічним рівням, які поступають на його вхідні шини 12, 13, визначає кут відставання струму в фазах електродвигуна 8 від поданої на них напруги, який відповідає навантаженню на валі електродвигуна 8, чим більше навантаження - тим менший кут відставання і тим більше значення cos j. В залежності від cos j блок 10 контролю енергоспоживання електропривода формує затримку на подачу напруги на фази електродвигуна 8, яка дозволяється сформованим на виході 14 блока 10 рівнем логічної одиниці. Чим більше значення cos j, тим менша ця затримка і блок 7 керування електроприводом подає більшу напругу на фази електродвигуна 8. Отже, при збільшенні навантаження на валі електродвигуна 8 на його фази подається більша напруга для збільшення момента на валі електродвигуна 8, за рахунок визначення його cos j, тобто забезпечений зворотній зв'язок по cos j, що забезпечує оптимальне енергоспоживання електродвигуна 8 в залежності від навантаження на його валі. Таким чином, при наявності рухомого об'єкта в зоні дверей 1 1, 12 включається електродвигун 8 для їх відкривання на швидкості 1/3 від номінальної. Перед закінченням відкривання дверей 1 1, 12 спрацьовує датчик 31 контролю швидкості руху дверей і швидкість відкривання дверей 11, 12 знижується до швидкості доведення, яка відповідає швидкості вала електродвигуна 8 1/24 від номінальної. На цій швидкості двері 11, 12 повільно відкриваються до відказу, після чого швидкість дверей 11, 12 зменшується, що контролює блок 9 контролю порогового значення швидкості. При цьому електродвигун 8 відключається І при відсутності рухомого об'єкта в зоні дверей 11, 12 блок 4 формування команд керування формує наступні логічні рівні: на виходах 5 1, 52 - логічні одиниці, а в групі 6 виходів - комбінація логічних рівнів, яка відповідає швидкості обертання вала електродвигуна 8 1/6 від номінальної. Таким чином, обертання вал» електродвигуна 8 реверсується, двері 11, 12 закриваються з швидкістю в два рази меншою від швидкості відкривання. Якщо під час закривання дверей 11, 12 з'явиться рухомий об'єкт в їх зоні, то блок 4 формування команд керування на своїх ви ходах 5 1, 52, 6 формує логічні рівні для забезпечення відкривання дверей 11, 12 з швидкістю вала обертання електродвигуна 8 1/3 від номінальної. Якщо під час закривання дверей 11, 12 буде перепона їх закриванню на ділянці, яка не контролюється датчиком 32, то швидкість вала електродвигуна 8 зменшиться, що визначить блок 9 контролю порогового значення швидкості, і блок 4 формування команд керування формує на своїх ви ходах 51, 52, 6 логічні рівні для забезпечення відкривання дверей 11, 12 на швидкості відкривання. Перед закінченням закривання дверей 11, 12 спрацьовує датчик 32 контролю швидкості руху дверей і швидкість їх закривання зменшується до швидкості Доведення, яка відповідає швидкості вала електродвигуна 8 1/24 від номінальної. З цією швидкістю двері 11, 12 повільно закриваються до повного їх зімкнення, після чого їх швидкість зменшується і при допомозі блока 9 контролю порогового значення швидкості руху дверей і блока 4 формування команд керування електродвигун 8 відключається. Блок 4 формування команд керування, як приклад, забезпечує наступні логічні функції: де А6 - комбінація логічних рівнів в групі 6 виходів, яка відповідає швидкості відкривання (1/3 від номінальної швидкості), закривання (1/6 від номінальної швидкості) і доведення (1/24 від номінальної швидкості електродвигуна 8) згідно індексів; В51, В52 - логічний рівень на виході 51 або 52 згідно індексам; х21, х22 - логічний рівень датчика 21 або 22 контролю рухомого об'єкта згідно індексам; у31, у32 - логічний рівень датчика 31 або 32 контролю швидкості руху дверей згідно індексів; z - логічний рівень на виході її блока 9 контролю порогового значення швидкості руху дверей 11, 12. Блок 10 контролю енергоспоживання електропривода, як приклад, для однієї частоти обертання електродвигуна 8 (фі г. 2) працює таким чином. При переході напруги мережі через нуль на вхідну шину 12 надходить імпульс з нульовим логічним рівнем. При цьому RS-тригер 18 переключається, на його виході буде одиничний логічний рівень, який надходить на вхід елемента 19, який формує напругу, що лінійно змінюється, на виході якого буде напруга лінійно зростати. При надходженні на шину 13 нульового логічного, рівня, який свідчить про відсутність струму в фазах електродвигуна 8, RS-тригер 18 переключається в пепередній стан, на його виході буде нульовий логічний рівень і напруга на виході елемента 19 шунтується діодом 23. Таким чином, на виході елемента 19 буде пилоподібна напруга, амплітуда і ширина кожного з імпульсів цієї напруги буде залежати від тривалості імпульса на виході RS-тригера 18, тобто, буде залежати від часу від момента надходження імпульса, який контролює перехід напруги мережі через нуль, до момента закінчення проходження струму в фазах електродвигуна 8. Отже, чим більше навантаження на валі електродвигуна 8 тим більше значення його cos j, тим менша тривалість імпульсів на виході RS-тригера 18 і менша амплітуда і тривалість імпульсів пилоподібної напруги на виході елемента 19, які надходять на вхід інвертованого інтегруючого елемента 20. На виході інвертованого інтегруючого елемента 20 пилоподібна напруга інтегрується і інвертується, тобто на його ви ході при збільшенні навантаження на валі електродвигуна 8 вона буде збільшуватися. Ця напруга надходить на вхід підсилювача 21, який навантажений вхідним елементом опторезистора 23, через який при збільшенні навантажений на валі електродвигуна 8 проходження струму збільшується і опір його вихідного елемента зменшується. При наявності струму в фазах електродвигуна 8 конденсатор 54 елемента 24 затримки на відключення заряджений через діод 55, який після закінчення прохождення цього струму розряджається через вихідний елемент опторезистора 22, опір якого зменшиться при збільшенні навантаження на валі електродвигуна 8 і, таким чином, чаз розряду конденсатора 54 також зменшиться, тобто зменшиться час затримки вихідного одиничного логічного рівня на виході елемента 24 затримки на відключення від моменту закінчення проходження струму в фазах електродвигуна 8. Нульовий логічний рівень на виході 14 елемента 24 затримки надходить в блок 7 керування електроприводом, дозволяючи включення його відповідних тиристорів, які подають напругу на фази електродвигуна 8. Отже, при збільшенні навантаження на валі електродвигуна 8 швидше виникне нульовий Імпульс на виході 14 елемента 24 від момента зникнення струму в фазах електродвигуна 8 і, відповідно, вони раніше підключаться до напруги, тобто на них буде подана більша напруга. Блок 9 контролю порогового значення швидкості руху дверей (фіг. 3) з вузлом контролю частоти слідування імпульсів (фіг. 4) працює таким чином. Диск 30 з отворами по осі механізації з'єднаний з валом електродвигуна 8 і обертається разом з ним. Випромінюючі діоди 271, 272 розміщені таким чином, що при проходженні променя одного з них через отвір диска 30 промінь другого ним перекривається. Кожний з вузлів 281, 282 фотодіодіа приймає промінь від узгодженого з ним випромінюючого діода 271, 272, при цьому на їх вихода х формуються нульові логічні рівні. Так як отвори в диску 30 мають діаметр менший від відстані між ними, то при обертанні диска 30 на виходах вузлів 281, 282 фотодіодів будуть послідовності імпульсів з нульовим логічним рівнем, причому ці імпульси не перекриваються в часі. Ці послідовності імпульсів надходять на узгодженні їм шини 371, 372 RS-тригера 31, на виході якого при обертанні диска 30 також будуть імпульси. Передні фронти Імпульсів на виході RS-тригера 31 диференціюються конденсатором 321, від'ємні викиди на виході якого зрізуються діодом 332. Отже, при обертанні диска 30 через діод 331 буде надходити послідовність імпульсів, частота надходження яких буде відповідати його швидкості обертання. Конденсатор 32 2 інтегрує цю послідовність імпульсів і при зниженні швидкості обертання диска 30 нижче заданої величини, на виході транзистора 35, який працює в підсилювальному режимі, буде напруга більша від порогової величини спрацювання інвертора 36, на виході якого при цьому буде нульовий логічний рівень. Таким чином, при зменшенні швидкості обертання диска 30 нижче заданого рівня, на виході інвертора 36 буде нульовий логічний рівень, який надходить в блок 4 формування команд керування для зупинки дверей 11, 12 або для реверсу їх р уху в процесі закривання в залежності від ситуації, яку визначає блок 4 формування команд керування. Схемне рішення блока 9 контролю порогового значення швидкості виключає помилку при визначенні руху дверей її, 12 при зупинці диска 30 в стані, при якому один з променів випромінюючих діодів 271, 272 Проходить по межі отвору диска 30, так як виключається помилкове визначення руху дверей 1 1, 12 , коли є невелика вібрація диска 30 при включеному електродвигуні 8 і повністю відкритому чи закритому стані дверей її, 12 (при цьому буде послідовність Імпульсів на виході вузла 281 або 282 фотодіода, який приймає цей промінь). Блок 7 керування електроприводом, виконаний у вигляді тиристорного вузла частотного керування з натуральною комутацією тиристорів (фіг. 5), працює таким чином. Напруга однофазної мережі змінного струму надходить по шинах 16, 17 на вузол 38 аналіза напруги мережі, на виході 12 якого формується нульовий логічний рівень при переході напруги мережі через нуль. Крім цього, на його виході 43 формується одиничний логічний рівень, що визначає Додатний півперіод напруги мережі, який надходить в вузол 42 логіки для формування логічних рівнів включення відповідних тиристорів однофазного випрямного тиристорного моста 39, на який також надходить напруга мережі. З Однофазного випрямного тиристорного моста 39 напруга надходить на трифазний тиристорний Інвертор 40 через вузол 41 контроля відсутності струму, який контролює відсутність струму в колі споживання струму електродвигуна 8, на який надходить трифазна змінна напруга, що сформована трифазним тиристорним Інвертором 40 на виходах 15. При відсутності контрольованого струму на виході 13 вузла 41 контролю відсутності струм у формується логічний рівень, що надходить в вузол 42 логіки для здійснення відповідної коммутації тиристорів трифазного тиристорного інвертора 40. Вузол 42 логіки забезпечує при наявності на його вході 5і логічної одиниці, комутацію тиристорів трифазного тиристорного інвертора 40 в послідовностях, які забезпечують трифазну напругу з частотою, яка відповідає логічним рівням на входах 6, що задають частоту обертання, і в напрямку обертання вала елетродвигуна 8, який відповідає логічному рівню на вході 52, що визначає реверс обертання його вала. Вузол 42 логіки забезпечує перекомутацію і включення тиристорів трифазного тиристорного інвертора 40 і однофазного випрямного тиристорного моста 30 при відсутності стр уму споживання електродвигуна 8 і при наявності нульового логічного рівня на вході 14, який надходить з блока 10 контролю енергоспоживання електропривода. При цьому, на електродвигун 8 подається напруга, величина якої відповідає частоті обертання і навантаженню на його валі. Напруга подається включенням тиристорів в кожний півперіод напруги мережі, управляючі команди включення яких знімаються відразу після початку споживання струму електродвигуном 8. При цьому, тиристори трифазного тиристорного інвертора 40 і однофазного випрямного тиристорного моста 39 включені до закінчення півперіода і у відповідності з cos j електродвигуна 8. Таким чином, завдяки використанню для приводу дверей асинхронного електродвигуна з короткозамкнутим ротором с частотним керуванням швидкості і використанню простого по конструкції тиристорного блока частотного керування з натуральною комутацією тиристорів, запропонований пристрій, в порівнянні з відомими, простіший і має менші потреби в обслуговуванні при збереженні цикла руху дверей по швидкостях відомих пристроїв, виконаних на основі приводів постійного струму. Крім цього, запропонований пристрій керування переміщенням дверей, в порівнянні з відомими, має менше енергоспоживання за рахунок забезпечення пропорційного споживання струму трифазним асинхронним електродвигуном з короткозамкнутим ротором в залежності від його cos j, який визначає навантаження на його валі. З цією метою уведений блок контролю енергоспоживання електропривода, який визначає кут відставання струму фаз електродвигуна від поданої на них напруги, тобто визначає cos j, по якому визначають навантаження на валі електродвигуна, чим більше навантаження на валі електродвигуна - тим менший кут відставання, тим більше значення cos j і на фази електродвигуна подається більша напруга.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for door motion control
Автори англійськоюKondratyk Volodymyr Vasyliiovych, Lukavyi Roman Myroslavovych
Назва патенту російськоюУстройство управления перемещением дверей
Автори російськоюКондратик Владимир Васильевич, Лукавый Роман Мирославович
МПК / Мітки
МПК: G05B 19/19
Мітки: дверей, переміщенням, пристрій, керування
Код посилання
<a href="https://ua.patents.su/6-1762-pristrijj-keruvannya-peremishhennyam-dverejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування переміщенням дверей</a>
Пристрій для керування стикозварювальної машини
Номер патенту: 341
Опубліковано: 30.04.1993
Автори: Кривенко Валерій Георгійович, Андрієнко Федор Олександрович, Кучук-Яценко Сергій Іванович, Горишняков Олексій Іванович, Лазебний Іван Леонтійович, Лядов Володимир Васильович
МПК: B23K 11/04, B23K 11/25
Мітки: керування, пристрій, машини, стикозварювальної
Формула / Реферат:
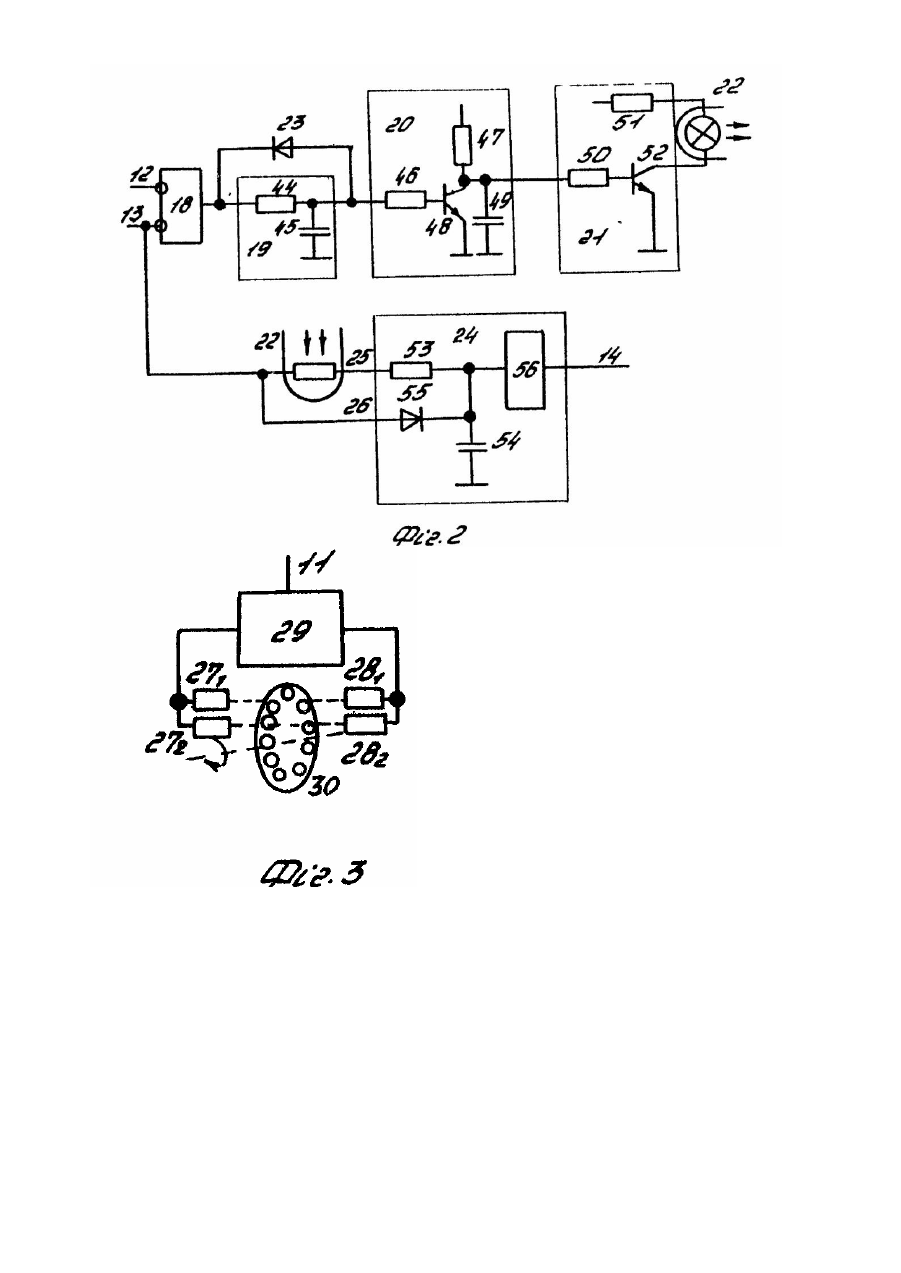
(57) Устройство для управления стыкосварочной машиной, содержащее подвижную и неподвижную станины, электрический привод перемещения подвижной станины, состоящий из соединенных параллельно электромашинного усилителя и двигателя постоянного тока, к двигателю постоянного тока подключен через редуктор следящий золотник, к которому подключены силовые гидравлические цилиндры, к последним присоединен привод осадки и подвижная станина, а также блок...
Пристрій для формування команд керування по шляху переміщення рухомого об’єкта
Номер патенту: 1715
Опубліковано: 25.10.1994
Автор: Клименко Віталій Васильович
МПК: B66B 1/34
Мітки: формування, об'єкта, керування, шляху, команд, рухомого, переміщення, пристрій
Формула / Реферат:
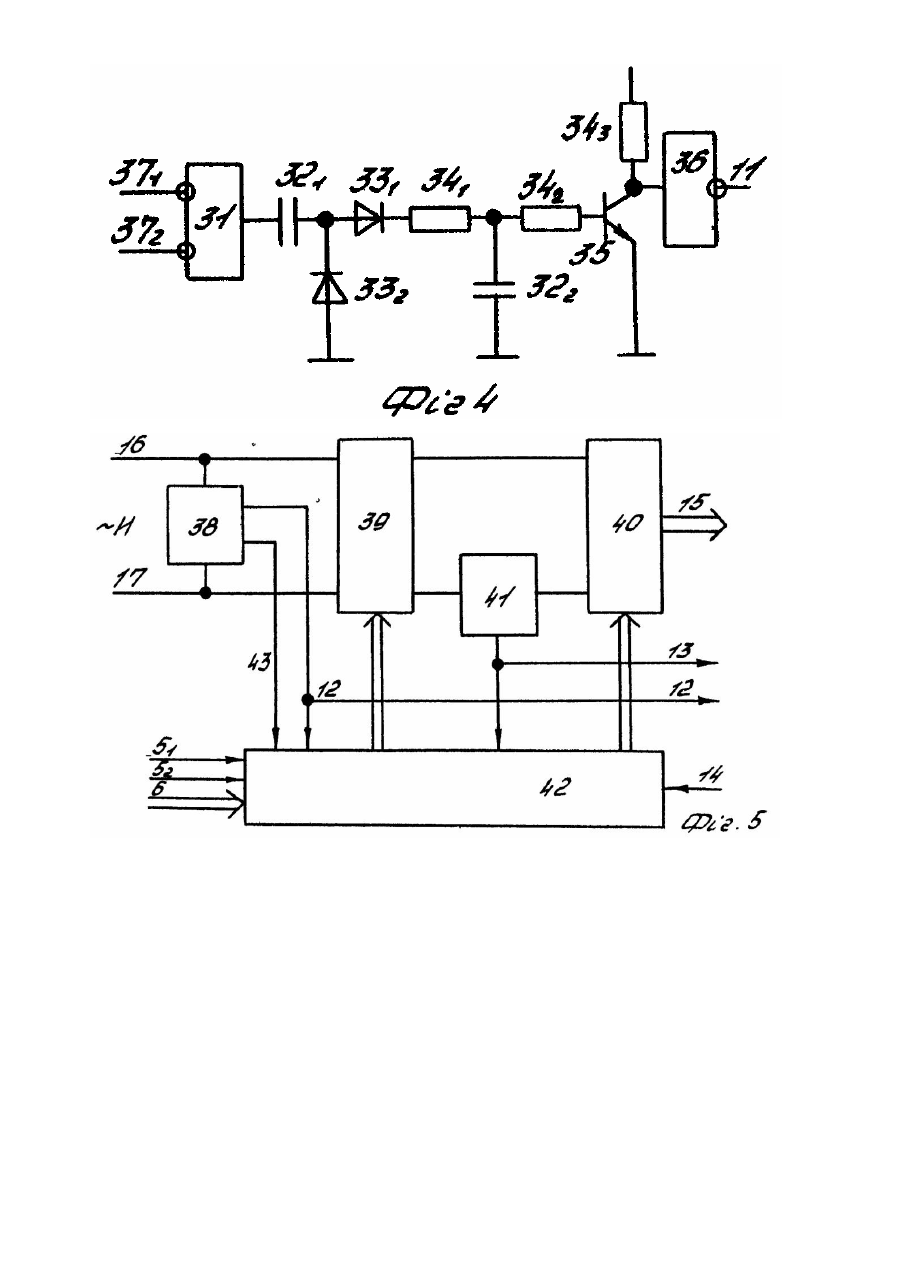
1. Устройство формирования путевых команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, отличающееся тем, что в него введены датчик конечного положения подвижного объекта и, соответственно количеству формируемых команд, блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель причем выходы...
Пристрій для керування роботою пальника
Номер патенту: 630
Опубліковано: 15.12.1993
Автор: Дуденко Віктор Тихонович
МПК: F23N 5/02
Мітки: керування, пальника, роботою, пристрій
Формула / Реферат:
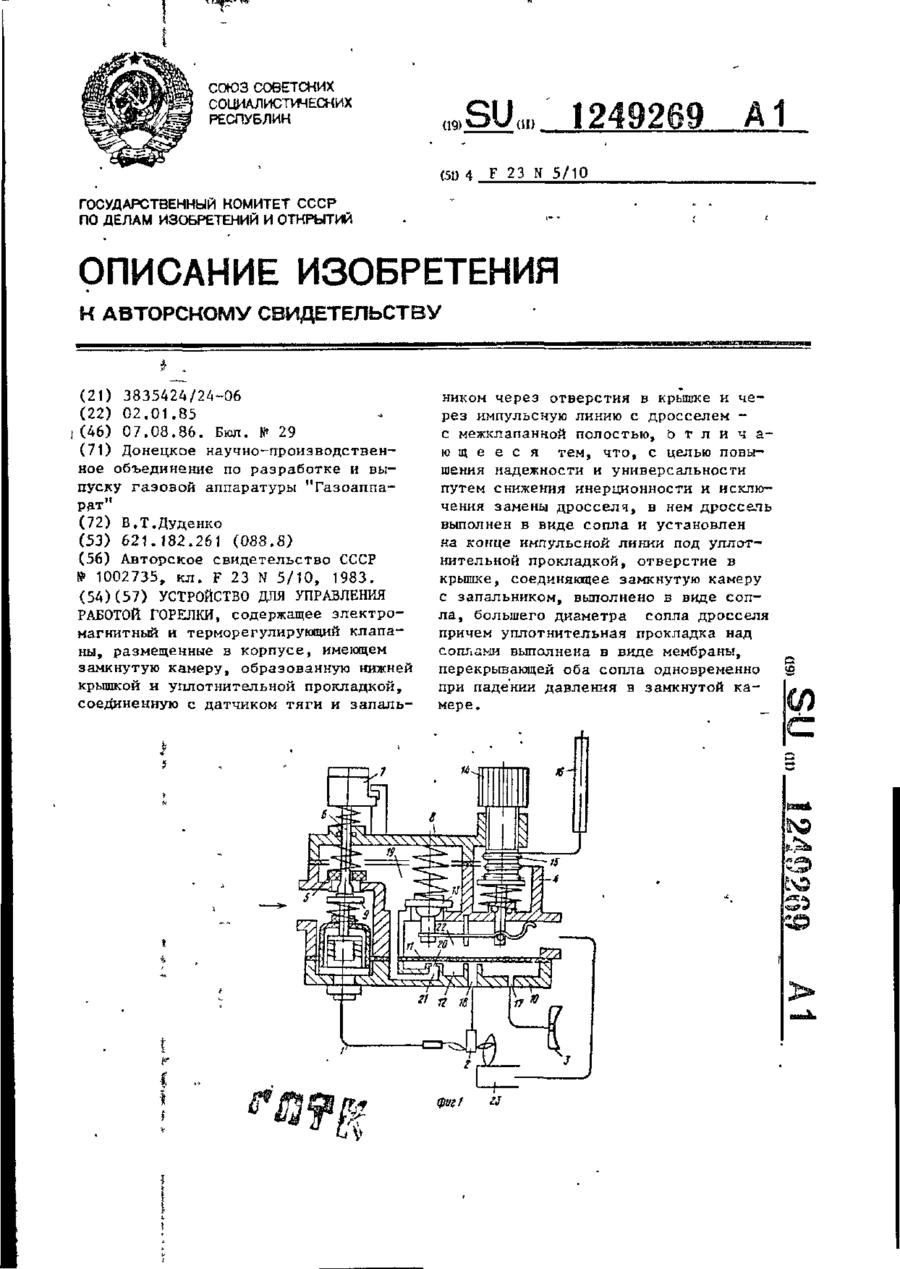
(57) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ГОРЕЛКИ, содержащее электромагнитный и терморегулирующий клапаны, размещенные в корпусе, имеющем замкнутую камеру, образованную нижней крышкой и уплотнительной прокладкой, соединенную с датчиком тяги и запальником через отверстия в крышке и через импульсную линию с дросселем - с межклапанной полостью, отличающееся тем, что, с целью повышения надежности и универсальности путем снижения инерционности и...
Спосіб дістанційного керування рухомим об’єктом та пристрій для його здійснення
Номер патенту: 1733
Опубліковано: 25.10.1994
Автор: Сімікін Костянтин Михайлович
МПК: A63H 23/00, A63H 29/00
Мітки: дистанційного, спосіб, здійснення, об'єктом, рухомим, керування, пристрій
Формула / Реферат:
1. Способ дистанционного управлення подвижным объектом, заключающийся в том, что на постоянный магнит объекта воздействуют управляющим полем электромагнита, отличающийся тем, что, с целью повышения игрового эффекта, управляющее магнитное поле формируют плоским и коммутируют его в направлениях, перпендикулярных одно другому, а ось намагниченности постоянного объекта ориентируют ортогонально плоскости управляющего магнитного поля. 2....
Пристрій для керування реверсивним електродвигуном
Номер патенту: 1507
Опубліковано: 25.07.1994
Автори: Максименко Василь Павлович, Бенсман Володимир Григорович, Ткаченко Анатолій Іванович, Будко Віктор Никифорович
МПК: H02P 1/26
Мітки: пристрій, електродвигуном, керування, реверсивним
Формула / Реферат:
Устройство для управления реверсивным электродвигателем, содержащее контакторы "Вперед" и "Назад" с катушкой и замыкающим контактом каждый, кнопку "Стоп", один вывод которой предназначен для подключения к одной шине источника питания, другой вывод кнопки "Стоп" подключен к одним выводам шунтированных замыкающими контактами кнопок "Пуск перед" и "Пуск назад" соответствующих...
Попередній патент: Система керування та захусту судового газотурбінного устаткування
Наступний патент: Спосіб формування свердловинних зарядів вибухових речовин в обводненних породах
Випадковий патент: Крем-бальзам "эффект-актив 1"